Изобретение относится к радиолокационной технике и может использоваться для обеспечения безопасных полетов вертолетов, а именно для предупреждения их столкновений с высоковольтными линиями электропередач.
Известен способ предотвращения столкновений вертолета с высоковольтными линиями электропередач, заключающийся в том, что принимают электромагнитные колебания с помощью приемного устройства, размещаемого на вертолете, прием электромагнитных колебаний осуществляют в диапазоне радиоволн, излучаемых высоковольтными линиями электропередач, при этом прием излучаемых высоковольтными линиями электропередач электромагнитных колебаний ведут с различных направлений с помощью нескольких приемных антенн, максимумы диаграмм направленности которых ориентированы в разных угловых секторах плоскости полета вертолета, и по наличию сигнала в одной из приемных антенн определяют угловое положение проводов высоковольтной линии электропередач относительно корпуса вертолета, сравнивают значения принятого сигнала с опорными напряжениями, соответствующими величинам напряженности электромагнитного поля, излучаемого высоковольтной линией электропередачи на известном расстоянии от нее, и по результатам сравнения принимают решение по корректировке направления полета вертолета. (Патент РФ на изобретение №2156985, G01S 13/93, G08G 5/04, опубл. 27.09.2000).
Недостатками данного способа предотвращения столкновений вертолета с высоковольтными линиями электропередач является зависимость результатов измерения от погодных условий. Так, уровни напряженности электромагнитного поля, излучаемого линией электропередач, вызванные высокочастотными переходными процессами, могут быть на 10-20 дБ больше при высокой влажности, тумане или дожде, чем при сухой погоде (Дональд Р.Ж. Уайт Электромагнитная совместимость радиоэлектронных средств и непреднамеренные помехи. Выпуск 1. Общие вопросы ЭМС. Межсистемные помехи. М., Советское радио. 1977), в результате чего при обработке сигнала растет ошибка определения кратчайшего расстояния до линии электропередач. Кроме того, способ неработоспособен при выключении напряжения в линии электропередач.
Технической задачей изобретения является устранение указанных недостатков. Осуществление измерения дальности до проводов за счет известного, заданного, расстояния между двумя опорами.
Технический результат изобретения достигается тем, что в способе предотвращения столкновений вертолета с высоковольтными линиями электропередач, заключающемся в том, что осуществляют прием сигналов в диапазоне радиоволн, дополнительно осуществляют излучение и прием сигналов пеленгатором, установленным на вертолете, причем центр зоны сканирования совпадает со строительной осью вертолета, пеленгатор сканирует пространство по направлению полета вертолета, определяют углы пеленга α11, α21 каждой из двух опор линии электропередач, находящихся на заданном расстоянии друг от друга, пеленгатором относительно строительной оси вертолета, причем α11 - угол пеленга первой опоры линии электропередач, α21 - угол пеленга второй опоры линии электропередач, затем пролетают заданное расстояние LB без изменения курса, вновь определяют углы пеленга α12, α22 каждой из двух опор линии электропередач пеленгатором относительно строительной оси вертолета, причем α12 - угол пеленга первой опоры линии электропередач, α22 - угол пеленга второй опоры линии электропередач, определяют дальность DЛЭП до проводов линии электропередач по направлению строительной оси вертолета из выражения:

где LB - заданное расстояние между первой и второй точками измерения пеленгов опор линии электропередачи, µ - угол между направлением линии электропередач и направлением, перпендикулярным строительной оси вертолета, исходя из значения дальности DЛЭП принимают решение по корректировке направления полета вертолета.
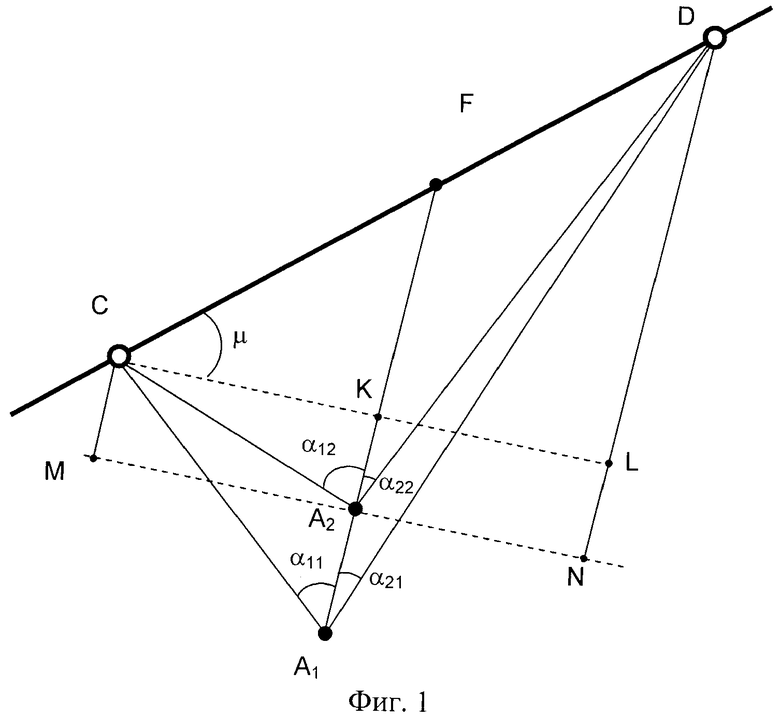
На фиг.1 представлена схема дополнительных построений для вывода формулы определения расстояния до линии электропередач, где:
CD - высоковольтная линия электропередач;
С - точка размещения первой опоры линии электропередач;
D - точка размещения второй опоры линии электропередач.
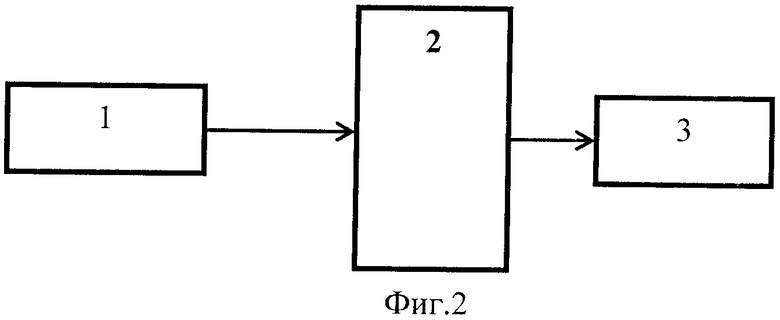
Для пояснения заявляемого способа как процесса выполнения действий над материальным объектом с помощью материальных средств и подтверждения возможности осуществления заявляемого изобретения на фиг.2 представлена функциональная схема устройства для реализации способа предотвращения столкновений вертолета с высоковольтными линиями электропередач, где:
1 - пеленгатор; 2 - вычислитель; 3 - индикатор.
Устройство для предотвращения столкновений вертолета с высоковольтными линиями электропередач содержит последовательно соединенные пеленгатор 1, вычислитель 2 и индикатор 3.
В качестве пеленгатора могут быть использованы радиолокационные сканирующие пеленгаторы, осуществляющие излучение и прием электромагнитной энергии и выдающие на выходе пеленг обнаруженного объекта.
Устройство работает следующим образом.
На фиг.1 в точках С и D расположены опоры линии электропередач (ЛЭП). Прямая, проходящая через указанные точки, это провода линии электропередач.
Вертолет находится в точке A1 и выполняет полет в направлении линии A1F. На вертолете размещен пеленгатор (радиолокационного типа либо оптико-электронного).
Пеленгатор 1 сканирует пространство, осуществляя сканирование по часовой стрелке. Пеленги объектов α11, α21, α12, α22, измеряемые пеленгатором, отсчитываются от линии, проходящей через пеленгатор, параллельной строительной оси вертолета.
При сканировании пространства пеленгатором при нахождении вертолета в точке А1 измеряются пеленги опор ЛЭП. Пеленги опоры С - α11, а опоры D - α21.
Измерив пеленги опор ЛЭП при нахождении вертолета в точке А1, вертолет пролетает заданное расстояние от точки A1 до точки А2 без изменения курса и вновь измеряет пеленги опор ЛЭП α12 и α22.
Заданное расстояние от точки А1 до точки А2 обозначим LB и определим как:

где t - время полета из точки A1 в точку А2, VB - скорость вертолета.
Дальность до проводов ЛЭП согласно фиг.1 определим как:

Рассмотрим определение расстояний СМ и МА2 опоры С.
Используя теорему синусов, получим:

где СА2 - расстояние от вертолета до первой опоры ЛЭП при втором измерении пеленгов опор ЛЭП.
Или

Отрезок А2К, как видно из фиг.1, равен отрезку СМ и определится с учетом формулы (4):

Отрезок МА2 определится:

Получим аналогичные формулы для отрезков DN и А2N второй опоры D:

где DA2 - расстояние от вертолета до второй опоры ЛЭП при втором измерении пеленгов опор ЛЭП.


Угол µ определяет направление ЛЭП по отношению к направлению, перпендикулярному строительной оси вертолета. Тангенс угла µ согласно фиг.1 определяется как:


Тогда дальность до проводов ЛЭП будет определяться формулой:

После преобразований получим:

Значение дальности до линии передачи электроэнергии индицируется индикатором 3 и служит для предупреждения столкновений вертолета с высоковольтными линиями электропередач.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЙ ВЕРТОЛЕТА С ВЫСОКОВОЛЬТНЫМИ ЛИНИЯМИ ЭЛЕКТРОПЕРЕДАЧ | 2009 |
|
RU2410719C2 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЙ ВЕРТОЛЕТА С ВЫСОКОВОЛЬТНЫМИ ЛИНИЯМИ ЭЛЕКТРОПЕРЕДАЧ | 2008 |
|
RU2403591C2 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЙ ВЕРТОЛЕТА С ВЫСОКОВОЛЬТНЫМИ ЛИНИЯМИ ЭЛЕКТРОПЕРЕДАЧ | 2009 |
|
RU2410720C1 |
| УСТРОЙСТВО ДЛЯ ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЙ ВЕРТОЛЕТА С ВЫСОКОВОЛЬТНЫМИ ЛИНИЯМИ ЭЛЕКТРОПЕРЕДАЧИ | 2010 |
|
RU2441254C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ОПОРЫ ЛИНИИ ЭЛЕКТРОПЕРЕДАЧ | 2011 |
|
RU2472177C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ОПОРЫ ЛИНИИ ЭЛЕКТРОПЕРЕДАЧ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2410709C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТОЧНОСТИ НАВЕДЕНИЯ И СБЛИЖЕНИЯ СНАРЯДА С ЦЕЛЬЮ ПО НАБЛЮДАЕМЫМ ПАРАМЕТРАМ ИХ ТРАЕКТОРНОГО ДВИЖЕНИЯ | 2007 |
|
RU2355990C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОПАДАНИЙ ПОРАЖАЮЩИХ ЭЛЕМЕНТОВ СНАРЯДА В ЦЕЛЬ | 2007 |
|
RU2357186C1 |
| Способ горизонтирования системы координат угломерного прибора по двум опорным точкам | 2024 |
|
RU2832842C1 |
| УСТРОЙСТВО ЗАЩИТЫ ЛИНИИ ЭЛЕКТРОПЕРЕДАЧ | 2009 |
|
RU2416850C1 |
Изобретение относится к радиолокационной технике и может использоваться для предупреждения столкновений вертолетов с высоковольтными линиями передач. Способ заключается в приеме электромагнитных колебаний, отраженных от опор линии передачи электроэнергии, в диапазоне радиоволн пеленгатором, размещенным на вертолете, причем центр зоны сканирования совпадает со строительной осью вертолета. С помощью пеленгатора сканируют пространство по направлению полета вертолета, определяют углы пеленга α11, α21 каждой из двух опор линии электропередач, находящихся на заданном расстоянии друг от друга, относительно строительной оси вертолета, пролетают заданное расстояние без изменения курса, вновь определяют углы пеленга α12, α22 каждой из двух опор линии электропередач пеленгатором относительно строительной оси вертолета, определяют дальность до проводов линии электропередач по направлению строительной оси вертолета из выражения:  где LB - заданное расстояние, µ - угол между линией электропередач и строительной осью вертолета, исходя из значения дальности принимают решение по корректировке направления полета вертолета. Достигаемым техническим результатом изобретения является повышение надежности при обеспечении предотвращения столкновений вертолета с высоковольтными линиями электропередач. 2 ил.
где LB - заданное расстояние, µ - угол между линией электропередач и строительной осью вертолета, исходя из значения дальности принимают решение по корректировке направления полета вертолета. Достигаемым техническим результатом изобретения является повышение надежности при обеспечении предотвращения столкновений вертолета с высоковольтными линиями электропередач. 2 ил.
Способ предотвращения столкновений вертолета с высоковольтными линиями электропередач, заключающийся в том, что осуществляют прием сигналов в диапазоне радиоволн, отличающийся тем, что осуществляют излучение и прием сигналов пеленгатором, установленном на вертолете, причем центр зоны сканирования совпадает со строительной осью вертолета, пеленгатор сканирует пространство по направлению полета вертолета, определяют углы пеленга α11, α21 каждой из двух опор линии электропередач, находящихся на заданном расстоянии друг от друга, пеленгатором относительно строительной оси вертолета, причем α11 - угол пеленга первой опоры линии электропередач, α21 - угол пеленга второй опоры линии электропередач, пролетают заданное расстояние без изменения курса, вновь определяют углы пеленга α12, α22 каждой из двух опор линии электропередач пеленгатором относительно строительной оси вертолета, причем α12 - угол пеленга первой опоры линии электропередач, α22 - угол пеленга второй опоры линии электропередач, определяют дальность DЛЭП до проводов линии электропередач по направлению строительной оси вертолета из выражения
 где LB - заданное расстояние между первой и второй точками измерения пеленгов опор линии электропередачи, µ - угол между линией электропередачи и строительной осью вертолета, исходя из значения дальности DЛЭП принимают решение по корректировке направления полета вертолета.
где LB - заданное расстояние между первой и второй точками измерения пеленгов опор линии электропередачи, µ - угол между линией электропередачи и строительной осью вертолета, исходя из значения дальности DЛЭП принимают решение по корректировке направления полета вертолета.
| СПОСОБ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЙ ВЕРТОЛЕТА С ВЫСОКОВОЛЬТНЫМИ ЛИНИЯМИ ЭЛЕКТРОПЕРЕДАЧ | 1998 |
|
RU2156985C2 |
| УСТРОЙСТВО ДЛЯ ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЯ ВЕРТОЛЕТА С ВЫСОКОВОЛЬТНЫМИ ЛИНИЯМИ ЭЛЕКТРОПЕРЕДАЧ | 2007 |
|
RU2326407C1 |
| СПОСОБ ФУНКЦИОНИРОВАНИЯ ИНФОРМАЦИОННО-ВЫЧИСЛИТЕЛЬНОЙ СИСТЕМЫ РАКЕТЫ ПРИ НАВЕДЕНИИ НА ЦЕЛЬ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2311605C2 |
| МНОГОФУНКЦИОНАЛЬНЫЙ РАДИОЛОКАТОР | 2006 |
|
RU2315334C1 |
| US 5874917 A, 23.02.1999 | |||
| WO 03091967 A1, 06.11.2003 | |||
| WO 03005058 B1, 19.06.2003. | |||

