Изобретение относится к радиолокационной технике и может использоваться для обеспечения безопасных полетов вертолетов, а именно для предупреждения их столкновений с высоковольтными линиями электропередач.
Известен способ предотвращения столкновений вертолета с высоковольтными линиями электропередач, заключающийся в том, что принимают электромагнитные колебания с помощью приемного устройства, размещаемого на вертолете, прием электромагнитных колебаний осуществляют в диапазоне радиоволн, излучаемых высоковольтными линиями электропередач, при этом прием излучаемых высоковольтными линиями электропередач электромагнитных колебаний ведут с различных направлений с помощью нескольких приемных антенн, максимумы диаграмм направленности которых ориентированы в разных угловых секторах плоскости полета вертолета, и по наличию сигнала в одной из приемных антенн определяют угловое положение проводов высоковольтной линии электропередач относительно корпуса вертолета, сравнивают значения принятого сигнала с опорными напряжениями, соответствующими величинам напряженности электромагнитного поля, излучаемого высоковольтной линией электропередачи на известном расстоянии от нее, и по результатам сравнения принимают решение по корректировке направления полета вертолета (Патент РФ на изобретение №2156985, G01S 13/93, G08G 5/04, опубл. 27.09.2000).
Недостатками данного способа предотвращения столкновений вертолета с высоковольтными линиями электропередач является зависимость результатов измерения от погодных условий. Так, уровни напряженности электромагнитного поля, излучаемого линией электропередач, вызванные высокочастотными переходными процессами, могут быть на 10-20 дБ больше при высокой влажности, тумане или дожде, чем при сухой погоде (Дональд Р.Ж. Уайт. Электромагнитная совместимость радиоэлектронных средств и непреднамеренные помехи. Выпуск 1. Общие вопросы ЭМС. Межсистемные помехи. М., Советское радио, 1977), в результате чего при обработке сигнала растет ошибка определения кратчайшего расстояния до линии электропередач. Кроме того, способ не работоспособен при выключении напряжения в линии электропередач. Способ не учитывает ошибку, вызванную влиянием ветра на направление полета вертолета.
Технической задачей изобретения является устранение указанных недостатков.
Технический результат изобретения достигается тем, что в способе предотвращения столкновений вертолета с высоковольтными линиями электропередач, заключающемся в том, что осуществляют прием сигналов в диапазоне радиоволн, дополнительно излучение и прием осуществляют первым и вторым пеленгаторами, установленными на вертолете и расположенными по фронту на расстоянии Б друг от друга, каждый из пеленгаторов сканирует пространство по направлению полета вертолета, причем первый пеленгатор осуществляет сканирование против часовой стрелки, а второй - по часовой стрелке, определяют углы пеленга каждой из двух опор линии электропередач каждым пеленгатором, причем α1 и α2 - углы пеленга, определяемые первым пеленгатором первой и второй опор линии электропередач, а β1 и β2 - углы пеленга, определяемые вторым пеленгатором первой и второй опор линии электропередач относительно строительной оси вертолета, определяют дальность до проводов линии электропередач по направлению строительной оси вертолета из выражения:

где Б - расстояние между пеленгаторами, µ - угол между линией электропередач и строительной осью вертолета,
определяют дальность до проводов линии электропередач по направлению строительной оси вертолета с учетом скорости ветра из выражения:
где αсн - угол сноса (угол между плоскостью курса и плоскостью пути),
исходя из значения дальности, принимают решение по корректировке направления полета вертолета.
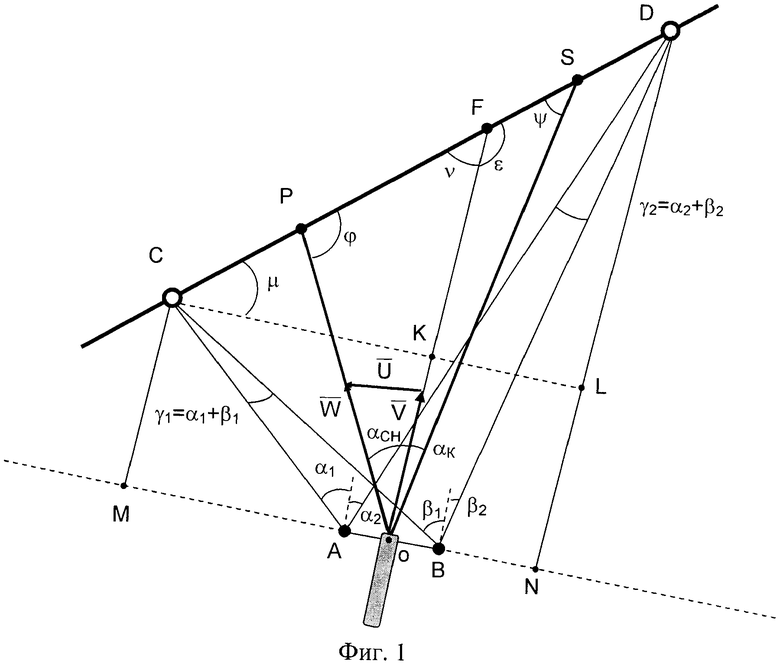
На фиг.1 представлена схема дополнительных построений для вывода формулы определения расстояния до линии электропередач, где:
CD - высоковольтная линия электропередач;
С - точка размещения первой опоры линии электропередач;
D - точка размещения второй опоры линии электропередач;
А - точка размещения первого пеленгатора;
В - точка размещения второго пеленгатора.
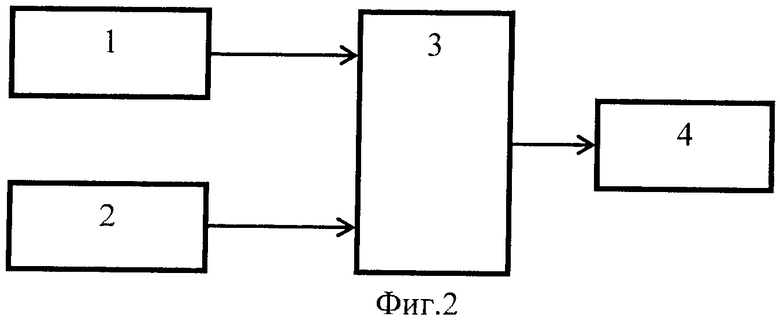
Для пояснения предлагаемого способа как процесса выполнения действий над материальным объектом с помощью материальных средств и подтверждения возможности осуществления заявляемого изобретения, на фиг.2 представлена функциональная схема устройства для реализации способа предотвращения столкновений вертолета с высоковольтными линиями электропередач, где 1, 2 - пеленгаторы; 3 - вычислитель; 4 - индикатор.
Устройство для предотвращения столкновений вертолета с высоковольтными линиями электропередач содержит последовательно соединенные первый 1 пеленгатор, вычислитель 3 и индикатор 4, причем второй вход вычислителя 3 соединен с выходом второго 2 пеленгатора.
В качестве первого 1 и второго 2 пеленгаторов могут быть использованы радиолокационные сканирующие пеленгаторы, осуществляющие излучение и прием электромагнитной энергии и выдающие на выходе пеленг обнаруженного объекта.
Устройство работает следующим образом.
На фиг.1 в точках С и D расположены опоры линии электропередач (ЛЭП). Прямая, проходящая через указанные точки, - провода ЛЭП.
Вертолет находится в точке О и выполняет полет в направлении линии OF. Из чертежа видно, что отрезок OF является дальностью проводов ЛЭП до вертолета - DЛЭП. На вертолете в точках А и В размещены два пеленгатора (радиолокационного типа либо оптико-электронного). Пеленгаторы разнесены друг относительно друга на расстояние АВ, которое обозначим Б.
Каждый из пеленгаторов сканирует пространство, причем пеленгатор, расположенный в точке А, осуществляет сканирование против часовой стрелки, а пеленгатор, расположенный в точке В, - по часовой стрелке. Пеленги объектов - α1, α2, β1, β2, измеряемые пеленгаторами, отсчитываются от линии, проходящей через пеленгатор, которая параллельна строительной оси вертолета.
Правило знаков для пеленгов следующее. Для пеленгатора, расположенного в точке А, пеленг считается положительным, если направление его отсчета совпадает с положительным движением часовой стрелки. На фиг.1 пеленг опоры ЛЭП - D - α2 положителен, пеленг опоры С - α1 отрицателен. Для пеленгатора, расположенного в точке В, пеленг считается положительным, если направление его отсчета совпадает с обратным движением часовой стрелки.
При сканировании пространства пеленгаторами, расположенными в точках А и В, измеряются пеленги опор ЛЭП. Пеленги опоры С - α1, β1, a опоры D - α2, β2. Кроме того, известна база - Б - расстояние между пеленгаторами.
Дальность до проводов ЛЭП по направлению полета летательного аппарата, согласно фиг.1, определим как:

Из фиг.1 видно, что:
γ1=α1+β1
γ2=α2+β2
Рассмотрим определение линейных координат опоры С (СМ и МА) в системе координат, связанной с первым пеленгатором.
Используя теорему синусов, получим:

или

Координата опоры С - СМ определится с учетом формулы (3):
Из фиг.1 видно, что ОК=СМ.
Координата опоры С - МА определится:
Аналогично получим формулы для координат опоры D - DN и BN в системе координат, связанной со вторым пеленгатором:


Угол µ определяет направление ЛЭП по отношению к направлению полета вертолета.
Тангенс этого угла, согласно фиг.1, определяется как:

или


Тогда дальность до проводов ЛЭП будет определяться формулой:

После преобразований получим:

Используя формулу (13), можно определить дальность до проводов ЛЭП в направлении строительной оси вертолета (она лежит в плоскости курса вертолета).
Влияние скорости перемещения воздушных масс (скорость ветра) приводит к тому, что вертолет будет двигаться со скоростью
 ,
,
где  - вектор путевой скорости вертолета,
- вектор путевой скорости вертолета,  - вектор воздушной скорости вертолета,
- вектор воздушной скорости вертолета,  - вектор скорости ветра.
- вектор скорости ветра.
Вектор путевой скорости лежит в плоскости пути вертолета. Предположим, что плоскость пути проходит через линию ОР (фиг.1).
В этом случае вертолет будет перемещаться не вдоль линии OF, a вдоль линии ОР и расстоянием до проводов ЛЭП - D, будет являться отрезок ОР. Рассмотрим треугольник OPF (фиг.1). Используя теорему синусов, получим:
Тогда дальность определится:
Из фиг.1 видно, что


где αсн - угол сноса (угол между плоскостью курса и плоскостью пути).
Угол сноса измеряется бортовыми системами вертолета.
С учетом выражений (16), (17) выражение (15) после преобразований примет вид:
Угол сноса отсчитывается от плоскости курса и считается отрицательным, если направление отсчета совпадает с положительным движением часовой стрелки, и положительным в противном случае.
Угол µ определится с учетом выражения (10) как:

При полете вертолета может возникнуть необходимость определить дальность до проводов ЛЭП при изменении курса на произвольный угол - αк.
Рассмотрим треугольник OFS (фиг.1). Тогда при отсутствии ветра:

После преобразований получим:

Угол αк считается отрицательным, если изменение курса идет в направлении движения часовой стрелки, и положительным в противном случае.
Если скорость ветра не равна нулю, то дальность определится как:

Способ позволяет осуществлять измерение дальности до проводов ЛЭП по направлению полета объекта с учетом скорости ветра.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЙ ВЕРТОЛЕТА С ВЫСОКОВОЛЬТНЫМИ ЛИНИЯМИ ЭЛЕКТРОПЕРЕДАЧ | 2008 |
|
RU2403591C2 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЙ ВЕРТОЛЕТА С ВЫСОКОВОЛЬТНЫМИ ЛИНИЯМИ ЭЛЕКТРОПЕРЕДАЧ | 2009 |
|
RU2410720C1 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЙ ВЕРТОЛЕТА С ВЫСОКОВОЛЬТНЫМИ ЛИНИЯМИ ЭЛЕКТРОПЕРЕДАЧ | 2009 |
|
RU2410718C2 |
| УСТРОЙСТВО ДЛЯ ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЙ ВЕРТОЛЕТА С ВЫСОКОВОЛЬТНЫМИ ЛИНИЯМИ ЭЛЕКТРОПЕРЕДАЧИ | 2010 |
|
RU2441254C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ОПОРЫ ЛИНИИ ЭЛЕКТРОПЕРЕДАЧ | 2011 |
|
RU2472177C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ РАССТОЯНИЯ МЕЖДУ ВОЗДУШНЫМИ СУДАМИ | 2012 |
|
RU2510800C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ОПОРЫ ЛИНИИ ЭЛЕКТРОПЕРЕДАЧ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2410709C1 |
| УСТРОЙСТВО ЗАЩИТЫ ЛИНИИ ЭЛЕКТРОПЕРЕДАЧ | 2009 |
|
RU2416850C1 |
| СПОСОБ ФОРМИРОВАНИЯ ПРИЕМНЫХ ДИАГРАММ НАПРАВЛЕННОСТИ МОНОИМПУЛЬСНОЙ АНТЕННОЙ СИСТЕМЫ И МОНОИМПУЛЬСНАЯ АНТЕННАЯ СИСТЕМА | 2006 |
|
RU2316860C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ И НАПРАВЛЕНИЯ ВЕТРА В НИЖНИХ СЛОЯХ АТМОСФЕРЫ | 2006 |
|
RU2339980C2 |
Изобретение относится к радиолокационной технике и может использоваться для предупреждения столкновений вертолетов с высоковольтными линиями передач. Сущность изобретения заключается в приеме электромагнитных колебаний, отраженных от опор линии передачи электроэнергии в диапазоне радиоволн первым и вторым пеленгаторами, размещенными на вертолете и расположенными по фронту на расстоянии Б друг от друга, каждый из пеленгаторов сканирует пространство по направлению полета вертолета, причем первый пеленгатор осуществляет сканирование против часовой стрелки, а второй - по часовой стрелке, определяют углы пеленга каждой из двух опор линии электропередач каждым пеленгатором, причем α1 и α2 - углы пеленга, определяемые первым пеленгатором первой и второй опор линии электропередач, a β1 и β2 - углы пеленга, определяемые вторым пеленгатором первой и второй опор линии электропередач относительно строительной оси вертолета, определяют дальность до проводов линии электропередач по направлению строительной оси вертолета из выражения
 где Б - расстояние между пеленгаторами, µ - угол между линией электропередач и строительной осью вертолета, определяют дальность до проводов линии электропередач по направлению строительной оси вертолета с учетом скорости ветра из выражения:
где Б - расстояние между пеленгаторами, µ - угол между линией электропередач и строительной осью вертолета, определяют дальность до проводов линии электропередач по направлению строительной оси вертолета с учетом скорости ветра из выражения: 
где αсн - угол сноса (угол между плоскостью курса и плоскостью пути), исходя из значения дальности, принимают решение по корректировке направления полета вертолета. Достигаемым техническим результатом изобретения является повышение надежности обеспечения предотвращения столкновений вертолета с линиями электропередач. 2 ил.
Способ предотвращения столкновений вертолета с высоковольтными линиями электропередач, заключающийся в том, что осуществляют прием сигналов в диапазоне радиоволн, отличающийся тем, что излучение и прием осуществляют первым и вторым пеленгаторами, установленными на вертолете и расположенными по фронту на расстоянии Б друг от друга, каждый из пеленгаторов сканирует пространство по направлению полета вертолета, причем первый пеленгатор осуществляет сканирование против часовой стрелки, а второй - по часовой стрелке, определяют углы пеленга каждой из двух опор линии электропередач каждым пеленгатором, причем α1 и α2 - углы пеленга, определяемые первым пеленгатором, первой и второй опор линии электропередач, a β1 и β2 - углы пеленга, определяемые вторым пеленгатором, первой и второй опор линии электропередач относительно строительной оси вертолета, определяют дальность до проводов линии электропередач по направлению строительной оси вертолета из выражения
 , Б - расстояние между пеленгаторами, µ - угол между линией электропередач и строительной осью вертолета, определяют дальность до проводов линии электропередач по направлению строительной оси вертолета с учетом скорости ветра из выражения
, Б - расстояние между пеленгаторами, µ - угол между линией электропередач и строительной осью вертолета, определяют дальность до проводов линии электропередач по направлению строительной оси вертолета с учетом скорости ветра из выражения
 ,
,
где αСН - угол сноса (угол между плоскостью курса и плоскостью пути), исходя из значения дальности принимают решение по корректировке направления полета вертолета.
| СПОСОБ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЙ ВЕРТОЛЕТА С ВЫСОКОВОЛЬТНЫМИ ЛИНИЯМИ ЭЛЕКТРОПЕРЕДАЧ | 1998 |
|
RU2156985C2 |
| УСТРОЙСТВО ДЛЯ ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЯ ВЕРТОЛЕТА С ВЫСОКОВОЛЬТНЫМИ ЛИНИЯМИ ЭЛЕКТРОПЕРЕДАЧ | 2007 |
|
RU2326407C1 |
| СПОСОБ ФУНКЦИОНИРОВАНИЯ ИНФОРМАЦИОННО-ВЫЧИСЛИТЕЛЬНОЙ СИСТЕМЫ РАКЕТЫ ПРИ НАВЕДЕНИИ НА ЦЕЛЬ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2311605C2 |
| МНОГОФУНКЦИОНАЛЬНЫЙ РАДИОЛОКАТОР | 2006 |
|
RU2315334C1 |
| US 5874917 A, 23.02.1999 | |||
| WO 03091967 A1, 06.11.2003 | |||
| WO 03005058 B1, 19.06.2003. | |||

