Изобретение относится к области авиационной техники, а именно к бортовым системам предотвращения столкновения с землей, сигнализирующим пилоту об угрозе такого столкновения.
Заявленный способ может быть использован также на судах, перемещающихся под водной поверхностью (на подводных лодках).
Известен способ формирования аварийной и предупредительной сигнализации, направленной на предупреждение о возможном столкновении воздушного судна с элементами подстилающей поверхности по заявке РФ №2002103711 А, МПК 7 G 08 G 5/04, опубл. 02.10.03 г. (www.fips.ru). Известный способ заключается в том, что формируют базу данных рельефа подстилающей поверхности (БДРПП), включающую в цифровой форме сведения как о естественных, так и о искусственных препятствиях, аэронавигационную базу данных (АНБД), базу данных летно-технических характеристик (ЛТХ) воздушного судна (ВС), затем формируют зону сигнализации, выделяют препятствия подстилающей поверхности (ПП), представляющие угрозу столкновения с ВС. После чего вычисляют траекторию полета, рассчитывают и корректируют сигналы, предупреждающие экипаж ВС о возможном столкновении. Причем для экипажа индицируют сигнал, соответствующий экстремальному препятствию, т.е. препятствию, представляющему наибольшую угрозу столкновения.
Недостатком данного аналога является относительно невысокая информативность вырабатываемых сигналов об угрозе столкновения с элементами подстилающей поверхности. Это обусловлено тем, что в известном способе вырабатываются только предупредительные и аварийные сигналы, не содержащие рекомендаций на совершение маневра ВС, устраняющего угрозу столкновения с подстилающей поверхностью.
Известен также способ для отображения информации о земной поверхности для винтокрылого ВС по патенту США № US 6833797 В2, МПК G 08 B 21/00 от 21.12.2004. Известный способ заключается в том, что формируют две зоны обнаружения препятствий, выделяют препятствия на подстилающей поверхности, попадающие в эти зоны, вычисляют удаление вершин выделенных препятствий от высоты полета ВС, генерируют соответствующие им электрические сигналы, которые отображают в качестве информационных сигналов на дисплее. Причем электрические сигналы, соответствующие отличающимся по высоте препятствиям, отображают различными цветами.
Недостатком данного аналога также является относительно невысокая информационность вырабатываемых информационных сигналов экипажу ВС для принятия решения на совершение маневра, предотвращающего угрозу столкновения с препятствием на подстилающей поверхности. Это объясняется тем, что вырабатываемые информационные сигналы требуют от экипажа дополнительной оценки степени их действительной угрозы столкновения, что приводит к задержке принятия решения и возможной неадекватной реакции экипажа на предотвращение существующей угрозы столкновения.
Наиболее близким по своей технической сущности к заявленному является известный способ снижения риска столкновения ВС с земной поверхностью ("Display for terrain avoidance") по заявке № WO 2004084152, МПК G 08 G 05/04 от 30.09.2004 (http://v3.espacenet.com).
Способ-прототип заключается в том, что предварительно формируют базу данных рельефа подстилающей поверхности, АНБД, базу данных ЛТХ ВС. В процессе полета выделяют препятствия по курсу полета, представляющие угрозу столкновения ВС с выделенными препятствиями. Затем вычисляют одну или несколько траекторий полета ВС, исключающих его столкновение с экстремальным из числа выделенных препятствий. По вычисленной траектории рассчитывают параметры уклонения ВС от препятствия, в соответствии с значениями которых генерируют электрические сигналы управления и отображают их на дисплее в качестве рекомендаций для экипажа ВС на совершение маневра.
В отличие от рассмотренных выше аналогов, в способе-прототипе, кроме информационных сигналов об угрозе столкновения, вычисляют также сигналы, рекомендующие экипажу изменение режима полета, с целью предотвращения угрозы столкновения ВС с препятствием, что несколько облегчает принятие решения экипажем.
Однако способу-прототипу присущи следующие недостатки.
1. Относительно невысокая информативность сигналов, предупреждающих об угрозе столкновения, обусловленная отсутствием данных о структуре зоны просмотра пространства.
2. Высокая вероятность генерации сигналов псевдотревог, обусловленных тем, что анализу подлежат препятствия, лежащие только по курсу полета, высота которых представляет угрозу столкновения
3. Высокая вероятность возникновения угрозы столкновения при выполнении ВС разворота, т.к. при этом на внезапно возникающее препятствие в процессе эволюции ВС система предупреждения об угрозе столкновения формирует сигнал, время реагирования на который у экипажа может оказаться недостаточным или привести к выполнению экипажем неоправданно экстремального маневра. Кроме того, угроза столкновения возрастает при возможных изменениях скорости ветровых потоков, которые в прототипе не учитываются.
Заявленное техническое решение расширяет арсенал средств данного предназначения.
Кроме того, целью изобретения является разработка способа обнаружения и предупреждения угрозы столкновения воздушного судна с препятствиями подстилающей поверхности, обеспечивающего повышение информативности сигналов об угрозе столкновения, исключение ложных тревог и снижение вероятности возникновения угрозы столкновения при маневрировании ВС за счет формирования трехмерной структуры области просмотра возможных препятствий и динамического изменения конфигурации этой области при эволюциях ВС и при изменениях скорости ветра, а также учета возможной нестабильности выдерживания экипажем ВС рекомендуемой траектории облета препятствия, вызванной вариацией силы ветра и другими причинами.
Поставленная цель достигается тем, что в известном способе обнаружения и предупреждения угрозы столкновения ВС с препятствиями подстилающей поверхности, заключающемся в том, что предварительно формируют базу данных рельефа подстилающей поверхности, включающую данные об искусственных препятствиях на земле, аэронавигационную базу данных, базу данных летно-технических характеристик воздушного судна, выделяют в процессе полета препятствия подстилающей поверхности, представляющие угрозу столкновения с ними воздушного судна, вычисляют одну или более траекторий полета, исключающих угрозу столкновения воздушного судна с экстремальными из числа выделенных препятствий, рассчитывают параметры уклонения воздушного судна от препятствия, генерируют электрические сигналы управления, которые отображают с помощью средств индикации для их учета при принятии решения экипажем на маневр воздушным судном, дополнительно в процессе полета вычисляют границы последовательно примыкающих друг к другу защитных зон. В состав защитных зон входят зона управления и зона внимания. Из числа препятствий подстилающей поверхности выделяют препятствия, попавшие в зоны управления и внимания, причем траектории полета и параметры уклонения воздушного судна, исключающие его столкновение с препятствиями, вычисляют с учетом всех препятствий, находящихся в зоне управления. Каждая вычисленная траектория, исключающая угрозу столкновения воздушного судна с препятствием, является осью соответствующей области прогноза движения, ширина которой зависит от скорости и высоты полета воздушного судна. В соответствии с значениями вычисленных параметров уклонения генерируют электрические сигналы управления и дополнительно для зон управления и внимания генерируют информационные сигналы о находящихся в этих зонах препятствиях подстилающей поверхности. Информационные сигналы и сигналы управления отображают для обеих защитных зон одновременно.
Новым также является то, что в горизонтальной плоскости боковые границы защитных зон и угол раствора между ними α [рад], вычисляют как функцию путевой скорости Wп [м/с], времени прогноза Тп [с], установленного для данного типа воздушного судна, высоты полета Н [м] и угловой скорости разворота Ω [рад/с]. Причем в сложных условиях полета (над горной местностью, в условиях плохой видимости, ночью) ранее вычисленный угол α увеличивают до значений в интервале 80÷90°.
В вертикальной плоскости положение границ защитных зон вычисляют для каждого этапа и режима полета как функцию путевой скорости Wп, вертикальной скорости Wу [м/с], времени прогноза Тп, установленного для данного типа воздушного судна, и изменения скорости встречного или попутного ветра ΔWв [м/с2].
Траектории полета, исключающие угрозу столкновения воздушного судна с выделенными препятствиями, вычисляют по отношению к экстремальным препятствиям, выделенным в зоне управления.
В качестве средства индикации информационных сигналов и сигналов управления используют дисплей и средства звуковой и речевой индикации. Причем информационные сигналы, отображающие выделенные препятствия подстилающей поверхности в зоне управления, отличают цветом от цвета информационных сигналов в зоне внимания, а электрические сигналы управления отображают на дисплее с указанием их численных значений.
Благодаря указанной новой совокупности существенных признаков за счет формирования трехмерных защитных зон (зон управления, внимания и зоны аварии), а также реализации динамического изменения конфигурации защитных зон в процессе эволюции ВС, достигается своевременность формирования сигналов о возможных угрозах столкновения, исключение ложных сигналов угроз и обеспечивается своевременность выработки рекомендаций экипажу ВС на выполнение маневра, что снижает вероятность столкновения ВС с препятствиями подстилающей поверхности. Проведенный анализ уровня техники позволил установить, что аналоги, характеризующиеся совокупность признаков, тождественных всем признакам заявленного технического решения, отсутствуют в известных носителях информации, что указывает на соответствие заявленного способа условию патентоспособности "новизна".
Результаты поиска известных решений в данной и смежных областях техники с целью выявления признаков, совпадающих с отличительными от прототипа признаками, показали, что они не следуют явным образом из уровня техники. Из уровня техники также не выявлена известность влияния предусматриваемых существенными признаками заявленного изобретения преобразований на достижение указанного технического результата. Следовательно, заявленное изобретение соответствует условию патентоспособности "изобретательский уровень".
Заявленный способ поясняется чертежами, на которых показаны:
фиг.1 - рисунок, поясняющий структуру защитных зон;
фиг.2 - рисунок, поясняющий порядок обнаружения препятствий в зонах управления и внимания;
фиг.3 - рисунок, поясняющий динамику изменения положения защитных зон при вертикальных эволюциях ВС;
фиг.4 - рисунок, поясняющий конфигурацию защитных зон при эволюциях защитных зон при эволюциях ВС в горизонтальной плоскости;
фиг.5 - структурная схема бортового устройства, реализующего заявленный способ;
фиг.6 - алгоритм работы процессора;
фиг.7, 8 - вид экрана дисплея с отображением информационных и управляющих сигналов соответственно при развороте и при прямолинейном полете.
В условиях непрерывно возрастающей интенсивности полетов, увеличения скорости полетов и пассажировместимости ВС, а также применения новой практики полетов по свободным траекториям обостряется противоречие между требованиями высокого уровня безопасности полетов и техническими решениями (возможностями) бортового приборного оборудования, предназначенного для предотвращения угрозы столкновения с препятствиями.
Известные пути решения этой проблемы основываются на включении в состав бортового оборудования специальных систем предупреждения столкновения, использующих информацию о препятствиях на подстилающей поверхности (ПП), однако, они не в полной мере соответствуют требованиям по безопасности полетов, так как вырабатываемые ими сигналы недостаточно информативны, не учитывают динамику изменения режимов полета, изменений метеоусловий и других дестабилизирующих факторов.
Возможное направление решения возникшего противоречия может быть найдено путем более глубокого и последовательного анализа угрозы столкновения за счет расширения зоны просмотра, более адекватной оценки угроз, повышения информативности и своевременности выдачи экипажу сигналов предупреждения и управления режимами полета, при которых исключаются угрозы столкновения при эволюциях ВС и минимизируется вероятность принятия экипажем неадекватных действий (маневров).
Эта задача решается в заявленном способе.
Возможность реализации заявленного способа с достижением указанного технического результата объясняется следующим образом.
На этапе подготовки полета предварительно формируют базы данных.
В качестве БДРПП могут использоваться цифровые карты местности, которые предварительно заносят в память бортовой системы на этапе подготовки полета с учетом планируемого маршрута полета и возможных уклонений ВС от этого маршрута (запасные аэродромы, обход грозовой деятельности и т.д.). В цифровом виде карта содержит данные о рельефе подстилающей поверхности и может использоваться для дальнейших расчетов без предварительной обработки ее данных или по правилам использования цифровых карт, которые содержатся в такой базе данных. В цифровых картах о всех возвышенностях (препятствиях), как естественных, так и искусственных, хранятся данные о их географических координатах: ϕ [град] - широта, λ [град] - долгота, h [м] - высота над земным эллипсоидом (геоидом).
АНБД включает информацию об аэропортах и содержит данные о координатах взлетно-посадочных полос (ВПП), их длинах, прямом и обратном азимутах оси ВПП, а также информацию о схемах захода на посадку и взлета. Эти данные учитывают для определения этапа и режима полета ВС (крейсерский полет, полет в зоне аэродрома, заход на посадку и т.п.). Перечисленные данные известны из нормативных документов и вносятся экипажем в бортовую систему ВС перед полетом.
База данных ЛТХ включает в себя параметры ВС, такие как взлетная масса, аэродинамические характеристики, коэффициенты подъемной силы, скороподъемность и т.п., необходимые для выработки сигналов управления на проведение маневра уклонения ВС от препятствий ПП на каждом этапе полета. Указанные данные содержатся в руководстве по летной эксплуатации ВС и также предварительно вносятся экипажем в бортовую систему.
После формирования исходных баз данных и начала полета ВС вычисляют границы защитных зон (ЗЗ), которые включают зону управления (ЗУ) 1, зону внимания 2 (ЗВ) и зону аварии 3 (ЗА) (фиг.1). Каждая зона представляет собой трехмерную область пространства, границы которой определяют в зависимости от режима и этапа полета следующим образом.
Точки изломов границ ЗЗ имеют 2 координаты: удаление от ВС и высоту относительно ВС (см. фиг.1). Угол α между боковыми границами в горизонтальной плоскости зон выбирают в пределах 10÷12° при прямолинейном полете в простых условиях (фиг.1).
Указанные границы ЗУ 1 и ЗВ 2 рассчитывают по формулам:
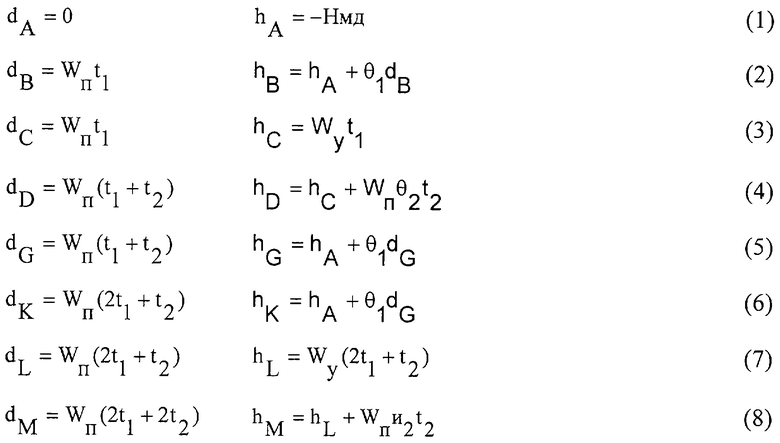
где Wп - путевая скорость, Wу - скорость изменения геометрической высоты ВС, t1, t2 - временные параметры, которые выбирают исходя из требований по безопасному маневрированию при обнаружении в ЗУ препятствий с рекомендуемыми параметрами уклонения. Полное время прогноза ТП=2(t1+t2). Значения параметров t1 и t2 составляют t1=15÷20 с и t2=10÷15 c соответственно. Нмд - минимально допустимая высота пролета над препятствием, величина которой определяет размер зоны аварии (зоны столкновения) по вертикали, попадание в которую препятствия ПП недопустимо. Значения минимально допустимой высоты пролета над препятствиями Нмд [м] определяются нормами стандарта TSO-С151а и приведены в таблице 1.
θ1 - угол наклона нижней границы зон управления и внимания,

где θ0<0 - угол наклона границы в горизонтальном полете при постоянном ветре, величина которого составляет -0,017...-0,035 рад. Wуа - прогнозируемое изменение вертикальной скорости из-за изменения скорости ветра [м/с], которую вычисляют по формуле:
Wуа=Kаaв,
где aв - параметр изменчивости ветра [м/с2], Ка - коэффициент. Порядок вычисления прогнозируемого изменения вертикальной скорости из-за изменения скорости ветра приведен в Приложении 1.
Тем самым положение нижней границы ЗЗ регулируется в зависимости от изменения скорости ветра, которое приводит к существенному изменению высоты полета. В спокойной атмосфере небольшая величина θ0 обеспечивает низкий уровень ложных тревог.
На дальних границах зоны управления 1 и зоны внимания 2 угол наклона линий CD и LM границ одинаков и составляет величину:

где θ - угол наклона траектории [рад], θ=Wу/Wп, θн - заданный угол набора высоты, определяемый летно-техническими характеристиками воздушного судна [рад] (см. фиг.1).
Примыкающая к ВС вертикальная граница ЗУ 1 отстоит от центра ВС на расстояние Rа, определяющее границу зоны аварии 3 (см. фиг.1). Значения радиуса ЗА 3 Rа определяют в соответствии с нормами стандартов ИКАО - Международной организации гражданской авиации (Приложение 10. Авиационная электросвязь. Том 4. Системы обзорной радиолокации и предупреждения столкновения. 1-е изд. Монреаль ИКАО, 1995), и приведены в таблице 2.
Ступенчатая форма структур ЗУ 1 и ЗВ 2 предназначена, с одной стороны, для обнаружения резко возвышающихся препятствий, область которых выступает за линии CD и LM (на фиг.2 Пр.1 и Пр.2). С другой стороны, исключение из предварительного обработки мало выступающих препятствий (на фиг.2 Пр.3), уклонение от которых не требует значительных изменений режима полета. В то же время относительно невысокие препятствия (на фиг.2 Пр.4 и Пр.5) при их вхождении в соответствующие зоны будут приняты для дальнейшей обработки, учета и отображения. Это, с одной стороны, гарантирует своевременность выдачи информации экипажу и одновременно исключает подачу излишней информации, отображаемой на средствах индикации, что позволяет не перегружать внимания экипажа.
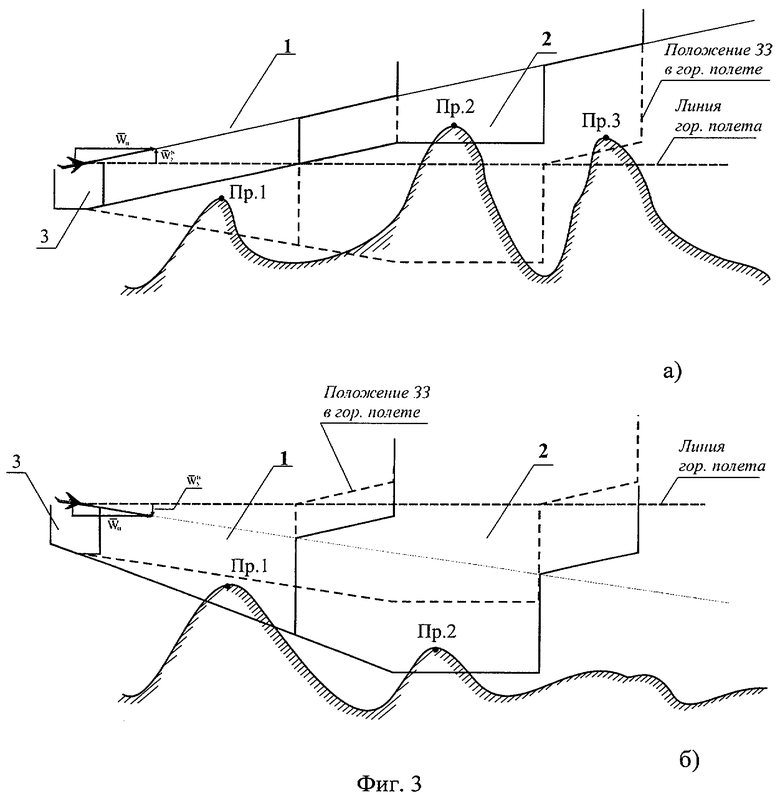
При выполнении маневров ВС в вертикальной плоскости, т.е. при появлении вертикальной составляющей вектора скорости, направленной вверх  (фиг.3а) или вектора вертикальной скорости, направленного вниз
(фиг.3а) или вектора вертикальной скорости, направленного вниз  (фиг.3б), при расчете вертикальных границ ЗУ 1 и ЗВ 2 учитывают эти составляющие и их значения в формулах (1)-(8), полагая в одном случае
(фиг.3б), при расчете вертикальных границ ЗУ 1 и ЗВ 2 учитывают эти составляющие и их значения в формулах (1)-(8), полагая в одном случае  а в другом
а в другом  При этом продольные оси ЗЗ соответственно ориентированы выше горизонтальной линии (фиг.3а) или ниже (фиг.3б) нее. В этом случае при возвышении ЗЗ (фиг.3а) из анализа и индикации исключают препятствия ранее попадавшие в ЗЗ (на фиг.4а Пр. 1 и Пр.3). При наклоне вниз областей ЗЗ (фиг.3б), наоборот, анализу и обработке подлежат препятствия, ранее не попадавшие в ЗЗ (на фиг.3б Пр.1 и Пр.2).
При этом продольные оси ЗЗ соответственно ориентированы выше горизонтальной линии (фиг.3а) или ниже (фиг.3б) нее. В этом случае при возвышении ЗЗ (фиг.3а) из анализа и индикации исключают препятствия ранее попадавшие в ЗЗ (на фиг.4а Пр. 1 и Пр.3). При наклоне вниз областей ЗЗ (фиг.3б), наоборот, анализу и обработке подлежат препятствия, ранее не попадавшие в ЗЗ (на фиг.3б Пр.1 и Пр.2).
При выполнении ВС маневра разворота в правую (фиг.4а) или левую (фиг.4а) сторону при расчете соответствующих правой (фиг.4а) и левой (фиг.4б) границ ЗЗ учитывают вектор угловой скорости разворота Ω. Суммарный угол β между боковыми границами ЗЗ будет составлять:

При этом в области ЗЗ будут попадать все препятствия по изменяющемуся в азимутальной плоскости курсу (на фиг.4 Пр.1 и Пр.2), что позволяет предотвратить вероятность возникновения препятствия, на расстоянии, время реагирования на которое у экипажа окажется недопустимо малым. Этим снижается риск столкновения с препятствием при выполнении маневра в горизонтальной плоскости.
При полетах в особых условиях, таких как, например, горная местность, для повышения уровня безопасности полетов область просмотра возможных препятствий в горизонтальной плоскости расширяют таким образом, чтобы угол α между ними составлял величину 80÷90°, независимо от величины угловой скорости разворота Ω. Тем самым увеличивается объем информации, предоставляемый экипажу, что облегчает принятие правильного решения в сложных условиях полета.
Таким образом, при выполнении маневров ВС автоматически изменяется конфигурация и ориентация ЗЗ, при которых в максимальной мере учитываются возможные препятствия в процессе маневров или их исключение из анализа, что освобождает экипаж ВС от излишней информации, чем и объясняется большая надежность работы системы.
Входящие в формулы (1)-(11) величины текущих параметров полета ВС: путевую скорость WП, и скорость изменения высоты Wу получают от спутниковой навигационной системы с использованием соответствующей аппаратуры, которой оборудованы все современные летательные аппараты. От системы воздушных сигналов получают значения вертикальной скорости Vу и истинной воздушной скорости VВ, необходимых для вычисления сигналов управления.
В общем виде система предупреждения столкновения с препятствиями подстилающей поверхности, структурная схема которой показана на фиг.5, должна включать процессор (П) 1.1, к соответствующим портам которого подключены блоки базы данных рельефа подстилающей поверхности (БДРПП) 1.2, АНБД 1.3 и базы данных ЛТХ ВС (БД ЛТХ) 1.4, а также блок текущих параметров полета (ТГШ) 1.5. Выход процессора подключен к генератору электрических сигналов (ГС) 1.6, выходы которого подключены к входам соответствующего индикаторного оборудования (ИО) 1.7. Блок ТГШ 1.5 снабжен входами сигналов соответственно от спутниковой навигационной системы, например KLN90B фирмы Bendix King, и системы воздушных сигналов.
После расчета границ ЗЗ и при выполнении ВС соответствующего этапа полета из БДРПП 1.2 выделяют в пределах границ ЗЗ все препятствия, высоты которых попадают в эти зоны. Алгоритм работы процессора приведен на фиг.6. Для вычисления границ ЗЗ на порты П1, П2 и П3 от соответственно блоков БДРПП 1.2, АНБД 1.3 и ТПП 1.5 поступают соответствующие параметры, позволяющие вычислить эти границы в соответствии с формулами (1)-(11).
На порт П4 процессора от блока БДРПП 1.2 поступают данные о возможных препятствиях, для каждого из которых известны его широта ϕ, долгота λ и высота h, а именно расстояние по местной вертикали между поверхностью земного эллипсоида (геоида) и соответствующей точки подстилающей поверхности. Затем по вычисленным параметрам ЗЗ и полученным данным о высотах и координатах препятствий выделяют те препятствия, которые попадают в пределы ЗЗ. При их не попадании дальнейшей обработке эти препятствия не подлежат. При попадании препятствий в ЗЗ по данным БДРПП 1.2, поступающим на порт П5, и от блока АНБД 1.3 порт П6 и от блока ТПП 1.5 на порт П7, АНБД 1.3 и данных о текущих параметрах вычисляют одну или несколько траекторий уклонения ВС от препятствия. С этой целью для каждого элемента рельефа рассчитывают его удаление De от ВС, азимут Ae и относительный пеленг Ре=Ae-Ψ как разность между азимутом и путевым углом.
В виду того, что при полете ВС в силу воздействия на него ряда дестабилизирующих факторов (например, наличие турбулентности) выдержать строго траекторию полета сложно, и будут иметь место некоторые отклонения ВС от рекомендуемой траектории. Чтобы с гарантией исключить вероятность опасного сближения с препятствиями в этих условиях, каждую вычисленную траекторию представляют осью области прогноза, ширина которой соответствует размеру зоны аварии.
В качестве команд управления используют рекомендуемые вычисленные вертикальные скорости, а именно достаточную вертикальную скорость Vyd (при прямолинейном полете) и необходимую вертикальную скорость Vун (при выполнении разворота). В качестве дополнительной информации вычисляют достаточную Нd и необходимую Нн высоты полета и относительные пеленги Pе элементов рельефа.
Достаточную вертикальную скорость Vуd вычисляют по формуле:

Пример расчета достаточной вертикальной скорости Vyd приведен в Приложении 2.
Необходимую вертикальную скорость Vун вычисляют аналогичным образом для зоны управления в секторе разворота по формуле:

где ΔWyp - наибольшая величина из всех приращений вертикальной скорости, вычисленная для элементов рельефа в секторе разворота зоны управления, причем во внимание принимают только те препятствия, боковое отклонение которых от прогнозируемой траектории разворота не превышает радиуса ЗА 3. Элементу рельефа, для которого приращение скорости максимальное, также присваивается признак экстремального.
При полете с постоянным курсом, когда сектор разворота отсутствует, полагают Vун=Vyd.
На величины Vун и Vyd накладывают ограничения
Vyd≤Vym, Vун≤Vym,
где Vym - максимально допустимая вертикальная скорость, определяемая летно-техническими характеристиками воздушного судна.
Достаточную высоту Нd вычисляют по формуле:

где yc геометрическая высота воздушного судна,  - наибольшая высота рельефа по курсу, Н - текущая высота полета.
- наибольшая высота рельефа по курсу, Н - текущая высота полета.
Необходимую высоту НН аналогично вычисляют по формуле (14), где - наибольшая высота рельефа в секторе разворота.
В отсутствии сектора разворота полагаем Нн=Нd.
При реализации экипажем рекомендуемых сигналов управления ВС будет совершать полет по траектории, обеспечивающей безопасный пролет над всеми препятствиями ПП с заданным запасом по высоте Нмд.
В соответствии с вычисленными параметрами генерируют информационные и управляющие электрические сигналы, причем расчеты траектории уклонения выполняют только для препятствий, попавших в ЗУ 1. Для препятствий в ЗВ 2 генерируют электрические сигналы для их дальнейшей индикации без дополнительного анализа.
Информационные сигналы для ЗВ 2 и ЗУ 1 генерируют с учетом их дальнейшего отображения, например, на дисплее различными цветами. Так, информационные сигналы в ЗУ 1 отображают, например, красным цветом, а в ЗВ 2 - желтым, что дополнительно облегчает экипажу восприятие сигналов о препятствиях (фиг.7). На фиг.7 и 8 сигналы изображены в черно-белом цвете. Экстремальные препятствия отображают отличным цветом и/или прерывистым миганием.
Индикация управляющих сигналов может быть выполнена различным образом, в частности, как показано на фиг.7 и 8. На правой вертикальной шкале вертикальной скорости Vу [м/с] указывают рекомендуемую вертикальную скорость 5 необходимую и достаточную для пролета на безопасной высоте для экстремальных препятствий. Одновременно на этой шкале выделяют значение текущей вертикальной скорости 6 ВС (см. фиг.7).
На левой вертикальной шкале высот Н [м×10] отображают аналогичные рекомендации о высоте полета Н 7, необходимой и достаточной для исключения угрозы столкновения с экстремальным препятствием, и также информацию о текущем значении высоты полета ВС 8. На горизонтальной шкале относительных пеленгов в нижней части экрана размещают относительные значения приращений вертикальной скорости 9 и расположенных на соответствующих пеленгах (фиг.7).
Аналогичный вариант отображения на дисплее информационных и управляющих сигналов показан на фиг.8 для случая выполнения ВС разворота вправо. В этом случае на горизонтальной шкале относительных пеленгов указывают значения приращения вертикальной скорости для безопасного пролета экстремальных препятствий в секторе разворота 10 и по курсу 11.
Кроме того, при выполнении разворота на вертикальной шкале высот указывают достаточное значение высоты 12 при полете по прямому курсу и необходимое 13 - при полете в развороте. Аналогично на вертикальной шкале вертикальных скоростей выделяют достаточные значения Vyd по прямому курсу 14 и необходимые Vун 15 в развороте.
Таким образом, во всех режимах и при любых эволюциях как в вертикальной, так и в горизонтальной плоскостях экипажу ВС система предупреждения столкновений с препятствиями подстилающей поверхности формирует в полном объеме необходимую и достаточную информацию для предварительной оценки складывающейся ситуации. Также выдаются конкретные рекомендации по изменению режима полета, учитывающие максимально полно ЛТХ ВС, вероятные направления обхода препятствий, текущие параметры полета, в т.ч. и условия полета. Индикацию этих данных выполняют так, что экипажу предоставляется возможность принять предварительные и своевременные решения, исключающие экстремальные эволюции ВС, но в то же время гарантирующие уклонение от препятствий подстилающей поверхности. Тем самым, при использовании заявленного способа обнаружения и предупреждения угрозы столкновения с препятствием подстилающей поверхности оказывается возможным реализация заявленного технического результата.
Приложение 1
ПРИМЕР ВЫЧИСЛЕНИЯ ЗНАЧЕНИЯ ПРОГНОЗИРУЕМОГО ИЗМЕНЕНИЯ ВЕРТИКАЛЬНОЙ СКОРОСТИ ИЗ-ЗА ИЗМЕНЕНИЯ СКОРОСТИ ВЕТРА Wуа
Значение прогнозируемого изменения вертикальной скорости из-за изменения скорости ветра Wуа вычисляется по формуле:
Wya=Kaaв,
где 
 - коэффициент подъемной силы по углу атаки [1/град], Су - коэффициент подъемной силы, ав - параметр изменчивости ветра, [м/с2]. Для нахождения значения aB вычисляют изменение во времени разности истинной воздушной Vв, [м/с], и путевой Wп скоростей Vв-Wп. Причем для дальнейших вычислений принимают сглаженное значение найденной разницы Vв-Wп, которое вычисляется по формулам:
- коэффициент подъемной силы по углу атаки [1/град], Су - коэффициент подъемной силы, ав - параметр изменчивости ветра, [м/с2]. Для нахождения значения aB вычисляют изменение во времени разности истинной воздушной Vв, [м/с], и путевой Wп скоростей Vв-Wп. Причем для дальнейших вычислений принимают сглаженное значение найденной разницы Vв-Wп, которое вычисляется по формулам:
av=(1-hτ/τv)·av+((Vв-Wп)-(Vв1-Wп1))/τv,
ав=(1-hτ/Тv)·ав1+hτ/Тv·|аv|.
Если ав<|аv|, то ав=av.
Где τv и Tv - постоянные времени [с], hτ - шаг интегрирования [с], аv - промежуточная переменная [м/с2], Vв1, Wп1 - воздушная и путевая скорости, измеренные на предыдущем цикле интегрирования [м/с].
Приложение 2
ПРИМЕР ВЫЧИСЛЕНИЯ ДОСТАТОЧНОЙ ВЕРТИКАЛЬНОЙ СКОРОСТИ Vyd ДЛЯ УКЛОНЕНИЯ ОТ ПРЕПЯТСТВИЯ
Достаточную вертикальную скорость Уyd в секторе курса (в секторе принятого значения угла α) вычисляют следующим образом. Для каждого элемента рельефа, находящегося в зоне управления 1, вычисляют приращение вертикальной скорости ΔWye, обеспечивающее прохождение данного элемента на минимально допустимой высоте Нмд над ним:
ΔWye=ΔyeWп/De,
где Δуe>0 - превышение элемента рельефа ПП над нижней границей ЗУ 1, De - удаление элемента рельефа от ВС.
Среди элементов рельефа ПП выделяют элемент с наибольшим значением ΔWye:
ΔWyk=max(ΔWye),
а соответствующему элементу присваивается признак экстремального.
Достаточная вертикальная скорость Vyd вычисляется как сумма:
Vyd=Vy+ΔWyk,
где Vy - вертикальная скорость ВС, регистрируемая бортовой системой воздушных сигналов.






Изобретение относится к области авиационной техники, а именно к бортовым системам предотвращения столкновения с землей, сигнализирующим экипажу воздушного судна (ВС) об угрозе такого столкновения. Способ заключается в том, что предварительно формируют базу данных рельефа подстилающей поверхности, аэронавигационную базу данных, базу данных летно-технических характеристик ВС. Вычисляют границы защитных зон внимания и управления на всех этапах полета ВС. Корректируют границы защитных зон при маневрировании ВС, в зависимости от величины вертикальной скорости и изменения скорости ветра. Выделяют препятствия подстилающей поверхности, попавшие в защитные зоны, и определяют их превышения над границами зон. Формируют информационные и управляющие сигналы экипажу ВС с последующей их индикацией. Установленный порядок обработки, индикации сигналов для экипажа, а также дополнительное изменение границ защитных зон при изменении этапов и режимов полета ВС упрощают принятие решения экипажем на выполнение маневра, обеспечивающего своевременное уклонение ВС от препятствий. Технический результат заключается в повышении информативности сигналов экипажу об угрозе столкновения и снижении угрозы столкновения при маневрировании ВС. 7 з.п. ф-лы, 8 ил., 2 табл.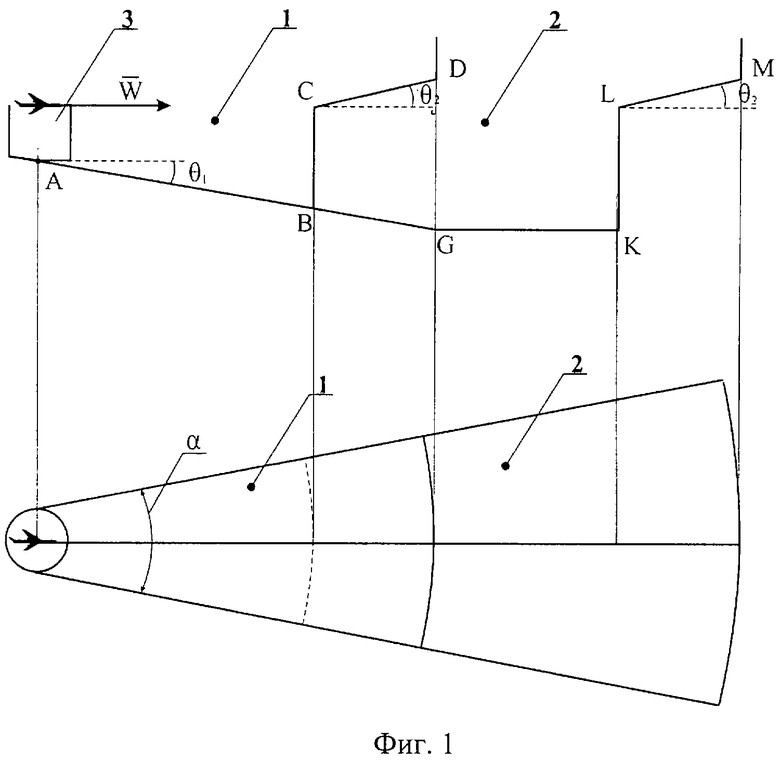
| Способ приготовления мыла | 1923 |
|
SU2004A1 |
| Топчак-трактор для канатной вспашки | 1923 |
|
SU2002A1 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА С ЗЕМЛЕЙ | 2003 |
|
RU2234739C1 |
| RU 2002103711 А, 10.02.2003. | |||

