Изобретение относится к области авиационной техники, а именно к бортовым системам предотвращения столкновения с землей, сигнализирующим пилоту об угрозе такого столкновения. Способ предназначен для вертолетов, винтокрылых ЛА, а также для аэростатических ЛА, а именно для ЛА, способных зависать или двигаться в любом направлении как с большой, так и с незначительной скоростью.
Известен способ предупреждения столкновения ЛА с землей и устройство на его основе по патенту РФ № RU 2262746 С1, МПК 7 G08G 5/04, опубл. 20.10.2005 (www.fips.ru). Известный способ заключается в том, что определяют местоположение ЛА с помощью навигационной системы, производят вычисление параметров текущего динамического состояния ЛА, вычисляют прогнозируемую траекторию, формируют плановую проекцию рельефа, определяют опасный рельеф и предупреждают об опасности путем сигнализации и видеоотображения опасного рельефа.
Указанные способ и устройство предназначены для использования на ЛА самолетного типа, движущихся со значительными скоростями, и неприменим, если вертолет находится в режиме висения или перемещается с малой скоростью.
Известен способ обнаружения и предупреждения угрозы столкновения ВС с препятствиями подстилающей поверхности по патенту РФ №2297047 А, МПК 7 G08G 5/04, опубл. 03.08.2005 (www.fips.ru). Известный способ заключается в том, что предварительно формируют базу данных рельефа подстилающей поверхности, аэронавигационную базу данных, базу данных летно-технических характеристик ВС. Вычисляют границы защитных зон, включающих зону внимания (ЗВ) и зону управления (ЗУ) на всех этапах полета ВС. Корректируют границы защитных зон при маневрировании ВС в зависимости от величины вертикальной скорости, угловой скорости разворота, а также при изменении скорости ветра. Выделяют препятствия подстилающей поверхности, попавшие в защитные зоны, и определяют их превышения над границами зон. Формируют информационные и управляющие сигналы экипажу ВС с последующей их индикацией.
Недостаток данного аналога состоит в том, что конструкция ЗУ и ЗВ не учитывает маневренные особенности винтокрылых машин, такие как выполнение маневров в вертикальной и горизонтальной плоскости с изменением скорости вплоть до нулевых значений, например в режимах висения и вертикального взлета и посадки.
Наиболее близким по своей технической сущности к заявленному является известный способ отображения земной поверхности для винтокрылых ЛА («Method, apparatus and computer program product for displaying terrain in rotary wing aircraft») по патенту № US 6833797 B2, МПК G08B 21/00 от 21.12.2004 (http://v3.espacenet.com).
Способ-прототип заключается в отображении элементов рельефа на дисплее внутрикабинного индикатора винтокрылых ЛА различными цветами, соответствующими степени угрозы, которую представляют указанные элементы рельефа. Для определения степени угрозы проверяют попадание элементов рельефа в защитные зоны: предупреждения и повышенного внимания, которые формируют вокруг ВС. Структура данных зон неизменяема, а размеры в вертикальной и продольной плоскостях зависят от ряда параметров: путевой скорости, высоты полета, удаленности от взлетно-посадочной полосы (ВПП), угла наклона траектории ВС.
Существенный недостаток способа-прототипа состоит в том, что конструкция зоны предупреждения принята такой, что ее ближайшая граница находится на вертикальной линии, проходящей через центр вертолета, а расстояние до дальней границы пропорционально путевой скорости. При малой путевой скорости, а именно менее 40 узлов, продольный размер зон остается постоянным и равным предустановленному значению, что делает невозможным эффективное использование способа-прототипа в режиме висения и перемещения вертолета с малой скоростью. Недостаток указанного способа заключается также в его малой информативности.
Заявленное техническое решение расширяет арсенал средств данного предназначения.
Целью изобретения является разработка способа предотвращения столкновения вертолета с элементами рельефа и наземными искусственными препятствиями при полете с любой путевой скоростью на всех режимах полета, включая висение, и с учетом динамических характеристик и особенностей винтокрылых машин.
Поставленная цель достигается тем, что в известном способе предупреждения угрозы столкновения вертолета с наземными препятствиями предварительно формируют базу данных рельефа (БДР) подстилающей поверхности, аэронавигационную базу данных (АНБД), базу данных летно-технических характеристик вертолета (БД ЛТХ). В процессе полета выделяют наземные препятствия, представляющие угрозу столкновения с ними вертолета, вычисляют с учетом всех выделенных препятствий одну или более траектории полета, исключающие угрозу столкновения вертолета с экстремальным из числа выделенных препятствий, рассчитывают параметры уклонения вертолета от препятствия, генерируют электрические сигналы управления, которые отображают с помощью средств индикации. В процессе полета вычисляют границы последовательно примыкающих к друг другу зон столкновения (ЗС), ЗУ и ЗВ. Зона столкновения представляет собой область пространства, внутри которой находится вертолет, ограниченная поверхностью второго порядка, размеры которой выбирают в зависимости от этапа и режима полета. К ЗС непосредственно примыкает ЗУ, ограниченная поверхностями, касательными к ЗС, причем размеры ЗУ вычисляют в зависимости от прогнозируемых параметров движения. ЗВ по своим размерам превосходит ЗУ. Из числа наземных препятствий выделяют препятствия, попавшие в зоны, причем траектории полета и параметры уклонения вертолета, исключающие столкновение вертолета с препятствиями, вычисляют с учетом всех препятствий, находящихся в ЗУ. В соответствии с значениями вычисленных параметров уклонения генерируют электрические сигналы управления, которые являются командами по изменению высоты полета, а также путевого угла и путевой скорости. Дополнительно для всех зон генерируют информационные сигналы о находящихся в этих зонах препятствиях, причем эти сигналы отображают на экране внутрикабинного индикатора.
Новым также является то, что ЗС представляет собой цилиндр, центр которого совпадает с центром масс вертолета. Вертикальное сечение ЗУ ограничивают снизу ломаной прямой, состоящей не менее чем из трех сопрягающихся участков. Первый начинается в точке касания к ЗС, противоположной направлению движения, располагается под прогнозируемым углом наклона траектории и имеет протяженность, пропорциональную величине прогнозируемой земной скорости. Второй участок горизонтальный и состоит из двух частей, причем первая имеет длину, равную диаметру ЗС, а вторая пропорциональна величине прогнозируемой путевой скорости. Третий участок имеет наклон, соответствующий углу наклона траектории с максимальной установившейся скоростью набора высоты при текущей путевой скорости. Первый и второй участки меняют местами в зависимости от режима полета. Сверху ЗУ ограничена отрезком прямой, начинающимся в верхней точке касания к ЗС, противоположной направлению движения, располагается под углом набора высоты в случае, когда вертолет движется вверх, и горизонтально в остальных случаях. Горизонтальная проекция ЗУ представляет собой сектор, ось которого совпадает с вектором путевой скорости, протяженность определяется размером вертикального сечения, а угол раствора - угловой скоростью разворота.
При попадании препятствий в ЗУ определяют экстремальное препятствие (ЭП), вычисляют безопасную высоту пролета ЭП, задают величину вертикальной скорости в момент прохождения указанного препятствия, для каждого момента времени вычисляют заданные величины вертикальной скорости и высоты пролета, формируют команды управления и индицируют их на экране индикатора.
При выполнении маневра уклонения периодически вычисляют с учетом эксплуатационных ограничений прогнозируемую высоту пролета препятствия, при недостаточном запасе по высоте вычисляют необходимое уменьшение путевой скорости и траекторию торможения с выполнением горки, а при невозможности преодоления препятствия путем выполнения горки вырабатывают команду экстремального торможения и перехода на режим висения.
Для уклонения от одиночного препятствия или компактной группы препятствий выполняют горизонтальный маневр, причем вычисляют требуемые изменения путевого угла, а также диапазоны недопустимых значений путевого угла.
На экране внутрикабинного дисплея отображают данные об элементах рельефа, содержащихся в цифровой модели рельефа, данные об искусственных препятствиях, хранящихся в векторном виде в соответствующей базе данных, высота которых превышает опорную плоскость, параллельную плоскости движения и отстоящую от нее на величину допустимого запаса по высоте. Элементы рельефа и искусственные препятствия, попавшие в ЗУ и в ЗВ, отображают разными цветами, а именно красным и желтым, а ЭП, выделенное в ЗУ, а также все препятствия, попавшие в ЗС, отображают мигающей подсветкой. Также отображают линии динамически меняющихся границ зон столкновения, управления и внимания. Изображение на экране дисплея в режиме висения ориентируют по направлению продольной оси, а в остальных случаях - по направлению вектора путевой скорости.
На экране внутрикабинного дисплея отображают данные с использованием перспективной системы реального трехмерного пространства, причем экранные координаты точек сечения зон управления и внимания, а также положения препятствий вычисляют в виде нелинейных функций реальных координат. Элементы рельефа отображают послойно, причем более удаленные препятствия отображают более темным цветом, а искусственные препятствия отображают в контурном виде.
На экране внутрикабинного дисплея располагают горизонтальные шкалы путевого угла и путевой скорости, вертикальные шкалы высоты и вертикальной скорости, причем на каждой из шкал отображают неподвижные оцифрованные индексы текущих значений путевого угла, путевой скорости, высоты и вертикальной скорости соответственно. Заданные значения указанных параметров изображают в виде подвижных индексов, причем дополнительно отображают разрешенные и запрещенные диапазоны изменения указанных параметров.
Заявленный способ поясняется чертежами, на которых показаны:
фиг.1 - Вертикальное сечение и горизонтальная проекция защитных
зон.
фиг.2 - Изменение конфигурации защитных зон при эволюциях вертолета в вертикальной плоскости.
фиг.3 - Вид экрана дисплея с отображением информации в плане.
фиг.4 - Вид экрана дисплея с отображением информации в трехмерной перспективе.
фиг.5 - Схема устройства, реализующего способ.
Значительный рост численности вертолетного парка, расширение сфер применения вертолетов, разработка и освоение новых типов и модификаций вертолетов требует повышения уровня безопасности, особенно при выполнении полетов вблизи земли, а также в ночное время и в сложных метеоусловиях.
При решении этой задачи необходимо учитывать, что динамика вертолета обладает существенными особенностями, обусловленными наличием несущего и рулевого винтов или соосных несущих винтов. Аэродинамические характеристики и динамические свойства несущего винта, их взаимосвязь с аэродинамическими характеристиками планера, динамическими характеристиками силовой установки, управляющими действиями автопилота и пилота, внешними возмущениями определяют существенные отличия динамики полета вертолета от динамики самолета. Для вертолета характерно значительно большее разнообразие пространственных траекторий и расширение диапазона возможных скоростей вплоть до нулевых на режиме висения.
Системы раннего предупреждения близости земли (СРПБЗ), решающие задачу уклонения от столкновения с препятствиями в управляемом полете, обеспечивают обзор впереди ЛА в пределах предустановленного рабочего пространства и своевременную сигнализацию, если элементы подстилающей поверхности попадают в это пространство. Большинство современных СРПБЗ построены на основе стандарта TSO-C151a «Terrain Awareness And Warning System», разработанного для самолетов. Защитное пространство строится в расчете на движение в ограниченном диапазоне скоростей, когда скорость не может быть меньше минимальной (скорости сваливания). Такие системы малопригодны для использования на вертолетах.
В данном техническом предложении решается задача оптимизации и модернизации рабочего пространства для винтокрылых машин, обладающих большим арсеналом маневров по сравнению с ЛА самолетного типа.
Возможность реализации заявленного способа с достижением указанного технического результата объясняется следующим образом.
На этапе подготовки полета предварительно формируют базы данных.
Для хранения данных о препятствиях земной поверхности используют цифровую модель рельефа, которая представляет собой матрицу высот (Digital Elevation Model). Каждый элемент указанной матрицы является прямоугольником или трапецией, хранит данные о широте, долготе и превышении рельефа над эллипсоидом соответствующей системы координат (П3-90 либо WGS-84).
Данные о домах, кранах, вышках, линиях электропередач (ЛЭП), ВПП и других искусственных сооружениях содержатся в базе данных искусственных препятствий (БД ИП). Данные хранят в векторном виде, что уменьшает размер памяти, необходимой для их хранения, и ускоряет их обработку.
АНБД включает информацию об аэропортах и содержит данные о координатах ВПП, их длинах, прямом и обратном азимутах оси ВПП, а также информацию о схемах захода на посадку и взлета, которые используют для определения этапа и режима полета ЛА.
База данных ЛТХ включает в себя параметры вертолета, такие как взлетная масса, аэродинамические характеристики, ограничения на параметры движения, в том числе на скороподъемность на различных этапах и режимах полета, а также при различных условиях внешней среды. Указанные параметры необходимы для выработки сигналов управления на проведение маневра уклонения ЛА от препятствий земной поверхности на каждом этапе полета.
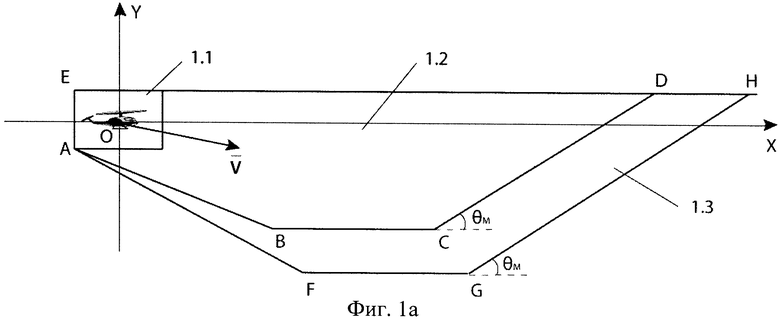
Во время выполнения полета вычисляют границы защитных зон, которые включают ЗС 1.1, ЗУ 1.2 и ЗВ 1.3, показанных на фиг.1 в режиме снижения. Каждая зона представляет собой трехмерную область пространства, границы которой определяют в зависимости от режима и этапа полета следующим образом.
Форму ЗС задают таким образом, что вертолет целиком располагается внутри. Границы ЗС являются поверхностями второго порядка. Учитывая конструкцию вертолета, удобно представлять указанную поверхность в форме цилиндра радиусом rс и высотой 2hc.
Точки изломов границ защитных зон имеют 2 координаты: удаление от вертолета и высоту относительно вертолета. На фиг.1 изображена прямоугольная нормальная подвижная система координат, начало которой т.О совпадает с центром масс вертолета, ось Ох горизонтальна, ось Оу направлена вверх по местной вертикали, а ось Oz им перпендикулярна. При наличии путевой скорости ось Ох совпадает с ее направлением, а в остальных случаях ось Ох ориентируют по направлению продольной оси вертолета.
При расчете границ ЗУ и ЗВ используют следующие параметры:  - прогнозируемая путевая скорость,
- прогнозируемая путевая скорость,  - прогнозируемая скорость изменения геометрической высоты. Величину
- прогнозируемая скорость изменения геометрической высоты. Величину  получают, увеличивая текущую вертикальную скорость Vy на ΔVy - прогнозируемое изменение вертикальной скорости, вызванное влиянием факторов внешней среды,
получают, увеличивая текущую вертикальную скорость Vy на ΔVy - прогнозируемое изменение вертикальной скорости, вызванное влиянием факторов внешней среды,  =Vy+ΔVy. Максимальную величину вертикальной скорости Vymax устанавливают для текущего режима полета и хранят в БД ЛТХ. Величины t1 и t2 - временные параметры, которые выбирают исходя из требований по безопасному маневрированию при обнаружении в ЗУ препятствий с рекомендуемыми параметрами уклонения. Время t1=t0+tв, где t0 - время запаздывания, а именно интервал времени от момента входа препятствия в ЗУ до момента начала маневра уклонения, tB - время выравнивания; t2 - время переходного процесса, а именно выхода на установившеюся скорость набора высоты Vymax. Временные параметры ЗВ t3 и t4 выбирают с запасом, причем t3>t1, а время t4>t2. Параметр θМ - угол наклона нижней границы зон управления и внимания.
=Vy+ΔVy. Максимальную величину вертикальной скорости Vymax устанавливают для текущего режима полета и хранят в БД ЛТХ. Величины t1 и t2 - временные параметры, которые выбирают исходя из требований по безопасному маневрированию при обнаружении в ЗУ препятствий с рекомендуемыми параметрами уклонения. Время t1=t0+tв, где t0 - время запаздывания, а именно интервал времени от момента входа препятствия в ЗУ до момента начала маневра уклонения, tB - время выравнивания; t2 - время переходного процесса, а именно выхода на установившеюся скорость набора высоты Vymax. Временные параметры ЗВ t3 и t4 выбирают с запасом, причем t3>t1, а время t4>t2. Параметр θМ - угол наклона нижней границы зон управления и внимания.
Границы вертикальных сечений ЗУ и ЗВ рассчитывают по формулам (см. фиг.1а):
На фиг.1a показано вертикальное сечение зон в случае снижения  Отрезок АВ в точке касания к ЗС, противоположной направлению движения, имеет наклон, равный углу наклона прогнозируемого снижения. В случае неблагоприятных погодных условий или плохой видимости угол наклона АВ увеличивают на несколько градусов. Проекция отрезка АВ на ось Ох равна величине снижения с прогнозируемой скоростью за заданное время t1. Второй участок ВС расположен горизонтально, его длина складывается из суммы диаметра ЗС 2rc и произведения прогнозируемой путевой скорости
Отрезок АВ в точке касания к ЗС, противоположной направлению движения, имеет наклон, равный углу наклона прогнозируемого снижения. В случае неблагоприятных погодных условий или плохой видимости угол наклона АВ увеличивают на несколько градусов. Проекция отрезка АВ на ось Ох равна величине снижения с прогнозируемой скоростью за заданное время t1. Второй участок ВС расположен горизонтально, его длина складывается из суммы диаметра ЗС 2rc и произведения прогнозируемой путевой скорости  на время t2. Отрезок CD имеет наклон θМ и оканчивается в точке D - точке пересечения CD с верхней границей ЗУ, и определяет протяженность ЗУ. Отрезок прямой ED, являющийся верхней границей ЗУ, начинается в верхней точке касания к ЗС, противоположной направлению движения, и расположен горизонтально.
на время t2. Отрезок CD имеет наклон θМ и оканчивается в точке D - точке пересечения CD с верхней границей ЗУ, и определяет протяженность ЗУ. Отрезок прямой ED, являющийся верхней границей ЗУ, начинается в верхней точке касания к ЗС, противоположной направлению движения, и расположен горизонтально.
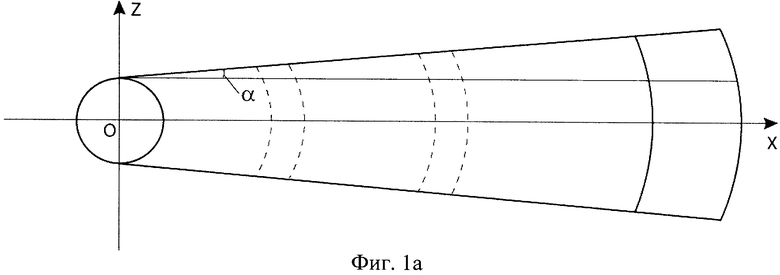
Горизонтальная проекция зон показана на фиг.1б. Угол раствора боковых границ α характеризует непостоянство выдерживания курса и составляет несколько градусов при прямолинейном полете в простых условиях. При сложных условиях полета угол α расширяют с обеих сторон, а при выполнении разворота - дополнительно в сторону разворота.
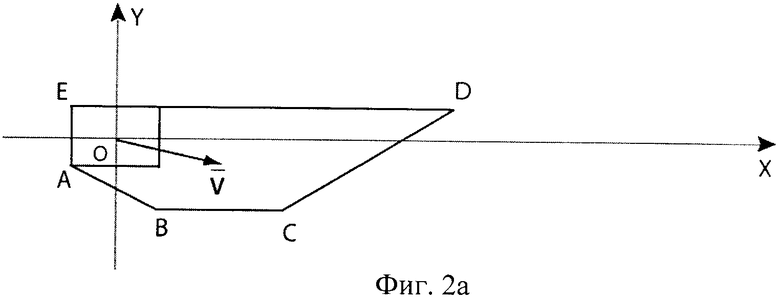
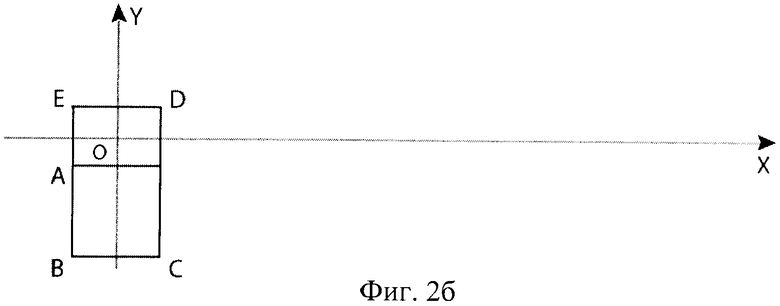
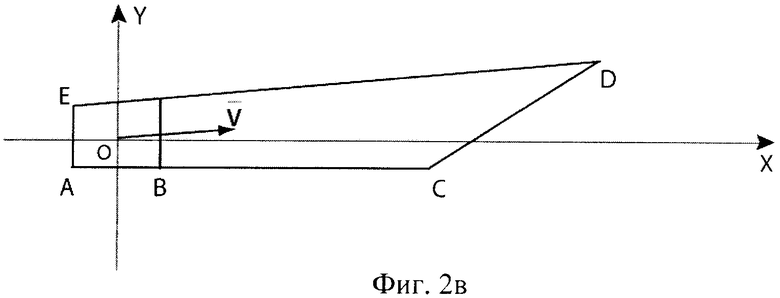
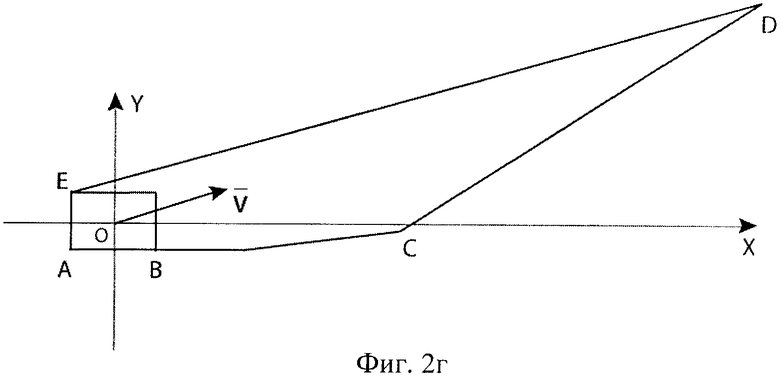
На фиг.2 показаны изменения конфигурации защитных зон при эволюциях вертолета в вертикальной плоскости.
На фиг.2а представлен случай снижения движения с малой путевой скоростью.
На фиг.2б показаны формы ЗС и ЗУ в режиме висения вертолета. В данном случае ЗУ имеет форму цилиндра.
Фиг.2в содержит изображение ЗС и ЗУ в случае набора высоты с малой скоростью Vy=-ΔVу. В этом случае отрезки АВ и ВС горизонтальны, а верхняя граница зон столкновения и управления ED имеет наклон, равный углу набора высоты вертолетом.
На фиг.2г ЛА имеет значительную скорость набора высоты. В этом случае отрезок АВ вычисляют по формулам
 ув=уA,
ув=уA,
а ВС - по формулам

Попадание препятствия в ЗВ требует от пилота повышенной осмотрительности, анализа ситуации и готовности, при необходимости, начать маневр уклонения. Попадание препятствия в ЗУ требует от экипажа немедленного принятия решения о маневре уклонения и непосредственного исполнения команд. Попадание препятствия в ЗС расценивается как тяжелое летное происшествие и не должно быть допущено.
Если в ЗУ одновременно обнаружено два или более препятствий, то среди них определяют экстремальное. Элементу рельефа, а также искусственному препятствию присваивают признак экстремального препятствия тогда, когда для его преодоления требуется увеличение вертикальной скорости, наибольшее по отношению ко всем другим препятствиям, попадающим в ЗУ. Препятствие сохраняет признак экстремального до тех пор, пока оно находится в ЗУ или пока в ней не появиться препятствие, требующее большего увеличения вертикальной скорости. При каждой смене ЭП пересчитывают и запоминают дальность  а именно удаление препятствия от текущего местоположения ЛА, его геометрическую высоту Не, которая хранится в базе данных, и обратное время полета до препятствия
а именно удаление препятствия от текущего местоположения ЛА, его геометрическую высоту Не, которая хранится в базе данных, и обратное время полета до препятствия 
Наиболее эффективным способом преодоления препятствия является маневр в вертикальной плоскости. Параметры уклонения от столкновения в вертикальной плоскости: заданную высоту Hf и вертикальную скорость  рассчитывают по формулам
рассчитывают по формулам
Hf=He+hm

Здесь hm - минимальный запас пролета препятствия по высоте, заданный соответствующими нормативными документами, Н0 - текущая геометрическая высота вертолета.
В процессе выполнения маневра для каждого момента времени вычисляют командные значения высоты полета Нk и вертикальной скорости 

Здесь τе - оставшееся время полета до ЭП, k - коэффициент, который задают исходя из динамических свойств вертолета.
Периодически в процессе выполнения маневра вычисляют прогнозируемую высоту пролета препятствия
Если величина h*<hm, то начинают выполнение маневра горка, то есть маневра, выполняемого для быстрого увеличения высоты полета за счет использования кинетической энергии движения вертолета. Благодаря превращению части накопленной кинетической энергии движения вертолета в потенциальную энергию его положения в пространстве скороподъемность при выполнении горки значительно больше, чем при обычном установившемся наборе высоты. При этом угол наклона траектории превышает угол установившегося набора высоты при неизменной поступательной скорости.
Необходимое уменьшение путевой скорости для выполнения горки вычисляют по формуле
где De - текущая дальность до ЭП.
В противном случае, а именно при невозможности преодоления препятствия путем выполнения горки, вырабатывают команду экстренного торможения и переходят на режим висения.
При наличии достаточного запаса по времени для обхода одиночного препятствия или компактной группы препятствий выбирают маневр в горизонтальной плоскости, для чего рассчитывают заданное изменение путевого угла.
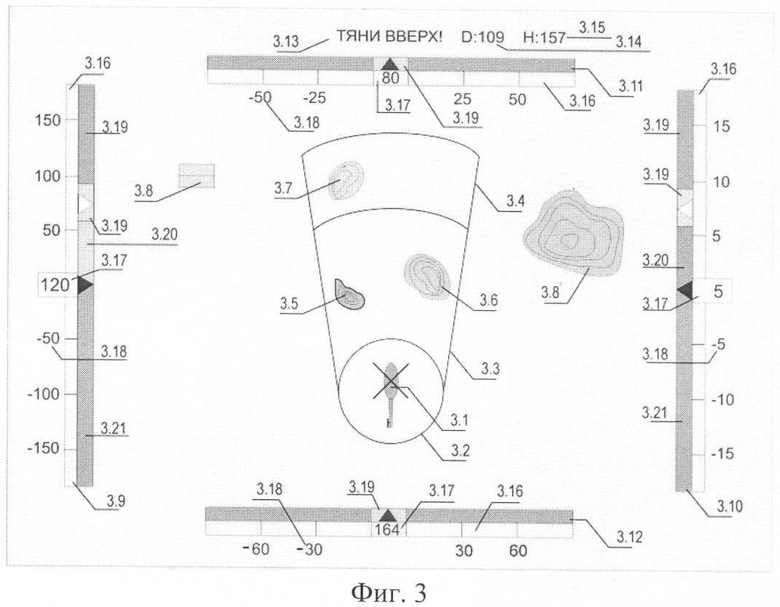
На экран внутрикабинного индикатора, вид которого показан на фиг.3, выводят данные об элементах рельефа и искусственных препятствиях 3.8, высота которых превышает опорную плоскость, параллельную плоскости движения и отстоящую от нее на величину допустимого запаса по высоте hm. На фиг.3 также показаны 3.1 - силуэт вертолета, 3.2 - контур проекции ЗС, 3.3 - контур проекции ЗУ, 3.4 - контур проекции ЗВ, 3.5 - ЭП, выделенное в ЗУ, 3.6 - другие препятствия в ЗУ, 3.7 -препятствия в ЗВ, 3.9 - шкала высоты, 3.10 - шкала вертикальной скорости, 3.11 - шкала путевой скорости, 3.12 - шкала путевого угла, 3.13 - зона сигнализации об обнаружении ЭП в ЗУ, 3.14 - текущая дальность до ЭП в метрах, 3.15 - высота ЭП в метрах. Препятствия, попавшие в ЗУ 3.5 и 3.6, отображают красным цветом, а в ЗВ 3.7 - желтым. Экстремальное препятствие 3.5, выделенное в ЗУ, а также все препятствия, попавшие в ЗС, отображают мигающей подсветкой красного цвета. Ориентация вертолета в пространстве определяется по путевому углу или углу рысканья. Переход с ориентации по путевому углу на ориентацию по углу рысканья осуществляется по признаку перехода через заданную величину путевой скорости (1-2 м/с).
Каждая из шкал высоты 3.9, вертикальной скорости 3.10, путевой скорости 3.11 и путевого угла 3.12 имеет неподвижный оцифрованный индекс 3.17, расположенный посередине, на котором отображено текущее значение высоты в метрах, вертикальной скорости в метрах в секунду, путевой скорости в километрах в час и путевого в градусах соответственно. Деления шкал 3.16 рассчитывают относительно неподвижного индекса текущего значения 3.17. Единицы деления 3.18 пропорциональны текущему значению соответствующей шкалы и имеют относительную размерность. Подвижный символ 3.19 указывает на заданное командное значение при маневре уклонения. Также на шкалах указывают рекомендуемый 3.20 диапазон изменения величины зеленым цветом, разрешенный 3.21 - желтым и запрещенный 3.22 - красным.
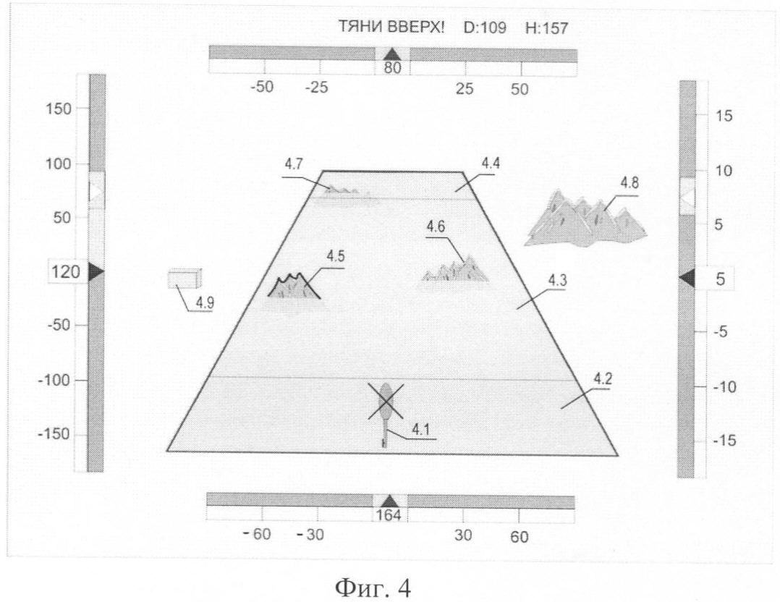
Изображение в плане не дает наглядного представления о высоте препятствий, поэтому при выполнении вертикального маневра, а именно после входа препятствия в ЗУ, на экране формируют трехмерное изображение, вид которого показан на фиг.4.
Для формирования двумерного изображения на экране индикатора вводят систему экранных координат Ovu, начало которой располагают в центре неподвижного символа вертолета, ось Ov расположена по вертикальной оси экрана, а ось Оu - по горизонтальной. Каждая наблюдаемая точка реального трехмерного пространства с координатами (x, у, z) имеет на плоскости экрана свое изображение, а именно точку с координатами (u, v). Указанные экранные координаты вычисляют по формулам
u=mzz,
v=mxx+myy,
причем масштабные коэффициенты mx, mу, mz нелинейно изменяют с изменением удаления х, а именно уменьшают по мере увеличения координаты х.
При построении изображений на экране за зрительную или оптическую ось принимают ось Ох. Указанные выше формулы описывают систему перспектив, а именно проективное преобразование объектов реального трехмерного пространства в плоское изображение на экране дисплея.
На фиг.4 изображены силуэт вертолета 4.1, контуры зон столкновения 4.2, управления 4.3 и внимания 4.4, экранные координаты точек сечения которых, так же как и координаты положения препятствий 4.5-4.9, вычисляют в виде нелинейных функций реальных координат. Из всех препятствий отображают только те, чья высота превышает опорную плоскость, параллельную плоскости движения, опущенную на величину hm. Их высота соответствует превышению над опорной плоскостью, а цвет определяют по типу зоны, в которой они находятся. Выборочный вывод препятствий на экран дисплея позволяет избежать избыточности информации на экране, и, как следствие, помогает пилоту быстрее ориентироваться и адекватно оценивать текущую ситуацию. Искусственные препятствия 4.9 рисуют в виде контуров. В памяти бортового вычислителя хранят некоторое количество шаблонов, применяемых для отображения типовых искусственных препятствий, таких как здания, башни/вышки, ЛЭП, ВПП и др. Если ресурсы памяти и вычислительного блока достаточны, то отдельные объекты отображают в виде фотореалистичных ЗD-моделей, созданных в специализированных программах и хранимых в соответствующей библиотеке объектов.
Заявленный способ предупреждения столкновения вертолета с препятствиями реализуется устройством, структурная схема которого показана на фиг.5. Устройство содержит процессор 5.1, к которому подключены блоки БДР 5.2, БД ИП 5.3, АНБД 5.4 и БД ЛТХ 5.5, блок текущих параметров полета (ТПП) 5.6. Выходы процессора 5.1 подключены к входу генератора электрических сигналов (ГС) 5.7, выходы которого подключены к входам соответствующего индикаторного оборудования (ИО) 5.8 и аудиоустройств 5.9 и 5.10. От спутниковой навигационной системы типа GPS или ГЛОНАСС блок ТПП 5.6 поучает данные о текущих координатах ЛА, а именно о широте и долготе, геометрической высоте полета, вертикальной скорости, путевой скорости и путовом угле. Также данные о текущих параметрах полета вертолета поступают в блок ТПП 5.6 от датчиков воздушной скорости, угловой скорости разворота и датчика угла рысканья. Процессор 5.1 на основании полученных данных рассчитывает параметры защитных зон, далее по вычисленным параметрам и полученным данным о высотах и координатах препятствий выделяет те препятствия, которые попадают в пределы указанных зон. Среди них выделяет ЭП, рассчитывает для него параметры уклонения по высоте, вертикальной скорости или путевой скорости, которые индицируют на соответствующих шкалах на экране индикатора. Также о препятствиях, находящихся в пределах защитных зон, пилот информируется соответствующими текстовыми сообщениями на экране индикатора и дублирующими голосовыми сообщениями, которые подаются на наушники 5.10 или транслируются через кабинный громкоговоритель 5.9.
Предложенный способ решает задачу предупреждения столкновений вертолета с элементами рельефа и искусственными сооружениями. Требуемый результат достигается путем построения защитных зон, размер и конфигурацию которых регулируют в зависимости от изменений вертикальной и путевой скорости вертолета. Также динамические характеристики и особенности винтокрылых машин учитывают при выработке командных сигналов. Предложенные способы формирования изображений на экране внутрикабинного индикатора предоставляют экипажу в полном объеме необходимую и достаточную информацию для предварительной оценки складывающейся ситуации, а также для ее разрешения. Тем самым при использовании заявленного способа предупреждения угрозы столкновения вертолета с наземными препятствиями оказывается возможным реализация заявленного технического результата.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИНДИКАЦИИ УГРОЗ И КОМАНД ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЙ В ВОЗДУШНОМ ПРОСТРАНСТВЕ | 2008 |
|
RU2373116C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ПРЕДУПРЕЖДЕНИЯ УГРОЗЫ СТОЛКНОВЕНИЯ ВОЗДУШНОГО СУДНА С ПРЕПЯТСТВИЯМИ ПОДСТИЛАЮЩЕЙ ПОВЕРХНОСТИ | 2005 |
|
RU2297047C1 |
| СПОСОБ ПРЕДУПРЕЖДЕНИЯ УГРОЗЫ СТОЛКНОВЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА С ПРЕПЯТСТВИЯМИ ПОДСТИЛАЮЩЕЙ ПОВЕРХНОСТИ | 2007 |
|
RU2356099C1 |
| СПОСОБ ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЯ САМОЛЕТОВ И ВЕРТОЛЕТОВ С РЕЛЬЕФОМ МЕСТНОСТИ И УСТРОЙСТВО НА ЕГО ОСНОВЕ | 2008 |
|
RU2376645C1 |
| ИНТЕЛЛЕКТУАЛЬНЫЙ ЧЕЛОВЕКО-МАШИННЫЙ ИНТЕРФЕЙС ЭКИПАЖА ВЕРТОЛЕТА ПО ВЫСОТНО-СКОРОСТНЫМ ПАРАМЕТРАМ И ПАРАМЕТРАМ ВОЗДУШНОЙ СРЕДЫ, ОКРУЖАЮЩЕЙ ВЕРТОЛЕТ | 2019 |
|
RU2729891C1 |
| СИСТЕМА УПРАВЛЕНИЯ В ПРОДОЛЬНОМ КАНАЛЕ ПИЛОТИРУЕМЫХ И БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ В РЕЖИМЕ УВОДА С ОПАСНОЙ ВЫСОТЫ ПРИ РАБОТЕ ПО НАЗЕМНЫМ ОБЪЕКТАМ | 2016 |
|
RU2644048C2 |
| СПОСОБ ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА С ЗЕМЛЕЙ И УСТРОЙСТВО НА ЕГО ОСНОВЕ | 2004 |
|
RU2262746C1 |
| СПОСОБ ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА С РЕЛЬЕФОМ МЕСТНОСТИ И УСТРОЙСТВО НА ЕГО ОСНОВЕ | 2006 |
|
RU2301456C1 |
| СИСТЕМА ВИЗУАЛИЗАЦИИ ПОЛЕТА И КОГНИТИВНЫЙ ПИЛОТАЖНЫЙ ИНДИКАТОР ОДНОВИНТОВОГО ВЕРТОЛЕТА | 2012 |
|
RU2497175C1 |
| СПОСОБ ПРЕДУПРЕЖДЕНИЯ ПОПАДАНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА В ОПАСНУЮ ЗОНУ ВИХРЕВОГО СЛЕДА ГЕНЕРАТОРА ВИХРЕЙ | 2018 |
|
RU2695019C1 |
Изобретение относится к бортовым системам предотвращения столкновения с землей, сигнализирующим пилоту об угрозе такого столкновения. Способ заключается в том, что во время выполнения полета рассчитывают параметры защитных зон. По вычисленным параметрам зон и полученным данным о высотах и координатах препятствий выделяет те препятствия, которые попадают в пределы указанных зон. Среди них выделяют экстремальное препятствие, рассчитывают для него параметры уклонения по высоте, вертикальной скорости или путевой скорости, которые индицируют на соответствующих шкалах на экране дисплея. На экране внутрикабинного дисплея формируют изображение, позволяющее пилоту быстро ориентироваться и адекватно оценивать сложившуюся ситуацию. Достигается эффективность полета с любой земной скоростью на всех режимах полета, включая висение, с учетом динамических характеристик и особенностей винтокрылых машин. 7 з.п. ф-лы, 9 ил.
1. Способ предупреждения угрозы столкновения вертолета с наземными препятствиями, заключающийся в том, что предварительно формируют базу данных рельефа подстилающей поверхности, аэронавигационную базу данных, базу данных летно-технических характеристик вертолета, выделяют в процессе полета наземные препятствия, представляющие угрозу столкновения с ними вертолета, вычисляют с учетом всех выделенных препятствий одну или более траектории полета, исключающие угрозу столкновения вертолета с экстремальным из числа выделенных препятствий, рассчитывают параметры уклонения вертолета от препятствия, генерируют электрические сигналы управления, которые отображают с помощью средств индикации, отличающийся тем, что в процессе полета вычисляют границы последовательно примыкающих к друг другу зоны столкновения, зоны управления и зоны внимания, причем зона столкновения представляет собой область пространства, внутри которой находится вертолет, ограниченная поверхностью второго порядка, размеры которой выбирают в зависимости от этапа и режима полета, и к которой непосредственно примыкает зона управления, ограниченная поверхностями, касательными к зоне столкновения, причем размеры зоны управления вычисляют в зависимости от прогнозируемых параметров движения, а зона внимания по своим размерам превосходит зону управления, из числа наземных препятствий выделяют препятствия, попавшие в зоны, причем траектории полета и параметры уклонения вертолета, исключающие столкновение вертолета с препятствиями, вычисляют с учетом всех препятствий, находящихся в зоне управления, в соответствии с значениями вычисленных параметров уклонения генерируют электрические сигналы управления, которые являются командами по изменению высоты полета, а также путевого угла и путевой скорости, и дополнительно для всех зон генерируют информационные сигналы о находящихся в этих зонах препятствиях, причем эти сигналы отображают на экране внутрикабинного индикатора.
2. Способ по п.1, отличающийся тем, что зона столкновения представляет собой цилиндр, центр которого совпадает с центром масс вертолета, вертикальное сечение зоны управления ограничивают снизу ломаной прямой, состоящей не менее чем из трех сопрягающихся участков, первый начинается в точке касания к зоне столкновения, противоположной направлению движения, располагается под прогнозируемым углом наклона траектории и имеет протяженность, пропорциональную величине прогнозируемой земной скорости, второй участок горизонтальный и состоит из двух частей, причем первая имеет длину равную диаметру зоны столкновения, а вторая пропорциональна величине прогнозируемой путевой скорости, третий участок имеет наклон, соответствующий углу наклона траектории с максимальной установившейся скоростью набора высоты при текущей путевой скорости, причем первый и второй участки меняют местами в зависимости от режима полета, сверху зона управления ограничена отрезком прямой, начинающимся в верхней точке касания к зоне столкновения, противоположной направлению движения, располагается под углом набора высоты в случае, когда вертолет движется вверх, и горизонтально в остальных случаях, горизонтальная проекция зоны управления представляет собой сектор, ось которого совпадает с вектором путевой скорости, протяженность определяется размером вертикального сечения, а угол раствора - угловой скоростью разворота.
3. Способ по п.1, отличающийся тем, что при попадании препятствий в зону управления определяют экстремальное препятствие, вычисляют безопасную высоту пролета экстремального препятствия, задают величину вертикальной скорости в момент прохождения указанного препятствия, для каждого момента времени вычисляют заданные величины вертикальной скорости и высоты, формируют команды управления и индицируют их на экране индикатора.
4. Способ по п.3, отличающийся тем, что при выполнении маневра уклонения периодически вычисляют с учетом эксплуатационных ограничений прогнозируемую высоту пролета препятствия, при недостаточном запасе по высоте вычисляют необходимое уменьшение путевой скорости и траекторию торможения с выполнением горки, а при невозможности преодоления препятствия путем выполнения горки вырабатывают команду экстремального торможения и перехода на режим висения.
5. Способ по п.1, отличающийся тем, что для уклонения от одиночного препятствия или компактной группы препятствий выполняют горизонтальный маневр, причем вычисляют требуемые изменения путевого угла, а также диапазоны недопустимых значений путевого угла.
6. Способ по п.1, отличающийся тем, что на экране внутрикабинного дисплея отображают данные об элементах рельефа, содержащихся в цифровой модели рельефа, данные об искусственных препятствиях, хранящихся в векторном виде в соответствующей базе данных, высота которых превышает опорную плоскость, параллельную плоскости прогноза движения и отстоящую от нее на величину допустимого запаса по высоте, причем элементы рельефа и искусственные препятствия, попавшие в зону управления и в зону внимания, отображают разными цветами, а именно красным и желтым, а экстремальное препятствие, выделенное в зоне управления, а также все препятствия, попавшие в зону столкновения, маркируют мигающей подсветкой, также отображают линии динамически меняющихся границ зон столкновения, управления и внимания, причем изображение на экране дисплея в режиме висения ориентируют по направлению продольной оси вертолета, а в остальных случаях - по направлению вектора путевой скорости.
7. Способ по п.6, отличающийся тем, что на экране внутрикабинного дисплея отображают данные с использованием перспективной системы реального трехмерного пространства, причем экранные координаты точек сечения зон столкновения, управления и внимания, а также положения препятствий вычисляют в виде нелинейных функций реальных координат, элементы рельефа отображают послойно, причем более удаленные препятствия отображают более темным цветом, а искусственные препятствия отображают в контурном виде.
8. Способ по п.1, отличающийся тем, что на экране внутрикабинного дисплея располагают горизонтальные шкалы путевого угла и путевой скорости, вертикальные шкалы высоты и вертикальной скорости, причем на каждой из шкал отображают неподвижные оцифрованные индексы текущих значений путевого угла, путевой скорости, высоты и вертикальной скорости соответственно, а заданные значения указанных параметров изображают в виде подвижных индексов, причем дополнительно отображают разрешенные и запрещенные диапазоны изменения указанных параметров.
| СИСТЕМА ОБХОДА ОТ ПРЕПЯТСТВИЙ ДЛЯ ЛЕТАТЕЛЬНОГО АППАРАТА С НЕСУЩИМ ВИНТОМ | 2004 |
|
RU2312797C2 |
| СПОСОБ ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА С ЗЕМЛЕЙ И УСТРОЙСТВО НА ЕГО ОСНОВЕ | 2004 |
|
RU2262746C1 |
| Приспособление для изменения длины струны арфы | 1944 |
|
SU67309A1 |
| СИСТЕМА ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА С ЗЕМЛЕЙ | 2005 |
|
RU2271039C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ПРЕДУПРЕЖДЕНИЯ УГРОЗЫ СТОЛКНОВЕНИЯ ВОЗДУШНОГО СУДНА С ПРЕПЯТСТВИЯМИ ПОДСТИЛАЮЩЕЙ ПОВЕРХНОСТИ | 2005 |
|
RU2297047C1 |
| Питатель для диэлектрических материалов | 1978 |
|
SU732676A1 |

