Изобретение относится к Элементам систем автоматического регулирования и может быть использовано в качестве дискретного датчика угла, например, в системах числового программного управления станками и роботами.
Целью изобретения является повышение точности за счет уменьшения погрешности квантования по уровню.
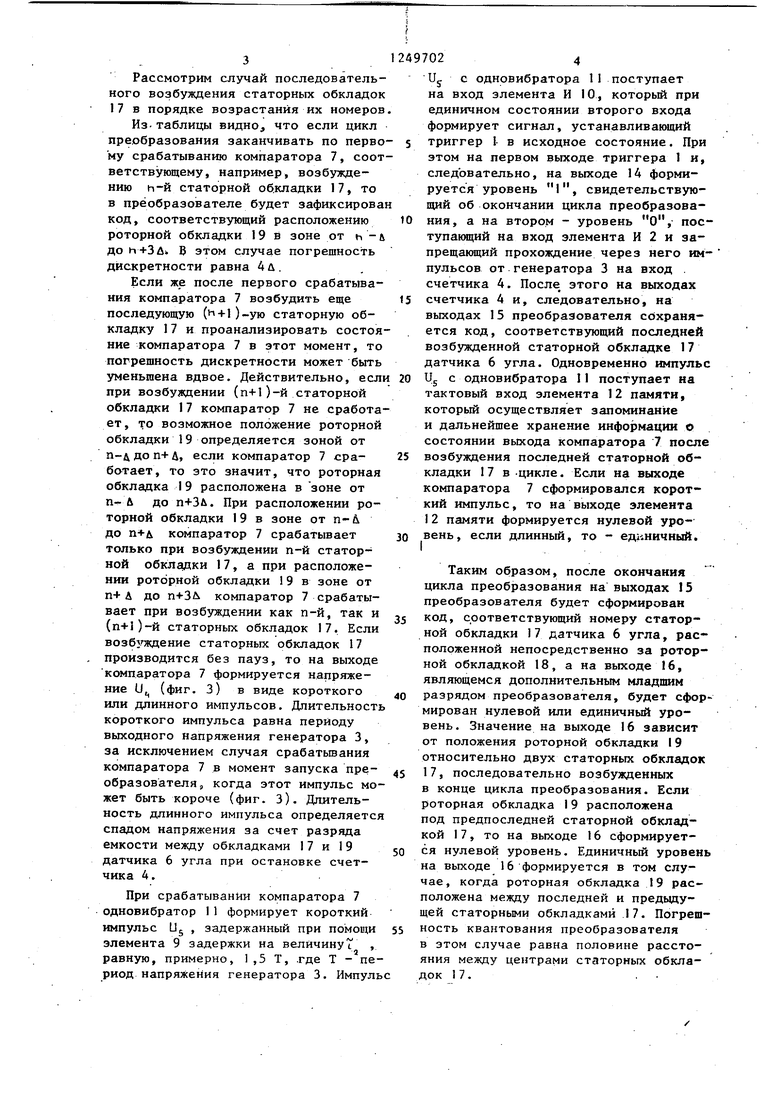
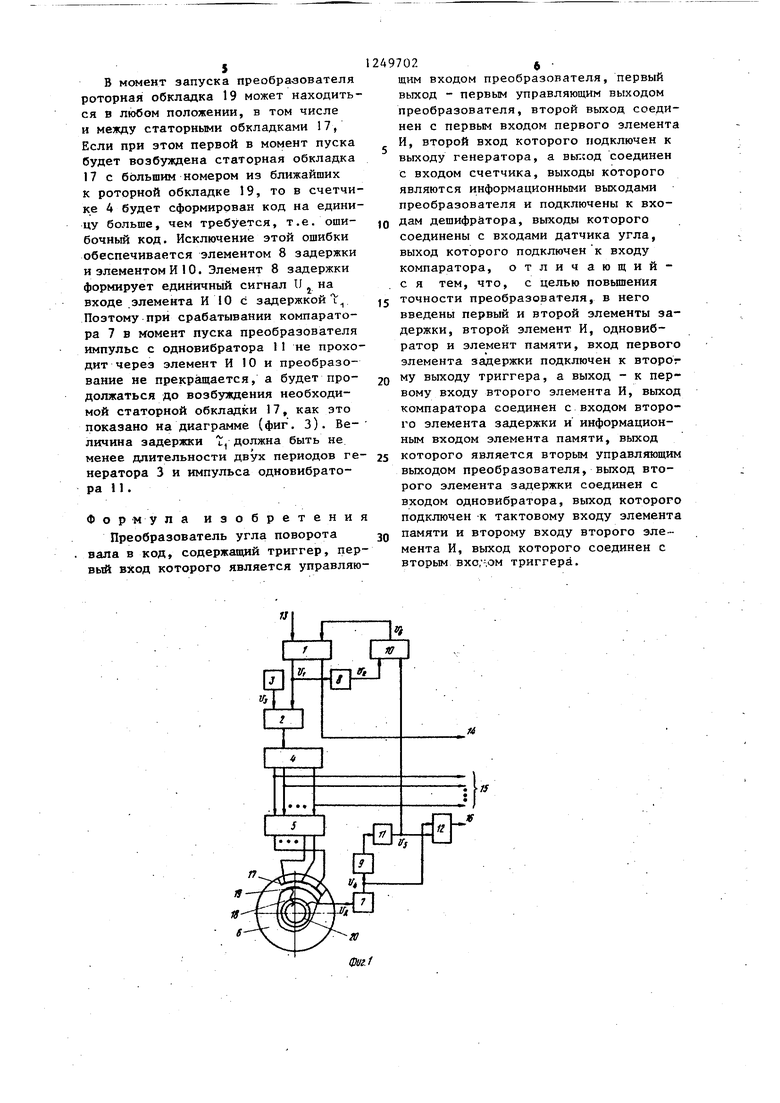
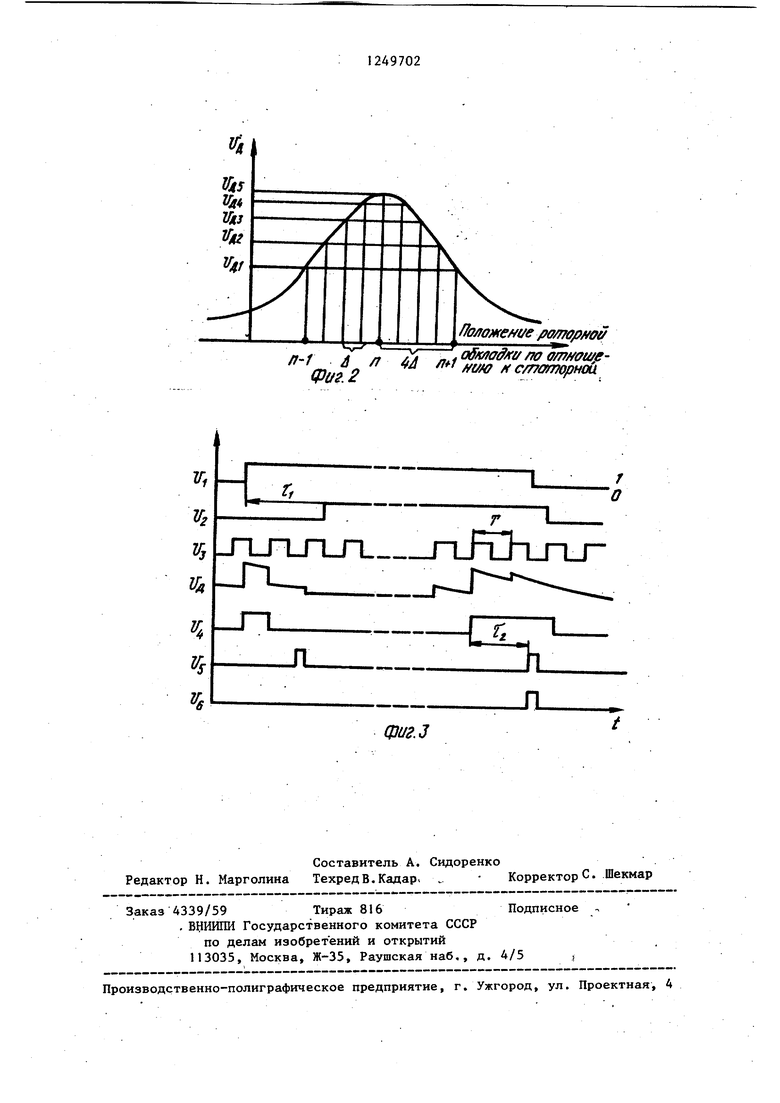
На фиг. 1 изображена схема преобразователя угла поворота вала в код; на фиг. 2 - зависимость амплитуды сигнала датчика угла от положения роторной обкладки относительно ста- торных; на фиг. 3 - временная диаграмма напряжений в различных точках преобразователя.
Преобразователь угла поворота вала в код содержит триггер 1, элемент И 2, генератор 3, счетчик 4, дешифратор 5, датчик 6 угла (емкостной) компаратор 7 (с гистерезисцой характеристикой) , элементы 8 и -9 задержки, элемент И 10, одновибратор 11,
элемент 12 памяти, .управляющий вход 13 и вьрсоды 14-16. Датчик 6 угла содержит статорные обкладки 17 в виде узких проводников, параллельных оси датчика 6, количество которых соответствует диапазону преобразования преобразователя, ротор 18 с роторной обкладкой 19, параллельной статорным обкладка(м 17, узел 20 с-ьема сигнала с роторной обкладки.
Преобразователь угла поворота вала в код работает следующим образом.
При поступлении запускающего.импульса на управляющий вход 13 триггер 1 изменяет свое состояние и формирует на втором выходе сигналу., , соответствующий 1, который разрешает прохождение импульсов генератора 3 через элемент И 2 на вход счетчика 4. Изменение состояний счетчи- ка 4 изменяет и состояния выходов дешифратора 3. В каждом новом состоянии дешифратор 5 возбуждает очередную статорную обкладку 17 датчика
6 угла, так как подает напряжение обкладки 19,
(п-1)-Д; (n-l)+u П-д I n+u (п+1 )-6,
;
(п-1 ) + й 1 (п-1 )+Зл, П+& п+Зй (п+1 )+4
Границы зоны расположения роторной обкладки 19
Номера статорных обкладок 17, при возбуждении которых срабатывает компаратор 7
п-1
2497022
на обкладку 17. Возбуждение статор- ных обкладок 17, расположённых вбли- . зи роторной обкладки 19, вызывает появление на последней, вследствие
5 наличия емкостной связи, наведенного напряжения, которое снимается через узел 20 съема сигнала.
На фиг. 2 приведена зависимость амплитуды выходного.сигнала ид дат10 ика 6 угла от положения роторной обкладки 19 относительно ,статорной Обкладки 17 с номером и при возбуждении последней. Максимальная величина сигнала Ьд , равнаяU; , соответ15 ствует расположению роторной обкладки 19 точно под статорной обкладкой 17. При смещении роторной обкладки 19 в ту или, иную сторону величина сигнала Уд уменьшается. На фиг. 2
20 приведены значения сигнала Уд(Уд,, ...,U) при фиксированных положениях роторной обкладки 19 с интервалом i , равным четверти расстояния между центрами соседних статорных
обкладок 17. Сигнал Од с выхода датчика 6 угла поступает на вход компаратора 7. Поскольку вершина импульсов на выходе датчика 6 угла может иметь значительный спад (фйг.З), то для устойчивости работы преобразователя компаратор 7 должен иметь гистерезисную характеристику. Порог срабатывания компаратора 7 устанавливается равным величине U (фиг. 2). Ширина гисте.резиса должна быть не менее величины спада вершины импульса Уд , но не более разности Чд -U (фиг. 2).
В этом случае при последовательном возбуждении статорных обкладок 17 компаратор 7 срабатывает при возбуждении либо одной, либо двух блц- жайших к роторной обкладке 19 статорных обкладок 17. I
В таблице приведены номера статорных обкладок 17, при возбуждении которых срабатьгоает компаратор 7 в зависимости от положения роторной
п-1 ;п
п
п;п+1 п+1
3 . . Рассмотрим случай последовательного возбуждения статорных обкладок 17 в порядке возрастания их номеров
Из-таблицы видно, что если цикл преобразования заканчивать по первому срабатыванию компаратора 7, соответствующему, например, возбуждению h-й статорной об.кладки 17, то в преобразователе будет зафиксирова код, соответствующий расположению роторной обкладки 19 в зоне от h -ь до h+3ui. В этом случае погрешность дискретности равна 4 д .
Если же после первого срабатывания компаратора 7 возбудить еще последующую (ь+1)-ую статорную обкладку I7 и проанализировать состояние компаратора 7 в этот момент, то погрешность дискретности может быть уменьшена вдвое. Действительно, если при возбуждении (п+1)-и статорной обкладки 17 компаратор 7 не сработает, то возможное положение роторной обкладки 19 определяется зоной от П-& до п+ Д, если компаратор 7 сра- батает, то зто значит, что роторная обкладка I9 расположена в зоне от п- & до п+ЗЛ. При расположении роторной обкладки 19 в зоне от п & до компаратор 7 срабатывает только при возбуждении п-й статорной обкладки 17, а при расположении роторной обкладки 19 в зоне от п+Д до п+Зл компаратор 7 срабатывает при возбуждении как п-й, так и (п+1)й статорных обкладок 17. Если возб гждение статорных обкладок 17 производится без пауз, то на выходе компаратора 7 формируется напряжение и (фиг. З) в виде короткого или длинного импульсов. Длительность короткого импульса равна периоду выходного напряжения генератора 3, за исключением случая срабатьшания компаратора 7 в момент запуска преобразователя, когда этот импульс может быть короче (фиг. 3). Длительность длинного импульса определяется спадом напряжения за счет разряда емкости между обкладками 17 и 19 датчика 6 угла при остановке счетчика 4.
При срабатывании компаратора 7 одновибратор I1 формирует короткий импульс Ug , задержанный при помощи элемента 9 задержки на величинуГ , равную, примерно, 1,5 Т, .где Т - период напряжения генератора 3. Импуль
7024
Uj с одновибратора 11 поступает на вход элемента И 10, который при единичном состоянии второго входа формирует сигнал, устанавливающий триггер 1 в исходное состояние. При этом на первом выходе триггера 1 и, следовательно, на выходе 14 формируется уровень 1, свидетельствующий об окончании цикла преобразования, а на втором - уровень О, поступающий на вход элемента И 2 и запрещающий прохождение через него им- пульсов от генератора 3 на вход . счетчика 4. После этого на выходах
счетчика 4 и, следовательно, на
выходах 15 преобразователя сохраняется код, соответствующий последней возбужденной статорной обкладке 17 датчика 6 угла. Одновременно импульс
Uj - одновибратора 11 поступает на тактовый вход элемента 12 памяти, который осуществляет запоминание и дальнейшее хранение информации о состоянии выхода компаратора 7 после
возбуждения последней статорной обкладки 17 в-цикле. Если на выходе компаратора 7 сформировался короткий импульс, то на выходе элемента 12 памяти формируется нулевой уровень, если длинный, то - единичный.
Таким образом, после окончания цикла преобразования на выходах I5 преобразователя будет сформирован
код, соответствующий номеру статорной обкладки 17 датчика 6 угла, расположенной непосредственно за роторной обкладкой 18, а на выходе 16, являющемся дополнительным младшим
разрядом преобразователя, будет сформирован нулевой или единичный уровень. Значение на выходе 16 зависит от положения роторной обкладки I9 относительно двух статорных обкладок
17, последовательно возбужденных в конце цикла преобразования. Если роторная обкладка I9 расположена под предпоследней статорной обкладкой 17, то на выходе 16 сформируется нулевой уровень. Единичный уровень на выходе 16 формируется в том случае, когда роторная обкладка 19 расположена между последней и предьщу- щей статорными обкладками 17. Погрешность квантования преобразователя в этом случае равна половине расстояния между центрами статорных обкладок 17..
$
в момент запуска преобразователя оторная обкладка 19 может находиться в любом положении, в том числе и между статорными обкладками 17, Если при этом первой в момент пуска будет возбуждена статорная обкладка 17 с большим номером из ближайших к роторной обкладке 19, то в счетчике 4 будет сформирован код на единицу больше, чем требуется, т.е. ошибочный код. Исключение этой ошибки обеспечивается элементом 8 задержки и элементом И 10. Элемент 8 задержки формирует единичный сигнал U на входе элемента И 10 с задержкой Т Поэтому при срабатывании компаратора 7 в момент пуска преобразователя импульс с одновибратора 11 не проходит через элемент И 10 и преобразование не прекращается, а будет продолжаться до возбуждения необходимой статорной обкладки 17, как это показано на диаграмме (фиг. З). Be- личина задержки t, должна быть не менее длительности двух периодов генератора 3 и импульса одновибратора 1 1 .
Формула изобретения
Преобразователь угла поворота вала в код, содержащий триггер, первый вход которого является управляю497026
щим входом преобразователя, первый вьпсод - первые управляющим выходом преобразователя, второй выход соединен с первым входом первого элемента И, второй вход которого подключен к выходу генератора, а вьпюд соединен с входом счетчика, выходы которого являются информационными выходами преобразователя и подключены к вхоQ дам дешифратора, выходы которого соединены с входами датчика угла, выход которого подключен к входу компаратора, отличающий- с я тем, что, с целью повьш1ения
5 точности преобразователя, в него
введены первый и второй элементы задержки, второй элемент И, одновиб- ратор и элемент памяти, вход первого элемента задержки подключен к второг му выходу триггера, а выход - к первому входу второго элемента И, выход компаратора соединен с входом второго элемента задержки и информационным входом элемента памяти, выход которого является вторым управляющим выходом преобразователя, выход второго элемента задержки соединен с входом одновибратора, выход которого подключен -к тактовому входу элемента памяти и второму входу второго элемента И, выход которого соединен с вторым вхо, -,ом триггера.
0
5
0
| название | год | авторы | номер документа |
|---|---|---|---|
| Преобразователь угла поворота вала в код | 1986 |
|
SU1361711A1 |
| Преобразователь угла поворота вала в код | 1983 |
|
SU1113828A1 |
| Преобразователь угла поворота вала в код | 1982 |
|
SU1043705A1 |
| Преобразователь перемещения в код | 1987 |
|
SU1481886A1 |
| Многошпиндельный гайковерт | 1984 |
|
SU1232468A1 |
| Устройство для моделирования синусно-косинусного трансформаторного датчика угла | 1990 |
|
SU1778766A1 |
| Устройство для счета движущихся предметов | 1985 |
|
SU1259309A1 |
| Преобразователь перемещения в код | 1986 |
|
SU1443175A1 |
| Устройство для измерения перемещений | 1986 |
|
SU1357695A1 |
| Вычислительное устройство для определения параметров пика | 1988 |
|
SU1562937A1 |
Изобретение относится к элементам автоматического регулирования и может быть использовано в качестве дискретного датчика угла, например, в системах числового программного управления станками и роботами. Це- лью изобретения является повышение точности за счет уменьшения погрешности квантования по уровню. Для этого в преобразователь, содержащий триггер, первый элемент И, генератор, счетчик, дешифратор и компаратор, введены первый и второй элементы задержки, второй элемент И, одновибра- тор и элемент памяти. На статорные обмотки датчика угла йоочереди подаются импульсы, формируемые генератором, счетчиком и дешифратором. С помощью компаратора, элемента задержки, одновибратора и элемента памяти определяется, с каких статориых обмоток поступил сигнал, и затем определяется положение роторной обкладки относительно статорных обкладок, что обеспечивает повьшение точности преобразователя. 3 ил. 1О (а СО Ч
й(
., л л ofMaff/fff/Ю O/77f/ffU/ . //t/Mf /f с/77оторнои (flus.
/7ff/7ff e f/ff ууащ1 М7&
фиг.З
| Дискретный датчик угла поворота вала | 1973 |
|
SU467386A1 |
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
| Преобразователь угла поворота вала в код | 1982 |
|
SU1043705A1 |
