Изобретение относится к области железнодорожного транспорта, а именно к области обеспечения безопасного движения транспортных средств, и может быть использовано для повышения уровня безопасности движения транспорта на железнодорожных переездах
Известна система ситуационного контроля состояния переезда («Железнодорожный транспорт №6 2015 г. стр. 6-7), в которой занятость переезда определяется при помощи сверхвысокочастотных датчиков, информация о занятости используется для включения заградительного светофора и передается машинисту поезда по радиоканалу, а стационарно установленные видеокамеры служат для фиксации ситуации занятого переезда. Аналогичное решение предлагается в
(http://scbist.com/pereezdnaya-signalizaciya/3869-kompleks-kontrolya-zheleznodorozhnyh-pereezdov.html) с отличием в том, что занятость переезда определяется при помощи двух пар направленных оптических приемопередатчиков и применена схема ускоренного включения радиопередающего устройства.
Известен «Комплекс обеспечения безопасности железнодорожных переездов» (https://tvema.ru/553), обеспечивающий автоматический контроль занятости зоны переезда с момента включения переездной сигнализации для выявления оставшихся там транспортных средств, управление заградительным светофором, голосовое оповещение об аварийной ситуации с возможностью его передачи по радиоканалу на частотах поездной или станционной радиосвязи, фиксацию и архивирование случаев нарушения правил проезда и актов вандализма на железнодорожных переездах.
Работа комплекса построена таким образом, что в отсутствии сигнала приближения поезда производится поочередный опрос оптических датчиков ИК-диапазона для выявления случаев повреждения, разъюстировки или засветки. При обнаружении неработающего датчика выдается сигнал неисправности. После поступления сигнала о приближении поезда и опускания шлагбаума, системы комплекса начинают анализ наличия препятствий в зоне переезда, а в случае обнаружения препятствия срабатывает система оповещения (речевой информатор на переезде), осуществляется передача голосового предупреждения по УКВ радиостанции диспетчеру или машинисту, начинается управление заградительным светофором. Также можно передать видеоинформацию на монитор в кабину машиниста приближающегося поезда. Этот комплекс является одним из самых близких к предлагаемой системе технических средств.
Другим таким же близким к предлагаемой системе техническим средством является система удаленного контроля и информирования машиниста о занятости железнодорожного переезда, содержащая установленные на переезде видеокамеры, первое устройство приема-передачи радиосигнала, связанное с устройством формирования сигнала тревоги и видеокадра, и размещенное на локомотиве второе устройство приема-передачи радиосигнала, подключенное к управляющему контроллеру, видеомонитору, запоминающему устройству и тревожным сигнализаторам (патент RU 313465, МПК B61L 29/00, опубликован 27.12.2007).
Все перечисленные решения имеют ряд недостатков, основными из которых являются следующие:
- «Занятость» переезда определяется по пересечению светового потока в видимом или инфракрасном диапазоне, иногда с дополнительным использованием датчиков движения. Такой метод позволяет, в лучшем случае, определить размеры объекта на переезде, но не его характеристики. Кроме того, может определяться ложная «занятость» при выходе из строя или загрязнении одного или нескольких излучателей или приемников излучения, при листопаде и снегопаде, в условиях сильного тумана или отказ системы при паразитной засветке одного или нескольких приемников излучения. Использование в качестве детекторов, определяющих свободность или занятость зоны переезда СВЧ детекторов также не позволяет определить характеристики объекта, находящегося в контролируемой зоне. Отсюда частота необоснованных срабатываний сигнализации при нахождении в контролируемой зоне объектов, которые могут либо быть быстро удалены (пешеход, велосипед, домашнее животное), либо не представляют опасности для приближающегося поезда (бумажный мусор, наметенная листва или снег и т.п.).
- Сигнализация о занятости переезда при помощи средств поездной радиосвязи производится безадресно, что не позволяет обеспечить своевременную реакцию машиниста на полученный сигнал тревоги. В то же время, поскольку система реагирует на нахождение любого предмета в зоне контроля, сигнал тревоги будет подаваться весьма часто и со всех переездов, закрытых по приближению поезда. Выделение на этом фоне засоренного эфира того сообщения, которое относится к данному конкретному поезду и данному конкретному переезду, потребует постоянной максимальной концентрации внимания машиниста только на сигналах поездной радиостанции.
Условия передачи тревожного сигнала на приближающийся к переезду поезд никак не зависят от постоянных и переменных характеристик поезда, таких как его скорость, вес, значение тормозного коэффициента и т.д. Выставление запрещающего сигнала на заградительном светофоре не гарантирует остановку поезда перед занятым переездом, особенно в случае высокоскоростных или тяжеловесных поездов. При этом точка принятия решения о применении того или иного торможения определяется машинистом «на глаз». Слишком раннее торможение может быть необоснованным, т.к. ситуация на переезде может измениться, слишком позднее или недостаточно эффективное торможение может привести к катастрофическим последствиям на занятом переезде.
Машинист принимает обобщенный сигнал «Занятый переезд» и не имеет возможности оценить степень опасности, спрогнозировать возможное развитие ситуации и принять обоснованное решение о применении (или неприменении) торможения поезда. Не вызванное необходимостью экстренное торможение поезда приводит к срыву графика движения, износу рельсов и бандажей колес, а в случае тяжеловесных грузовых поездов само по себе может привести к тяжелым последствиям, вплоть до выдавливания вагонов. С другой стороны, неприменение торможения в случае действительно занятого переезда приводит к катастрофическим последствиям при столкновении. В решении, предлагаемом как прототип, заявлена принципиальная возможность передачи видеоизображения на борт локомотива, но не раскрыты механизм и алгоритм выполнения заявленной функции.
Техническим результатом, на достижение которого направлено данное изобретение, является повышение достоверности распознавания занятости железнодорожного переезда, информирование машиниста о занятости переезда за время, достаточное для остановки поезда с применением полного служебного или экстренного торможения с выводом видеокадра обстановки на переезде на монитор пульта управления локомотивом. Технический результат достигается за счет того, что система удаленного контроля и информирования машиниста о занятости железнодорожного переезда, содержащая установленные на переезде видеокамеры, первое устройство приема-передачи радиосигнала, связанное с устройством формирования сигнала тревоги и видеокадра, и размещенное на локомотиве второе устройство приема-передачи радиосигнала, подключенное к управляющему контроллеру, видеомонитору, запоминающему устройству и тревожным сигнализаторам, снабжена средством определения занятости переезда, предназначенным для формирования сигнала о наличии объекта на переезде в случае соответствия этого объекта заранее заданным параметрам по форме и размеру, подключенным к видеокамерам и первому устройству приема-передачи радиосигнала, а управляющий контроллер подключен к средству, осуществляющему расчет тормозных кривых, и выполнен с возможностью формирования сигнала запроса информации о наличии объекта на переезде при приближении на заданное время хода к точке начала полного служебного или экстренного торможения перед ближайшим переездом, при этом средство определения занятости переезда выполнено с возможностью формирования сигнала о наличии объекта на переезде при получении указанного запроса. В качестве средства расчета тормозных кривых используется соответствующее средство, связанное со средством определения скорости локомотива, текущей координаты, даты и времени, и модулем хранения характеристик локомотива и поезда, причем указанные средства входят в имеющиеся на борту локомотива системы автоведения поезда или системы управления торможением, или системы обеспечения безопасности. В качестве второго устройства приема-передачи радиосигнала используются соответствующие устройства, входящие в имеющиеся на борту локомотива системы автоведения поезда или системы обеспечения безопасности.
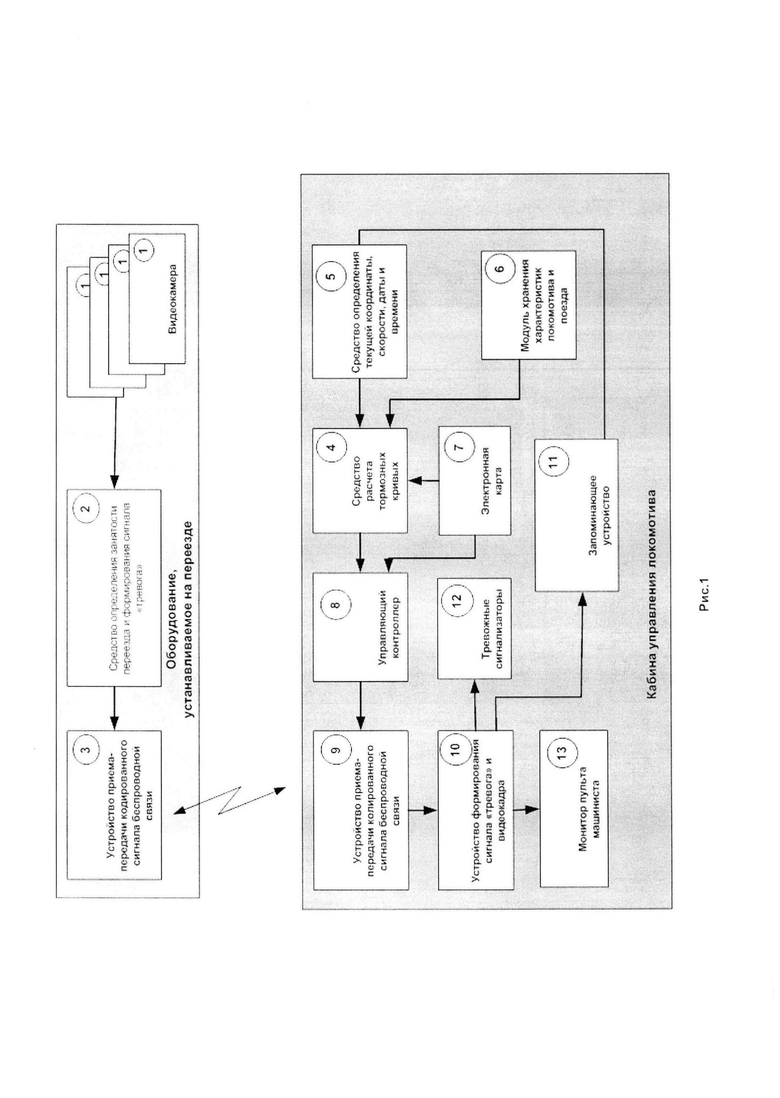
На рис. 1 показана предлагаемая система состоящая из оборудования, устанавливаемого на железнодорожном переезде, и оборудования, устанавливаемого на борту локомотива.
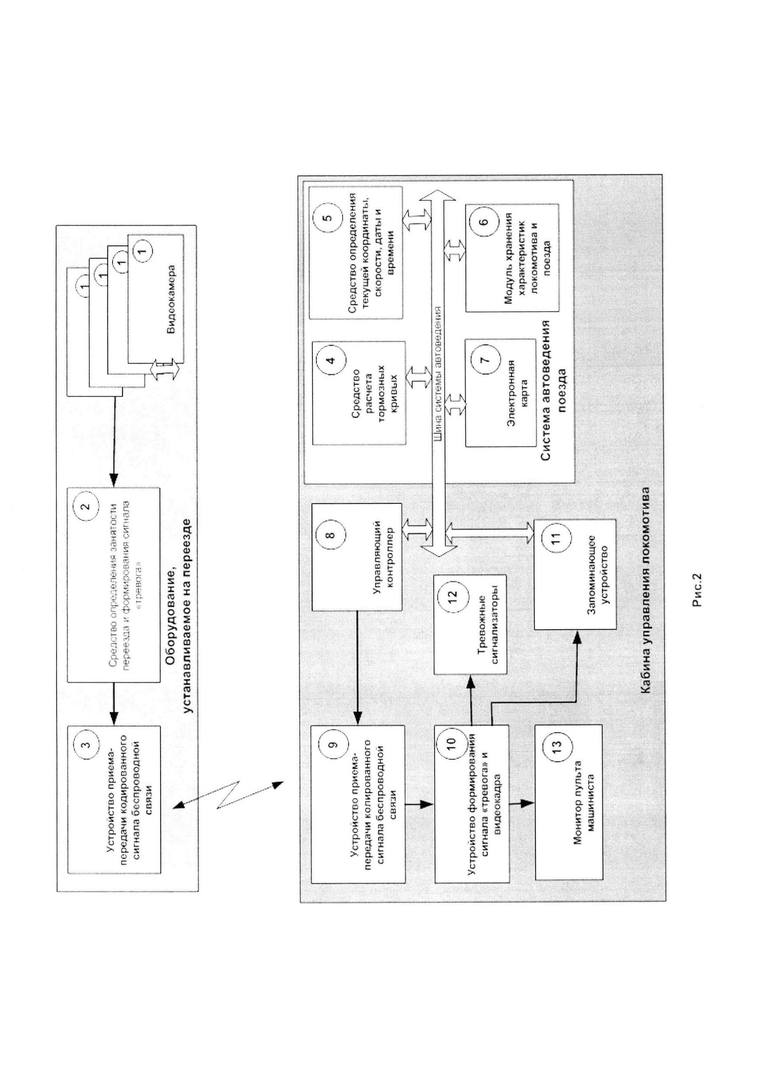
На рис. 2 показана система, где в качестве средства расчета тормозных кривых использована система автоведения поезда или система обеспечения безопасности движения.
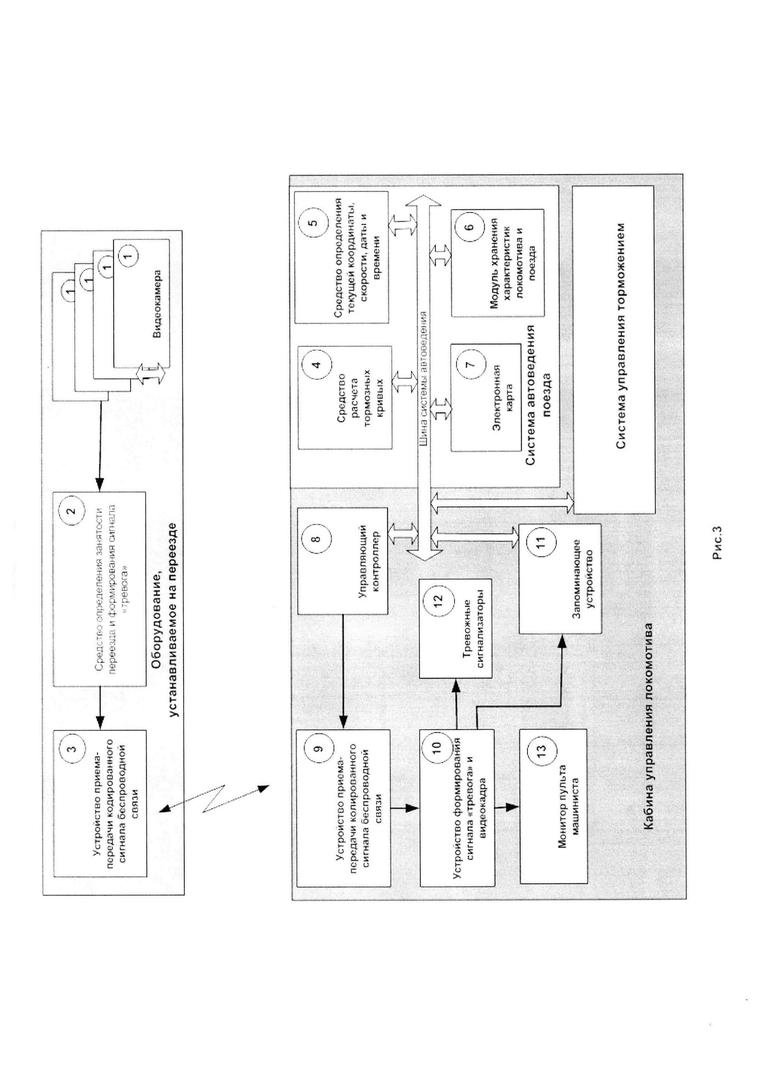
На рис. 3 показана система, где торможение (служебное или экстренное) поезда при наличии сигнала «тревога» может осуществляться автоматически системой автоведения, системой безопасности или системой автоматического управления торможением.
Видеосигнал от одной или нескольких видеокамер (1) поступает на устройство (2), в котором производится анализ изображения и по заранее заданным критериям (размер и форма объекта) определяется наличие занятости переезда и формируется сигнал «тревога». Сигнал «тревога» и сформированное изображение обнаруженного на переезде объекта передаются в устройство (3), находящееся в режиме ожидания вызова по беспроводной связи. В качестве беспроводной связи могут быть использованы сети GSM/GPRS, в частности, корпоративная сеть РОРС, интерфейс Wi-Fi или другие беспроводные интерфейсы, использующие абонентский номер или IP адрес.
На борту локомотива (пригородного поезда) в устройстве (4) производится непрерывный расчет тормозных кривых из расчета полной остановки поезда перед ближайшим переездом. Кривые рассчитываются в двух вариантах - из условий применения полного служебного или экстренного торможения. Для расчета тормозных кривых используются данные о текущей координате поезда и его скорости, получаемые от устройства (5), характеристики локомотива и поезда, введенные перед поездкой в модуль (6), и данные электронной карты маршрута (7). При приближении на заданное время хода к точке начала полного служебного торможения перед ближайшим переездом устройство (4) передает в управляющий контроллер (8) сигнал о приближении к началу торможения. Управляющий контроллер (8) формирует и передает в устройство (9) команду на формирование запроса с абонентским номером или IP адресом выбранного переезда, полученным из электронной карты (7).
Устройство (3), находящееся на переезде, приняв запрос от локомотивного устройства (9) формирует и передает на локомотив ответную посылку с кодом наличия или отсутствия сигнала «тревога». При наличии сигнала «тревога» дополнительно на борт локомотива передается видеоизображение переезда в статическом, динамическом или квазидинамическом режимах, в зависимости от пропускной способности выбранного беспроводного интерфейса связи. При использовании в качестве канала связи корпоративной сети беспроводной связи РОРС посылка с кодом «тревога» с приложенным видеокадром одновременно передается на сервер управления движением. Передача ведется циклически до получения от локомотива ответа с кодом «конец связи», видеоинформация с кодом «тревога» архивируется и запоминается.
Локомотивное устройство (9), приняв ответную посылку от устройства (3), передает ее в локомотивное устройство формирования сигнала «тревога» и формирования видеокадра (10). Принятая информация перелается в запоминающее устройство (11) для архивирования с указанием даты и времени приема с целью последующего разбора причин применения торможения, сбоя графика движения или происшествия на переезде. При наличии в принятой посылке кода «тревога» включаются тревожные сигнализаторы (12) на пульте машиниста (световые, звуковые или речевые или в любой комбинации), а принятый видеокадр выводится на монитор пульта машиниста (13) для оценки ситуации. При отсутствии кода «тревога» повторный запрос на переезд формируется и передается локомотивной аппаратурой при приближении на заданное время хода к точке начала экстренного торможения. Дальнейший алгоритм действий системы аналогичен описанному выше. После проследования координаты контролируемого переезда управляющий контроллер (8) формирует команду устройству (9) на передачу сообщения с кодом «конец связи». Устройство (3), получив сообщение с кодом «конец связи», прекращает сеанс связи с данным абонентом и переходит в режим ожидания вызова. Локомотивная аппаратура переходит в режим расчета тормозных кривых и формирования запроса на следующий по маршруту железнодорожный переезд, оборудованный системой. В качестве средства расчета тормозных кривых, включающего в себя вспомогательные модули и базы данных, может быть использована система автоведения поезда или система обеспечения безопасности движения (рис. 2). В этом случае управляющий контроллер и запоминающее устройство подключаются непосредственно к шине системы автоведения (системы безопасности) и получают всю необходимую информацию в цифровом виде по согласованному протоколу обмена. Решение о применении служебного или экстренного торможения перед переездом при получении сигнала «тревога» принимает машинист локомотива с учетом полученного видеокадра. Торможение (служебное или экстренное) поезда при наличии сигнала «тревога» может осуществляться также автоматически системой автоведения, системой безопасности или системой автоматического управления торможением (рис. 3). В предлагаемом устройстве в отличие от прототипа:
- занятость переезда определяется путем видеонаблюдения за контролируемой областью с анализом видеоизображения на соответствие заданным образам и размерам (автомобиль, автоприцеп, мотоцикл, бетонная плита и т.п.), несущими потенциальную опасность при столкновении. Тревожный сигнал формируется переездной аппаратурой в случае нахождения в контролируемой зоне объекта с заданным размером и образом и передается на борт локомотива и на сервер управления движением в сопровождении видеоизображения, что позволяет машинисту объективно оценить ситуацию и заблаговременно начать (или не начинать) торможение поезда, избегая применения экстренного торможения;
- сообщение о занятости переезда передается на борт локомотива по каналам сети GSM/GPRS адресно по запросу, формируемому локомотивной аппаратурой за время, достаточное для того, чтобы данный конкретный поезд, движущийся с конкретной скоростью, при применении заданного типа торможения мог гарантированно остановиться перед занятым переездом. Видеоизображение передается постоянно до тех пор, пока переездная аппаратура фиксирует состояние «переезд занят» архивируется и фиксируется в запоминающих устройствах на борту локомотива и сервера управления движением;
- расчет тормозных кривых и определение момента запроса состояния переезда может производиться автономными устройствами на борту локомотива с использованием электронной карты пути или штатными вычислителями систем автоведения поезда или систем обеспечения безопасности движения;
- передача запроса на состояние переезда и прием тревожного сигнала в сопровождении видеоизображения может производиться автономными устройствами на борту локомотива или штатными устройствами систем автоведения поезда или систем обеспечения безопасности движения;
- торможение перед занятым переездом по полученному тревожному сигналу может осуществляться машинистом в ручном режиме или автоматизированной системой управления торможением, интегрированной с системой автоведения поезда и системой обеспечения безопасности движения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ АВТОМАТИЧЕСКОЙ ПЕРЕЕЗДНОЙ СИГНАЛИЗАЦИЕЙ И СПОСОБ ЕЕ ОСУЩЕСТВЛЕНИЯ | 2021 |
|
RU2756140C1 |
| Стационарный комплекс обнаружения препятствий в области ограниченной видимости | 2019 |
|
RU2711480C1 |
| Инфраструктурная система технического зрения обеспечения безопасности движения поездов в области ограниченной видимости | 2020 |
|
RU2752155C1 |
| СПОСОБ МОНИТОРИНГА СОСТОЯНИЯ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ ПРИ ДВИЖЕНИИ ПОЕЗДА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2022 |
|
RU2829561C2 |
| СИСТЕМА АВТОМАТИЧЕСКОГО КОНТРОЛЯ СВОБОДНОСТИ ЗОНЫ ПЕРЕЕЗДА | 2020 |
|
RU2751041C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПОЕЗДОВ ПРИ ДИСПЕТЧЕРСКОЙ ЦЕНТРАЛИЗАЦИИ | 2013 |
|
RU2541585C2 |
| СИСТЕМА ДИСТАНЦИОННОГО КОНТРОЛЯ СОСТОЯНИЯ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2005 |
|
RU2313465C2 |
| Система автоматизированного регулирования скорости локомотива в зоне сближения с неохраняемыми и необслуживаемыми переездами | 2018 |
|
RU2696046C1 |
| Способ и система автоматического контроля зоны железнодорожного переезда | 2024 |
|
RU2840554C1 |
| ЛОКОМОТИВНАЯ СИСТЕМА ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ДВИЖЕНИЯ ПОЕЗДОВ | 2013 |
|
RU2554912C2 |
Изобретение относится к области железнодорожной автоматики для удаленного контроля и информирования машинистов о состоянии железнодорожных переездов. Система включает бортовую часть и установленные на переезде видеокамеры, устройство приема-передачи радиосигнала и средство определения занятости переезда, предназначенное для формирования сигнала о наличии объекта на переезде в случае соответствия этого объекта заранее заданным параметрам по форме и размеру. Причем бортовая часть включает размещенные на локомотиве устройство приема-передачи радиосигнала, управляющий контроллер, монитор машиниста, запоминающее устройство, тревожные сигнализаторы, средство расчета тормозных кривых, средство определения скорости локомотива, текущей координаты, даты и времени, модуль хранения характеристик локомотива и поезда, блок электронной карты маршрута, устройство формирования сигнала «тревога» и формирования видеокадра. Достигается повышение достоверности распознавания занятости железнодорожного переезда. 2 з.п. ф-лы, 3 ил.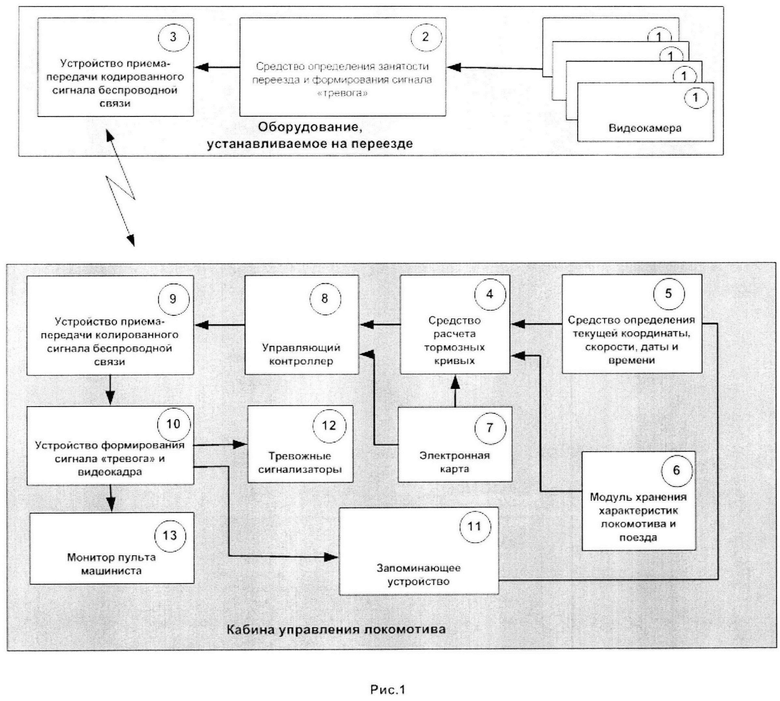
1. Система удаленного контроля и информирования машиниста о занятости железнодорожного переезда, содержащая установленные на переезде видеокамеры, первое устройство приема-передачи радиосигнала, связанное с устройством формирования сигнала тревоги и видеокадра, и размещенное на локомотиве второе устройство приема-передачи радиосигнала, подключенное к управляющему контроллеру, видеомонитору, запоминающему устройству и тревожным сигнализаторам, отличающаяся тем, что снабжена средством определения занятости переезда, предназначенным для формирования сигнала о наличии объекта на переезде в случае соответствия этого объекта заранее заданным параметрам по форме и размеру, подключенным к видеокамерам и первому устройству приема-передачи радиосигнала, а управляющий контроллер подключен к средству, осуществляющему расчет тормозных кривых, и выполнен с возможностью формирования сигнала запроса информации о наличии объекта на переезде при приближении на заданное время хода к точке начала полного служебного или экстренного торможения перед ближайшим переездом, при этом средство определения занятости переезда выполнено с возможностью формирования сигнала о наличии объекта на переезде при получении указанного запроса.
2. Система по п. 1, отличающаяся тем, что в качестве средства расчета тормозных кривых используется соответствующее средство, связанное со средством определения скорости локомотива, текущей координаты, даты и времени, и модулем хранения характеристик локомотива и поезда, причем указанные средства входят в имеющиеся на борту локомотива системы автоведения поезда, или системы управления торможением, или системы обеспечения безопасности.
3. Система по любому из пп. 1 или 2, отличающаяся тем, что в качестве второго устройства приема-передачи радиосигнала используются соответствующие устройства, входящие в имеющиеся на борту локомотива системы автоведения поезда или системы обеспечения безопасности.
| СИСТЕМА ДИСТАНЦИОННОГО КОНТРОЛЯ СОСТОЯНИЯ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2005 |
|
RU2313465C2 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| JP H 04266567 A, 22.09.1992 | |||
| DE 0019623524 A1, 27.11.2009 | |||
| Установка для поточной автоматической обработки пиленых деревянных заготовок в детали стула и сборки их в отдельные узлы | 1949 |
|
SU89055A1 |
| СИСТЕМА ДЛЯ РАДИОТЕЛЕФОННЫХ СООБЩЕНИЙ НА АВТОМАГИСТРАЛЯХ | 2011 |
|
RU2514132C2 |

