Изобретение относится к области бурения направленных и глубоких скважин с использованием забойных навигационных телесистем.
Известен способ контроля направления искривления ствола скважины в процессе бурения. Авторское свидетельство СССР № 1052653, Мкл.3 Е21В 47/02, опубл. 07.11.83. Бюл. № 41.
Способ основан на том, что при бурении наклонно направленных скважин на долото в плоскости забоя действует отклоняющая сила  , которая вызывает искривление ствола скважины. При наличии искривления ствола скважины и (или) при использовании каких-либо отклоняющих устройств отклоняющая сила
, которая вызывает искривление ствола скважины. При наличии искривления ствола скважины и (или) при использовании каких-либо отклоняющих устройств отклоняющая сила  имеет определенное направление. При работе долота на забое скважины долото генерирует поперечные волны, то есть работает как волновой излучатель, а так как наличие отклоняющей силы нарушает осевую симметрию излучателя, то поперечная волна, генерируемая долотом, становится линейно поляризованной, а это значит, что в каждом поперечном сечении бурильной колонны вектор смещения поперечной волны
имеет определенное направление. При работе долота на забое скважины долото генерирует поперечные волны, то есть работает как волновой излучатель, а так как наличие отклоняющей силы нарушает осевую симметрию излучателя, то поперечная волна, генерируемая долотом, становится линейно поляризованной, а это значит, что в каждом поперечном сечении бурильной колонны вектор смещения поперечной волны  не меняет своего положения относительно направления действия отклоняющей силы . Но по бурильной колонне распространяются волны, генерируемые многими источниками, например возникающие от работы турбобура, наземного оборудования. Таким образом, на устье скважины имеется суперпозиция поперечных волн, вызывающих изгибные (поперечные) колебания бурильной колонны. С помощью преобразователей колебаний в верхней части бурильной колонны регистрируют сигнал, отражающий изменение вектора смещения поперечных волн, распространяющихся по бурильной колонне, выделяют составляющую сигнала, вызванную изменением вектора смещения линейно поляризованной волны
не меняет своего положения относительно направления действия отклоняющей силы . Но по бурильной колонне распространяются волны, генерируемые многими источниками, например возникающие от работы турбобура, наземного оборудования. Таким образом, на устье скважины имеется суперпозиция поперечных волн, вызывающих изгибные (поперечные) колебания бурильной колонны. С помощью преобразователей колебаний в верхней части бурильной колонны регистрируют сигнал, отражающий изменение вектора смещения поперечных волн, распространяющихся по бурильной колонне, выделяют составляющую сигнала, вызванную изменением вектора смещения линейно поляризованной волны  , определяют направление этого вектора, по которому судят о направлении искривления ствола скважины.
, определяют направление этого вектора, по которому судят о направлении искривления ствола скважины.
Недостатком вышеописанного способа является то, что при проводке наклонных, горизонтальных и глубоких скважин силы трения при движении бурильной колонны и подаче долота могут быть больше заданной величины нагрузки на долото, что делает невозможным управление и оптимизацию режимов бурения.
Известен способ непрерывного контроля за направлением действия отклонителя. Патент № 2263782, МПК7 Е21В 47/02, G01C 19/00, опубликовано 20.05.2005. Бюл. № 31.
При этом непрерывный контроль за указанными параметрами осуществляют в натуральном масштабе времени по визуальному отображению на экране компьютера индикатора слежения за положением отклонителя относительно магнитного меридиана и величины азимутальных и зенитных углов, видимых на забойных датчиках. Устройство для осуществления способа содержит датчик измерения угла установки отклонителя и инклинометр с датчиками зенитных и азимутальных углов, размещенных в герметичном контейнере, ориентированно закрепленном в немагнитном корпусе, жестко связанном с отклонителем, а также проводной канал связи забойных датчиков с наземными регистрирующими приборами, сбрасываемый через бурильную колонну. Предложенное решение обеспечивает информацией о положении ствола и отклонителя при отсутствии данных с забоя о параметрах режима бурения и осевой нагрузке на долото.
Однако использование дополнительной забойной системы контроля забойных параметров режима бурения приводит к дополнительным затратам, включающим стоимость, прокат, ремонт, обслуживание, создание методического обеспечения, обучение и подготовку кадров.
Кроме того, в существующем способе отсутствует учет динамики бурильной колонны при оптимизации режимов бурения и операции по уходу из области высокоамплитудных продольных и крутильных колебаний.
Задача изобретения состоит в упрощении технологической оснастки, обеспечивающей передачу забойной информации, уменьшении трудоемкости измерений, аварийности работ, повышении их качества, надежности и расширении области применения.
Технический результат, который может быть получен при реализации изобретения, заключается в том, что предупреждают критические (аварийные) состояния бурильной колонны, оптимизируя процесс бурения по минимальным колебаниям азимута установки отклонителя, минимальным колебаниям нагрузки на долото измеренной датчиком веса станции контроля процессов бурения, минимальным колебаниям реактивного крутящего момента и максимуму механической, рейсовой скорости, проходки на долото, получают наглядную и достоверную забойную информацию о положении угла закручивания бурильной колонны 3, о фактической забойной нагрузке на долото, доходящей до забоя скважины, о фактическом реактивном (активном) крутящем моменте, с упрощенным технологическим обслуживанием, который позволит оперативно, с меньшими трудозатратами контролировать и управлять бурением в заданном направлении, предотвращая критические (аварийные) состояния бурильной колонны.
Поставленная задача достигается тем, что в способе контроля и управления забойными параметрами режима бурения, включающем использование забойной навигационной телесистемы, наземные системы контроля параметров режима бурения производят измерение на забое зенитного угла, азимута ствола скважины и установки отклонителя. Новым является то, что при первом замере без промывки скважины производят измерение забойной навигационной телесистемой азимута установки отклонителя A1, далее во втором замере при промывке и работе забойного двигателя, без создания нагрузки на долото производят измерение забойной навигационной телесистемой азимута установки отклонителя А2 и далее в следующих замерах при создании нагрузки на долото, измеряемой датчиком веса станции контроля процессов бурения, Pi, где i=3, 4,…, n, производят измерение забойной навигационной телесистемой азимута установки отклонителя Аi, где i=3, 4,…, n, далее по показаниям станции контроля процессов бурения определяют механическую скорость бурения Vi (i=3, 4,…, n), далее по показаниям датчика реактивного крутящего момента станции контроля процессов бурения определяют реактивный крутящий момент на долоте Мр и рассчитывают угол закручивания бурильной колонны:
- в первом замере забойной навигационной телесистемой азимута установки отклонителя A1 без промывки скважины и без создания нагрузки на долото, измеренной на поверхности датчиком веса станции контроля процессов бурения, P1=0 (схема первого замера фиг.1 и фиг.2, фиг.12 и фиг.13), угол закручивания бурильной колонны рассчитывают по формуле φ1=A1-A1=0;
- во втором замере забойной навигационной телесистемой азимута установки отклонителя А2, изменение которого зависит от реактивного крутящего момента, вызванного действием боковой отклоняющей силы на долоте при промывке и работе забойного двигателя, без создания нагрузки на долото, измеренной на поверхности датчиком веса станции контроля процессов бурения, Р2=0 (схема второго замера фиг.3 и фиг.4, фиг.14 и фиг.15), угол закручивания бурильной колонны рассчитывают по формуле φ2=А2-А1;
- в третьем и последующих замерах забойной навигационной телесистемой азимута установки отклонителя Аi, изменение которого зависит от реактивного крутящего момента, вызванного действием боковой отклоняющей силы на долоте, где i=3, 4,…, n, при промывке и работе забойного двигателя, при создании нагрузки на долото, измеренной на поверхности датчиком веса станции контроля процессов бурения, Рi, где i=3, 4,…, n (схема третьего, четвертого замера фиг.5 и фиг.6, фиг.7 и фиг.8, фиг.16 и фиг.17, фиг.18 и фиг.19), угол закручивания бурильной колонны рассчитывают по формуле φi=А2-Аi, где i=3, 4,…, n.
Далее рассчитывают оптимальный угол закручивания бурильной колонны φо=А2-Аi (i=3, 4,…n), соответствующий критериям оптимизации режима бурения, то есть оптимизации забойного угла закручивания бурильной колонны и нагрузки на долото, измеренной датчиком веса станции контроля процессов бурения, исходя из максимума механической, рейсовой скорости, проходки на долото, предупреждения аварий с долотом, которые происходят при максимальных колебаниях таких параметров, как азимут установки отклонителя измеряемый забойной навигационной телесистемой, нагрузка на долото, измеряемая датчиком веса станции контроля процессов бурения, и реактивный крутящий момент на долоте, измеряемый датчиком реактивного крутящего момента станции контроля процессов бурения.
Далее устанавливают отклонитель по оптимизированному азимуту установки отклонителя АУО=Ат+φо, где Ат - требуемый проектный азимут, φо - оптимальный угол закручивания бурильной колонны, АУО - оптимизированный азимут установки отклонителя, соответствующий максимуму механической, рейсовой скорости, минимуму колебаний значений азимута установки отклонителя Аi, минимуму колебаний угла закручивания бурильной колонны φi (i=3, 4,…, n), минимуму колебаний нагрузки на долото, измеренной датчиком веса станции контроля процессов бурения, минимальным колебаниям реактивного крутящего момента на долоте.
Критические состояния процесса бурения обнаруживают по максимальным колебаниям таких параметров, как азимут установки отклонителя, измеряемый забойной навигационной телесистемой, нагрузка на долото, измеряемая датчиком веса станции контроля процессов бурения, и реактивный крутящий момент на долоте, измеряемый датчиком реактивного крутящего момента станции контроля процессов бурения.
Далее для предупреждения аварий (критических ситуаций) рассчитывают фактическую забойную нагрузку Рф на долото, доходящую до забоя скважины, и фактический реактивный крутящий момент на долоте, исходя из величины угла закручивания бурильной колонны с использованием указанных ниже зависимостей, вышеперечисленные операции повторяются после остановки процесса бурения, промывки скважины после бурения очередного интервала, расхаживания бурильной колонны и наращивания бурильной трубы.
Расчетную фактическую нагрузку на долото, доходящую до забоя скважины, Рф и расчетный фактический реактивный крутящий момент на долоте  для предупреждения аварий рассчитывают в следующей последовательности: рассчитывают полярный момент инерции сечения бурильной колонны
для предупреждения аварий рассчитывают в следующей последовательности: рассчитывают полярный момент инерции сечения бурильной колонны

рассчитывают удельный момент на долоте

для первого вертикального и второго вертикального участков профиля ствола скважины момент силы сопротивления вращению бурильной колонны MCi рассчитывают по следующей формуле

а критическую длину по формуле (4)

если фактическая длина деформированной бурильной колонны L меньше критической длины деформированной бурильной колонны Lкр (L<Lкр), то в формуле (3) вместо критической длины деформированной бурильной колонны Lкр необходимо использовать фактическую длину деформированной бурильной колонны L, подставляя значения I, Муд, L или Lкр, φ, Mci в формулу (5), рассчитывают фактическую забойную нагрузку Рф на долото, доходящую до забоя скважины, и расчетный фактический реактивный крутящий момент на долоте на первом и втором вертикальном участке профиля ствола скважины, значения φо, А2 и Аi в радианах:

для участков профиля ствола скважины: набора (интенсивность приращения зенитного угла больше 0), стабилизации (интенсивность приращения зенитного угла равна 0), уменьшения зенитного угла (интенсивность приращения зенитного угла меньше 0), расчетную фактическую забойную нагрузку Рф на долото, доходящую до забоя скважины, и расчетный фактический реактивный крутящий момент на долоте рассчитывают по следующей формуле:


подставляя вычисленные значения Муд, Рф, расчетный фактический реактивный момент на долоте вычисляют по формуле,

где Рф - расчетная фактическая нагрузка на долото, доходящая до забоя скважины, Н;
Рi - нагрузка на долото, измеряемая датчиком веса станции контроля процессов бурения, где i=3, 4,…, n, Н;
Vi - механическая скорость бурения по показаниям датчика станции контроля процессов бурения, (i=3, 4,…, n), м/ч;
φi - угол закручивания бурильной колонны, где i=3, 4,…, n, рассчитывается по показаниям забойной навигационной телесистемы, град;
Pv.max - нагрузка на долото, измеряемая датчиком веса станции контроля процесса бурения, при которой был достигнут максимум механической скорости, при минимальных колебаниях нагрузки на долото, минимальных колебаниях угла закручивания бурильной колонны и при минимальных колебаниях крутящего момента в результате эксперимента, Н;
φо - оптимальный угол закручивания бурильной колонны, при котором был достигнут максимум механической скорости, при минимальных колебаниях нагрузки на долото, минимальных колебаниях угла закручивания бурильной колонны и при минимальных колебаниях крутящего момента, град;
Е - модуль упругости второго рода, модуль Юнга, Па;
I - полярный момент инерции сечения бурильной колонны, м4;
Lкр - критическая длина деформированной бурильной колонны, м;
L - длина скважины по стволу, м;
Муд - удельный момент на долоте, Н·м/Н;
Mci - момент силы сопротивления вращению бурильной колонны на первом и втором вертикальном участке профиля ствола скважины, где i=1 или 2, Н·м;
 - расчетный фактический активный крутящий момент сопротивления вращению долота, Н·м;
- расчетный фактический активный крутящий момент сопротивления вращению долота, Н·м;
Мзд - реактивный момент на валу забойного двигателя (паспортная характеристика), Н·м;
 - расчетный фактический реактивный крутящий момент на долоте, Н·м;
- расчетный фактический реактивный крутящий момент на долоте, Н·м;
Mp - реактивный крутящий момент на долоте по показаниям датчика реактивного крутящего момента станции контроля процессов бурения, Н·м;
А2 - азимут установки отклонителя до начала бурения, после подачи бурового раствора, запуска забойного двигателя, измеренный забойной навигационной телесистемой, град;
АУО - оптимальный азимут установки отклонителя после подачи бурильной колонны на забой и создания осевой нагрузки на долото Рi, при котором был достигнут максимум механической скорости при минимальных колебаниях нагрузки на долото, минимальных колебаниях угла закручивания бурильной колонны и при минимальных колебаниях крутящего момента, град;
Аi - азимут установки отклонителя, измеряемый забойной навигационной телесистемой, при i-м замере, где i=3, 4,…, n, град;
Aт - требуемый проектный азимут, град;
 - среднее значение зенитного угла на рассматриваемом интервале, град;
- среднее значение зенитного угла на рассматриваемом интервале, град;
Δα - приращение зенитного угла, град;
Δβ - приращение азимутального угла, град;
в - коэффициент, зависящий от диаметра долота;
к - коэффициент, зависящий от породы;
n - частота вращения долота, об/мин;
А' - коэффициент, зависящий от частоты вращения долота;
Dд - диаметр долота, м;
DБТ - внешний диаметр бурильных труб, м;
dБТ - внутренний диаметр бурильных труб, м;
g - ускорение свободного падения, м/с2;
q - вес 1 погонного метра бурильных труб в воздухе, Н;
π - число Пи, приблизительно равное 3,141592;
γ - угол охвата, град;
µ - коэффициент трения согласно опытным данным по данной площади.
На фиг.1 изображена схема первого замера для первого и второго вертикального участков профиля ствола скважины при отсутствии промывки и нагрузки на долото. На фиг.2 изображена схема первого замера для первого и второго вертикального участков профиля ствола скважины при отсутствии нагрузки на долото, вид сверху. На фиг.3 изображена схема второго замера для первого и второго вертикального участков профиля ствола скважины при промывке и работе забойного двигателя и отсутствии нагрузки на долото. На фиг.4 изображена схема второго замера для первого и второго вертикального участков профиля ствола скважины и показано изменение угла закручивания бурильной колонны при промывке и работе забойного двигателя и отсутствии нагрузки на долото, вид сверху. На фиг.5 изображена схема третьего замера для первого и второго вертикального участков профиля ствола скважины при промывке и работе забойного двигателя и создании первичной нагрузки на долото. На фиг.6 изображена схема третьего замера для первого и второго вертикального участков профиля ствола скважины при промывке и работе забойного двигателя и создании первичной нагрузки на долото, вид сверху. На фиг.7 изображена схема четвертого замера для первого и второго вертикального участков профиля ствола скважины при промывке и работе забойного двигателя и создании вторичной нагрузки на долото. На фиг.8 изображена схема четвертого замера для первого и второго вертикального участков профиля ствола скважины при промывке и работе забойного двигателя и создании вторичной нагрузки на долото, вид сверху. На фиг.9 изображена схема оптимизации параметров режима бурения для первого и второго вертикального участков профиля ствола скважины при создании оптимальной нагрузки на долото. На фиг.10 изображена схема оптимизации параметров режима бурения для первого и второго вертикального участков профиля ствола скважины при создании оптимальной нагрузки на долото, вид сверху. На фиг.11 изображена схема оптимизации параметров режима бурения для первого и второго вертикального участков профиля ствола скважины при создании оптимальной нагрузки на долото с целью достижения проектного азимута после поворота бурильной колонны, вид сверху. На фиг.12 изображена схема первого замера для участков профиля ствола скважины: набора, стабилизации, уменьшения зенитного угла, при отсутствии промывки и нагрузки на долото. На фиг.13 изображена схема первого замера для участков профиля ствола скважины: набора, стабилизации, уменьшения зенитного угла, при отсутствии нагрузки на долото, вид сверху. На фиг.14 изображена схема второго замера для участков профиля ствола скважины: набора, стабилизации, уменьшения зенитного угла, при промывке и работе забойного двигателя и отсутствии нагрузки на долото. На фиг.15 изображена схема второго замера для участков профиля ствола скважины: набора, стабилизации, уменьшения зенитного угла, и показано изменение угла закручивания бурильной колонны при промывке и работе забойного двигателя и отсутствии нагрузки на долото, вид сверху. На фиг.16 изображена схема третьего замера для участков профиля ствола скважины: набора, стабилизации, уменьшения зенитного угла, при промывке и работе забойного двигателя и создании первичной нагрузки на долото. На фиг.17 изображена схема третьего замера для участков профиля ствола скважины: набора, стабилизации, уменьшения зенитного угла, при промывке и работе забойного двигателя и создании первичной нагрузки на долото, вид сверху. На фиг.18 изображена схема четвертого замера для участков профиля ствола скважины: набора, стабилизации, уменьшения зенитного угла, при промывке и работе забойного двигателя и создании вторичной нагрузки на долото. На фиг.19 изображена схема четвертого замера для участков профиля ствола скважины: набора, стабилизации, уменьшения зенитного угла, при промывке и работе забойного двигателя и создании вторичной нагрузки на долото, вид сверху. На фиг.20 изображена схема оптимизации параметров режима бурения для участков профиля ствола скважины: набора, стабилизации, уменьшения зенитного угла, при создании оптимальной нагрузки на долото. На фиг.21 изображена схема оптимизации параметров режима бурения для участков профиля ствола скважины: набора, стабилизации, уменьшения зенитного угла, при создании оптимальной нагрузки на долото, вид сверху. На фиг.22 изображена схема оптимизации параметров режима бурения для участков профиля ствола скважины: набора, стабилизации, уменьшения зенитного угла, при создании оптимальной нагрузки на долото с целью достижения проектного азимута после поворота бурильной колонны, вид сверху.
На вышеперечисленных схемах: 1 - долото, 2 - забой скважины, 3 - бурильная колонна, 4 - промывка и работа забойного двигателя, 5 - забойный двигатель.
Пример осуществления изобретения 1. Участок вертикальный
На Курьинском месторождении был выполнен следующий опыт при помощи забойной навигационной телесистемы «Печора-2».
На глубине 700 метров (забой скважины) после наращивания очередной бурильной трубы без промывки допустили бурильную колонну 3 до глубины 699 метров, на расстояние 1 метр до забоя 2, произвели первый замер. Осевая нагрузка на долото 1 Р1=0 Н по показаниям датчика веса станции контроля процесса бурения, промывка и работа 4 забойного двигателя 5 отсутствует, с помощью забойной навигационной телесистемы измеряют изображенный на фиг.1 и фиг.2 начальный азимут установки отклонителя А1, который был равен 360°.
Для выполнения второго замера, изображенного схематично на фиг.3 и фиг.4, дали команду бурильщику на запуск бурового насоса и при производительности 40 литров в секунду запустили забойный двигатель 5. Измерили посредством забойной навигационной телесистемы «Печора-2» азимут установки отклонителя А2 при промывке и работе 4 забойного двигателя 5 без создания нагрузки на долото 1, Р2=0 Н (по показаниям датчика веса станции контроля процесса бурения), который составил А2=335±0°, где ±0° колебания азимута установки отклонителя. С исследовательской целью определяют угол закручивания бурильной колонны φ2 от действия боковой отклоняющей силы при работе и промывке 4 забойного двигателя 5, φ2=A1-А2=360°-335°=25°.
Для выполнения третьего замера, изображенного схематично на фиг.5 и фиг.6, необходимо, чтобы долото 1 находилось на забое скважины 2, промывка и работа 4 забойного двигателя 5 присутствует при производительности бурового насоса 40 литров в секунду, бурильщик выполняет постепенное, ступенчатое нагружение долота 1 (разгрузка бурильной колонны 3 на забой скважины 2), нагрузка на долото 1, Р3=100±20·103 Н, где ±20·103 Н колебания нагрузки на долото (по показаниям датчика веса станции контроля процесса бурения). Производят измерение забойной навигационной телесистемой «Печора-2» азимута установки отклонителя А3=215±20°, где ±20° колебания азимута установки отклонителя, рассчитывают угол закручивания бурильной колонны φ3=А2-А3=335°-215°=120°, по показаниям станции контроля процесса бурения определяют механическую скорость бурения V3=6 метров в час и реактивный крутящий момент на долоте Мр3=280±50 Н·м, где ±50 Н·м колебания реактивного крутящего момента на долоте, по показаниям датчика крутящего момента станции контроля процессов бурения.
Далее выполняют четвертый замер, изображенный схематично на фиг.7 и фиг.8: долото 1 находится на забое скважины 2, промывка и работа 4 забойного двигателя 5 присутствует при производительности бурового насоса 40 литров в секунду, бурильщик выполняет постепенное, ступенчатое нагружение долота 1 (разгрузка бурильной колонны 3 на забой скважины 2), осевая нагрузка на долото 1
P4=160±10·103 Н, где ±10·103 Н колебания нагрузки на долото (по показаниям датчика веса станции контроля процесса бурения), производят измерение забойной навигационной телесистемой «Печора-2» азимута установки отклонителя А4=185±10°, где ±10° колебания азимута установки отклонителя, рассчитывают угол закручивания бурильной колонны 3, φ4=А2-А4=335°-185°=150°, по показаниям станции контроля процесса бурения определяют механическую скорость бурения V4=8 метров в час и реактивный крутящий момент на долоте Мр4=250±20 Н·м, где ±20 Н·м колебания реактивного крутящего момента на долоте по показаниям датчика реактивного крутящего момента станции контроля процессов бурения.
Отрываемся от забоя скважины 2 и производим расхаживание бурильной колонны 3 (1 раз на длину наращенной трубки - 9,5 метров). При помощи забойной навигационной телесистемы «Печора-2» выполняем установку отклонителя по схеме оптимизации забойных параметров, изображенной на фиг.9, фиг.10 и фиг.11: осуществляем поворот бурильной колонны 3 по оптимальному азимуту установки отклонителя АУО=Ат+φo=Ат+φ4=90°+150°=240°, где Ат - требуемый проектный азимут, φо=φ4=150° - оптимальный угол закручивания бурильной колонны 3, при котором был достигнут максимум механической скорости, V4=8 метров в час при минимальных колебаниях нагрузки на долото ±10 кН, минимальных колебаниях угла закручивания бурильной колонны ±10° и при минимальных колебаниях реактивного крутящего момента на долоте ±20 Н·м, фиксируют ведущую трубу на поверхности и производят углубление скважины без изменения оптимальных параметров режима бурения (производительности бурового насоса, нагрузки на долото 1, Pv.max=P4=160·103 Н) с постоянным азимутом установки отклонителя АУО=240°.
Компоновка бурильной колонны с забойным двигателем на первом вертикальном участке, где среднее значение зенитного угла 2° состоит из: долото - диаметр 393,7 мм - МХ-1 (коэффициент в=0,1), калибратор лопастной спиральный 392,0 мм, забойный двигатель, диаметр наружный - 240 мм (частота вращения вала двигателя n=170 оборотов в минуту, так как n<420 оборотов в минуту, то А'=150, реактивный момент на валу данного забойного двигателя согласно его паспорту составляет Мзд=12·103 Н·м), угол перекоса 0°, калибратор лопастной спиральный - 392,0 мм, забойная навигационная телесистема «Печора-2», утяжеленные бурильные трубы, диаметр наружный 178 мм - 80 метров, стальные бурильные трубы - диаметр наружный 127 мм, диаметр внутренний 108,6 мм (вес 1 погонного метра бурильных труб в воздухе 300 Н, модуль упругости на сдвиг для данных бурильных труб Е=2·1010 Н/м2) - оставшаяся длина до устья скважины. Породы на данном интервале представлены в основном категории мягкой твердости к=3,3. Согласно опытным данным по данной площади коэффициент трения принимаем равным µ=0,1.
Так как у нас первый вертикальный участок, то фактическую забойную нагрузку на долото, доходящую до забоя скважины, и расчетный фактический реактивный крутящий момент на долоте для предупреждения аварий рассчитывают в следующей последовательности, рассчитывают полярный момент инерции сечения бурильной колонны

рассчитывают удельный момент на долоте,

далее рассчитывают критическую длину бурильной колонны Lкр по формуле

так как фактическая длина деформированной бурильной колонны L=700 метров меньше критической длины деформированной бурильной колонны Lкр=18399 метров, (700<18399), то в формуле (3) вместо критической длины деформированной бурильной колонны Lкр необходимо использовать фактическую длину деформированной бурильной колонны L и рассчитывают момент силы сопротивления вращению на первом вертикальном участке Мc1, по следующей формуле

подставляя значения I, Муд, L, φо (в радианах), Mc1 в формулу (5), рассчитывают фактическую забойную нагрузку Рф на долото, доходящую до забоя скважины на первом вертикальном участке профиля ствола скважины:

подставляя вычисленные значения Муд, Рф, расчетный фактический реактивный крутящий момент на долоте вычислим по формуле (8)

где Рф - расчетная фактическая нагрузка на долото, доходящая до забоя скважины, Н;
Рi - нагрузка на долото, измеряемая датчиком веса станции контроля процессов бурения, где i=3, 4,…, n, Н;
Vi - механическая скорость бурения по показаниям датчика станции контроля процессов бурения (i=3, 4,…, n), м/ч;
φi - угол закручивания бурильной колонны, где i=3, 4,…, n, рассчитывается по показаниям забойной навигационной телесистемы, град;
φo - оптимальный угол закручивания бурильной колонны, при котором был достигнут максимум механической скорости, при минимальных колебаниях нагрузки на долото, минимальных колебаниях угла закручивания бурильной колонны и при минимальных колебаниях крутящего момента, град;
Е - модуль упругости второго рода, модуль Юнга, Па;
I - полярный момент инерции сечения бурильной колонны, м4;
Lкр - критическая длина деформированной бурильной колонны, м;
L - длина скважины по стволу, м;
Муд - удельный момент на долоте, Н·м/Н;
Mci - момент силы сопротивления вращению бурильной колонны на первом и втором вертикальном участке профиля ствола скважины, где i=1 или 2, Н·м;
 - расчетный фактический активный крутящий момент сопротивления вращению долота, Н·м;
- расчетный фактический активный крутящий момент сопротивления вращению долота, Н·м;
Мзд - реактивный момент на валу забойного двигателя (паспортная характеристика), Н·м;
 - расчетный фактический реактивный крутящий момент на долоте, Н·м;
- расчетный фактический реактивный крутящий момент на долоте, Н·м;
Mp - реактивный крутящий момент на долоте по показаниям датчика реактивного крутящего момента станции контроля процессов бурения, Н·м;
А2 - азимут установки отклонителя до начала бурения, после подачи бурового раствора, запуска забойного двигателя, измеренный забойной навигационной телесистемой, град;
АУО - оптимальный азимут установки отклонителя после подачи бурильной колонны на забой и создания осевой нагрузки на долото Рi, при котором был достигнут максимум механической скорости, при минимальных колебаниях нагрузки на долото, минимальных колебаниях угла закручивания бурильной колонны и при минимальных колебаниях крутящего момента, град;
Аi - азимут установки отклонителя, измеряемый забойной навигационной телесистемой, при i-м замере, где i=3, 4,…, n, град;
Aт - требуемый проектный азимут, град;
 - среднее значение зенитного угла на рассматриваемом интервале, град;
- среднее значение зенитного угла на рассматриваемом интервале, град;
в - коэффициент, зависящий от диаметра долота;
к - коэффициент, зависящий от породы;
n - частота вращения долота, об/мин;
А' - коэффициент, зависящий от частоты вращения долота;
Dд - диаметр долота, м;
DБТ - внешний диаметр бурильных труб, м;
dБТ - внутренний диаметр бурильных труб, м;
g - ускорение свободного падения, м/с2;
q - вес 1 погонного метра бурильных труб в воздухе, Н;
π - число Пи, приблизительно равное 3,141592;
µ - коэффициент трения согласно опытным данным по данной площади.
2. Участок набора зенитного угла
На Курьинском месторождении был выполнен следующий опыт при помощи забойной навигационной телесистемы «Печора-2».
На глубине 1219 метров (забой скважины) после наращивания очередной бурильной трубы без промывки допустили бурильную колонну 3 до глубины 1218 метров, на расстояние 1 метр до забоя 2, произвели первый замер. Осевая нагрузка на долото 1, Р1=0 Н (по показаниям станции контроля процесса бурения), промывка и работа 4 забойного двигателя 5 отсутствует, с помощью забойной навигационной телесистемы измеряют изображенный на фиг.12 и фиг.13 начальный азимут установки отклонителя A1, который был равен 360°.
Для выполнения второго замера, изображенного схематично на фиг.14 и фиг.15, дали команду бурильщику на запуск насоса и при производительности 40 литров в секунду запустили забойный двигатель 5. Измерили посредством забойной навигационной телесистемы «Печора-2» азимут установки отклонителя А2 при промывке и работе 4 забойного двигателя 5 без создания нагрузки на долото 1, Р2=0 Н, который составил А2=341±0°, где ±0° колебания азимута установки отклонителя. С исследовательской целью определяют угол закручивания бурильной колонны φ2 от действия боковой отклоняющей силы при работе и промывке 4 забойного двигателя 5, φ2=А1-А2=360°-341°=19°.
Для выполнения третьего замера, изображенного схематично на фиг.16 и фиг.17, необходимо, чтобы долото 1 находилось на забое скважины 2, промывка и работа 4 забойного двигателя 5 присутствует при производительности бурового насоса 40 литров в секунду, бурильщик выполняет постепенное, ступенчатое нагружение долота 1 (разгрузка бурильной колонны 3 на забой скважины 2), нагрузка на долото 1 Р3=150±25·103 Н, где ±25·103 Н колебания нагрузки на долото (по показаниям датчика веса станции контроля процесса бурения). Производят измерение забойной навигационной телесистемой «Печора-2» азимута установки отклонителя А3=296±25°, где ±25° колебания азимута установки отклонителя, рассчитывают угол закручивания бурильной колонны φ3=А2-А3=341°-296°=45°, по показаниям станции контроля процесса бурения определяют механическую скорость бурения V3=5,47 метров в час и реактивный крутящий момент на долоте Мр3=350±80 Н·м, где ±80 Н·м колебания реактивного крутящего момента на долоте по показаниям датчика реактивного крутящего момента станции контроля процессов бурения.
Далее выполняют четвертый замер изображенный схематично на фиг.18 и фиг.19, долото 1 находится на забое скважины 2, промывка и работа 4 забойного двигателя 5 присутствует при производительности бурового насоса 40 литров в секунду, бурильщик выполняет постепенное, ступенчатое нагружение долота 1 (разгрузка бурильной колонны 3 на забой скважины 2), осевая нагрузка на долото 1
P4=190±15·103 Н, где ±15·103 Н колебания нагрузки на долото (по показаниям датчика веса станции контроля процесса бурения), производят измерение забойной навигационной телесистемой «Печора-2» азимута установки отклонителя А4=280±7°, где ±7° колебания азимута установки отклонителя, рассчитывают угол закручивания бурильной колонны 3, φ4=А2-А4=341°-280°=61°, по показаниям станции контроля процесса бурения определяют механическую скорость бурения V4=6,13 метров в час и реактивный крутящий момент на долоте Мр4=380±40 Н·м, где ±40 Н·м колебания реактивного крутящего момента на долоте по показаниям датчика реактивного крутящего момента станции контроля процессов бурения.
Отрываемся от забоя скважины 2 и производим расхаживание бурильной колонны 3 (1 раз на длину наращенной трубки - 9,5 метров). При помощи забойной навигационной телесистемы «Печора-2» выполняем установку отклонителя по схеме оптимизации забойных параметров, изображенной на фиг.20, фиг.21 и фиг.22: осуществляем поворот бурильной колонны 3 по оптимальному азимуту установки отклонителя АУО=Ап+φо=Aп+φ4=90°+61°=151°, где Aп - требуемый проектный азимут, φо=φ4=61° - оптимальный угол закручивания бурильной колонны 3, при котором был достигнут максимум механической скорости, V4=6,13 метров в час, при минимальных колебаниях нагрузки на долото ±15·103 Н, минимальных колебаниях угла закручивания бурильной колонны ±7° и при минимальных колебаниях реактивного крутящего момента на долоте ±40 Н·м, фиксируют ведущую трубу на поверхности и производят углубление скважины без изменения оптимальных параметров режима бурения (подача бурового раствора, нагрузки на долото 1, Pv.max=P4=190·103 Н) с постоянным азимутом установки отклонителя АУО=151°.
Компоновка бурильной колонны с забойным двигателем на участке набора зенитного угла от 0° до 25°, азимута с 60° до 80°, в интервале 969-1219 метров, состоит из: долото - диаметр 393,7 мм - МХ-1 (коэффициент в=0,1), калибратор лопастной спиральный 392,0 мм, забойный двигатель, диаметр наружный - 240 мм (частота вращения вала двигателя n=170 оборотов в минуту, так как n<420 оборотов в минуту, то А'=150, реактивный момент на валу данного забойного двигателя согласно его паспорт Мзд=12·103 Н·м), угол перекоса 1°30', калибратор лопастной спиральный - 304,2 мм, забойная навигационная телесистема «Печора-2», утяжеленные бурильные трубы, диаметр наружный 178 мм - 80 метров, стальные бурильные трубы - диаметр наружный 127 мм (модуль упругости на сдвиг для данных бурильных труб Е=2·1010 Н/м2) - оставшаяся длинна до устья скважины. Породы на данном интервале представлены в основном категории средней твердости к=3,0. Согласно опытным данным по данной площади коэффициент трения принимаем равным µ=0,3.
Так как у нас участок набора зенитного угла (интенсивность приращения зенитного угла больше 0), то расчетную фактическую забойную нагрузку Рф на долото, доходящую до забоя скважины, и расчетный фактический реактивный крутящий момент на долоте рассчитывают в следующей последовательности: рассчитывают полярный момент инерции сечения бурильной колонны

рассчитывают удельный момент на долоте

рассчитывают угол охвата

подставляя вычисленные значения I, γ в формулу (6), рассчитывают фактическую забойную нагрузку Рф на долото, доходящую до забоя скважины на участке набора зенитного угла профиля ствола скважины:
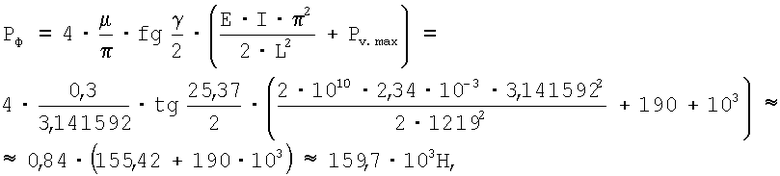
подставляя вычисленные значения Муд, Рф, расчетный фактический реактивный крутящий момент на долоте вычислим по формуле (8)

где Рф - расчетная фактическая нагрузка на долото, доходящая до забоя скважины, Н;
Pv.max - нагрузка на долото, измеряемая датчиком веса станции контроля процесса бурения, при которой был достигнут максимум механической скорости, при минимальных колебаниях нагрузки на долото, минимальных колебаниях угла закручивания бурильной колонны и при минимальных колебаниях крутящего момента в результате эксперимента, Н;
Е - модуль упругости второго рода, модуль Юнга, Па;
I - полярный момент инерции, м4;
L - длина скважины по стволу, м;
Муд - удельный момент на долоте, Н·м/Н;
- расчетный фактический активный крутящий момент сопротивления вращению долота, Н·м;
Мзд - реактивный момент на валу забойного двигателя (паспортная характеристика), Н·м;
- расчетный фактический реактивный крутящий момент на долоте, Н·м;
Мр - реактивный крутящий момент на долоте по показаниям датчика реактивного крутящего момента станции контроля процессов бурения, Н·м;
А2 - азимут установки отклонителя до начала бурения после подачи бурового раствора, запуска забойного двигателя, радиан, измеренный забойной навигационной телесистемой;
АУО - оптимальный азимут установки отклонителя после подачи бурильной колонны на забой и создания осевой нагрузки на долото Рi (i=3, 4,…, n), при котором был достигнут максимум механической скорости, при минимальных колебаниях нагрузки на долото, минимальных колебаниях угла закручивания бурильной колонны и при минимальных колебаниях крутящего момента, град;
- среднее значение зенитного угла на рассматриваемом интервале, град;
в - коэффициент, зависящий от диаметра долота;
к - коэффициент, зависящий от породы;
n - частота вращения долота, об/мин;
A' - коэффициент, зависящий от частоты вращения долота;
Dд - диаметр долота, м;
g - ускорение свободного падения, м/с2;
q - вес 1 погонного метра бурильных труб в воздухе, Н;
γ - угол охвата, град;
Δα - приращение зенитного угла, град;
Δβ - приращение азимутального угла, град;
π - число Пи, приблизительно равное 3,141592;
µ - коэффициент трения согласно опытным данным по данной площади.
Технический результат, который получили при реализации изобретения при конкретном исполнении, заключается в том, что предупредили критические (аварийные) состояния бурильной колонны, оптимизировав процесс бурения по минимальным колебаниям азимута установки отклонителя, минимальным колебаниям нагрузки на долото, измеренной датчиком веса станции контроля процессов бурения, и максимуму механической, рейсовой скорости, проходки на долото, получили наглядную и достоверную забойную информацию о положении угла закручивания бурильной колонны 3, о фактической забойной нагрузке на долото, доходящей до забоя скважины, о фактическом реактивном (активном) крутящем моменте, с упрощенным технологическим обслуживанием, который позволил оперативно, с меньшими трудозатратами контролировать и управлять бурением в заданном направлении, предотвращая критические (аварийные) состояния бурильной колонны.
Изобретение относится к бурению направленных и глубоких скважин с использованием забойных навигационных телесистем (ЗНТ). Техническим результатом изобретения является упрощение технологической оснастки, обеспечивающей передачу забойной информации, уменьшение трудоемкости измерений, аварийности работ, повышение их качества, надежности и расширение области применения. Способ включает использование ЗНТ, наземные системы контроля параметров режима бурения, измерение на забое зенитного угла, азимута ствола и установки отклонителя. При этом при первом замере без промывки скважины производят измерение ЗНТ азимута установки отклонителя А1. Во втором замере при промывке и работе забойного двигателя без создания нагрузки на долото производят измерение ЗНТ азимута установки отклонителя А2. В следующих замерах при создании нагрузки на долото, измеряемой датчиком веса станции контроля процессов бурения (СКПБ), Рi, где i=3, 4,…, n, производят измерение ЗНТ азимута установки отклонителя Аi, где i=3, 4,…, n. Затем по показаниям СКПБ определяют механическую скорость Vi (i=3, 4,…, n), а по показаниям датчика реактивного крутящего момента СКПБ определяют реактивный крутящий момент на долоте и рассчитывают угол закручивания бурильной колонны (БК) как разность измеренных значений азимута установки отклонителя φ2=A1-A2 на забое, где i=2, 3, 4,…, n, с использованием ЗНТ, измерение которого зависит от бокового момента, вызванного действием отклоняющей силы на долоте при промывке и работе забойного двигателя. Затем при последующих замерах ЗНТ азимута установки отклонителя Аi, при нагрузке на долото Рi (i=3, 4,…, n), измеренной на поверхности, определяют угол закручивания БК φi=А2-Аi (i=3, 4,…,n). После чего рассчитывают оптимальный угол закручивания БК φo=А2-Аi (i=3, или 4, или … или n), соответствующий критериям оптимизации режима бурения. Далее определяют оптимизированный азимут установки отклонителя Ауо=Ат+φo, где Aт - требуемый проектный азимут, φo - оптимальный угол закручивания БК, при котором достигается максимум механической скорости, устанавливают по нему отклонитель и обнаруживают критические состояния процесса бурения по максимальным колебаниям значений азимута установки отклонителя АУО и величине угла закручивания БК φi (i=2, 3, 4,…, n). Вышеперечисленные операции повторяются после остановки процесса бурения, промывки скважины, после бурения очередного интервала, расхаживания БК и наращивания бурильной трубы. 22 ил.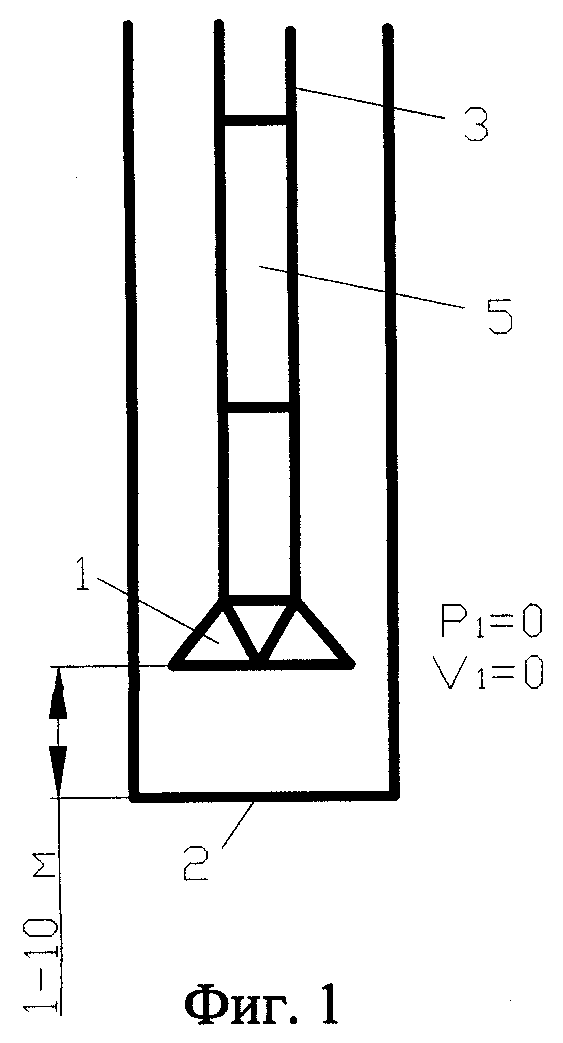
Способ контроля и управления забойными параметрами режима бурения, включающий использование забойной навигационной системы, наземные системы контроля параметров режима бурения, измерение на забое зенитного угла, азимута ствола и установки отклонителя, отличающийся тем, что при первом замере без промывки скважины производят измерение забойной навигационной телесистемой азимута установки отклонителя A1, далее во втором замере при промывке и работе забойного двигателя без создания нагрузки на долото производят измерение забойной навигационной телесистемой азимута установки отклонителя А2 и далее в следующих замерах при создании нагрузки на долото, измеряемой датчиком веса станции контроля процессов бурения Рi, где i=3, 4,…,n, производят измерение забойной навигационной телесистемой азимута установки отклонителя Аi, где i=3, 4,…,n, затем по показаниям станции контроля процессов бурения определяют механическую скорость Vi (i=3, 4,…,n), a по показаниям датчика реактивного крутящего момента станции контроля процессов бурения определяют реактивный крутящий момент на долоте и рассчитывают угол закручивания бурильной колонны как разность измеренных значений азимута установки отклонителя φ2=A1-A2 на забое, где i=2, 3, 4,…, n, с использованием забойной навигационной телесистемы, измерение которого зависит от бокового момента, вызванного действием отклоняющей силы на долоте при промывке и работе забойного двигателя, затем при последующих замерах забойной навигационной телесистемой азимута установки отклонителя Аi, при нагрузке на долото Pi (i=3, 4,…, n), измеренной на поверхности, определяют угол закручивания бурильной колонны φi=А2-Аi (i=3, 4,…,n), после чего рассчитывают оптимальный угол закручивания бурильной колонны φо=А2-Аi (i=3 или 4 или … или n), соответствующий критериям оптимизации режима бурения, далее определяют оптимизированный азимут установки отклонителя АУО=Ат+φо, где Aт - требуемый проектный азимут, φо - оптимальный угол закручивания бурильной колонны, при котором достигается максимум механической скорости, устанавливают по нему отклонитель и обнаруживают критические состояния процесса бурения по максимальным колебаниям значений азимута установки отклонителя АУО и величине угла закручивания бурильной колонны φi(i=2, 3, 4,…, n), вышеперечисленные операции повторяются после остановки процесса бурения, промывки скважины, после бурения очередного интервала, расхаживания бурильной колонны и наращивания бурильной трубы.
| СПОСОБ НЕПРЕРЫВНОГО КОНТРОЛЯ ЗА НАПРАВЛЕНИЕМ ДЕЙСТВИЯ ОТКЛОНИТЕЛЯ, ИЗМЕРЕНИЯ ЗЕНИТНЫХ И АЗИМУТАЛЬНЫХ УГЛОВ СКВАЖИН И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2263782C2 |
| Способ управления процессом бурения иуСТРОйСТВО для ЕгО ОСущЕСТВлЕНия | 1979 |
|
SU827759A1 |
| Самоориентирующийся забойный отклонитель | 1981 |
|
SU985235A1 |
| Устройство для контроля параметров процесса бурения | 1986 |
|
SU1461882A1 |
| Система геомагнитного азимутального кругового обзора для ориентации устройств направленного бурения | 1989 |
|
SU1668652A1 |
| УСТРОЙСТВО ДЛЯ ЗАМЕРА АЗИМУТА СКВАЖИНЫ | 1990 |
|
RU2013535C1 |
| ВЕТРОАГРЕГАТ | 1993 |
|
RU2078992C1 |
| СПОСОБ КОНТРОЛЯ ТРАЕКТОРИИ БУРЕНИЯ СКВАЖИНЫ | 1997 |
|
RU2135765C1 |
| СИСТЕМА УПРАВЛЕНИЯ ТРАЕКТОРИЕЙ СКВАЖИНЫ В ПРОЦЕССЕ БУРЕНИЯ | 1999 |
|
RU2161701C2 |
| RU 94035988 A1, 27.07.1996 | |||
| СИСТЕМА УПРАВЛЕНИЯ ПРОЦЕССОМ БУРЕНИЯ | 2001 |
|
RU2208153C2 |
| СПОСОБ БУРЕНИЯ НАКЛОННЫХ И ГОРИЗОНТАЛЬНЫХ СКВАЖИН | 2001 |
|
RU2235179C2 |
| US 4582147 A, 15.04.1986 | |||
| GB 20043747 A, 08.10.1980. | |||

