Изобретение относится к области безопасности полетов и, в частности, к способам раннего предупреждения летного экипажа об опасной близости земли и может использоваться на всех типах летательных аппаратов (ЛА) для повышения безопасности полетов.
Известен способ предупреждения столкновения ЛА с землей, состоящий в том, что определяют местоположение ЛА с помощью навигационной системы, производят вычисление параметров текущего динамического состояния ЛА, производят оценку его координат, вычисляют прогнозируемую траекторию, сопоставляют прогнозируемую траекторию с рельефом местности и предупреждают об опасности путем сигнализации и видеоотображения опасного рельефа [1-3].
Устройства, реализующие данный способ, содержат навигационную систему (бортовые измерители), определитель координат ЛА, генератор траектории, определитель (вычислитель) опорной траектории, базу данных рельефа, компаратор, причем выход навигационной системы соединен с входом определителя координат ЛА и с входом определителя опорной траектории, выходы которых соответственно подключены к первому и второму входу генератора траектории, выход которого подключен к первому входу компаратора, второй вход которого соединен с выходом навигационной системы, третий вход компаратора соединен с выходом базы данных рельефа местности, а выход компаратора является выходом устройства.
Известен способ предупреждения столкновения ЛА с землей [4], состоящий в том, что определяют местоположение ЛА с помощью навигационной системы, производят вычисление параметров текущего динамического состояния ЛА, производят оценку его координат, вычисляют прогнозируемую траекторию, формируют профильную проекцию рельефа, сопоставляют профильную проекцию с прогнозируемой траекторией и предупреждают об опасности путем сигнализации и видеоотображения опасного рельефа.
Упомянутые аналоги изобретения имеют недостаточную надежность предсказания возможности столкновения, что связано с информационной недостаточностью сведений о взаимном расположении ЛА и опасного рельефа (например, из-за отсутствия фронтальной проекции рельефа).
Прототипом заявляемого изобретения является способ предупреждения столкновения ЛА с землей и устройство на его основе, заявленные в [5].
Способ-прототип состоит в том, что определяют местоположение ЛА с помощью навигационной системы, производят вычисление параметров текущего динамического состояния ЛА, производят оценку его координат, вычисляют прогнозируемую траекторию, формируют фронтальную и плановую проекции рельефа, сопоставляют прогнозируемую траекторию с рельефом и предупреждают об опасности путем сигнализации и видеоотображения опасного рельефа.
Способ-прототип [5], по сравнению с упомянутыми способами [1-4], обладает большей надежностью в связи с использованием большего времени прогноза для определения опасной ситуации и более подробного представления рельефа в бортовой базе данных.
Однако данный способ-прототип также обладает недостатками, связанными с отсутствием профильной проекции рельефа, что не позволяет обеспечить необходимой информационной надежности предупреждения столкновения.
Таким же недостатком обладает и устройство-прототип, выполненное по упомянутому выше способу-прототипу и описанному в [5].
Устройство-прототип [5] содержит навигационную систему, обнаружитель препятствий, устройство сигнализации, видеогенератор и дисплей на его выходе, при этом обнаружитель препятствий включает вычислитель параметров текущего динамического состояния, определитель координат, вычислитель прогнозируемой траектории и компаратор, выход навигационной системы подключен к входам вычислителя параметров текущего динамического состояния и определителя координат, выходы которых соответственно подключены к первому и второму входам вычислителя прогнозируемой траектории, третий вход которого соединен с базой аэронавигационной информации, первый, второй и третий входы компаратора соединены соответственно с блоком управления, базой данных рельефа и выходом вычислителя прогнозируемой траектории, первый, второй и третий выходы компаратора соответственно соединены с входом устройства сигнализации, первым входом формирователя плановой проекции рельефа, входящего в состав видеогенератора, и базой аэронавигационной информации, второй и третий входы формирователя плановой проекции рельефа соответственно соединены с базой аэронавигационной информации и выходом определителя координат, при этом второй выход компаратора соединен с первыми входами формирователя фронтальной проекции рельефа и формирователя отображения в режиме 3D (отображения в аксонометрии), вторые входы которых соединены с выходом определителя координат, при этом третий вход формирователя отображения в режиме 3D соединен с базой данных для отображения в режиме 3D, а выходы упомянутых формирователей плановой проекции рельефа, фронтальной проекции рельефа и формирователя отображения в режиме 3D соединены с входом дисплея.
Задачей заявляемого изобретения является повышение надежности предсказания возможности столкновения ЛА с землей и предотвращения опасного сближения с рельефом благодаря повышению объема информации о взаимном расположении ЛА и опасного рельефа и повышению эргономичности ее представления экипажу.
Данная задача решается следующим образом.
Предложенный способ предупреждения столкновения ЛА с землей состоит в том, что определяют местоположение ЛА с помощью навигационной системы, производят вычисление параметров текущего динамического состояния ЛА, производят оценку его координат, вычисляют прогнозируемую траекторию, определяют опасный рельеф и предупреждают об опасности путем сигнализации и видеоотображения опасного рельефа, при этом после вычисления прогнозируемой траектории формируют для ЛА защитное пространство и сопоставляют его с рельефом, причем синтезируют профильную и фронтальную проекции рельефа путем выбора максимальных высот рельефа в пределах информационного сканирования элементов рельефа в продольном и поперечном направлениях по отношению к направлению полета ЛА, адаптируют защитное пространство к текущему динамическому состоянию ЛА, определяют плановую, профильную и фронтальную проекции защитного пространства, совмещают упомянутые проекции защитного пространства с одноименными проекциями рельефа, формируют видеоотображение совмещенных плановых, профильных и фронтальных проекций рельефа и защитного пространства и предупреждают пилота о возможной опасности путем видеоотображения контакта профильной проекции защитного пространства с профильной проекцией рельефа и выделения на видеоотображении упомянутых совмещенных проекций элементов опасного рельефа внутри защитного пространства.
Предлагается вариант способа, состоящий в том, что по плановой и синтезированным профильной и фронтальной проекциям рельефа производят оценку расстояния между одноименными проекциями защитного пространства и опасным рельефом и принимают по совмещенной профильной проекции решение о необходимости корректировки траекторного угла, а по совмещенной фронтальной и совмещенной плановой проекциям принимают решение о необходимости и направлении бокового маневра.
Предлагается вариант способа, в котором при видеоотображении рельефа производят окрашивание рельефа с учетом вертикальной скорости полета ЛА.
Предлагается вариант способа, состоящий в том, что область информационного сканирования для формирования профильной проекции определяют в виде части плановой проекции рельефа, ограниченной контуром защитного пространства с примыкающей к нему прямоугольной зоной с поперечным размером, равным размеру передней границы защитного пространства, и продольным размером, равным расстоянию от упомянутой передней границы до границы плановой проекции рельефа, а для формирования фронтальной проекции определяют область информационного сканирования с границей в виде двух дуг окружностей с расположением центров окружностей на линии нижней границы плановой проекции рельефа, причем дуги окружностей замыкаются прямоугольным участком так, что боковые границы плановой проекции защитного пространства являются касательными к упомянутым дугам окружностей, радиусы которых равны отношению квадрата путевой скорости к произведению тангенса угла крена на ускорение свободного падения, при этом поперечный размер упомянутого прямоугольного участка равен поперечному размеру плановой проекции рельефа, а его продольные размеры определяются разностью между расстоянием до неопасного рельефа и радиусом соответствующей дуги.
Предлагается вариант способа, состоящий в том, что защитное пространство ограничивают защитной поверхностью, обращенной к рельефу, совмещенной в исходной точке с ЛА и расширяющейся в направлении полета, причем защитную поверхность формируют шестью последовательными гранями, так что первые пять граней составляют часть защитной поверхности, предупреждающую об опасности снижения ЛА до минимально допустимой высоты полета и расположенную ниже прогнозируемой траектории ЛА, а шестая грань составляет часть защитной поверхности, предупреждающую о рельефе с опасным превышением в направлении полета и расположенную вертикально вверх, причем первая грань вертикальна и по ширине соответствует ошибке определения координат ЛА, а по высоте определяется минимально допустимой высотой полета; длину второй и третьей граней определяют минимальным временем маневра ЛА при обходе препятствия; наклон второй грани относительно горизонта производится под углом, тангенс которого определяется отношением вертикальной и путевой скоростей, третья грань горизонтальна и по длине определяется условием допустимой вероятности ложных срабатываний, четвертая грань простирается вертикально вверх до линии, смещенной вниз на величину, большую минимально допустимой высоты, относительно прогнозируемой траектории ухода от опасного рельефа, пятая грань возвышается относительно горизонта с допустимым траекторным углом до достижения заданного расстояния от ЛА, ограничиваемого вертикальной шестой гранью.
Предлагается также внутри защитного пространства формировать аварийную сигнальную область, подобную по геометрии защитному пространству и ограничиваемую минимально допустимыми временами полета до опасного рельефа.
Предлагается устройство на основе заявляемого способа и его вариантов.
Заявляемое устройство предупреждения столкновения ЛА с землей содержит навигационную систему, обнаружитель препятствий, устройство сигнализации, видеогенератор и дисплей на его выходе, при этом обнаружитель препятствий включает вычислитель параметров текущего динамического состояния, определитель координат, вычислитель прогнозируемой траектории и компаратор, выход навигационной системы подключен к входам вычислителя параметров текущего динамического состояния и определителя координат, выходы которых соответственно подключены к первому и второму входам вычислителя прогнозируемой траектории, третий вход которого соединен с базой аэронавигационной информации, первый и второй входы компаратора соединены соответственно с блоком управления и базой данных рельефа, первый и второй выходы компаратора соответственно соединены с входом устройства сигнализации и первым входом формирователя плановой проекции рельефа, входящего в состав видеогенератора, второй и третий входы формирователя плановой проекции рельефа соответственно соединены с базой аэронавигационной информации и выходом определителя координат, при этом введены формирователь защитного пространства, блок экстраполяции видеоотображения, вычислитель параметров синтезируемых проекций рельефа, формирователи синтезируемой фронтальной и синтезируемой профильной проекций рельефа, формирователи плановой, фронтальной и профильной проекций защитного пространства, а в видеогенератор дополнительно введены формирователи совмещенной плановой, совмещенной фронтальной и совмещенной профильной проекций рельефа и защитного пространства, причем первый вход формирователя защитного пространства соединен с выходом навигационной системы, второй, третий и четвертый входы соединены соответственно с выходами вычислителя параметров текущего динамического состояния, базы аэронавигационной информации и вычислителя прогнозируемой траектории, выход формирователя защитного пространства соединен с третьим входом компаратора, первым входом вычислителя параметров синтезируемых проекций и входами формирователей плановой, фронтальной и профильной проекций защитного пространства, первый и второй входы блока экстраполяции видеоотображения соединены соответственно с выходами вычислителя параметров текущего динамического состояния и вычислителя прогнозируемой траектории, вычислитель параметров синтезируемых проекций соединен вторым входом с выходом вычислителя параметров текущего динамического состояния, первые входы формирователей синтезируемой фронтальной и синтезируемой профильной проекций рельефа соединены со вторым выходом компаратора, а второй, третий и четвертый входы формирователей синтезируемых фронтальной и профильной проекций рельефа соединены соответственно с выходами вычислителя параметров синтезируемых проекций, определителя координат и блока экстраполяции видеоотображения, соединенного выходом также с четвертым входом формирователя плановой проекции рельефа, выход которого соединен с первым входом формирователя совмещенной плановой проекции рельефа и защитного пространства, первые входы упомянутых формирователей совмещенной фронтальной и совмещенной профильной проекций соединены соответственно с выходами формирователей синтезируемой фронтальной и синтезируемой профильной проекций рельефа, вторые входы упомянутых формирователей совмещенной плановой, совмещенной фронтальной и совмещенной профильной проекций соединены соответственно с выходами формирователей плановой, фронтальной и профильной проекций защитного пространства, а выходы формирователей упомянутых совмещенных проекций образуют выход видеогенератора.
Предлагается вариант заявляемого устройства, в котором формирователь плановой проекции рельефа, вычислитель параметров синтезируемых проекций рельефа, формирователи плановой, фронтальной и профильной проекций защитного пространства выполнены с масштабирующими входами, соединенными с выходом блока управления, а выход видеогенератора соединен с входом дисплея через блок вывода видеоотображения, управляющий вход которого подключен к выходу блока управления.
Суть заявляемого изобретения поясняется с помощью фиг.1-10.
На фиг.1 приведены плановая, профильная и фронтальная проекции защитного пространства (ЗП).
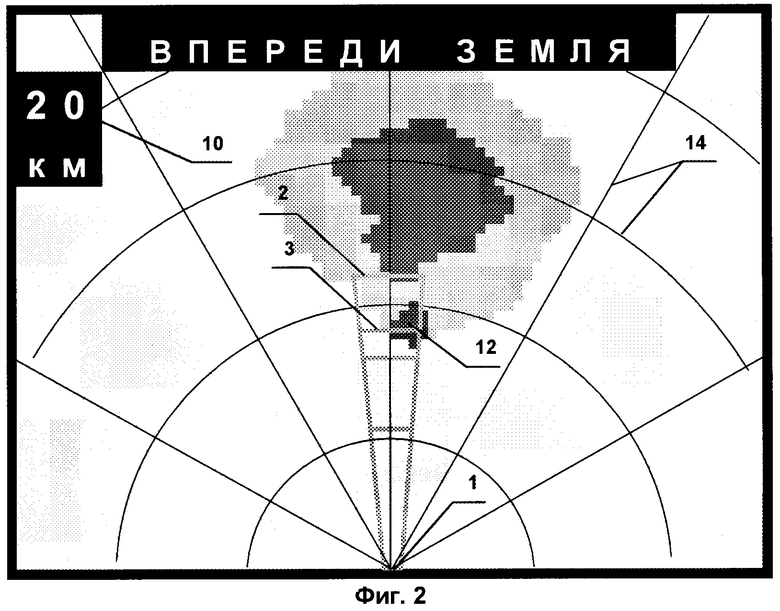
На фиг.2 приведена совмещенная плановая проекция рельефа и ЗП.
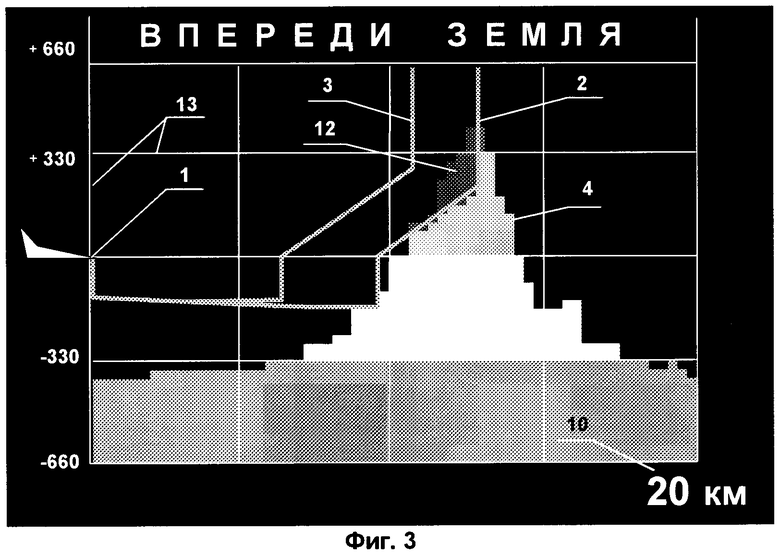
На фиг.3 приведена совмещенная профильная проекция рельефа и ЗП.
На фиг.4 приведена совмещенная фронтальная проекция рельефа и ЗП.
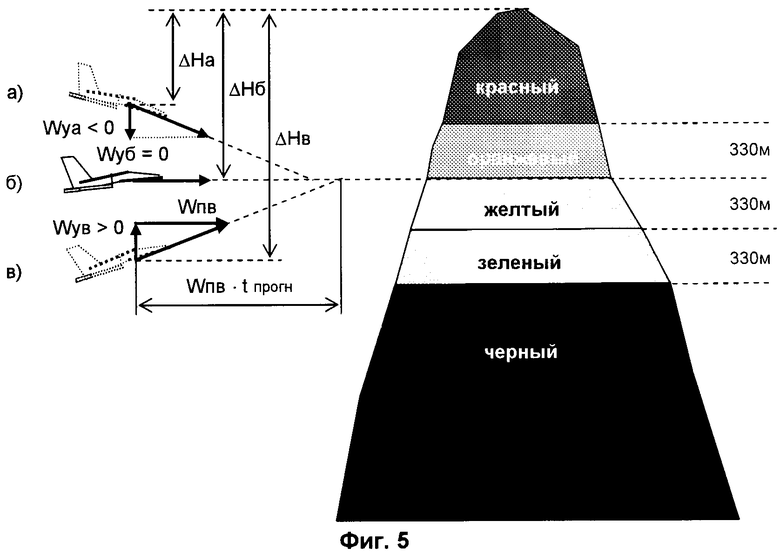
На фиг.5 приведена схема соответствия цветов окрашивания рельефа высотам превышения рельефа, используемая при отображении всех его проекций на экране дисплея.
На фиг.6 приведена совмещенная плановая проекция рельефа и ЗП, а также область информационного сканирования плановой проекции рельефа, используемая для синтезирования профильной проекции рельефа.
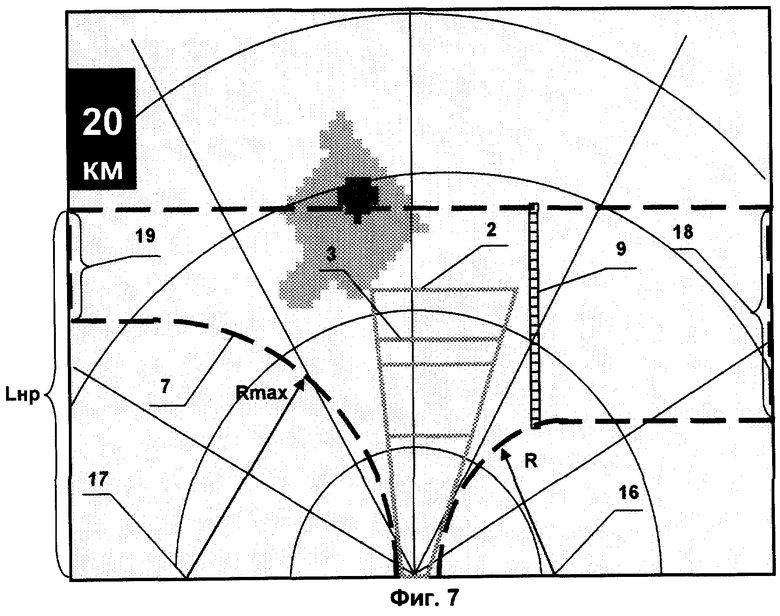
На фиг.7 приведена совмещенная плановая проекция рельефа и ЗП, а также область информационного сканирования плановой проекции рельефа, используемая для синтезирования фронтальной проекции рельефа.
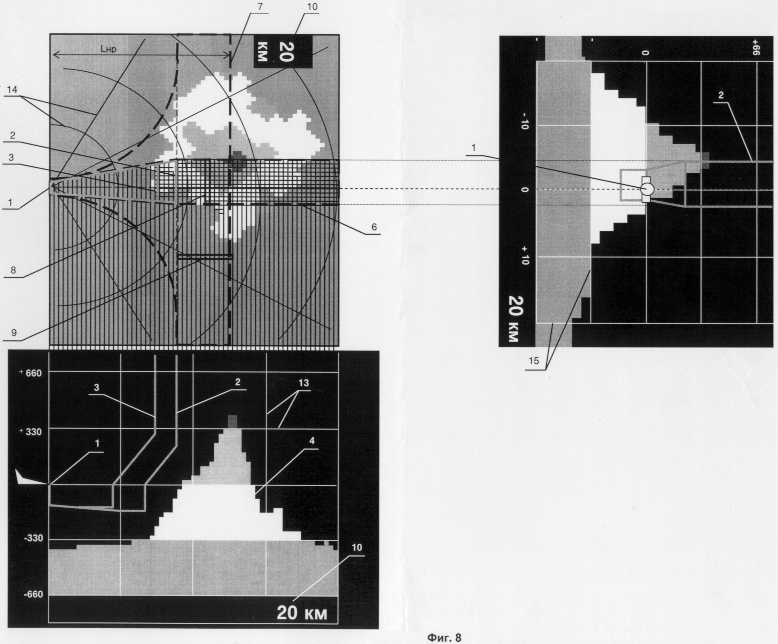
На фиг.8 приведена схема геометрического соответствия друг другу трех совмещенных проекций рельефа и ЗП, а также двух областей информационного сканирования, используемых для синтезирования профильной и фронтальной проекций рельефа.
На фиг.9 приведена схема устройства, функционирующего на основе заявляемого способа.
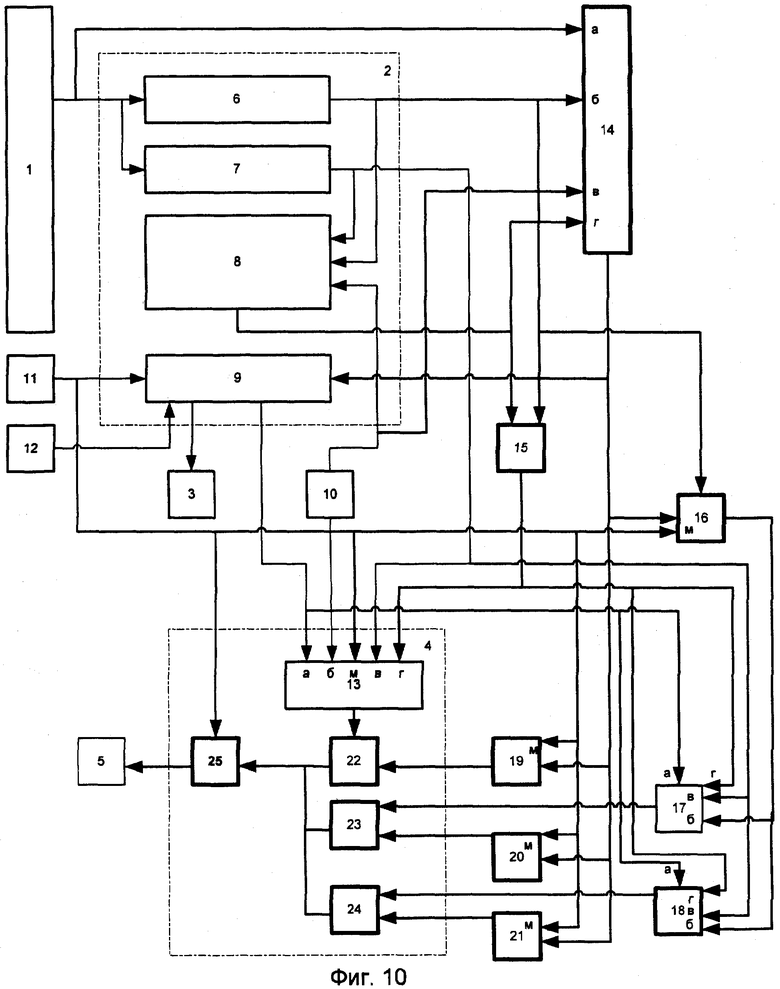
На фиг.10 приведен вариант схемы устройства, функционирующего на основе заявляемого способа.
Заявляемый способ реализуется следующим образом.
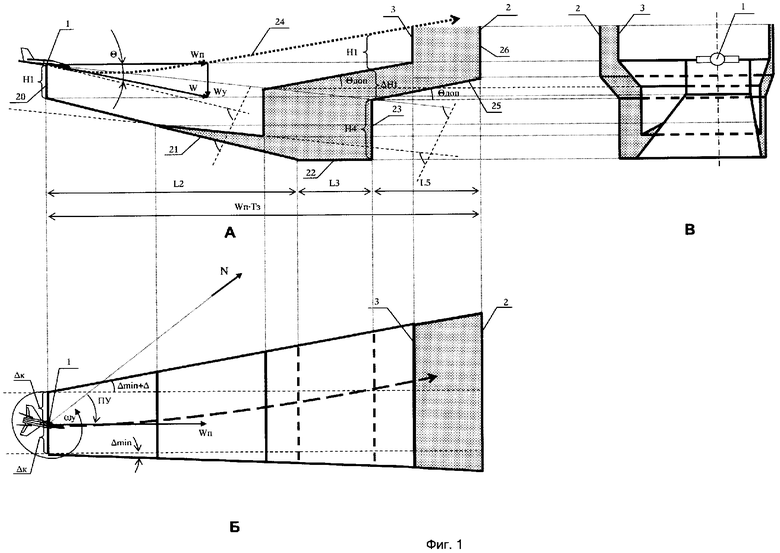
С помощью навигационной системы определяют местоположение ЛА 1, вычисляют параметры текущего динамического состояния ЛА (путевую скорость Wп, вертикальную скорость Wу, путевой угол ПУ, скорость разворота ωу и др.), по которым производят экстраполяцию местоположения ЛА на заданный временной интервал tпрогн. Далее, по текущему путевому углу ПУ вычисляют прогнозируемую траекторию, рассчитывают связанное с прогнозируемой траекторией защитное пространство (ЗП) ЛА, изображенное на фиг.1 в трех проекциях А, Б, В.
ЗП на фиг.1 представляет собой пространственную область, связанную непосредственно с текущим местоположением ЛА и определяемую по форме и ориентации в пространстве точностью определения координат Δк, параметрами движения (Wп, Wу, ПУ, ωу), минимально допустимой высотой Нмд, зависящей от этапа выполняемого полета (крейсерский полет, полет в зоне аэродрома, заход на посадку) и режимом полета (горизонтальный полет, снижение, набор высоты). ЗП строится от ЛА в направлении полета и предназначено для оценки возможности столкновения и формирования сигнализации, предупреждающей экипаж об опасном сближении с рельефом, находящимся в области предполагаемого местоположения ЛА в ближайший заданный временной отрезок полета Тз. По результатам сопоставления границы ЗП (см. 2 на фиг.1) с базой данных рельефа (БДР) формируют предупреждающую сигнализацию об опасности, которую представляет для ЛА впереди расположенный рельеф. Внутри описанного выше ЗП, на основе расчетных данных, строят еще одно подобное по форме пространство - аварийную сигнальную область, при пересечении граничной поверхности которой (см. 3 на фиг.1) формируют аварийную сигнализацию. Поверхность 3 строят из расчета формирования аварийной сигнализации в ситуациях, когда рельеф находится на минимально-допустимом удалении от движущегося в его сторону ЛА. Расчет конфигурации защитных поверхностей 2 и 3 возобновляется с требуемым темпом и, таким образом, ЗП формируется адаптированным к текущему динамическому состоянию ЛА, к этапу и режиму выполняемого полета.
Одновременно формируют видеоотображение рельефа. Формирование видеоотображения рельефа производят, в отличие от прототипа, в трех (у прототипа - в двух) согласованных по масштабам проекциях.
Кроме того, в отличие от прототипа, все проекции рельефа отображают на экране в едином масштабе совместно с соответствующими проекциями защитного пространства, формируя совмещенные проекции. Такой прием существенно облегчает экипажу задачу принятия решения, так как позволяет оценить степень опасности сближения с рельефом не только после формирования сигнализации, но и до ее формирования, в процессе профилактического просмотра отображения рельефа. Таким образом, оказывается возможным вообще избежать создания опасной ситуации на борту и формирования сигнализации путем своевременного маневрирования. Сопоставляя ЗП с рельефом в плановой (см. фиг.2), профильной (см. фиг.3) и фронтальной (см. фиг.4) проекциях, экипаж оценивает степень опасности рельефа и, при необходимости, планирует действия по уходу от опасного рельефа.
Формирование плановой проекции рельефа осуществляется, как и в прототипе, с использованием бортовых данных о рельефе, местоположении, скорости движения и путевом угле ЛА. При этом под местоположением понимается получаемая от навигационной системы информация о координатах и высоте ЛА относительно стандартизированной модели Земли (WGS-84). Рельеф окрашивается в черный, зеленый, желтый, оранжевый и красный цвета, в зависимости от его превышения над ЛА (см. фиг.5). Такое разноцветное окрашивание служит средством отображения рельефа на плановой проекции, а также (благодаря закреплению определенных цветов за определенными диапазонами превышения) - средством передачи степени опасности рельефа для ЛА при формировании любой из трех его проекций.
В отличие от прототипа, при окрашивании рельефа на всех проекциях учитывается не только его превышение, но и вертикальная скорость ЛА: в случае одинакового превышения окрашивание рельефа при снижении производится в более тревожные цвета, а при наборе высоты - в менее тревожные цвета, чем при горизонтальном полете. Такое смещение окраски диапазонов превышений рельефа в зависимости от вертикальной скорости ЛА (экстраполяция видеоотображения) обеспечивается приведением цветов в соответствие не с относительным превышением текущей высоты ЛА над рельефом, а с превышением прогнозируемой высоты, на которой ЛА окажется через время полета, равное времени tпрогн. Так на фиг.5 одинаковая окраска рельефа соответствует трем различным превышениям (ΔНа, ΔНб и ΔНв) и вертикальным скоростям полета (Wуа<0, Wуб=0 и Wув>0) ЛА. Несмотря на различные условия движения ЛА относительно рельефа, его окрашивание во всех трех ситуациях (а, б, в) производят одинаково, так как для всех трех ситуаций прогнозируемое превышение ЛА (превышение через время полета, равное tпрогн) для примера, приведенного на фиг.5, оказывается одинаковым. В примере на фиг.5 цвета распределяют в зависимости от превышений элементов рельефа следующим образом: элементы рельефа в диапазоне превышений от прогнозируемой высоты ЛА и ниже на 330 м окрашиваются в желтый цвет, элементы рельефа, расположенные ниже прогнозируемой высоты ЛА в диапазоне от 330 м до 660 м, окрашиваются в зеленый цвет, элементы рельефа, расположенные относительно прогнозируемой высоты ЛА ниже, чем на 660 м, окрашиваются в черный цвет, элементы рельефа в диапазоне превышений от прогнозируемой высоты и выше на 330 м окрашиваются в оранжевый цвет, а расположенные выше прогнозируемой высоты ЛА в диапазоне превышений от 330 м и более - в красный.
Синтезирование профильной (см. 4 на фиг.3) и фронтальной (см. 5 на фиг.4) проекций рельефа осуществляется путем выбора максимальных высот элементов рельефа, представленных на плановой проекции, в пределах соответствующих областей информационного сканирования элементов рельефа (см. 6 на фиг.6 и 7 на фиг.7). Для профильной проекции сканирование производят в пределах строк (см. 8 на фиг.6), а для фронтальной проекции - в пределах столбцов (см. 9 на фиг.7) соответствующих областей информационного сканирования.
Конфигурация областей информационного сканирования для формирования профильной 6 и фронтальной 7 проекций рельефа, приведенных соответственно на Фиг.6 и 7, выбирается из расчета обеспечения отображения на профильной и фронтальной проекциях контуров рельефа, расположенного в пределах пространства возможного нахождения ЛА, с учетом параметров его движения, и масштаба отображения рельефа (см. 10 на фиг.3). Кроме того, конфигурация области информационного сканирования для формирования профильной проекции рельефа 6 выбирается из условия совпадения по времени момента формирования предупреждающей или аварийной сигнализации с моментом касания контура синтезируемой профильной проекции рельефа соответственно контуром профильной проекции ЗП 2 или контуром профильной проекции аварийной сигнальной области 3 (см. фиг.3). Такое совпадение по времени обеспечивается совпадением конфигураций плановой проекции ЗП 2 и ближней к ЛА частью области сканирования 11 (см. фиг.6), используемой для синтезирования профильной проекции рельефа. Совпадение по времени момента формирования соответствующей сигнализации с моментом касания контура профильной проекции рельефа контуром профильной проекции ЗП или контуром профильной проекции аварийной сигнальной области позволяет экипажу не только адекватно реагировать на сформированную в момент касания сигнализацию, но и использовать совмещенную профильную проекцию (см. Фиг.3) для прогноза возможности возникновения опасной ситуации и принятия решения об упреждающем маневрировании.
Формирование согласованных по масштабу видеоотображений совмещенных профильной, фронтальной и плановой проекций рельефа и ЗП (см. Фиг.8) позволяет организовать наглядное предупреждение экипажа об опасности и помогает экипажу точнее оценить конфигурацию рельефа, представляющего опасность для ЛА, путем отображения контакта профильной проекции ЗП с профильной проекцией рельефа (см. Фиг.3) и выделения элементов рельефа (см. 12 на фиг.3), оказавшихся внутри ЗП, на всех формируемых видеоотображениях совмещенных проекций рельефа (плановой, профильной и фронтальной).
По совмещенным плановой, профильной и фронтальной проекциям рельефа с помощью отображаемых на экране соответствующих масштабных сеток (см. 13 на фиг.3, 14 на фиг.6 и 15 на фиг.4) экипаж производит оценку расстояния между одноименными проекциями ЗП и опасной зоны рельефа, по совмещенной профильной проекции - принимает решение о необходимости корректировки траекторного угла Θ (см. фиг.1), а по совмещенным фронтальной и плановой проекциям - о необходимости и направлении бокового маневра для ухода от опасного рельефа. Такую оценку экипаж производит в обязательном порядке при выработке системой предупреждающей (или аварийной) сигнализации, но может (если позволяет рабочая загрузка) производить в профилактических целях, чтобы своевременно принять упреждающие меры и избежать формирования сигнализации.
Область информационного сканирования 6 для формирования профильной проекции определяют в виде части плановой проекции рельефа, ограниченной контуром ЗП 11 с примыкающей к нему прямоугольной зоной с поперечным размером, равным размеру передней границы ЗП, и с продольным размером, равным расстоянию от упомянутой передней границы до границы плановой проекции рельефа (см. Фиг.6).
Для формирования фронтальной проекции 5 определяют область информационного сканирования с границей 7 в виде двух дуг окружностей правого и левого разворота с радиусами R и Rmax (см. фиг.7) с расположением центра 16 (для дуги с радиусом R) и центра 17 (для дуги с радиусом Rmax) на линии нижней границы плановой проекции рельефа, причем упомянутые дуги окружностей замыкаются прямоугольным участком границы с поперечным размером, равным поперечному размеру плановой проекции рельефа, с продольным размером 18, равным разности между расстоянием до неопасного рельефа Lнр и радиусом дуги R выполняемого разворота, и минимальным продольным размером 19, равным разности между расстоянием до неопасного рельефа Lнр и радиусом Rmax, соответствующим углу крена γ, абсолютная величина которого не превышает 10°, при этом центры 16 и 17 расположены на линии нижней границы плановой проекции рельефа так, что боковые границы плановой проекции ЗП являются касательными к упомянутым дугам окружностей, радиусы которых определяются выражением:

где Wп - путевая скорость (горизонтальная проекция общего вектора скорости W), g - ускорение свободного падения, γрасч - расчетный угол крена, определяемый как
При этом под неопасным рельефом понимается рельеф, удаленный от ЛА на безопасное расстояние Lнр, не меньшее Rmax и произведения Wп·Тз и не большее 2Rmax и вертикального размера плановой проекции рельефа.
Как показано на фиг.1, поверхность, ограничивающая формируемое ЗП, обращена к рельефу, совмещена в исходной точке с ЛА, расширяется в направлении полета и имеет удаление переднего фронта от ЛА, соответствующее заданному времени полета Тз с текущей путевой скоростью Wп. Расширение ЗП в направлении полета при отсутствии маневрирования ЛА по курсу производится симметрично: и влево, и вправо на угол Δmin. При наличии ненулевой скорости разворота ωy расширение ЗП в направлении полета производится несимметрично: в сторону выполняемого разворота - на угол Δmin+Δ, а в противоположную сторону - на угол Δmin. При этом дополнительный угол расширения зоны защитного пространства Δ определяется в зависимости от угловой скорости выполняемого в сторону расширения разворота: Δ=f1 (ωу) и ограничен по величине: Δmin+Δ<Δmax.
Граничную поверхность ЗП 2 (см. фиг.1) формируют шестью последовательными гранями (см. 20...23, 25 и 26 на фиг 1). Первые пять последовательных граней составляют часть граничной поверхности, предупреждающую об опасности снижения ЛА до минимально допустимой высоты полета (Нмд). Эта часть граничной поверхности расположена ниже прогнозируемой траектории ухода ЛА от опасного рельефа набором высоты 24 на величину Н1+ΔН1, не меньшую Нмд+ΔН1, где величина дополнительного смещения ΔН1>0 и определяется глубиной расположения аварийной сигнальной области 3 внутри ЗП. Шестая последовательная грань 26 граничной поверхности 2 расположена вертикально вверх и составляет часть граничной поверхности, предупреждающую о рельефе с опасным превышением в направлении полета. При этом под рельефом с опасным превышением понимается рельеф, от которого невозможно уйти, выполняя только набор высоты с соблюдением требований по допустимой вертикальной перегрузке. Первая грань 20 вертикальна, ее ширина равна ошибке определения координат ЛА Δк, а высота H1 является функцией Нмд, соответствующей тому этапу и режиму полета, к которым адаптируется ЗП: H1=f2(Нмд). Длины горизонтальных проекций второй 21 и третьей 22 граней (L2 и L3 соответственно) определяются необходимым временем выполнения вертикального маневра ЛА при обходе препятствия (с учетом допустимой вертикальной перегрузки). Наклон второй грани 21 относительно горизонта производится под углом, тангенс которого определяется отношением вертикальной Wу и путевой Wп скоростей. Третья грань 22 горизонтальна и ее длина (L3) определяется условием допустимой вероятности формирования ложной сигнализации. Четвертая грань 23, имеющая вертикальный размер Н4, простирается вертикально вверх до линии, смещенной на H1+ΔН1 вниз относительно прогнозируемой траектории ухода от опасного рельефа набором высоты 24. Пятая грань 25 (с длиной горизонтальной проекции L5) возвышается под допустимым траекторным углом набора высоты θдоп до достижения заданного расстояния от ЛА, определяемого заданным временем полета Тз со скоростью Wп и ограничиваемого вертикальной шестой гранью 26. Если при выполнении полета элементы рельефа, определяемые бортовой базой данных, по результатам выполняемых расчетов оказываются расположенными внутри ограниченного поверхностью 2 ЗП (см. фиг.1), формируется предупреждающая сигнализация о близком расположении рельефа в направлении полета, которая, как показано выше, сопровождается цветовым, штриховым или любым другим выделением вызвавших ее элементов рельефа на всех отображаемых его проекциях (см. 12 на фиг.2...4).
Внутри ЗП рассчитывают аварийную сигнальную область, подобную по геометрии ЗП и ограничиваемую поверхностью 3, геометрически определяемой минимально допустимыми временами полета до опасного рельефа (см. фиг.1). Если элементы рельефа, определяемые бортовой базой данных, при выполнении полета оказываются, по расчетным данным, расположенными внутри аварийной сигнальной области, ограничиваемой поверхностью 3, формируют аварийную сигнализацию об опасном расположении рельефа в направлении полета.
Т.о. рассмотренный выше способ и его варианты позволяют экипажу адекватно оценить степень опасности рельефа и принять правильное решение о необходимости и характере маневрирования.
Ниже описано устройство, реализующее заявляемый способ.
Устройство на фиг.9, функционирующее на основе описанного выше способа, содержит навигационную систему 1, обнаружитель препятствий 2, устройство сигнализации 3, видеогенератор 4 и дисплей 5 на его выходе, при этом обнаружитель препятствий 2 включает вычислитель параметров текущего динамического состояния 6, определитель координат 7, вычислитель прогнозируемой траектории 8 и компаратор 9, выход навигационной системы 1 подключен к входам вычислителя параметров текущего динамического состояния 6, и определителя координат 7, выходы которых соответственно подключены к первому и второму входам вычислителя прогнозируемой траектории 8, третий вход которого соединен с базой аэронавигационной информации 10, первый и второй входы компаратора 9 соединены соответственно с блоком управления 11 и базой данных рельефа 12, первый и второй выходы компаратора 9 соответственно соединены с входом устройства сигнализации 3 и первым (а) входом формирователя плановой проекции рельефа 13, входящего в состав видеогенератора 4, второй (б) и третий (в) входы формирователя плановой проекции рельефа 13 соответственно соединены с базой аэронавигационной информации 10 и выходом определителя координат 7.
В устройство введены формирователь ЗП 14, блок экстраполяции видеоотображения 15, вычислитель параметров синтезируемых проекций рельефа 16, формирователи синтезируемой фронтальной 17 и синтезируемой профильной 18 проекций рельефа, формирователи плановой 19, фронтальной 20 и профильной 21 проекций ЗП, а в видеогенератор 4 дополнительно введены формирователи совмещенной плановой 22, совмещенной фронтальной 23 и совмещенной профильной 24 проекций рельефа и ЗП, причем первый (а) вход формирователя ЗП 14 соединен с выходом навигационной системы 1, второй (б), третий (в) и четвертый (г) входы соединены соответственно с выходами вычислителя параметров текущего динамического состояния 6, базы аэронавигационной информации 10 и вычислителя прогнозируемой траектории 8, выход формирователя ЗП 14 соединен с третьим входом компаратора 9, первым входом вычислителя параметров синтезируемых проекций 16 и входами формирователей плановой 19, фронтальной 20 и профильной 21 проекций ЗП, первый и второй входы блока экстраполяции видеоотображения 15 соединены соответственно с выходами вычислителя параметров текущего динамического состояния 6 и вычислителя прогнозируемой траектории 8, вычислитель параметров синтезируемых проекций 16 соединен вторым входом с выходом вычислителя параметров текущего динамического состояния 6, первые (а) входы формирователей синтезируемой фронтальной и синтезируемой профильной проекций рельефа соединены со вторым выходом компаратора, а второй (б), третий (в) и четвертый (г) входы формирователей синтезируемых фронтальной 17 и профильной 18 проекций соединены соответственно с выходами вычислителя параметров синтезируемых проекций 16, определителя координат 7 и блока экстраполяции видеоотображения 15, соединенного выходом также с четвертым (г) входом формирователя плановой проекции рельефа 13, выход которого соединен с первым входом формирователя совмещенной плановой проекции рельефа и ЗП 22, первые входы формирователей совмещенной фронтальной 23 и совмещенной профильной 24 проекций соединены соответственно с выходами формирователей синтезируемой фронтальной 17 и синтезируемой профильной 18 проекций рельефа, вторые входы упомянутых формирователей совмещенной плановой 22, совмещенной фронтальной 23 и совмещенной профильной 24 проекций соединены соответственно с выходами формирователей плановой 19, фронтальной 20 и профильной 21 проекций ЗП, а выходы упомянутых формирователей совмещенных проекций (22, 23, 24) образуют выход видеогенератора 4.
Вариант устройства, приведенный на фиг.10, содержит следующие дополнительные связи и блоки: формирователь плановой проекции рельефа, вычислитель параметров синтезируемых проекций рельефа и формирователи плановой, фронтальной и профильной проекций защитного пространства выполнены с масштабирующими входами (м), соединенными с выходом блока управления, а выход видеогенератора соединен с входом дисплея через блок вывода видеоотображения 25, управляющий вход которого подключен к выходу блока управления.
Устройство на фиг.9 работает следующим образом.
Обнаружитель препятствий 2 по информации, поступающей на его входы с выхода навигационной системы 1, с выхода базы данных рельефа 12, с выхода базы аэронавигационной информации 10 и с выхода формирователя ЗП 14 выполняет следующие функции, аналогичные прототипу: определяет координаты ЛА в определителе координат 7, вычисляет прогнозируемую траекторию в вычислителе прогнозируемой траектории 8, вычисляет параметры текущего динамического состояния ЛА в вычислителе параметров текущего динамического состояния 6, а компаратор 9, в отличие от прототипа, определяет наличие совпадения пространства элементов базы данных рельефа с ЗП, а не с прогнозируемой траекторией, используемой в прототипе для этой цели вместо ЗП.
По информации о параметрах текущего динамического состояния, координатах ЛА и прогнозируемой траектории, поступающей на входы "б" и "г" с выходов обнаружителя препятствий 2, а также по информации, поступающей на вход "а" с выхода навигационной системы 1 и на вход "в" с выхода базы аэронавигационной информации 10, блок формирования ЗП 14 производит формирование ЗП, информация о котором поступает на компаратор 9, входящий в состав обнаружителя препятствий 2, для сравнения с элементами рельефа. Если при сравнении ЗП с элементами рельефа обнаруживается пространство, принадлежащее как ЗП, так и пространству базы данных рельефа, то компаратор 9, входящий в состав обнаружителя препятствий 2, вырабатывает на выходе сигнал, поступающий на устройство сигнализации 3, предупреждающее об опасности. Одновременно данный сигнал поступает на входы "а" формирователей плановой 13, фронтальной 17 и профильной 18 проекций рельефа для выделения элементов рельефа, оказавшихся внутри ЗП.
Блок экстраполяции видеоотображения 15 по входной информации, поступающей с вычислителя прогнозируемой траектории 8 и вычислителя параметров текущего динамического состояния 6, формирует сигнал для окрашивания рельефа на плановой, профильной и фронтальной проекциях, поступающий соответственно на вход "г" формирователя плановой проекции рельефа 13, на входы "б" формирователей синтезируемой фронтальной 17 и синтезируемой профильной 18 проекций рельефа.
Сигналы, поступающие на вход компаратора 9 с выхода блока управления 11, позволяют производить отключение сигнализации.
Вычислитель параметров синтезированных проекций 16 производит вычисление параметров синтезированных профильной и фронтальной проекций рельефа по информации, поступающей с выхода вычислителя параметров текущего динамического состояния 6 и с выхода формирователя ЗП 14.
Формирователь плановой проекции рельефа 13, входящий в состав видеогенератора 4, так же, как в прототипе, в качестве входной информации использует поступающий на вход "а" с выхода компаратора 9 сигнал определения состава элементов рельефа, вызвавших сигнализацию, поступающие на вход "б" с выхода базы аэронавигационной информации 10 данные об аэродромах, поступающую на вход "в" с выхода определителя координат 7 информацию о местонахождении ЛА и поступающую на вход "г" с выхода блока экстраполяции видеоотображения 15 информацию об окрашивании рельефа с учетом опасности, которую рельеф представляет для ЛА, учитывая текущие параметры движения ЛА и заданное время прогноза его местоположения.
Формирователь синтезируемой фронтальной проекции 17 и формирователь синтезируемой профильной проекции 18 формируют соответственно синтезированные фронтальную и профильную проекции рельефа по информации о месте нахождении ЛА, поступающей на входы "в" блоков 17 и 18 с выхода блока определителя координат 7, по информации о цветовой окраске рельефа, поступающей на входы "б" блоков 17 и 18 с выхода блока экстраполяции видеоотображения 15, по информации о составе элементов рельефа, вызвавших сигнализацию, поступающей на входы "а" блоков 17 и 18 с выхода компаратора 9, и по информации о параметрах синтезированных профильной и фронтальной проекций, поступающей на входы "г" блоков 17 и 18 с выхода вычислителя параметров синтезированных проекций 16.
Формирователь плановой проекции ЗП 19, формирователь фронтальной проекции ЗП 20 и формирователь профильной проекции ЗП 21 формируют соответственно плановую, фронтальную и профильную проекции ЗП по информации, поступающей с выхода формирователя ЗП 14.
Видеогенератор 4 производит совмещение соответствующих сформированных проекций рельефа и ЗП: формирователь совмещенной плановой проекции рельефа и ЗП 22 совмещает плановые проекции рельефа и ЗП, сформированные соответственно формирователем плановой проекции рельефа 13 и формирователем плановой проекции ЗП 19, формирователь совмещенной фронтальной проекции рельефа и ЗП 23 совмещает фронтальные проекции рельефа и ЗП, сформированные соответственно формирователем синтезированной фронтальной проекции рельефа 17 и формирователем фронтальной проекции ЗП 20, формирователь совмещенной профильной проекции рельефа и ЗП 24 совмещает профильные проекции рельефа и ЗП, сформированные соответственно формирователем синтезированной профильной проекции рельефа 18 и формирователем профильной проекции ЗП 21.
Видеогенератор 4 по информации, поступающей с выходов соответствующих формирователей совмещенных проекций 22, 23 и 24, формирует на выходе видеосигнал, поступающий на вход дисплея 5 для отображения совмещенной проекции рельефа и ЗП.
В устройстве на фиг.10 дополнительно реализована функция ручного выбора экипажем видеоотображения необходимой совмещенной проекции с помощью блока выбора видеоотображения совмещенных проекций 25. Одновременно реализуется функция ручного выбора экипажем масштаба видеоотображения трех совмещенных проекций подачей масштабирующего сигнала с выхода блока управления 11 на масштабирующие входы (м) формирователя плановой проекции рельефа 13, вычислителя параметров синтезируемых проекций 16, формирователя плановой проекции защитного пространства 19, формирователя фронтальной проекции защитного пространства 20 и формирователя профильной проекции защитного пространства 21.
Т.о., заявляемый способ и устройство на его основе позволяют реализовать новые преимущества систем предупреждения столкновения ЛА с землей:
- повысить информированность экипажа о конфигурации рельефа, представляющего опасность, путем отображения трех проекций подстилающей поверхности с использованием трех координатных сеток и выделения элементов рельефа внутри защитного пространства и тем самым упростить задачу по принятию решения о необходимости маневрирования и выбору характера маневра для ухода от опасного рельефа;
- уточнить степень опасности, которую представляет впереди расположенный рельеф, путем отображения в одном масштабе трех совмещенных проекций рельефа и ЗП и выделения элементов рельефа, оказавшихся внутри ЗП;
- упростить задачу экипажу по принятию решения о необходимости маневрирования и выбору характера маневра для ухода от представляющего опасность рельефа путем повышения информированности экипажа о конфигурации рельефа и уточнения степени опасности, которую он представляет;
- расширить возможности экипажа по предотвращению опасного сближения с рельефом путем обеспечения возможности анализа в трех совмещенных проекциях конфигурации впереди расположенного рельефа как при опасном сближении с рельефом, так и в любое удобное для экипажа время.
Реализация перечисленных преимуществ позволяет повысить надежность предсказания возможности столкновения ЛА с землей и расширить возможности экипажа по предотвращению опасного сближения с рельефом путем повышения объема информации о взаимном расположении ЛА и опасного рельефа (отображения трех проекций рельефа вместо двух, использования трех координатных сеток вместо двух, отображения проекций защитного пространства, выделения элементов рельефа внутри защитного пространства) и повысить эргономичность представления информации экипажу путем отображения совмещенных проекций рельефа и защитного пространства, использования вертикальной скорости при окрашивании рельефа и выделения элементов рельефа внутри защитного пространства.
Предложенный способ и его варианты полностью реализуются в устройствах, представленных на фиг.9-10.
Блоки, входящие в состав устройств, представленных на Фиг.9-10, реализуются с использованием аппаратно-программных модулей, построенных на базе широко распространенных стандартных устройств аналоговой и цифровой вычислительной техники (блоки 2-25), либо входят в состав бортового оборудования ЛА (блок 1).
Для разработки программного обеспечения, реализующего необходимые функции упомянутых устройств, использовались стандартные языки программирования ("С", "C++"), программно-математическое обеспечение фирм "MICROSOFT", "BORLAND" и известные формулы геодезических преобразований [6].
Блок 3 реализован на базе аналоговых звуковых кодеров и декодеров фирмы "TEXAS INSTRUMENTS", операционных усилителей фирмы "MAXIM" и программируемых логических интегральных схем фирмы "ALTERA".
Блок 5 реализован на базе жидкокристаллической матрицы фирмы "SHARP".
Блоки 6-9 (входящие в состав блока 2), а также блоки 13-21 реализованы на базе интегрированного модуля фирмы "AMPRO" с процессорным модулем фирмы "ANALOG MICRODEVICSES", работающего от источника питания фирмы "АЛЕКСАНДЕР ЭЛЕКТРИК". В указанных блоках также используются интерфейсные микросхемы фирмы "ANALOG DEVICES" и прецизионные программируемые усилители фирмы "TEXAS INSTRUMENTS".
Блоки 10 и 12 реализованы на базе постоянных запоминающих устройств "DiskOnChip" фирмы "M-SYSTEMS". Блоки 11 и 25 реализованы на базе переключателей фирмы "BOURNS", соединителей фирмы "MOLEX", преобразователей напряжений фирмы "MAXIM".
Блоки 22-24 (входящие в состав блока 4) реализованы на базе видеоконтроллера фирмы "SHARP", видеоусилителей фирмы "MAXIM" и высоковольтных преобразователей фирмы "TDK".
Математическое моделирование, полунатурные и летные испытания системы СРПБЗ, в которой реализован заявляемый способ, показывают, что вероятность аварийных летных ситуаций по сравнению с прототипом снижается на 20-25%.
Проведенные летные испытания на самолетах Ту-154, Як-40 и Як-42 показали эффективность использования заявляемого устройства.
Т.о. заявляемое изобретение чрезвычайно перспективно для использования на борту ЛА для снижения вероятности летных происшествий.
Литературные источники, принятые во внимание:
1. Патент Франции №2731824, кл. G 08 G 5/04, заявл. 17.03.1995 г., опубл. 20.09.1998 г.
2. Патент Франции №2747492, кл. G 08 G 5/04, заявл. 15.04.1996 г., опубл. 17.10.1997 г.
3. Патент Франции №2773609, кл. G 01 C 5/00, заявл. 12.01.1998 г., опубл. 16.07.1999 г.
4. Патент США №5892462, кл. G 08 G 5/04, заявл. 20.06.1997 г., опубл. 06.04.1999 г.
5. Патент США №6021374, кл. G 06 F 163/00, заявл. 09.10.1997 г., опубл. 01.02.2000 г.
6. Закатов П.С. Курс высшей геодезии. М., Недра, 1976.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЯ САМОЛЕТОВ И ВЕРТОЛЕТОВ С РЕЛЬЕФОМ МЕСТНОСТИ И УСТРОЙСТВО НА ЕГО ОСНОВЕ | 2008 |
|
RU2376645C1 |
| СПОСОБ ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА С РЕЛЬЕФОМ МЕСТНОСТИ И УСТРОЙСТВО НА ЕГО ОСНОВЕ | 2006 |
|
RU2301456C1 |
| СПОСОБ ПРЕДУПРЕЖДЕНИЯ УГРОЗЫ СТОЛКНОВЕНИЯ ВЕРТОЛЕТА С НАЗЕМНЫМИ ПРЕПЯТСТВИЯМИ | 2009 |
|
RU2397549C1 |
| СПОСОБ ОПОВЕЩЕНИЯ О РАСПОЛОЖЕНИИ ЛЕТАТЕЛЬНОГО АППАРАТА ОТНОСИТЕЛЬНО ВЗЛЕТНО-ПОСАДОЧНЫХ ПОЛОС ПРИ ЗАХОДЕ НА ПОСАДКУ | 2009 |
|
RU2410753C1 |
| СИСТЕМА УПРАВЛЕНИЯ В ПРОДОЛЬНОМ КАНАЛЕ ПИЛОТИРУЕМЫХ И БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ В РЕЖИМЕ УВОДА С ОПАСНОЙ ВЫСОТЫ ПРИ РАБОТЕ ПО НАЗЕМНЫМ ОБЪЕКТАМ | 2016 |
|
RU2644048C2 |
| СИСТЕМА ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА С ЗЕМЛЕЙ | 2005 |
|
RU2271039C1 |
| СПОСОБ ОПОВЕЩЕНИЯ О РАСПОЛОЖЕНИИ ЛЕТАТЕЛЬНОГО АППАРАТА ОТНОСИТЕЛЬНО ВЗЛЕТНО-ПОСАДОЧНЫХ ПОЛОС ПРИ ЗАХОДЕ НА ПОСАДКУ И ПРИ ДВИЖЕНИИ ПОСЛЕ ПРИЗЕМЛЕНИЯ | 2011 |
|
RU2465652C1 |
| СПОСОБ УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2008 |
|
RU2390815C1 |
| УСТРОЙСТВО СИНТЕЗА КАРТОГРАФИЧЕСКИХ ИЗОБРАЖЕНИЙ | 2004 |
|
RU2250182C1 |
| СПОСОБ ПРЕДУПРЕЖДЕНИЯ УГРОЗЫ СТОЛКНОВЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА С ПРЕПЯТСТВИЯМИ ПОДСТИЛАЮЩЕЙ ПОВЕРХНОСТИ | 2007 |
|
RU2356099C1 |


Группа изобретений относится к технике обеспечения безопасности полетов летательных аппаратов (ЛА). Согласно способу определяют местоположение ЛА с помощью навигационной системы, производят вычисление параметров текущего динамического состояния ЛА, вычисляют прогнозируемую траекторию, формируют плановую проекцию рельефа, определяют опасный рельеф и предупреждают об опасности путем сигнализации и видеоотображения опасного рельефа. При этом после вычисления прогнозируемой траектории формируют для ЛА защитное пространство и сопоставляют его с рельефом. Профильную и фронтальную проекции рельефа синтезируют путем выбора максимальных высот рельефа в пределах информационного сканирования элементов рельефа в продольном и поперечном направлениях по отношению к направлению полета ЛА. Защитное пространство адаптируют к текущему динамическому состоянию ЛА. Далее определяют плановую, профильную и фронтальную проекции защитного пространства, совмещают упомянутые проекции защитного пространства с одноименными проекциями рельефа, формируют видеоотображение совмещенных плановых, профильных и фронтальных проекций рельефа и защитного пространства. О возможной опасности предупреждают пилота путем видеоотображения контакта профильной проекции защитного пространства с профильной проекцией рельефа и выделения на видеоотображении упомянутых совмещенных проекций элементов опасного рельефа внутри защитного пространства. В устройство, реализующее способ, введены формирователь защитного пространства, блок экстраполяции видеоотображения, вычислитель параметров синтезируемых проекций рельефа, формирователи синтезируемой фронтальной и синтезируемой профильной проекций рельефа, формирователи плановой, фронтальной и профильной проекций защитного пространства. Видеогенератор дополнительно снабжен формирователями совмещенной плановой, совмещенной фронтальной и совмещенной профильной проекций рельефа и защитного пространства. Группа изобретений позволяет повысить надежность предсказания возможности столкновения ЛА с землей и обеспечивает предотвращение опасного сближения с рельефом благодаря повышению объема информации о взаимном расположении ЛА и опасного рельефа, а также способствует повышению эргономичности представления информации экипажу. 2 н. и 6 з.п. ф-лы, 10 ил.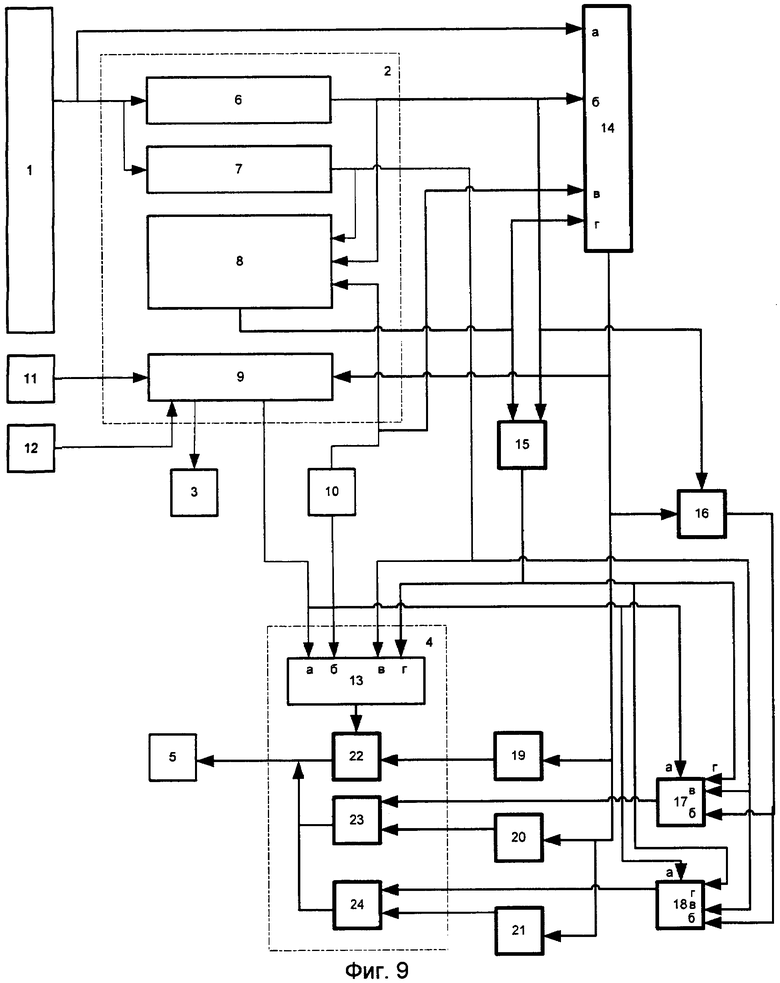
| US 6021374 А, 01.02.2000 | |||
| Объемный лестничный блок | 1978 |
|
SU802469A1 |
| Устройство для сжатия сигнала по времени | 1975 |
|
SU565399A2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЯ С ЗЕМЛЕЙ ЛЕТАТЕЛЬНОГО АППАРАТА С УСОВЕРШЕНСТВОВАННОЙ СИСТЕМОЙ ВИЗУАЛИЗАЦИИ | 1999 |
|
RU2211489C2 |
| RU 97106076 A, 10.04.1999. | |||

