Изобретение относится к нефтегазодобывающей промышленности, а именно к буровой технике и предназначено для контроля положения ствола горизонтальной скважины между кровлей и подошвой пласта – коллектора.
Устройство для контроля положения ствола горизонтальной скважины (патент RU№ 2362012, МПК Е21В 47/02, G01V03/30, опубл. 20.07.2009 Бюл. № 20), содержащее установленные в непосредственной близости от долота датчики гамма-каротажа (ГК), ориентированные под углом 180° друг к другу, и феррозонд, расположенный под углом 90° к диаметральной оси датчиков ГК, причем указанные датчики ГК и феррозонд расположены в отдельном измерительном наддолотном модуле с беспроводным электромагнитным каналом связи и снабжены электронной схемой согласования сигналов феррозонда с импульсами датчиков ГК, содержащей блок управления, коммутатор переключения импульсов датчиков ГК, счетчики импульсов ГК, а также суммарный счетчик импульсов ГК, при этом выход измерительной обмотки феррозонда подключен к входу блока управления, определяющего полярность выходного сигнала феррозонда и связанного с коммутатором, обеспечивающим переключение каналов прохождения импульсов счетчиков ГК в зависимости от полярности выходного сигнала феррозонда, в соответствующие счетчики импульсов ГК, обозначенные как ГК - «верх» или ГК - «низ», выходы которых соединены с суммарным счетчиком импульсов ГК - «сумма», соединенным с измерительной схемой наддолотного модуля.
Недостатками данного устройства являются сложность изготовления и настройки из-за наличия дополнительного модуля (феррозонда) и низкая точность измерения из-за вращения модулей (гамма-каротаж эффективен при исследовании нескольких последовательных импульсов излучаемых и получаемых в одном положении датчиков и соответствующих приемников).
Устройство для контроля положения ствола горизонтальной скважины(патент RU № 2490448, МПК Е21В 47/022, G01V 05/12, опубл. 20.08.2013 Бюл. № 23), содержащее установленные в кожухе телесистемы основной и направленный блоки датчиков гамма-каротажа, направленный блок датчиков гамма-каротажа помещен в свинцовый корпус с окном для регистрации направленного гамма-излучения, которое физически соотнесено к положению отклонителя, блоки датчиков гамма-каротажа расположены в измерительном гамма-модуле с проводным каналом связи с блоком телесистемы и снабжены электронной схемой согласования сигналов телесистемы с импульсами датчиков гамма-каротажа, содержащей блок управления, коммутатор переключения подачи питания на блоки датчиков гамма-каротажа, источник постоянного тока, высоковольтные источники питания, счетчики импульсов гамма-каротажа, микропроцессор, при этом выход сигналов телесистемы подключен к входу блока управления, определяющего вид выходного сигнала телесистемы и связанного с коммутатором, обеспечивающим переключение подачи питания на один из блоков датчиков гамма-каротажа в зависимости от вида выходного сигнала телесистемы.
Недостатками данного устройства являются сложность реализации из-за необходимости остановки бурения для определения ориентации сигналов и низкая точность измерения из-за смещения модулей во время бурения (гамма-каротаж эффективен при исследовании нескольких последовательных импульсов излучаемых и получаемых в одном положении датчиков и соответствующих приемников).
Технической задачей предлагаемого изобретения является создание устройства для контроля положения ствола горизонтальной скважины при бурении, позволяющего просто, стабильно и точно определять расположение кровли и подошвы пласта при бурении.
Техническая задача решается устройством для контроля положения ствола горизонтальной скважины при бурении, включающий установленные в кожухе телесистемы два блока датчиков гамма-каротажа, один из которых выполнен направленным, блоки датчиков гамма-каротажа расположены в измерительном гамма-модуле с каналом связи с блоком телесистемы и снабжены электронной схемой согласования сигналов телесистемы с импульсами датчиков гамма-каротажа, содержащей блок управления, коммутатор переключения подачи питания на блоки датчиков гамма-каротажа, источник постоянного тока, высоковольтные источники питания, счетчики импульсов гамма-каротажа, микропроцессор, выход сигналов телесистемы подключен к входу блока управления, определяющего вид выходного сигнала телесистемы и связанного с коммутатором, обеспечивающим переключение подачи питания на один из блоков датчиков гамма-каротажа в зависимости от вида выходного сигнала телесистемы, при этом силовой выход телесистемы соединен с системой управления отклонителя режущей головки с забойным двигателем.
Новым является то, что датчики выполнены направленными и расположены соответственно сверху и снизу диаметрально противоположно в кожухе телесистемы, установленного с возможностью вращения относительно статора забойного двигателя и оснащенного со стороны нижнего датчика утяжелителем для ориентации кожуха под действием гравитации, при этом отклонитель изготовлен в виде первого и второго расположенных на расстоянии 28 – 36 м жестко зафиксированных центраторов с расположенными между ними подвижным в продольном направлении центратором, причем первый из жестко зафиксированных центраторов установлен на статоре в непосредственной близости от ротора, вращающего режущую головку, система управления выполнена в виде цилиндрического корпуса зафиксированного между первым и вторым центраторами с реверсивными электродвигателями расположенными равномерно по периметру, продольные роторы которых выполнены полыми с внутренней резьбой для синхронного перемещения резьбовых толкателей, жестко соединенных с подвижным центратором для перемещения в диапазоне ± 1 – 2 м от начального положения, причем электродвигатели через таймер времени соединены с телесистемой для получения управляющих сигналов, при этом начальное положение всех центраторов подбирают для горизонтального бурения.
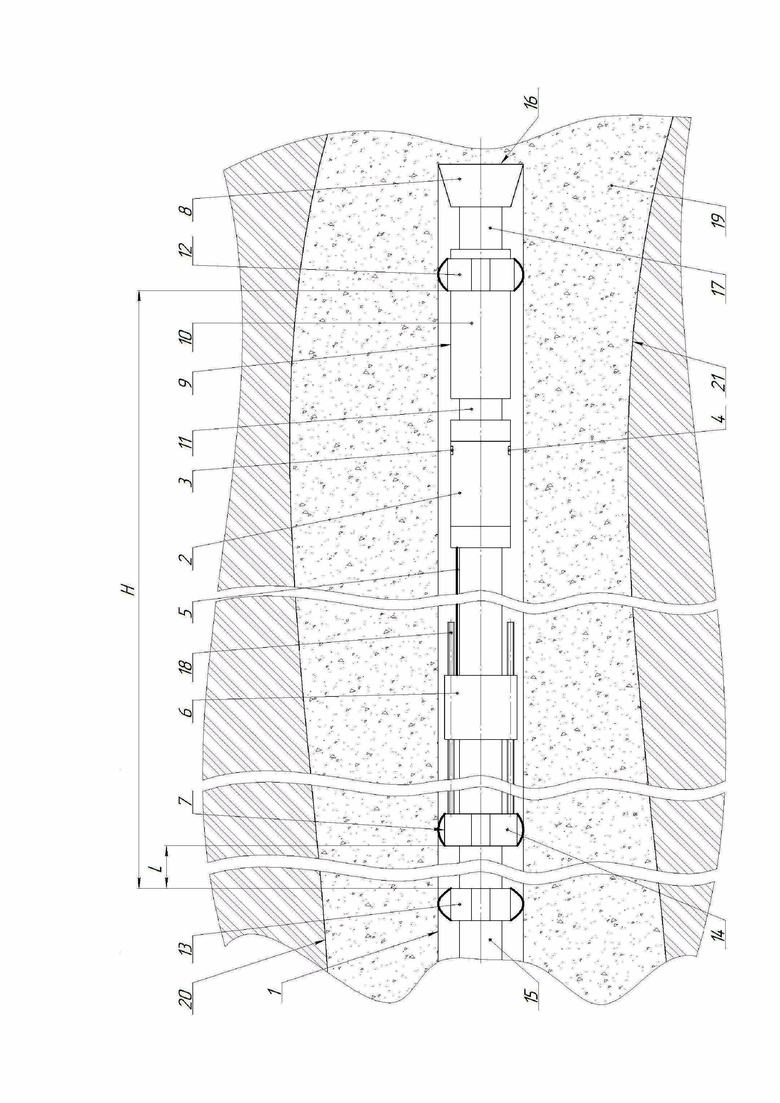
На чертеже изображена схема установки устройства при бурении горизонтального ствола.
Устройство для контроля положения ствола 1 горизонтальной скважины при бурении включает установленные в кожухе 2 телесистемы два блока датчиков гамма-каротажа: верхний 3 и нижний 4, измерительный гамма-модуль с каналом связи с блоком телесистемы с электронной схемой согласования сигналов телесистемы с импульсами датчиков гамма-каротажа, содержащей блок управления, коммутатор переключения подачи питания на блоки датчиков гамма-каротажа, источник постоянного тока, высоковольтные источники питания, счетчики импульсов гамма-каротажа, микропроцессор (не показаны).Выход сигналов телесистемы подключен к входу блока управления, определяющего вид выходного сигнала телесистемы и связанного с коммутатором, обеспечивающим переключение подачи питания на один из блоков датчиков гамма-каротажа в зависимости от вида выходного сигнала телесистемы. При этом силовой выход телесистемыиз кожуха 2 соединен кабелем 5 с системой управления 6отклонителя 7 режущей головки 8 (долото, коронка или т.п.) с забойным двигателем 9 (винтовые, турбинные, турбинно-винтовые или т.п. забойные двигатели) для увеличения (направления вверх ствола 1) или уменьшения (направления вниз ствола 1) зенитного угла (не показан). Причем блоки датчиков 3 и 4 выполнены направленными и расположены соответственно сверху и снизу диаметрально противоположно в кожухе 2 телесистемы, установленного с возможностью вращения относительно статора 10 забойного двигателя 9 и оснащенного со стороны нижнего датчика утяжелителем (не показан) для постоянной соответствующей ориентации блоков датчиков 3 и 4 кожуха 2 под действием гравитации. Утяжелитель может быть выполнен в виде утяжеляющей вставки (свинец, твердый сплав и т.д.) снизу кожуха 2, оставляется слой металла при обработке кожуха 2 снизу или т.п. Для вращения относительно статора 10 двигателя 9 кожух 2 на концах оснащается внутри подшипниками (качения или скольжения – не показаны) напрессовываемыми внутренними обоймами (не показаны) на статор 10 или бурильную трубу 11 у статора 10.
Известные управляемые системы отклонения (см., например, https://studref.com/454048/tehnika/otkloniteli_nepreryvnogo_deystviya_baze_zaboynyh_dvigateley) громоздки, сложны в применении и требуют большое количество энергии для отклонения и фиксации под выбранным углом, при этом невозможно получить точно выбранное направление вверх или вниз. Поэтому авторами разработан автоматизированный отклонитель 7 собственной конструкции. Известно, что можно добиться направленного бурения вверх или вниз при помощи гравитационных сил, действующих на бурильную компоновку, за счет изменения расстояния между центраторами 12, 13 и 14 бурильной колонны 15. Наибольший эффект по отклонению вверх или вниз дает расположение центраторов 12, 13 и 14 в пределах 36 метров от забоя 16 горизонтального ствола 1 скважины, а расположением среднего центратора 14 регулировать отклонение ствола (чем дальше от забоя 16, тем больше зенитный угол). Для этого отклонитель 7 изготовлен в виде первого 12 и второго 13 расположенных на расстоянии Н = 28 – 36 м жестко зафиксированных центраторов с расположенными между ними подвижным в продольном направлении центратором 14.Первый из жестко зафиксированных центраторов 12 установлен на статоре 10 двигателя 9 в непосредственной близости от ротора 17, вращающего режущую головку 8.Система управления 6 отклонителем 7 выполнена в виде цилиндрического корпуса зафиксированного между первым 12 и вторым 13 центраторами с реверсивными электродвигателями (не показаны) расположенными равномерно по периметру, продольные роторы (не показаны) которых выполнены полыми с внутренней резьбой для синхронного перемещения резьбовых продольных толкателей 18, жестко соединенных с подвижным центратором 14 для его перемещения в диапазоне ± 1 – 2 м (чем более сложный профиль скважины, тем на большее расстояние нужно перемещать центратор 14) от начального положения, причем электродвигатели через таймер времени (не показан) соединены с телесистемой для получения управляющих сигналов. Начальное положение же всех центраторов 12, 13 и 14 подбирают для горизонтального бурения ствола 1.Центраторы 12 и 13 на расстоянии Н друг от друга, центратор 14 на расстоянии L от второго центратора 13. Для проходки горизонтальный стволов 1 на месторождениях Республики Татарстан (РТ) принимают L = 8 – 12 м (точно определяется эмпирическим путем) для горизонтального бурения, когда зенитный угол равен 90º.
На схемы отдельных блоков и виды их соединения между собой авторы не претендуют, так как используются известные блоки и соединения (например, производства фирм ООО "ЛНК" г. Пермь, ООО "фирма "Геосканер" г. Краснодар или т.п.).
Для реверсивных электродвигателей системы управления 6 рекомендуется использовать пьезоэлектрические двигатели, имеющие высокий крутящий момент при небольшой скорости вращения, что не требует использования дополнительного понижающего редуктора, упрощая конструкцию системы управления 6. Обычно используют 2 – 4 шт электродвигателей: чем больше диаметр, тем больше штук.
Для подвижного ценратора 14 рекомендуется использование установленной с возможностью вращения наружной центрирующей части (не показана) для исключения тангенциальных нагрузок на толкатели 18, значительно снижая вероятность аварийных ситуаций из-за искривления толкателей 18.
Для исключения скручивания кабеля 5 рекомендуется использовать скользящее соединение по периметру соединение кабеля с кожухом 2 и далее с силовым выходом. Авторы на это не претендуют, так как такие соединения широко используются в электродвигателях.
Конструктивные элементы и технологические соединения, не влияющие на работоспособность устройства, на чертеже не показаны.
Устройство работает следующим образом (на примере разработанного отклонителя 7).
После проходки скважины до горизонтального ствола 1. Бурильную компоновку (не показана) для получения большой кривизны и выхода на горизонтальный ствол 1 извлекают из скважины. И спускают разработанное устройство. Для этого к ротору 17 двигателя 9 присоединяют режущую головку 8 для углубления ствола 1 необходимого диаметра, на статоре 10 фиксируют первый центратор 12. К статору также прикрепляют (например, при помощи трубы 11) вращающийся герметичный кожух 2, утяжеленный снизу, телесистемы, содержащий верхний 3 и нижний 4блоки датчиков, измерительный гамма-модуль с каналом связи с блоком телесистемы с электронной схемой согласования сигналов телесистемы с импульсами датчиков гамма-каротажа, содержащей блок управления, коммутатор переключения подачи питания на блоки датчиков гамма-каротажа, источник постоянного тока, высоковольтные источники питания, счетчики импульсов гамма-каротажа, микропроцессор для обработки данных и блока управления для переключения подачи питания на один из блоков датчиков гамма-каротажа в зависимости от вида выходного сигнала телесистемы и формирования соответствующих сигналов силового выхода для системы управления 6 отклонителя 7 режущей головки 8 с забойным двигателем 9. На колонну бурильных труб 15 устанавливают блок управления 6, расположенный примерно посередине резьбовой части толкателей 18, и центратор 14 до размещения его в определённом заранее месте, после чего блок управления 6 фиксируют на колонне бурильных труб 15. Силовой выход телесистемы через кожух соединяют кабелем 5 с системой управления 6. Для формирования сигнала из силового выхода заранее определенной (эмпирическим путем) временной длины силовой выход может дополнительно оснащен таймером для продольного перемещения толкателями 18 подвижного центратора 14 на определённое расстояние (выбирается эмпирическим путем) после каждого сигнала. Потом на колонне бурильных труб 15 фиксируют второй центратор 13 на расстоянии Н от первого центратора 12, и L –от подвижного центратора 14.
После сборки устройство на колонне бурильных труб 15 спускают в скважину до предварительного забоя 16. Нагнетают жидкость по колонне бурильных труб 15, поток которой вращает ротор 17 двигателя 9 вместе с режущей головкой 8. Режущая головка, последовательно разрушая забой 16, увеличивает длину горизонтального ствола 1 скважины, а центраторы 12, 13 и 14 выдерживают горизонтальное положение ствола 1 в продуктивном пласте 19. За счет утяжелителя кожух 2 постоянно ориентирован так, что верхние блок датчиков 3 направлен вверх, а нижний 4 – вниз, не требуя проверки ориентации блоков датчиков 3 и 4 по направлению. При этом ведут постоянный (дискретный синхронизированный или поочередный) контроль показаний гамма фона верхнего 3 и нижнего 4блоков датчиков. Если верхний блок датчиков 3 показывает увеличение гамма фона, а нижний 4 – уменьшение, значит расстояние между стволом 1 (точкой замера) и кровлей 20 пласта 19 уменьшилось, а между стволом 1 и подошвой 21 - увеличилось, значит либо ствол 1 пошел на вверх, либо пласт 19 уходит вниз. Телеметрическая система в кожухе 2 формирует сигнал, который через силовой выход по кабелю 5 подается на блок управления 6 для синхронного вращения роторов электродвигателей, которые по резьбе перемещают толкатели 18 в сторону первого центратора 12, уменьшая зенитный угол ствола 1. Если верхний блок датчиков 3опять показывает увеличение гамма фона, а нижний 4 – уменьшение, то сигналы повторяются до стабилизации показаний верхнего 3 и нижнего 4 блоков датчиков на начальном уровне.
Если верхний блок датчиков 3 показывает уменьшение гамма фона, а нижний 4 – увеличение, значит расстояние между стволом 1 (точкой замера) и кровлей 20 пласта 19увеличилось, а между стволом 1 и подошвой 21 - уменьшилось, значит либо ствол 1 пошел на вниз, либо пласт 19 уходит вверх. Телеметрическая система в кожухе 2 формирует сигнал обратной полярности, который через силовой выход по кабелю 5 подается на блок управления 6 для синхронного вращения роторов электродвигателей, которые по резьбе перемещают толкатели 18 в сторону второго центратора 13, увеличивая зенитный угол ствола 1. Если верхний блок датчиков 3опять показывает уменьшение гамма фона, а нижний 4 – увеличение, то сигналы повторяются до стабилизации показаний верхнего 3 и нижнего 4 блоков датчиков на начальном уровне.
Шаг перемещения толкателей 18 при каждом сигнале для месторождений РТ составляет 0,15 – 0,2 м.
При этом не требуется никакой корректировки ствола 1 по азимуту (влево или вправо), так как гравитационные силы направлены строго по вертикали, что в целом упрощает устройство и делает его очень надежным. А регулировка направления ствола 1 производится в автоматическом режиме, полностью исключая человеческий фактор.
Предлагаемое устройство для контроля положения ствола горизонтальной скважины при бурении позволяет просто, стабильно и точно определять расположение кровли и подошвы пласта при бурении, регулируя направление ствола в автоматическом режиме.
Изобретение относится к нефтегазодобывающей промышленности, а именно к буровой технике, и предназначено для контроля положения ствола горизонтальной скважины между кровлей и подошвой пласта - коллектора. Устройство для контроля положения ствола горизонтальной скважины при бурении, включающий установленные в кожухе телесистемы два блока датчиков гамма-каротажа, один из которых выполнен направленным. Блоки датчиков гамма-каротажа расположены в измерительном гамма-модуле с каналом связи с блоком телесистемы и снабжены электронной схемой согласования сигналов телесистемы с импульсами датчиков гамма-каротажа, содержащей блок управления, коммутатор переключения подачи питания на блоки датчиков гамма-каротажа, источник постоянного тока, высоковольтные источники питания, счетчики импульсов гамма-каротажа, микропроцессор. При этом выход сигналов телесистемы подключен к входу блока управления, определяющего вид выходного сигнала телесистемы и связанного с коммутатором, обеспечивающим переключение подачи питания на один из блоков датчиков гамма-каротажа в зависимости от вида выходного сигнала телесистемы. Силовой выход телесистемы соединен с системой управления отклонителя режущей головки с забойным двигателем. Блоки датчиков выполнены направленными и расположены соответственно сверху и снизу диаметрально противоположно в кожухе телесистемы, установленного с возможностью вращения относительно статора забойного двигателя и оснащенного со стороны нижнего датчика утяжелителем для ориентации кожуха под действием гравитации. При этом отклонитель изготовлен в виде первого и второго расположенных на расстоянии 28-36 м жестко зафиксированных центраторов с расположенным между ними подвижным в продольном направлении центратором. Причем первый из жестко зафиксированных центраторов установлен на статоре в непосредственной близости от ротора, вращающего режущую головку. Система управления выполнена в виде цилиндрического корпуса, зафиксированного между первым и вторым центраторами с реверсивными электродвигателями, расположенными равномерно по периметру, продольные роторы которых выполнены полыми с внутренней резьбой для синхронного перемещения резьбовых толкателей, жестко соединенных с подвижным центратором для перемещения в диапазоне ± 1-2 м от начального положения. Электродвигатели через таймер времени соединены с телесистемой для получения управляющих сигналов. Начальное положение всех центраторов подбирают для горизонтального бурения. Предлагаемое устройство для контроля положения ствола горизонтальной скважины при бурении позволяет просто, стабильно и точно определять расположение кровли и подошвы пласта при бурении, регулируя направление ствола в автоматическом режиме. 1 ил.
Устройство для контроля положения ствола горизонтальной скважины при бурении, включающий установленные в кожухе телесистемы два блока датчиков гамма-каротажа, один из которых выполнен направленным, блоки датчиков гамма-каротажа расположены в измерительном гамма-модуле с каналом связи с блоком телесистемы и снабжены электронной схемой согласования сигналов телесистемы с импульсами датчиков гамма-каротажа, содержащей блок управления, коммутатор переключения подачи питания на блоки датчиков гамма-каротажа, источник постоянного тока, высоковольтные источники питания, счетчики импульсов гамма-каротажа, микропроцессор, при этом выход сигналов телесистемы подключен к входу блока управления, определяющего вид выходного сигнала телесистемы и связанного с коммутатором, обеспечивающим переключение подачи питания на один из блоков датчиков гамма-каротажа в зависимости от вида выходного сигнала телесистемы, при этом силовой выход телесистемы соединен с системой управления отклонителя режущей головки с забойным двигателем, отличающееся тем, что блоки датчиков выполнены направленными и расположены соответственно сверху и снизу диаметрально противоположно в кожухе телесистемы, установленного возможностью вращения относительно статора забойного двигателя и оснащенного со стороны нижнего датчика утяжелителем для ориентации кожуха под действием гравитации, при этом отклонитель изготовлен в виде первого и второго расположенных на расстоянии 28-36 м жестко зафиксированных центраторов с расположенным между ними подвижным в продольном направлении центратором, причем первый из жестко зафиксированных центраторов установлен на статоре в непосредственной близости от ротора, вращающего режущую головку, система управления выполнена в виде цилиндрического корпуса, зафиксированного между первым и вторым центраторами с реверсивными электродвигателями, расположенными равномерно по периметру, продольные роторы которых выполнены полыми с внутренней резьбой для синхронного перемещения резьбовых толкателей, жестко соединенных с подвижным центратором для перемещения в диапазоне ± 1-2 м от начального положения, причем электродвигатели через таймер времени соединены с телесистемой для получения управляющих сигналов, при этом начальное положение всех центраторов подбирают для горизонтального бурения.
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПОЛОЖЕНИЯ СТВОЛА ГОРИЗОНТАЛЬНОЙ СКВАЖИНЫ | 2012 |
|
RU2490448C1 |
| US 2018283156 A1, 04.10.2018 | |||
| Устройство для регулирования числа оборотов асинхронного двигателя | 1927 |
|
SU9968A1 |
| СПОСОБ БУРЕНИЯ СКВАЖИН И ОДНОВРЕМЕННОГО НАПРАВЛЕНИЯ БУРОВОГО ДОЛОТА АКТИВНО КОНТРОЛИРУЕМЫМ ВРАЩАТЕЛЬНЫМ НАПРАВЛЯЕМЫМ СКВАЖИННЫМ БУРОВЫМ УСТРОЙСТВОМ И ВРАЩАТЕЛЬНОЕ НАПРАВЛЯЕМОЕ СКВАЖИННОЕ БУРОВОЕ УСТРОЙСТВО | 1999 |
|
RU2229012C2 |
| СПОСОБ БУРЕНИЯ СКВАЖИНЫ И ОДНОВРЕМЕННОГО НАПРАВЛЕНИЯ БУРОВОЙ КОРОНКИ АКТИВНО УПРАВЛЯЕМОЙ ВРАЩАТЕЛЬНОЙ НАПРАВЛЯЕМОЙ БУРОВОЙ СИСТЕМОЙ И АКТИВНО УПРАВЛЯЕМАЯ ВРАЩАТЕЛЬНАЯ НАПРАВЛЯЕМАЯ СИСТЕМА | 1999 |
|
RU2239042C2 |
| WO 2001011180 A1, 15.02.2001 | |||
| US 6513606 B1, 04.02.2003. | |||

