Изобретение относится к ракетной технике и предназначено для использования в системах наведения телеуправляемых ракет.
Известна система наведения телеуправляемой ракеты, состоящая из пеленгатора цели и контура управления ракетой, включающего в каждом канале управления по тангажу и курсу последовательно соединенные пеленгатор ракеты, блок формирования команды управления, пропорциональной линейному рассогласованию между ракетой и опорной траекторией наведения, второй вход которого подключен к соответствующему выходу пеленгатора цели, устройство передачи команд управления на ракету и ракету ([1], с. 30, 327-329).
Известная система обладает низкой точностью наведения ракеты на подвижные цели из-за возникающей динамической ошибки, определяемой параметрами движения цели и инерционностью управления ракетой. Динамическая ошибка наведения ракеты определяется соотношением ([1], с. 390)
h(t)≈jнk(t)/K0(t), (1)
где jнk - нормальное ускорение, соответствующее движению ракеты по опорной траектории наведения;
К0 - коэффициент усиления контура управления ракетой, определяющий инерционность управления.
Потребное нормальное ускорение ракеты jнk при теленаведении определяется соотношением ([2], с. 93)
где K1, K2 - характеристические функции времени, известные для заданной ракеты; - угловая скорость и угловое ускорение текущей координаты опорной (требуемой) траектории наведения.
- угловая скорость и угловое ускорение текущей координаты опорной (требуемой) траектории наведения.
Выбор в системе наведения коэффициента усиления К0 связан с противоречивыми требованиями. С одной стороны, при его увеличении уменьшается инерционность управления и повышается динамическая точность наведения, а с другой стороны возрастает колебательность наведения, контур управления ракетой начинает реагировать на слабые возмущения, при этом возрастают также флуктуационные ошибки наведения. При больших значениях коэффициента К0 возможна потеря устойчивости наведения.
Наиболее близкой к предлагаемой является система наведения телеуправляемой ракеты, состоящая из пеленгатора цели и контура управления ракетой, включающего в каждом канале управления по тангажу и курсу последовательно соединенные дифференцирующе-сглаживающий фильтр, вход которого подключен к соответствующему выходу пеленгатора цели, и блок формирования сигнала компенсации динамической ошибки, второй вход которого подключен к второму выходу дифференцирующе-сглаживающего фильтра, последовательно соединенные пеленгатор ракеты, блок формирования команды управления, пропорциональной линейному рассогласованию между ракетой и опорной траекторией наведения, второй вход которого подключен к соответствующему выходу пеленгатора цели, сумматор, второй вход которого подключен к выходу блока формирования сигнала компенсации динамической ошибки, устройство передачи команд управления и ракету ([1], с. 380, 393-395).
Суть известной системы теленаведения ракеты заключается в том, что в команду управления, формируемую пропорционально линейному рассогласованию между ракетой и опорной траекторией наведения, вводится корректирующий сигнал, смещающий опорную траекторию наведения на текущую величину вычисленной динамической ошибки наведения ракеты (1), т.е. сигнал компенсации динамической ошибки наведения определяется как
λк(t) = -h(t). (3)
Так, например, для наведения ракеты по методу трех точек или методу половинного спрямления траектории сигналы компенсации динамической ошибки наведения определяются соответственно выражениями ([3], с. 141)

где Dpт,  - известные функции дальности ракеты и ее первая производная;
- известные функции дальности ракеты и ее первая производная;
t0 - время, оставшееся до встречи с целью.
Таким образом, параметры текущей координаты опорной траектории наведения для формирования компенсационного сигнала λк в системе теленаведения при известных характеристических функциях ракеты определяются через угловую скорость  и угловое ускорение
и угловое ускорение  движения цели. Такая система с параметрической коррекцией ошибки позволяет повысить точность наведения ракеты на подвижные цели.
движения цели. Такая система с параметрической коррекцией ошибки позволяет повысить точность наведения ракеты на подвижные цели.
Вместе с тем она обладает и недостатками, которые связаны с необходимостью точного определения производных  от угловых координат цели в условиях априорной неопределенности относительно движения цели. Дело в том, что нелинейный характер изменения угловых координат цели и их производных приводит к существенным методической и динамической ошибкам формирования компенсационного сигнала. Так как закон изменения угловой координаты цели, даже при прямолинейном движении, носит сложный характер, имеющий отличные от нуля производные порядка выше второго, то для получения необходимых точных значений угловой скорости и углового ускорения цели требуется широкополосный дифференцирующе-сглаживающий фильтр. При этом в сигнале компенсации динамической ошибки повышается уровень флуктуационных шумов, вызванных дифференцированием ошибок измерения координат, которые соответственно приводят к увеличению случайной составляющей ошибки наведения ракеты. В связи с этим ограничение полосы пропускания дифференцирующе-сглаживающего фильтра, определяемое допустимым уровнем флуктуационной ошибки, приводит к динамической погрешности выработки первой и второй производных угловой координаты цели и соответственно к неполной компенсации динамической ошибки наведения ракеты даже при прямолинейном полете цели и особенно при маневрирующей цели.
от угловых координат цели в условиях априорной неопределенности относительно движения цели. Дело в том, что нелинейный характер изменения угловых координат цели и их производных приводит к существенным методической и динамической ошибкам формирования компенсационного сигнала. Так как закон изменения угловой координаты цели, даже при прямолинейном движении, носит сложный характер, имеющий отличные от нуля производные порядка выше второго, то для получения необходимых точных значений угловой скорости и углового ускорения цели требуется широкополосный дифференцирующе-сглаживающий фильтр. При этом в сигнале компенсации динамической ошибки повышается уровень флуктуационных шумов, вызванных дифференцированием ошибок измерения координат, которые соответственно приводят к увеличению случайной составляющей ошибки наведения ракеты. В связи с этим ограничение полосы пропускания дифференцирующе-сглаживающего фильтра, определяемое допустимым уровнем флуктуационной ошибки, приводит к динамической погрешности выработки первой и второй производных угловой координаты цели и соответственно к неполной компенсации динамической ошибки наведения ракеты даже при прямолинейном полете цели и особенно при маневрирующей цели.
Указанные недостатки снижают точность наведения ракеты на подвижные цели и особенно на цели, совершающие маневр.
Задачей настоящего изобретения является повышение точности наведения телеуправляемой ракеты на подвижные цели, в том числе и на маневрирующие.
Поставленная задача достигается тем, что в систему наведения телеуправляемой ракеты, состоящей из пеленгатора цели, первого и второго дифференцирующе-сглаживающих фильтров и контура управления ракетой, включающего в каждом канале управления по тангажу и курсу блок формирования сигнала компенсации динамической ошибки, последовательно соединенные пеленгатор ракеты, блок формирования команды управления, пропорциональной линейному рассогласованию между ракетой и опорной траекторией наведения, второй вход которого подключен к соответствующему выходу пеленгатора цеди, сумматор, второй вход которого подключен к выходу блока формирования сигнала компенсации динамической ошибки, устройство передачи команд управления и ракету, введены преобразователь координат из сферической системы координат в прямоугольную, преобразователь координат из прямоугольной системы координат в сферическую, третий дифференцирующе-сглаживающий фильтр, первый, второй и третий блоки формирования сигналов линейных координаты, скорости и ускорения цели, каждый из которых содержит линейный фильтр с регулируемой полосой пропускания, первый, второй, третий, четвертый, пятый и шестой блоки коэффициентов, первый, второй и третий инерционные звенья, последовательно соединенные блок выделения модуля, пороговое устройство, второй вход которого подключен к задатчику опорного сигнала, и управляемый коммутатор, причем второй, третий, четвертый, пятый, шестой и седьмой входы управляемого коммутатора подключены соответственно к выходам первого, второго, третьего, четвертого, пятого и шестого блоков коэффициентов, первый, второй и третий выходы управляемого коммутатора соединены соответственно с входами первого, второго и третьего инерционных звеньев, выходы которых соединены соответственно со вторым, третьим и четвертым входами линейного фильтра с регулируемой полосой пропускания, а первый, второй и третий входы преобразователя координат из сферической системы координат в прямоугольную подключены соответственно к первому, второму и третьему выходам пеленгатора цели, первый и второй выходы преобразователя координат из прямоугольной системы координат в сферическую соединены в соответствующем канале управления соответственно с первым и вторым входами блока формирования сигнала компенсации динамической ошибки, первые входы линейных фильтров с регулируемой полосой пропускания соответственно первого, второго и третьего блоков формирования сигналов линейных координаты, скорости и ускорения цели подключены соответственно к первому, второму и третьему выходам преобразователя координат из сферической системы координат в прямоугольную, а первые, вторые и третьи выходы их соединены соответственно с первыми, вторыми и третьими входами соответствующего канала преобразователя координат из прямоугольной системы координат в сферическую, при этом входы первого, второго и третьего дифференцирующе-сглаживающих фильтров подключены соответственно к первым входам линейных фильтров с регулируемой полосой пропускания, а выходы соединены соответственно с входами блоков выделения модуля соответственно первого, второго и третьего блоков формирования сигналов линейных координаты, скорости и ускорения.
Введение в систему наведения ракеты новых блоков с их связями позволило по сравнению с известной повысить точность наведения ракеты на подвижные цеди.
Суть предлагаемого изобретения заключается в том, что формирование сигналов скорости и ускорения цели проводится в прямоугольной системе координат, линейно связанной с параметрами движения цели, и последующем их преобразованием в необходимые для формирования компенсирующего сигнала сферические координаты. Это позволяет при наведении ракеты на неманеврирующую цель проводить глубокое сглаживание ее прямоугольных координаты, скорости и ускорения, практически исключающее флуктуационные ошибки в сигнале компенсации динамической ошибки наведения ракеты. При этом динамические ошибки формирования производных координат цели и соответственно динамическая ошибка формирования сигнала компенсации отсутствует, так как при таком движении цели ее линейное ускорение равно нулю, а линейная скорость постоянна. При наличии маневра цели система наведения за счет обнаружения отклонения траектории цели по оцениваемой линейной координате от прямолинейного полета, автоматически обнаруживает маневр, при этом полоса пропускания линейного фильтра для определения координаты, скорости и ускорения цеди целенаправленно регулируется таким образом, что обеспечивается минимизация суммарной динамической и флуктуационной ошибки формирования сигнала компенсации динамической ошибки наведения ракеты. Таким образом, предлагаемая система теленаведения обеспечивает точную компенсацию динамической ошибки наведения ракеты независимо от вида движения цели.
Сравнение заявляемого технического решения с известными позволило установить соответствие его критерию "новизна". При изучении других известных технических решений в данной области техники признаки, отличающие заявляемое изобретение от прототипа, не были выявлены, и поэтому они обеспечивают заявляемому техническому решению соответствие критерию "изобретательский уровень".
Функциональная схема системы наведения телеуправляемой ракеты приведена на чертеже.
Система наведения содержит пеленгатор цели 1 и контур управления ракетой, включающий в каждом из каналов управления по тангажу и курсу блок формирования сигнала компенсации динамической ошибки 2, последовательно соединенные пеленгатор ракеты 3, блок формирования команды управления, пропорциональной линейному рассогласованию между ракетой и опорной траекторией наведения 4, второй вход которого подключен к соответствующему выходу пеленгатора цели 1, сумматор 5, второй вход которого подключен к выходу блока формирования сигнала компенсации динамической ошибки 2, устройство передачи команд управления 6 и ракету 7, преобразователь координат из сферической системы координат в прямоугольную 8, первый, второй и третий входы которого подключены соответственно к первому, второму и третьему выходам пеленгатора цели 1, преобразователь координат из прямоугольной системы координат в сферическую 9, первый и второй выходы которого в соответствующем канале управления соединены соответственно с первым и вторым входами блока формирования сигнала компенсации динамической ошибки 2, а также содержит в каждом канале прямоугольной координаты цели соответственно первый, второй и третий блоки формирования сигналов линейных координаты, скорости и ускорения цели 10, 11, 12, каждый из которых включает линейный фильтр с регулируемой полосой пропускания 13, первый вход которого подключен к соответствующему выходу преобразователя координат из сферической системы координат в прямоугольную 8, первый, второй, третий, четвертый, пятый и шестой блоки коэффициентов 14, 15, 16, 17, 18, 19, первый, второй и третий инерционные звенья 20, 21, 22, последовательно соединенные блок выделения модуля 23, пороговое устройство 24, второй вход которого подключен к задатчику опорного сигнала 25, и управляемый коммутатор 26, второй, третий, четвертый, пятый, шестой и седьмой входы которого подключены соответственно к выходам первого, второго, третьего, четвертого, пятого и шестого блоков коэффициентов 14, 15, 16, 17, 18, 19, а первый, второй и третий выходы управляемого коммутатора 26 соединены соответственно с входами первого, второго и третьего инерционных звеньев 20, 21, 22, выходы которых соединены соответственно со вторым, третьим и четвертым входами линейного фильтра с регулируемой полосой пропускания 13, первый, второй и третий выходы которого соединены соответственно с первым, вторым и третьим входами в соответствующем канале преобразователя координат из прямоугольной системы координат в сферическую 9, первый, второй и третий дифференцирующе-сглаживающие фильтры 27, 28, 29, входы которых соответственно подключены к входам линейных фильтров с регулируемой полосой пропускания 13, а выходы соединены соответственно с входами блоков выделения модуля 23 соответственно первого, второго и третьего блоков формирования линейных координаты, скорости и ускорения 10, 11, 12.
Составляющие элементы системы - пеленгатор цели 1, пеленгатор ракеты 3, устройство передачи команд управления 6 представляют собой известные штатные элементы систем наведения ракет ([4], с. 335). Элементы - блок формирования команды управления, пропорциональной линейному рассогласованию между ракетой и опорной траекторией наведения 4, блок формирования сигнала компенсации динамической ошибки 2 также являются известными устройствами систем наведения телеуправляемых ракет и могут быть выполнены, например, на аналоговых счетно-решающих элементах ([1], с. 371, 394).
Элементы - сумматор 5, блок выделения модуля 23, пороговое устройство 24, инерционные звенья 20, 21, 22, блоки коэффициентов 14, 15, 16, 17, 18, 19 могут быть выполнены, например, на операционных усилителях ([5], соответственно с. 43, 145 (2.7.4). 232(4.1.1). 72(1.4.1). 42-43). Управляемый коммутатор 26 реализуется, например, на базе электронных ключей (там же. с. 236).
Линейный фильтр с регулируемой полосой пропускания 13, дифференцирующе-сглаживающие фильтры 27, 28, 29, преобразователь координат из сферической системы координат в прямоугольную 8, преобразователь координат из прямоугольной системы координат в сферическую 9 могут быть выполнены, например, в виде решающих схем на базе операционных усилителей, реализующих соответствующие алгоритмы преобразования ([5], с. 99-100, 264, 186, 191).
Опорный сигнал может задаваться, например, постоянным напряжением с блока питания отмасштабированным операционным усилителем. Величина опорного сигнала задатчика 25 устанавливается равной сигналу, соответствующему минимальному ускорению маневра цели по соответствующей линейной координате, при котором возникающая в системе дополнительная, по отношению к случаю неманеврирующей цели, динамическая ошибка еще допустимая с точки зрения требования к точности наведения ракеты.
Система наведения телеуправляемой ракеты работает следующим образом.
Пеленгатор цели 1 осуществляет сопровождение цели и измеряет ее текущие координаты: азимут βц, угол места εц и дальность Дц. После запуска ракеты 7 пеленгатор 3 захватывает ее на сопровождение и измеряет текущие координаты: азимут βp и угол места εp. Измеренные угловые координаты ракеты εp и цели εц (рассматривается работа одного канала управления, например, канала тангажа) поступают соответственно на первый и второй входы блока формирования команды управления, пропорциональной линейному рассогласованию между ракетой и опорной траекторией 4. Наведение ракеты на цель производится по закону, определяемому используемым методом наведения, которому соответствует опорная (кинематическая) траектория движения ракеты при имеющем место законе движения цели. Опорная траектория строится по измеренным координатам цели и, возможно, необходимому углу упреждения. Например, для метода трех точек угловая координата опорной траектории определяется соотношением ([3], с. 40)
εp = εц. (6)
Команда управления, формируемая пропорционально линейному рассогласованию между ракетой и опорной траекторией наведения, определяется в блоке 4, например, соотношением ([1], с. 370)
где h,  - линейное рассогласование между ракетой и опорной траекторией и скорость его изменения, h = Дрт(εц-εp);
- линейное рассогласование между ракетой и опорной траекторией и скорость его изменения, h = Дрт(εц-εp);
Т - коэффициент, определяемый условием обеспечения устойчивости контура управления ракетой.
Сформированная команда с выхода блока 4 поступает на первый вход сумматора 5, где суммируется с сигналом компенсации динамической ошибки, поступающим на его второй вход с блока 2. Суммарная команда управления поступает в устройство передачи команд 6 и далее на ракету 7. Отрабатывая команду, ракета наводится на цель, совмещаясь с нею в точке встречи.
С первого, второго и третьего выходов пеленгатора цели 1 текущие координаты цели βц, εц, Дц поступают соответственно на первый, второй и третий входы преобразователя координат из сферической системы координат в прямоугольную 8, где формируются прямоугольные координаты цели в соответствии с соотношениями ([3], с. 21)
Прямоугольные координаты цели xц, yц, zц соответственно с первого, второго и третьего выходов преобразователя координат 8 поступают на первые входы линейных фильтров с регулируемой полосой пропускания 13 соответственно первого, второго и третьего блоков формирования сигналов линейных координаты, скорости и ускорения цели 10, 11, 12. Далее рассматривается работа блока формирования сигналов линейных координаты, скорости и ускорения в одном канале, например канале прямоугольной координаты "у" - блока 11. В линейном фильтре с регулируемой полосой пропускания 13 происходит сглаживание сигнала линейной координаты цеди и одновременно выработка сглаженных сигналов линейной скорости и линейного ускорения. Структура и параметры фильтра 13, воспроизводящие параметры движения цели с постоянным линейным ускорением без динамической ошибки и с фильтрацией шума с минимальной среднеквадратической ошибкой, могут быть определены, например, на основе теории калмановской фильтрации. Алгоритм работы такого фильтра в классе линейных фильтров с конечной эффективной памятью описывается, например, соотношениями ([6], с. 220-235)
где Yц - входной сигнал - прямоугольная координата цели; - выходной сигнал - сглаженная линейная координата цели,
- выходной сигнал - сглаженная линейная координата цели, - выходной сигнал - сглаженная линейная скорость цели;
- выходной сигнал - сглаженная линейная скорость цели; - выходной сигнал - сглаженное ускорение цеди;
- выходной сигнал - сглаженное ускорение цеди;
k1, k2, k3 - коэффициенты сглаживания фильтра.
Коэффициенты k1, k2, k3 задают полосу пропускания линейного фильтра 13 соответственно по сигналам координаты, скорости и ускорения цели. Сигналы, соответствующие значениям коэффициентов k1, k2, k3, поступают соответственно на второй, третий и четвертый управляемые входы фильтра 13. При этом их значения имеют два уровня: первый для формирования траекторных параметров движения неманеврирующей цели, второй - маневрирующей цели. Сформированные сигналы линейных координаты  , скорости
, скорости  и ускорения
и ускорения  цели соответственно с первого, второго и третьего выходов линейного фильтра с регулируемой полосой пропускания 13 блока 11 поступают соответственно на первый, второй и третий входы канала прямоугольной координаты "y" преобразователя координат из прямоугольной системы координат в сферическую 9, на соответствующие входы по двум другим каналам "х" и "z" которого поступают также сигналы линейных координат
цели соответственно с первого, второго и третьего выходов линейного фильтра с регулируемой полосой пропускания 13 блока 11 поступают соответственно на первый, второй и третий входы канала прямоугольной координаты "y" преобразователя координат из прямоугольной системы координат в сферическую 9, на соответствующие входы по двум другим каналам "х" и "z" которого поступают также сигналы линейных координат  , скоростей
, скоростей  , и ускорений
, и ускорений  цели соответственно с первого, второго и третьего выходов линейных фильтров 13 соответствующих блоков формирования сигналов линейных координаты, скорости и ускорения цели 10, 12. В преобразователе координат из прямоугольной системы координат в сферическую 9 сигналы линейных координат
цели соответственно с первого, второго и третьего выходов линейных фильтров 13 соответствующих блоков формирования сигналов линейных координаты, скорости и ускорения цели 10, 12. В преобразователе координат из прямоугольной системы координат в сферическую 9 сигналы линейных координат  , скоростей
, скоростей  и ускорений
и ускорений  цели преобразуются в сигналы угловой скорости
цели преобразуются в сигналы угловой скорости  и углового ускорения
и углового ускорения  цели соответственно для каналов управления по тангажу "ε" и курсу "β",. например, по следующим соотношениям:
цели соответственно для каналов управления по тангажу "ε" и курсу "β",. например, по следующим соотношениям:
которые подучены дифференцированием известных зависимостей
где


Сформированные сигналы угловой скорости  и углового ускорения
и углового ускорения  цели с первого и второго выходов соответствующих каналов преобразователя 9 поступают соответственно на первый и второй входы блока формирования сигнала компенсации динамической ошибки 2 в соответствующем канале управления ракетой по тангажу и курсу. В блоке 2 формируется, в соответствии с соотношением (4), сигнал компенсации динамической ошибки наведения ракеты, который с выхода блока поступает на второй вход сумматора 5 и далее на ракету.
цели с первого и второго выходов соответствующих каналов преобразователя 9 поступают соответственно на первый и второй входы блока формирования сигнала компенсации динамической ошибки 2 в соответствующем канале управления ракетой по тангажу и курсу. В блоке 2 формируется, в соответствии с соотношением (4), сигнал компенсации динамической ошибки наведения ракеты, который с выхода блока поступает на второй вход сумматора 5 и далее на ракету.
Прямоугольные координаты цели xц, yц, zц с выхода преобразователя 8 поступают также на входы соответственно первого, второго и третьего дифференцирующе-сглаживающих фильтров 27, 28, 29, где осуществляется выработка сглаженных линейных ускорений цели  для определения вида движения цели. Алгоритм дифференцирующе-сглаживающего фильтра описывается соотношениями, например, аналогичными (9), с выходом по сигналу сглаженного ускорения, в которых коэффициенты сглаживания k1, k2, k3 задаются постоянными величинами одного уровня, такими, чтобы обеспечивалась полоса пропускания фильтра для формирования сигнала линейного ускорения цели, в том числе и маневрирующей, изменяющегося в ожидаемом диапазоне частот возможной перегрузки маневра цели. Выработанные сигналы управляющих линейных ускорений с выходов дифференцирующе-сглаживающих фильтров 27, 28, 29 поступают в блоки выработки модуля 23 соответственно первого, второго и третьего блоков формирования линейных координаты, скорости и ускорения цели 10, 11, 12, а затем с блока 23 сигнал модуля ускорения поступает на первый вход порогового устройства 24, на второй вход которого с задатчика опорного сигнала 25 поступает сигнал, несущий пороговое значение линейного ускорения, ниже которого сопровождаемая цель для системы наведения считается неманеврирующей. В зависимости от соотношения величин модуля оцененного линейного ускорения цели и опорного сигнала вырабатывается сигнал управления, поступающий на первый вход управляемого коммутатора 26. На второй, четвертый и шестой входы, связанные с нормально замкнутыми контактами, управляемого коммутатора 26 поступают с выходов соответственно первого, третьего и пятого блоков коэффициентов 14, 16, 18 сигналы, несущие значения коэффициентов линейного фильтра с регулируемой полосой пропускания 13 для формирования сигналов линейных координаты, скорости и ускорения неманеврирующей цели. На третий, пятый и седьмой входы, связанные с нормально разомкнутыми контактами, управляемого коммутатора 26 поступают с выходов соответственно второго, четвертого и шестого блоков коэффициентов 15, 17, 19 сигналы, несущие значения коэффициентов линейного фильтра с регулируемой полосой пропускания 13 для формирования сигналов линейных координаты, скорости и ускорения маневрирующей цели.
для определения вида движения цели. Алгоритм дифференцирующе-сглаживающего фильтра описывается соотношениями, например, аналогичными (9), с выходом по сигналу сглаженного ускорения, в которых коэффициенты сглаживания k1, k2, k3 задаются постоянными величинами одного уровня, такими, чтобы обеспечивалась полоса пропускания фильтра для формирования сигнала линейного ускорения цели, в том числе и маневрирующей, изменяющегося в ожидаемом диапазоне частот возможной перегрузки маневра цели. Выработанные сигналы управляющих линейных ускорений с выходов дифференцирующе-сглаживающих фильтров 27, 28, 29 поступают в блоки выработки модуля 23 соответственно первого, второго и третьего блоков формирования линейных координаты, скорости и ускорения цели 10, 11, 12, а затем с блока 23 сигнал модуля ускорения поступает на первый вход порогового устройства 24, на второй вход которого с задатчика опорного сигнала 25 поступает сигнал, несущий пороговое значение линейного ускорения, ниже которого сопровождаемая цель для системы наведения считается неманеврирующей. В зависимости от соотношения величин модуля оцененного линейного ускорения цели и опорного сигнала вырабатывается сигнал управления, поступающий на первый вход управляемого коммутатора 26. На второй, четвертый и шестой входы, связанные с нормально замкнутыми контактами, управляемого коммутатора 26 поступают с выходов соответственно первого, третьего и пятого блоков коэффициентов 14, 16, 18 сигналы, несущие значения коэффициентов линейного фильтра с регулируемой полосой пропускания 13 для формирования сигналов линейных координаты, скорости и ускорения неманеврирующей цели. На третий, пятый и седьмой входы, связанные с нормально разомкнутыми контактами, управляемого коммутатора 26 поступают с выходов соответственно второго, четвертого и шестого блоков коэффициентов 15, 17, 19 сигналы, несущие значения коэффициентов линейного фильтра с регулируемой полосой пропускания 13 для формирования сигналов линейных координаты, скорости и ускорения маневрирующей цели.
Если сигнал линейного ускорения цели по какой-либо прямоугольной координате цели, определенный в соответствующих дифференцирующе-сглаживающих фильтрах 27, 28, 29, по модулю не превышает опорный сигнал ("Цель неманеврирующая"), то с порогового устройства 24 на командный вход управляемого коммутатора 26 поступает запирающий сигнал и тогда через нормально замкнутые контакты управляемого коммутатора 27 и далее с его первого, второго и третьего выходов поступают соответственно через первое, второе и третье инерционные звенья 20, 21, 22 соответственно на второй, третий и четвертый управляемые входы линейного фильтра с регулируемой полосой 13 значения коэффициентов сглаживания k1, k2, k3, определяющие его полосу пропускания для формирования сигналов линейных координаты, скорости и ускорения неманеврирующей цели для выработки сигнала компенсации динамической ошибки наведения ракеты.
Если сигнал линейного ускорения цели, определенный в соответствующих фильтрах 27, 28, 29, по модулю превышает опорный сигнал ("Цель маневрирующая)", то сигнал на выходе порогового устройства 24 меняет свое состояние, которое, управляя командным входом управляемого коммутатора 26, размыкает его нормально замкнутые контакты и замыкает нормально разомкнутые. При этом через замкнутые контакты и далее с его первого, второго и третьего выходов поступают соответственно через первое, второе и третье инерционные звенья 20, 21, 22 соответственно на второй, третий и четвертый управляемые входы линейного фильтра с регулируемой полосой 13 значения коэффициентов k1, k2, k3, определяющих его полосу пропускания для формирования сигналов линейных координаты, скорости и ускорения маневрирующей цели для выработки сигнала компенсации динамической ошибки наведения ракеты.
Инерционные звенья 20, 21, 22 необходимы для исключения скачкообразного переходного процесса изменения полосы пропускания линейного фильтра 13 при переключении значений его коэффициентов сглаживания после обнаружения (или не подтверждения) маневра цели в процессе наведения ракеты. В качестве инерционных звеньев могут использоваться, например, звенья с передаточными функциями вида
W(p)=1/(Тир+1), (11)
где Ти - постоянная времени.
Таким образом, система обеспечивает компенсацию динамической ошибки теленаведения ракеты независимо от вида и параметров движения цели при минимизации флуктуационной составляющей ошибки, что и обеспечивает высокую точность наведения.
Итак, предлагаемая система позволяет повысить точность наведения телеуправляемой ракеты на цель, в том числе и на маневрирующую, что выгодно отличает ее от известных.
Источники информации
1. А.А. Лебедев, В.А. Карабанов. Динамика систем управления беспилотными летательными аппаратами. М.: "Машиностроение", 1965.
2. Ю.Х. Вермишев. Основы управления ракетами. М.: Воениздат, 1968.
3. А.М. Батков, И.Б. Тарханов. Системы телеуправления. М.: "Машиностроение", 1972.
4. Под ред. В.В. Григорина-Рябова. Радиолокационные устройства. М.: Советское радио, 1970.
5. И. М. Тетельбаум, Ю.Р. Шнейдер. Практика аналогового моделирования динамических систем. М.: Энергоатомиздат, 1987.
6. Под ред. Е.А. Федосова. Динамическое проектирование систем управления автоматических летательных аппаратов. М.: "Машиностроение", 1997.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КОМАНДНОГО ТЕЛЕУПРАВЛЕНИЯ РАКЕТОЙ | 2000 |
|
RU2188381C2 |
| СПОСОБ НАВЕДЕНИЯ ТЕЛЕУПРАВЛЯЕМОЙ РАКЕТЫ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1996 |
|
RU2106597C1 |
| СПОСОБ ИСПЫТАНИЯ ТЕЛЕУПРАВЛЯЕМОЙ РАКЕТЫ | 2000 |
|
RU2190184C2 |
| СПОСОБ НАВЕДЕНИЯ ТЕЛЕУПРАВЛЯЕМОЙ РАКЕТЫ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2004 |
|
RU2260162C1 |
| СПОСОБ НАВЕДЕНИЯ РАКЕТЫ | 2009 |
|
RU2426969C2 |
| СПОСОБ НАВЕДЕНИЯ ТЕЛЕУПРАВЛЯЕМОЙ РАКЕТЫ | 2010 |
|
RU2437052C1 |
| ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА УПРАВЛЕНИЯ | 2000 |
|
RU2172010C1 |
| СИСТЕМА СОПРОВОЖДЕНИЯ | 2000 |
|
RU2197002C2 |
| СЛЕДЯЩАЯ СИСТЕМА | 2003 |
|
RU2252435C2 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛОВ УПРАВЛЕНИЯ РАКЕТОЙ | 2009 |
|
RU2413918C1 |
Изобретение относится к ракетной технике и может использоваться в комплексах вооружения телеуправляемых ракет. Технический результат - повышение точности наведения. В систему наведения телеуправляемой ракеты, состоящей из пеленгатора цели, первого и второго дифференцирующе-сглаживающих фильтров и контура управления ракетой по тангажу и курсу, включающего блок формирования сигнала компенсации динамической ошибки, введены преобразователь координат из сферической системы координат в прямоугольную, преобразователь координат из прямоугольной системы координат в сферическую, третий дифференцирующе-сглаживающий фильтр, первый, второй и третий блоки формирования сигналов линейных координат, скорости и ускорения цели, каждый из которых содержит линейный фильтр с регулируемой полосой пропускания, первый, второй, третий, четвертый, пятый и шестой блоки коэффициентов, первый, второй и третий инерционные звенья, последовательно соединенные блок выделения модуля, пороговое устройство и управляемый коммутатор. Причем второй, третий, четвертый, пятый, шестой и седьмой входы его подключены соответственно к выходам первого, второго, третьего, четвертого, пятого и шестого блоков коэффициентов, первый, второй и третий выходы управляемого коммутатора соединены соответственно через первое, второе и третье инерционные звенья со вторым, третьим и четвертым входами линейного фильтра с регулируемой полосой пропускания. Первый, второй и третий входы преобразователя координат из сферической системы в прямоугольную подключены соответственно к первому, второму и третьему выходам пеленгатора цели, первый и второй выходы преобразователя координат из прямоугольной системы координат в сферическую соединены в соответствующем канале управления соответственно с первым и вторым входами блока формирования сигнала компенсации динамической ошибки. Первые входы линейных фильтров с регулируемой полосой пропускания подключены соответственно к первому, второму и третьему выходам преобразователя координат из сферической системы координат в прямоугольную, а первые, вторые и третьи выходы их соединены соответственно с первыми, вторыми и третьими входами соответствующего канала преобразователя координат из прямоугольной системы координат в сферическую, при этом входы первого, второго и третьего дифференцирующе-сглаживающих фильтров подключены соответственно к первым входам линейных фильтров с регулируемой полосой пропускания, а выходы соединены соответственно с входами блоков выделения модуля соответственно первого, второго и третьего блоков формирования сигналов линейных координаты, скорости и ускорения. 1 ил.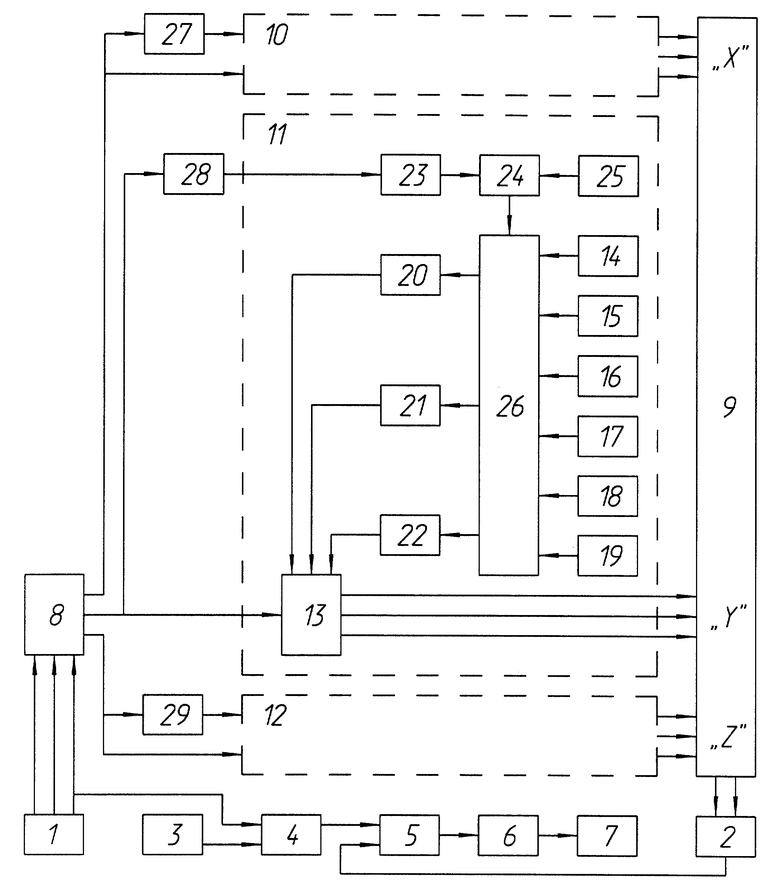
Система наведения телеуправляемой ракеты, состоящая из пеленгатора цели, первого и второго дифференцирующе-сглаживающих фильтров и контура управления ракетой, включающего в каждом канале управления по тангажу и курсу блок формирования сигнала компенсации динамической ошибки, последовательно соединенные пеленгатор ракеты, блок формирования команды управления, пропорциональной линейному рассогласованию между ракетой и опорной траекторией наведения, второй вход которого подключен к соответствующему выходу пеленгатора цели, сумматор, второй вход которого подключен к выходу блока формирования сигнала компенсации динамической ошибки, устройство передачи команд управления на ракету, отличающаяся тем, что в нее введены преобразователь координат из сферической системы координат в прямоугольную, преобразователь координат из прямоугольной системы координат в сферическую, третий дифференцирующе-сглаживающий фильтр, первый, второй и третий блоки формирования сигналов линейных координаты, скорости и ускорения цели, каждый из которых содержит линейный фильтр с регулируемой полосой пропускания, первый, второй, третий, четвертый, пятый и шестой блоки коэффициентов, первый, второй и третий инерционные звенья, последовательно соединенные блок выделения модуля, пороговое устройство, второй вход которого подключен к задатчику опорного сигнала, и управляемый коммутатор, причем второй, третий, четвертый, пятый, шестой и седьмой входы управляемого коммутатора подключены соответственно к выходам первого, второго, третьего, четвертого, пятого и шестого блоков коэффициентов, первый, второй и третий выходы управляемого коммутатора соединены соответственно с входами первого, второго и третьего инерционных звеньев, выходы которых соединены соответственно со вторым, третьим и четвертым входами линейного фильтра с регулируемой полосой пропускания, а первый, второй и третий входы преобразователя координат из сферической системы координат в прямоугольную подключены соответственно к первому, второму и третьему выходам пеленгатора цели, первый и второй выходы преобразователя координат из прямоугольной системы координат в сферическую соединены в соответствующем канале управления соответственно с первым и вторым входами блока формирования сигнала компенсации динамической ошибки, первые входы линейных фильтров с регулируемой полосой пропускания соответственно первого, второго и третьего блоков формирования сигналов линейных координат, скорости и ускорения цели подключены соответственно к первому, второму и третьему выходам преобразователя координат из сферической системы координат в прямоугольную, а первые, вторые и третьи выходы их соединены соответственно с первыми, вторыми и третьими входами соответствующего канала преобразователя координат из прямоугольной системы координат в сферическую, при этом входы первого, второго и третьего дифференцирующе-сглаживающих фильтров подключены соответственно к первым входам линейных фильтров с регулируемой полосой пропускания, а выходы соединены соответственно с входами блоков выделения модуля соответственно первого, второго и третьего блоков формирования сигналов линейных координаты, скорости и ускорения.
| ЛЕБЕДЕВ А.А | |||
| Динамика систем управления беспилотными летательными аппаратами | |||
| - М.: Машиностроение, 1965, с | |||
| Дальномер | 1922 |
|
SU379A1 |
| СПОСОБ НАВЕДЕНИЯ ТЕЛЕУПРАВЛЯЕМОЙ РАКЕТЫ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1996 |
|
RU2106597C1 |
| US 5042742, 27.08.1991 | |||
| Опорная часть строительной конструкции (варианты) | 2017 |
|
RU2655721C1 |

