Способ относится к системам сопровождения авиационно-космических объектов и может быть использован для определения точности наведения снаряда на цель и контроля конечных условий их сближения.
Известен комплексный способ определения точности наведения и сближения снаряда с целью по наблюдаемым параметрам их траекторного движения, заключающийся в том, что с помощью станций сопровождения авиационно-космических объектов в едином базисе измеряют текущие значения векторов дальности до снаряда и цели, вычитают из первого второй и определяют текущее значение вектора дальности до снаряда относительно цели, по измеренным в момент начала наблюдения векторам дальности цели и снаряда определяют значения векторов их скорости, на основе полученных данных прогнозируют траектории их полета до расчетной точки встречи, для прогнозируемых конечных условий встречи вычисляют значение вектора скорости снаряда относительно цели, по текущим измерениям векторов дальности снаряда и цели на протяжении всего их полета до встречи определяют текущие параметры их движения, включая и векторы их ускорения, на этой основе прогнозируют значения их координат, параметров движения, векторов дальности и скорости снаряда относительно цели, в каждый текущий момент времени на всем интервале прогноза определяют значения векторов промаха как векторное произведение трех векторных сомножителей - прогнозируемых орта скорости снаряда относительно цели, дальности снаряда относительно цели, орта скорости снаряда относительно цели, значения векторов промаха для текущего момента времени и всего интервала прогнозирования статистически обрабатывают для получения оптимальной оценки значения вектора текущего траекторного промаха, которую используют как параметр траекторного управления снарядом при наведении на цель и для уточнения прогноза параметров его движения, на интервале наблюдения за объектами осуществляют статистическую обработку полученных оптимальных оценок значений вектора текущего траекторного промаха и таким образом получают оптимальную по точности оценку вектора конечного промаха снаряда, расчетное время полета снаряда до прогнозируемой точки встречи с целью вычисляют как сумму текущего времени прогноза и скалярного произведения прогнозируемых векторов скорости и дальности снаряда относительно цели, деленного на квадрат модуля прогнозируемого вектора скорости снаряда относительно цели, в каждый текущий момент времени для всего интервала прогнозирования определяют массив значений расчетного времени полета снаряда до прогнозируемой точки встречи и осуществляют его статистическую обработку для получения оптимальной по точности оценки расчетного времени полета снаряда до прогнозируемой точки встречи с целью, получаемую оценку расчетного времени полета снаряда до прогнозируемой точки встречи с целью используют как предел текущего прогнозирования и как параметр траекторного управления снаряжением снаряда при подходе его к цели (патент РФ №2267090, кл. G01C 23/00, G01S 13/42, F42B 15/01 опубл 27.12.2005).
Недостатком данного способа являются заниженные функциональные возможности, так как в данном способе промах определяется как минимальное расстояние между снарядом и целью при их сближении. Однако наличие на снарядах неконтактных систем подрыва не всегда позволяет достичь минимального расстояния. Поэтому реальным промахом будет расстояние между снарядом и целью при подрыве снаряда. Оно наиболее точно характеризует точность наведения снаряда.
Технической задачей изобретения является расширение функциональных возможностей за счет оценки реального промаха.
Решение технической задачи изобретения заключается в том, что в способе определения точности наведения и сближения снаряда с целью по наблюдаемым параметрам их траекторного движения, в котором с помощью станций сопровождения авиационно-космических объектов в едином базисе измеряют текущие значения векторов дальности до снаряда и цели, вычитают из первого второй и определяют текущее значение вектора дальности до снаряда относительно цели, по измеренным в момент начала наблюдения векторам дальности цели и снаряда определяют значения векторов их скорости, на основе полученных данных прогнозируют траектории их полета до расчетной точки встречи, для прогнозируемых конечных условий встречи вычисляют значение вектора скорости снаряда относительно цели, по текущим измерениям векторов дальности снаряда и цели на протяжении всего их полета до встречи определяют текущие параметры их движения, включая векторы их ускорения, на этой основе прогнозируют значения их координат, параметров движения, векторов дальности и скорости снаряда относительно цели, в каждый текущий момент времени на всем интервале прогноза определяют значения векторов промаха как векторное произведение трех векторных сомножителей - прогнозируемых орта скорости снаряда относительно цели, дальности снаряда относительно цели и орта скорости снаряда относительно цели, значения векторов промаха для текущего момента времени и всего интервала прогнозирования статистически обрабатывают для получения оптимальной оценки значения вектора текущего траекторного промаха, которую используют как параметр траекторного управления снарядом при наведении на цель и для уточнения прогноза параметров его движения, на интервале наблюдения за снарядом и целью осуществляют статистическую обработку полученных оптимальных оценок значений вектора текущего траекторного промаха с получением оптимальной по точности оценки вектора конечного промаха снаряда, расчетное время полета снаряда до прогнозируемой точки встречи с целью вычисляют как сумму текущего времени прогноза и скалярного произведения прогнозируемых векторов скорости и дальности снаряда относительно цели, деленного на квадрат модуля прогнозируемого вектора скорости снаряда относительно цели, в каждый текущий момент времени для всего интервала прогнозирования определяют массив значений расчетного времени полета снаряда до прогнозируемой точки встречи и осуществляют его статистическую обработку для получения оптимальной по точности оценки расчетного времени полета снаряда до прогнозируемой точки встречи с целью, получаемую оценку расчетного времени полета снаряда до прогнозируемой точки встречи с целью используют как предел текущего прогнозирования и как параметр траекторного управления снаряжением снаряда при подходе его к цели, дополнительно определяют время в момент подрыва снаряда Тп, определяют векторы дальности до цели Дц(Тп) и снаряда Дс(Тп) в момент подрыва снаряда, при этом величину реального промаха Δр(t, Тп) определяют как расстояние между снарядом и целью в момент Тп по формуле:
Δp(t, Тп)=Дц(Тп)-Дс(Тп),
сравнивают значение векторов реального промаха Δp(t, Тп) и траекторного промаха Δопт(t, Т), по результатам сравнения оценивают точность наведения снаряда.
На чертеже показаны траектории цели и снаряда.
Способ осуществляется путем измерений с помощью станций сопровождения авиационно-космических объектов в едином базисе текущих значений вектора дальности до снаряда и цели следующим образом:
измеряют в едином базисе текущие значения векторов дальности до цели Дц(t) и снаряда Дс(t);
по измеренным значениям Дц(t), Дс(t) определяют текущее значение вектора дальности снаряда относительно цели Дсц(t);
по измерениям Дц, состоявшимся до момента стрельбы t0, определяют известным образом значения векторов скоростей Vц(t0) и ускорения jц(t0) цели;
прогнозируют известным образом на основе полученных параметров Дц(t0), Vц(t0), jц(t0) траекторию полета цели до расчетной точки встречи со снарядом, то есть на время Т;
прогнозируют известным образом на основе данных начальных условий по координатам Дс(t0) и скорости Vc(t0) снаряда траекторию его полета до расчетной точки встречи с целью, то есть на время Т;
для конечных прогнозируемых условий встречи вычисляют «относительную скорость» снаряда Vr(t0+T)=Vсц(t0+T)=Vc(t0+T)-V(t0+T);
на всей траектории движения цели по текущим измерениям Дц(t) определяют известным образом значения ее текущих векторов скорости Vц(t) и ускорения jц(t);
на всей траектории движения цели на основе полученных текущих параметров Дц(t), Vц(t), jц(t) известным образом прогнозируют на время Т, изменяющееся в диапазоне от 0 до Т включительно, траекторию Дц(t+Т) и значения вектора скорости цели Vц(t+Т);
на всей траектории движения снаряда по текущим измерениям Дс(t) определяют известным образом значения его текущих векторов скорости Vc(t) и ускорения jc(t);
на всей траектории движения снаряда на основе полученных текущих параметров Дс(t), Vc(t), jc(t) известным образом прогнозируют на время Т траекторию Дс(t+Т) и значение вектора его скорости Vc(t+T);
на протяжении всего процесса сближения снаряда с целью на основе полученных прогнозируемых значений векторов Дс(t+Т), Дц(t+Т) определяют значение прогнозируемого вектора дальности снаряда относительно цели Дсц(t+Т)
Дсц(t+τ)=Дc(t+τ)-Дц(1+τ);
на протяжении всего процесса сближения снаряда с целью на основе полученных прогнозируемых значений векторов Vc(t+T), Vц(t+Т) определяют прогнозируемый вектор скорости снаряда относительно цели
Vr(t+τ)=Vсц(t+τ)=Vc(t+τ)-Vц(t+τ);
вектор промаха Δ(t, τ) как минимальное расстояние между снарядом и целью при их сближении вычисляют по формуле двойного векторного произведения
Δ(t, τ)=Vr 0(t+τ)*Дсц(t+τ)*Vr 0(t+τ),
где Vr 0(t+τ)-орт прогнозируемого вектора скорости снаряда относительно цели. Vr 0(t+τ)=Vr(t+τ)/|Vr 0(t+τ)|;
определяют время в момент подрыва снаряда Тп;
определяют векторы дальности до цели Дц(Тп) и снаряда Дс(Тп) в момент подрыва снаряда;
вектор реального промаха Δp(t, Tп) как расстояние между снарядом и целью в момент Тп вычисляют по формуле
Δp(t, Тп)=Дц(Тп)-Дc(Тп);
в каждый текущий момент времени t при возрастающем Т от 0 до Т определяют массив Δ(t, 0)+Δ(t, T) значений вектора промаха Δ(t, T) и осуществляют его статистическую обработку для получения оптимальной оценки значения вектора текущего траекторного промаха Δопт(t, Т);
получаемую оптимальную оценку вектора текущего траекторного промаха Δопт(t, Т) используют как параметр траекторного управления снарядом при наведении его на цель;
параметр траекторного управления Δопт(t, Т) снарядом используют для уточнения прогноза его движения;
на интервале наблюдения за объектами tн<t≤tк осуществляют статистическую обработку полученных оптимальных оценок значений векторов текущего траекторного промаха Δопт(t, Т) и, таким образом, получают оптимальную оценку
(Δопт(tк, Т))опт вектора конечного промаха снаряда;
время полета снаряда до расчетной точки встречи с целью Т вычисляют по формуле суммы текущего времени прогноза и скалярного произведения прогнозируемых векторов скорости и дальности снаряда относительно цели, деленного на квадрат модуля прогнозируемого вектора скорости снаряда относительно цели
T(t,τ)=τ+Vr(t+τ)*Дсц(t+τ)/|Vr(t+τ)|2;
в каждый текущий момент времени t при возрастающем t от 0 до Т определяют массив значений T(t, 0)+T(t, T) и осуществляют их статистическую обработку для получения оптимальной по точности оценки Tопт(t, T);
получаемую оптимальную оценку расчетного времени полета снаряда до прогнозируемой точки встречи с целью Топт(t, Т) используют как предел текущего времени прогнозирования и как параметр траекторного управления снаряжением снаряда при подходе его к цели;
сравнивают значения векторов реального промаха Δp(t, Тп) и траекторного промаха Δопт(t, Т), по результатам сравнения оценивают точность наведения снаряда.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОПАДАНИЙ ПОРАЖАЮЩИХ ЭЛЕМЕНТОВ СНАРЯДА В ЦЕЛЬ | 2007 |
|
RU2357186C1 |
| КОМПЛЕКСНЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ ТОЧНОСТИ НАВЕДЕНИЯ И СБЛИЖЕНИЯ СНАРЯДА С ЦЕЛЬЮ ПО НАБЛЮДАЕМЫМ ПАРАМЕТРАМ ИХ ТРАЕКТОРНОГО ДВИЖЕНИЯ | 2004 |
|
RU2267090C1 |
| СПОСОБ ПРИЦЕЛИВАНИЯ ПРИ АТАКЕ СКОРОСТНЫХ ЦЕЛЕЙ ИСТРЕБИТЕЛЕМ ПО СПРЯМЛЕННОЙ ТРАЕКТОРИИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2000 |
|
RU2170907C1 |
| СПОСОБ ПЕРЕХВАТА ВОЗДУШНЫХ ЦЕЛЕЙ ЛЕТАТЕЛЬНЫМИ АППАРАТАМИ | 2012 |
|
RU2498342C1 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЙ ВЕРТОЛЕТА С ВЫСОКОВОЛЬТНЫМИ ЛИНИЯМИ ЭЛЕКТРОПЕРЕДАЧ | 2009 |
|
RU2410719C2 |
| СПОСОБ ДОСТАВКИ ПОЛЕЗНОЙ НАГРУЗКИ НА ВОЗДУШНЫЙ ОБЪЕКТ | 2023 |
|
RU2804765C1 |
| СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ СНАРЯДА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2395102C1 |
| СПОСОБ ДОСТАВКИ ПОЛЕЗНОЙ НАГРУЗКИ НА ВОЗДУШНЫЙ ОБЪЕКТ | 2022 |
|
RU2784492C1 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЙ ВЕРТОЛЕТА С ВЫСОКОВОЛЬТНЫМИ ЛИНИЯМИ ЭЛЕКТРОПЕРЕДАЧ | 2009 |
|
RU2410718C2 |
| СПОСОБ ИЗМЕРЕНИЯ ДАЛЬНОСТИ ДО ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2365941C1 |
Изобретение относится к системам сопровождения авиационно-космических объектов и может быть использовано для определения точности наведения снаряда на цель и контроля конечных условий их сближения. Технический результат - расширение функциональных возможностей. Определяют время в момент подрыва снаряда, определяют дальности до цели и снаряда в момент подрыва снаряда. Величину реального промаха определяют как расстояние между снарядом и целью в момент подрыва снаряда. Сравнивают значение реального промаха и траекторного промаха и по результатам сравнения оценивают точность наведения снаряда. 1 ил.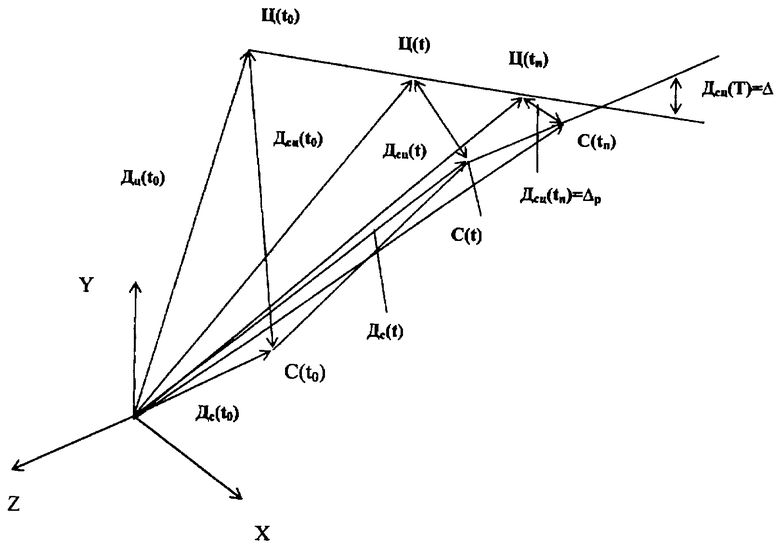
Способ определения точности наведения и сближения снаряда с целью по наблюдаемым параметрам их траекторного движения, в котором с помощью станций сопровождения авиационно-космических объектов в едином базисе измеряют текущие значения векторов дальности до снаряда и цели, вычитают из первого второй и определяют текущее значение вектора дальности до снаряда относительно цели, по измеренным в момент начала наблюдения векторам дальности цели и снаряда определяют значения векторов их скорости, на основе полученных данных прогнозируют траектории их полета до расчетной точки встречи, для прогнозируемых конечных условий встречи вычисляют значение вектора скорости снаряда относительно цели, по текущим измерениям векторов дальности снаряда и цели на протяжении всего их полета до встречи определяют текущие параметры их движения, включая вектора их ускорения, прогнозируют значения их координат, параметров движения, векторов дальности и скорости снаряда относительно цели, в каждый текущий момент времени на всем интервале прогноза определяют значения векторов промаха как векторное произведение трех векторных сомножителей - прогнозируемых орта скорости снаряда относительно цели, дальности снаряда относительно цели и орта скорости снаряда относительно цели, значения векторов промаха для текущего момента времени и всего интервала прогнозирования статистически обрабатывают для получения оптимальной оценки значения вектора текущего траекторного промаха, которую используют как параметр траекторного управления снарядом при наведении на цель и для уточнения прогноза параметров его движения, на интервале наблюдения за снарядом и целью осуществляют статистическую обработку полученных оптимальных оценок значений вектора текущего траекторного промаха с получением оптимальной по точности оценки вектора конечного промаха снаряда, расчетное время полета снаряда до прогнозируемой точки встречи с целью вычисляют как сумму текущего времени прогноза и скалярного произведения прогнозируемых векторов скорости и дальности снаряда относительно цели, деленного на квадрат модуля прогнозируемого вектора скорости снаряда относительно цели, в каждый текущий момент времени для всего интервала прогнозирования определяют массив значений расчетного времени полета снаряда до прогнозируемой точки встречи и осуществляют его статистическую обработку для получения оптимальной по точности оценки расчетного времени полета снаряда до прогнозируемой точки встречи с целью, получаемую оценку расчетного времени полета снаряда до прогнозируемой точки встречи с целью используют как предел текущего прогнозирования и как параметр траекторного управления снаряжением снаряда при подходе его к цели, отличающийся тем, что определяют время в момент подрыва снаряда Тп, определяют дальности до цели Дц(Тп) и снаряда Дс(Тп) в момент подрыва снаряда, при этом величину реального промаха Δp(t, Тп) определяют как расстояние между снарядом и целью в момент Тп по формуле:
Δр(t, Тп)=Дц(Тп)-Дс(Тп),
сравнивают значение реального промаха Δp(t, Тп) и траекторного промаха Δопт(t, Т) и по результатам сравнения оценивают точность наведения снаряда.
| КОМПЛЕКСНЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ ТОЧНОСТИ НАВЕДЕНИЯ И СБЛИЖЕНИЯ СНАРЯДА С ЦЕЛЬЮ ПО НАБЛЮДАЕМЫМ ПАРАМЕТРАМ ИХ ТРАЕКТОРНОГО ДВИЖЕНИЯ | 2004 |
|
RU2267090C1 |
| СПОСОБ ПРИЦЕЛИВАНИЯ ПРИ АТАКЕ СКОРОСТНЫХ ЦЕЛЕЙ ИСТРЕБИТЕЛЕМ ПО СПРЯМЛЕННОЙ ТРАЕКТОРИИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2000 |
|
RU2170907C1 |
| СПОСОБ СТРЕЛЬБЫ БОЕВОЙ МАШИНЫ ПО ВЫСОКОСКОРОСТНОЙ ЦЕЛИ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2138757C1 |
| СИСТЕМА НАВЕДЕНИЯ ТЕЛЕУПРАВЛЯЕМОЙ РАКЕТЫ | 2000 |
|
RU2191345C2 |
| Устройство для бесконтактной передачи измерительных сигналов | 1978 |
|
SU752573A1 |
| US 4502650 A, 05.03.1985 | |||
| US 6302354 B1, 16.10.2001. | |||

