Изобретение относится к транспортным устройствам и может быть применено в шагающей инвалидной коляске.
Известно шагающее устройство с шестью опорами, каждый привод которого выполнен в виде планетарной передачи, содержащей водило, связанное с двигателем, неподвижное центральное колесо с внутренними зубьями и зацепляющийся с ним сателлит, диаметр делительной окружности которого вдвое меньше диаметра неподвижного центрального колеса. Причем каждая опора выполнена в виде последовательно сочлененных посредством шарниров и узлов фиксации рычагов. Кроме того, устройство снабжено подвижной в окружном направлении крышкой, с диаметральным пазом и связанный с сателлитом, соосно установленным ему. Устройство снабжено также колесом, тягами, связывающими рычаги опор с колесом, и кронштейном, взаимодействующим с колесом, пазом крышки и одним из рычагов опоры. Связь сателлита с колесом выполнена в виде шлицевого соединения, а узлы фиксации - в виде храповых механизмов, соединенных с тягой (Алиев А.С. и др. Шагающее устройство. Авторское свидетельство СССР №892057, М.кл3 F16H 27/00, 1978 г.).
Известен также шагающий вездеход [Алиев А.С., Алиев С.А. «Шагающий вездеход». Патент РФ №2356775 от 14.05.2007 г.], который по своим конструктивным признакам наиболее близок предлагаемому техническому решению и может быть указан в качестве прототипа.
Шагающий вездеход содержит платформу, двигатель, приводы и связанные с ними опоры, а также блок управления изменением направления движения вездехода и кинематически связанные центральный узел изменения направления движения опор и шесть периферийных гидротелескопических опор, взаимодействующие с соответствующими узлами преобразования вращательного движения в возвратно-поступательное движение.
Центральный узел изменения направления движения гидротелескопических опор содержит первую и вторую звезды, установленные на неподвижной втулке с радиальными отверстиями с возможностью свободного вращения, угловое положение которых устанавливается подпружиненными отжимными фиксаторами. При этом первая звезда через первую цепь взаимодействует с периферийными звездами узлов изменения направления нечетных опор, а вторая звезда через вторую цепь - с периферийными звездами узлов изменения направления движения четных гидротелескопических опор.
Недостатком прототипа также является сложность конструкции опорного узла и отсутствие рулевого узла управления направления движения.
Технической задачей данного изобретения является упрощение конструкции, снижение себестоимости и повышение скорости движения.
Данная техническая задача решается путем создания новой конструкции шагающего устройства (ШУ), которая содержит аккумулятор, платформу, приводы и шесть опорных узлов, а также блок управления, кресло и рулевой узел. При этом приводы опорных узлов выполнены в виде кинематически связанных цепью первой и второй центральных и шести периферийных зубчатых колес (звезд) изменения направления движения опор, взаимодействующих с рулевым узлом. Первое центральное зубчатое колесо (звезда) с помощью первого зубчатого ремня (цепи) кинематически связано и взаимодействует с нечетными периферийными зубчатыми колесами (звездами) ориентации, а второе центральное зубчатое колесо (звезда) с помощью второй цепи взаимодействует с четными зубчатыми колесами (звездами) ориентации. Причем периферийные зубчатые колеса (звезды) ориентации взаимодействуют с соответствующими опорными узлами.
Рулевой узел содержит стойку руля, шлицевой диск, первые и вторые рычаги управления, втулки фиксации ориентации опор, первые и вторые трубчатые валы и установочные втулки. При этом верхние наконечники первого и второго трубчатых валов через установочные втулки неподвижно связаны с соответствующими рычагами управления, на которых с возможностью поступательного движения установлены соответствующие втулки фиксации ориентации опор, взаимодействующие с шлицевым диском, неподвижно связанные со стойкой руля. Кроме того, на нижних наконечниках первого и второго трубчатых валов неподвижно установлены соответствующие центральные зубчатые колеса (звезды) ориентации.
Каждый опорный узел состоит из оси поворота, первого и второго рычагов, первого и второго гидротелескопических (пневмотелескопических) устройств. При этом первый рычаг неподвижно связан с осью поворота опоры, первое гидротелескопическое (пневмотелескопическое) устройство шарнирно связано и взаимодействует с первым и вторым рычагами, а второе гидротелескопическое (пневмателескопическое) устройство шарнирно связано с осью поворота опоры и неподвижно соединено со вторым рычагом.
Второй вариант опорного узла содержит кинематически связанные вилку, поворотную платформу, первую и вторую реверсивные электродвигатели с редукторами, первую и вторую червячные пары. При этом вилка неподвижно связана с ведомой периферийной звездой и поворотной платформой, шарнирно связанной с первым звеном опоры, в корневой части которого установлено сегментное червячное колесо, взаимодействующее с первым червяком, неподвижно установленным на валу первого электродвигателя с редуктором. Второй электродвигатель, с редуктором закрепленный на первом звене опоры, через вторую червячную пару взаимодействует со вторым звеном опоры.
Третий вариант опорного узла содержит дополнительно многозвенный удлинитель опоры, состоящий из шарнирно связанных звеньев, образующих последовательную цепочку ромбов. При этом второе гидротелескопическое (пневмотелескопическое) устройство шарнирно связано с вертикальными узловыми точками первого ромба, а цилиндр его через рычаг связан и взаимодействует со штоком первого гидротелескопического устройства. Кроме того, нижний узел последнего ромба шарнирно связан с подпятником.
Четвертый вариант опорного узла состоит из кинематически связанных первого и второго звеньев, первого и второго гидротелескопических (пневмотелескопических) устройств, первого, второго и третьего рычагов. При этом первое гидротелескопическое (пневмотелескопическое) устройство шарнирно связано с первым и вторым рычагами, второе гидротелескопическое (пневмотелескопическое) устройство также шарнирно связано со вторым и третьим рычагами, которые неподвижно связаны с первым и вторым звеньями опоры соответственно. Кроме того, первый рычаг неподвижно связан с осью вращения опоры, шарнирно связанной с верхним наконечником первого звена, шарнирно связанного со вторым звеном опоры.
Блок управления при пятом варианте опорных узлов состоит из источника ЭДС, восьми последовательно коммутируемых реле, гидронасоса и двадцати четырех электрогидроклапанов, связанных шлангами с соответствующими гидротелескопическими (пневмотелескопическими) устройствами.
Пятый вариант опорного узла содержит кинематически связанные вилку, поворотную платформу, первую и вторую реверсивные электродвигатели с редукторами, первую и вторую червячные пары. При этом вилка неподвижно связана с ведомой периферийной звездой и поворотной платформой, а также шарнирно с первым звеном опоры, в корневой части которого установлена сегментная червячная шестерня, взаимодействующая с первым червячной шестерней, установленной на валу первого электродвигателя с редуктором. Второй электродвигатель, с редуктором закрепленный на первом звене опоры через вторую червячную пару, взаимодействует со вторым звеном опоры.
Второй вариант шагающего устройства содержит платформу, кинематически связанный электродвигатель с редуктором, приводы и шесть опорных узла, а также кресло, рулевой узел и второй электродвигатель с редуктором. Приводы опор выполнены в виде кинематически связанных зубчатым ремнем (цепью) центрального зубчатого колеса (звезды) и шести периферийных зубчатых колес (звезд) поступательного движения, взаимодействующих с соответствующими опорными узлами. Кроме того, блок изменения направлением движения также выполнен в виде первого и второго центральных зубчатых колес (звезд) ориентации, взаимодействующих с рулевым узлом. При этом первое центральное зубчатое колесо (звезда) ориентации с помощью первого зубчатого ремня (цепи) кинематически связано и взаимодействует с нечетными периферийными зубчатыми колесами (звездами) ориентации, а второе центральное зубчатое колесо (звезда) ориентации с помощью второго зубчатого ремня (цепи) взаимодействует с четными зубчатыми колесами (звездами) ориентации. Причем периферийные зубчатые колеса (звезды) ориентации взаимодействуют с соответствующими опорными узлами.
Шестой вариант опорного узла состоит из поворотной платформы, связанной с периферийным зубчатым колесом (звездой) ориентации, на которой установлены кинематически связанные ведущий первый вал, первая, вторая, третья, четвертая, пятая конические шестерни, первая, вторая цилиндрические шестерни, второй (гибкий) вал, первая и вторая червячные пары. Они взаимодействуют с первым и вторым звеньями опоры, а также электромагнитом, подключенным к блоку управления. При этом на втором валу неподвижно установлены первая цилиндрическая, вторая, третья и четвертая конические шестерни. Кроме того, первый электромагнит взаимодействует со вторым валом и обеспечивает поочередное взаимодействие ведущей конической шестерни то через вторую коническую шестерню, цилиндрическую пару шестерней и первую червячную пару с первым (верхним) звеном опоры, то через третью, четвертую и пятую шестерни, гибкий вал с удлинителем и вторую червячную пару со вторым (нижним) звеном опоры.
Седьмой вариант опорного узла состоит из поворотной платформы, связанной с периферийной звездой ориентации, на которой установлены кинематически связанные ведущей первый вал, первая, вторая, третья, четвертая, пятая конические шестерни, первая, вторая цилиндрические шестерни, второй и третий валы, первая и вторая червячные пары, взаимодействующие с первым и вторым звеньями опоры, а также шестая, седьмая и восьмая конические шестерни, первый и второй электромагниты, подключенные к блоку управления. При этом шестая и седьмая конические шестерни периодически входит в сцепление и взаимодействуют с восьмой конической шестерней, неподвижно установленной на сердечнике второго электромагнита, имеющей возможность продольного смещения вдоль оси колебания первого звена опоры.
Шагающее устройство при седьмом варианте опорных узлов содержит дополнительно узел дистанционного изменения направления движения. Он состоит из оси вращения, внутренней и внешней трубчатых валов, нижних и верхних зубчатых колес (звезд) и зубчатых ремней (цепей) ведущей первой и второй ведомых конических шестерен электродвигателя, и третьего электромагнита. Стержень третьего электромагнита служит выдвижной осью ведомых конических шестерен и неподвижно связан с первой и второй вилками переключателя шестерен и взаимодействует с пружиной. При этом ведущая шестерня по очереди взаимодействует с первой и второй ведомыми коническими шестернями, установленными с возможностью продольного смещения на верхних наконечниках со шлицевыми выступами внутреннего и внешнего трубчатых валов, на нижних наконечниках которых неподвижно установлены нижнее и верхнее зубчатые колеса (звезды) соответственно.
Блок управления состоит из источника ЭДС, восьми последовательно коммутируемых реле, гидронасоса и двадцати четырех электрогидроклапанов, связанных шлангами с соответствующими гидротелескопическими (пневмотелескопическими) устройствами.
На фиг.1 представлен вид сбоку на шагающее устройство.
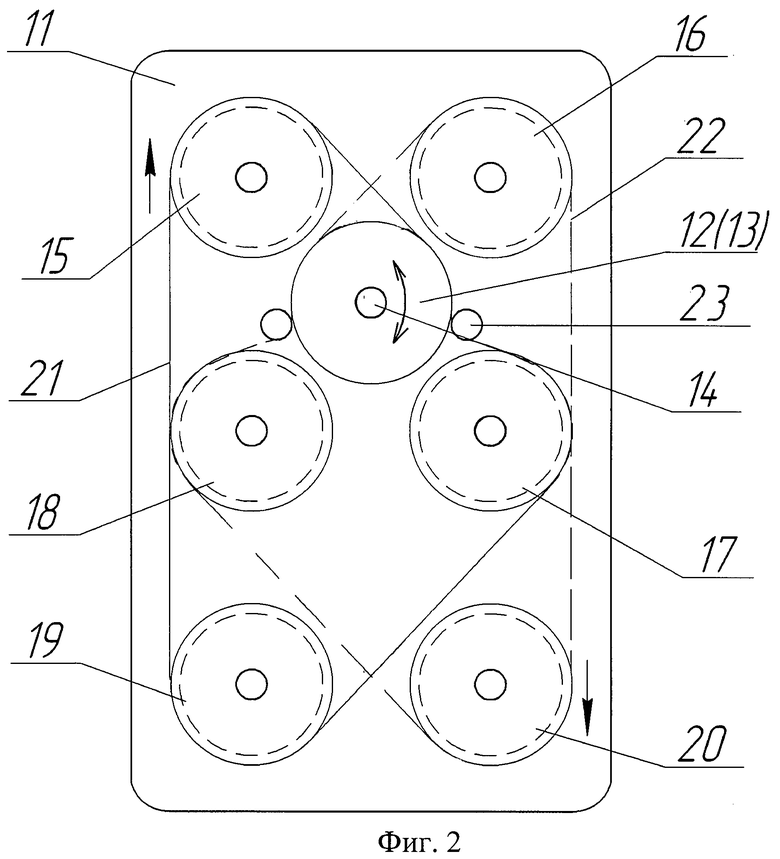
На фиг.2 представлен вид сверху на платформу при снятой крышке.
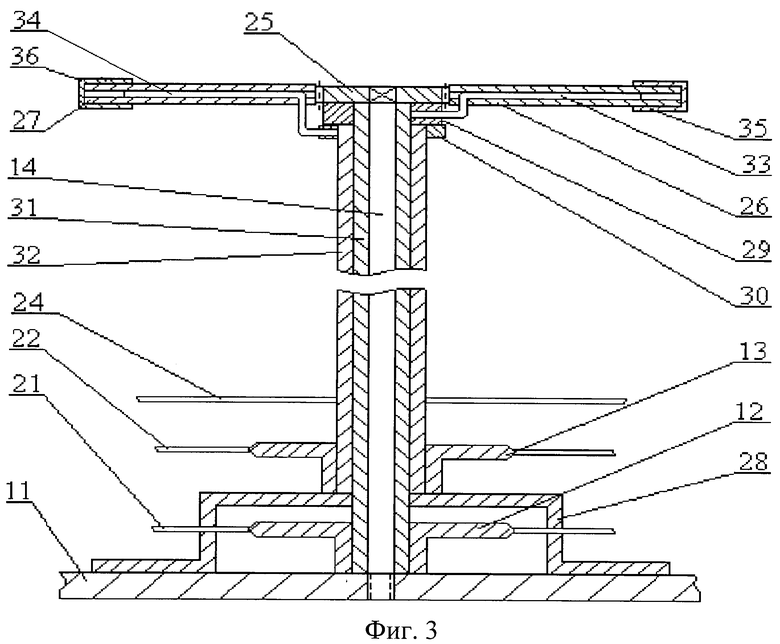
На фиг.3 представлена конструкция рулевого узла, где позиции 11-22 те же, что на фиг.2.
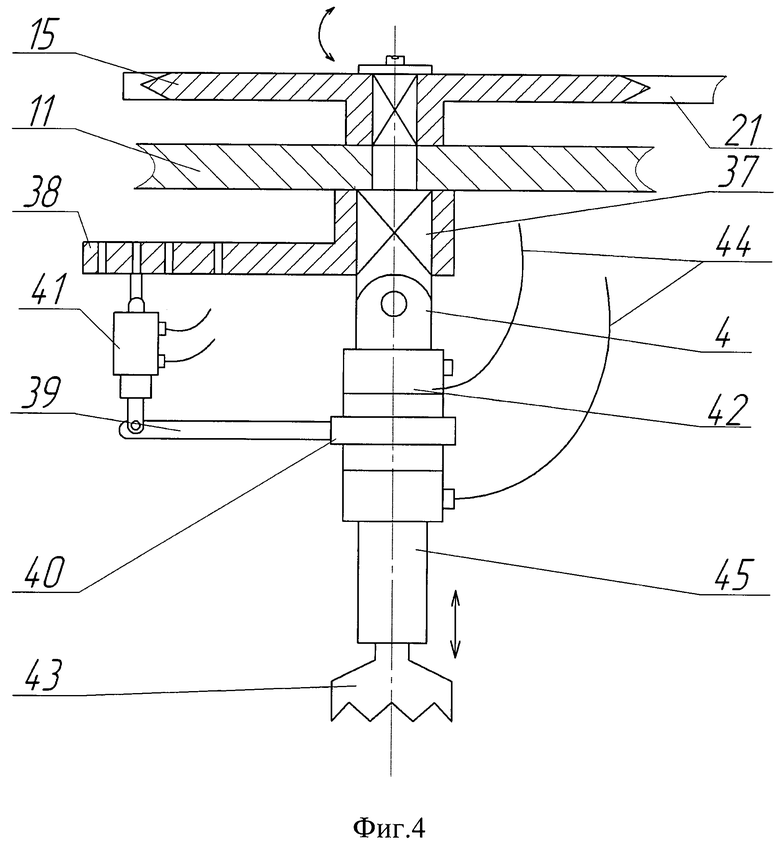
На фиг.4 представлена конструкция первого варианта опорного узла.
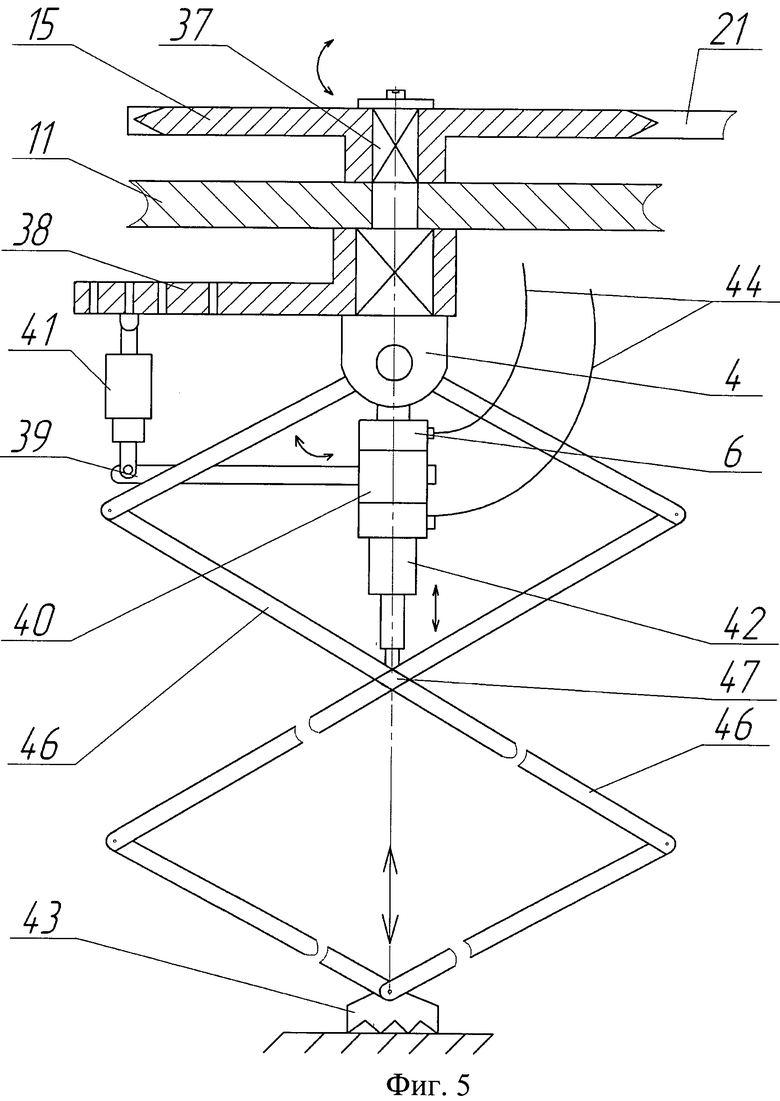
На фиг.5 представлена конструкция второго варианта опорного узла, где позиции 4-44 те же, что на фиг.4.
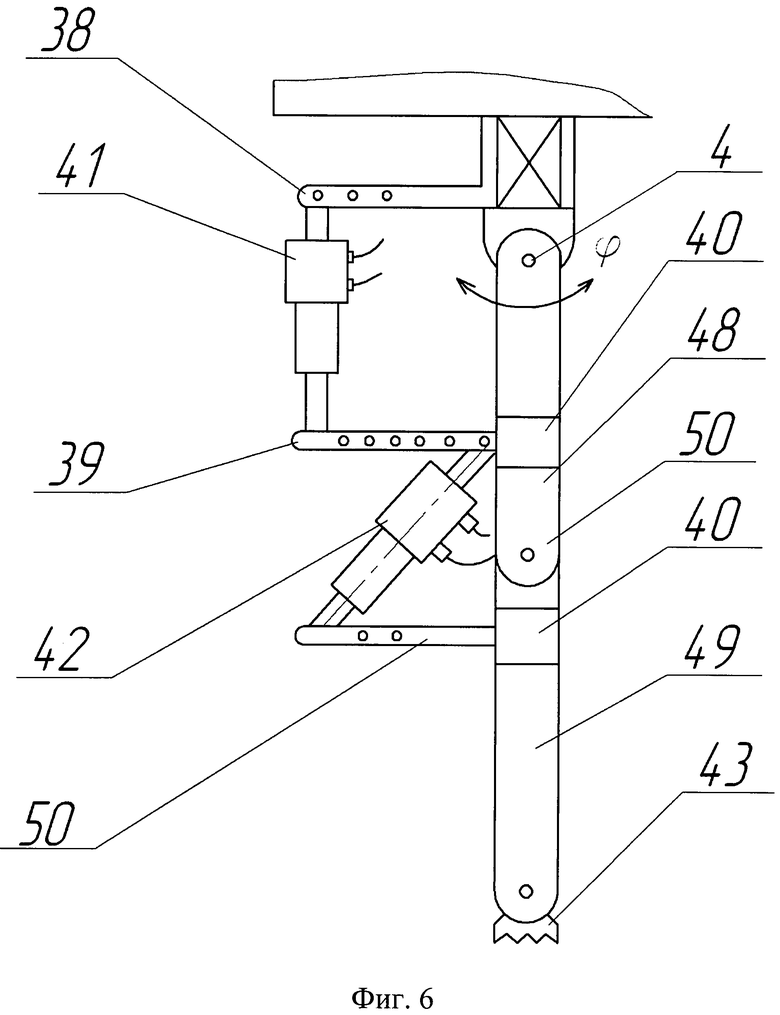
На фиг.6 представлена конструкция третьего варианта опорного узла, где позиции 4-44 те же, что на фиг.4.
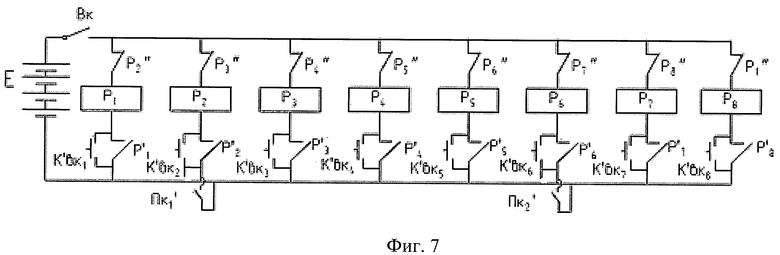
На фиг.7 представлена электрическая схема блока управления.
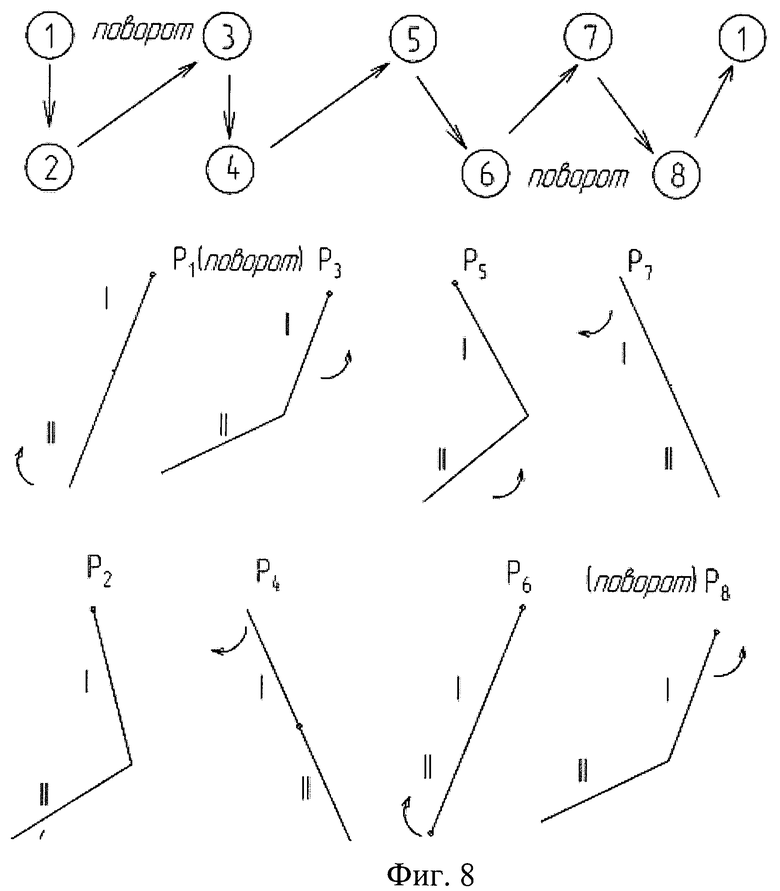
На фиг.8 представлена последовательность включения нечетных и четных гидроцилиндров (ГТУ1, ГТУ2) в режиме подъема, опускания и продольного перемещения опоры, а также схема ориентации первого и второго звеньев опоры для третьего варианта опорного узла.
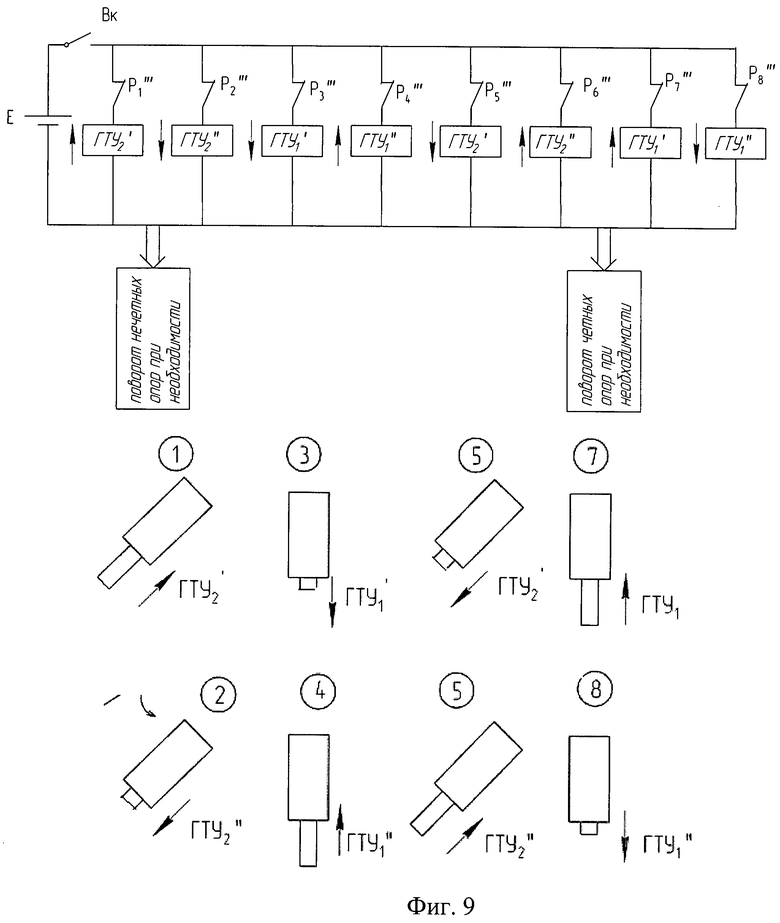
На фиг.9 представлена последовательность включения ГТУ1 и ГТУ2 четных и нечетных опор, которая задается блоком управления (фиг.7).
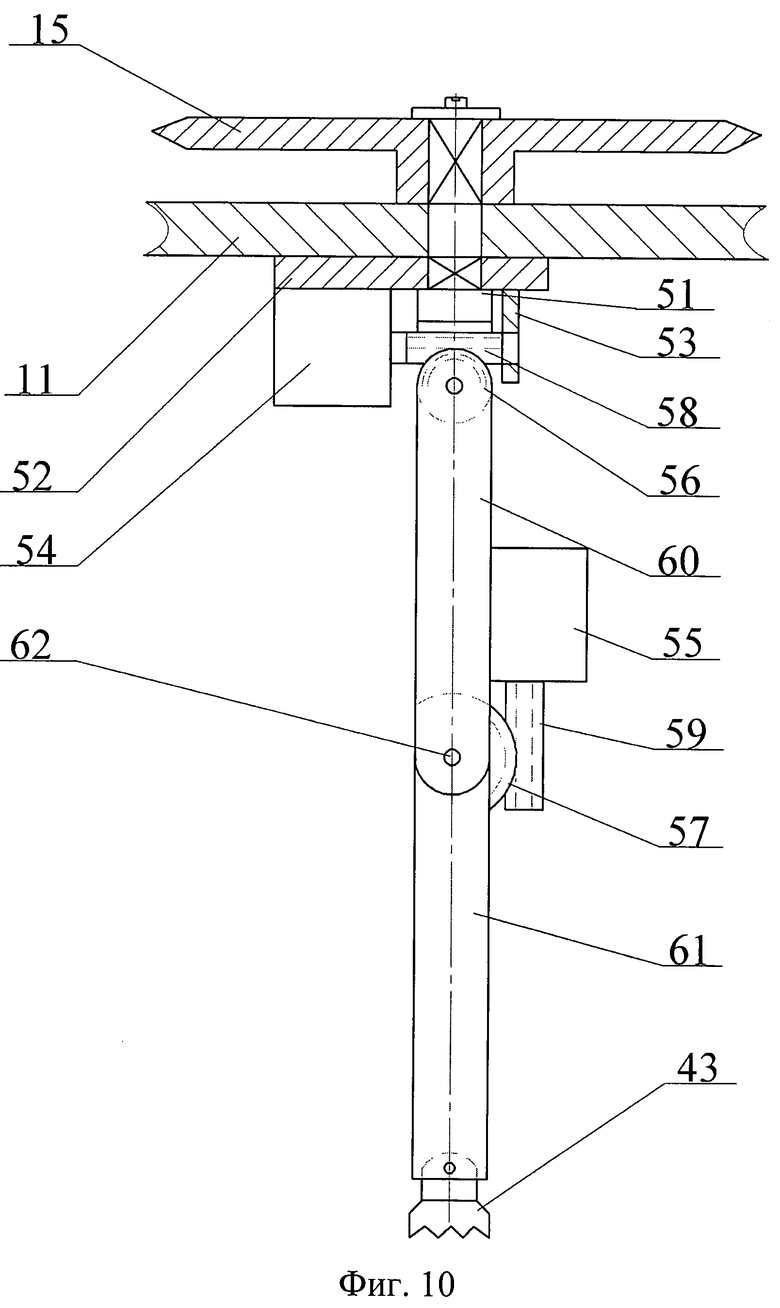
На фиг.10 представлена конструкция четвертого варианта опорного узла, где позиции 15-43 - те же, что и на фиг.4.
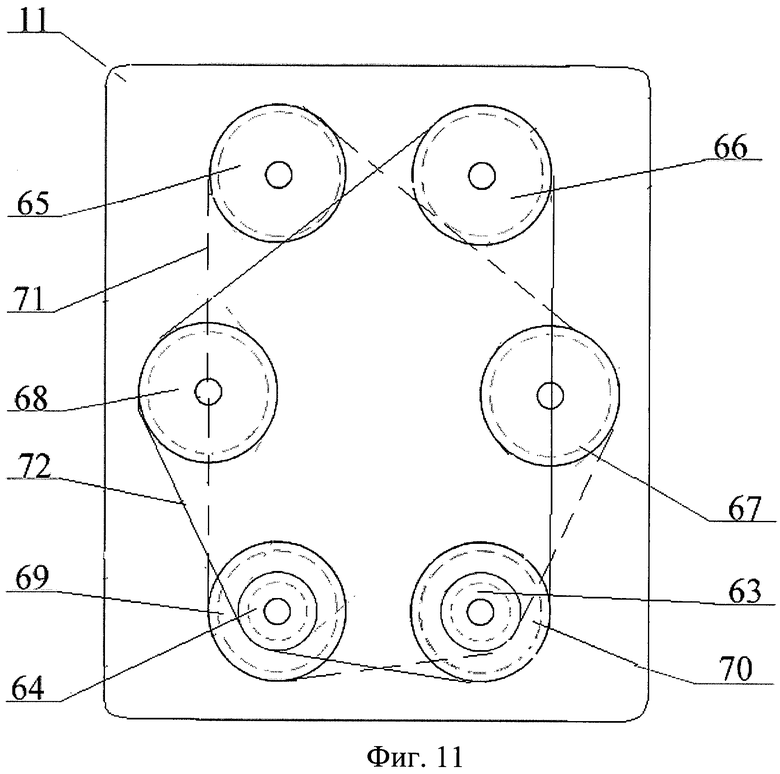
На фиг.11 представлена кинематическая схема цепной связи между звездами, обеспечивающими поступательное движение ШУ, где:
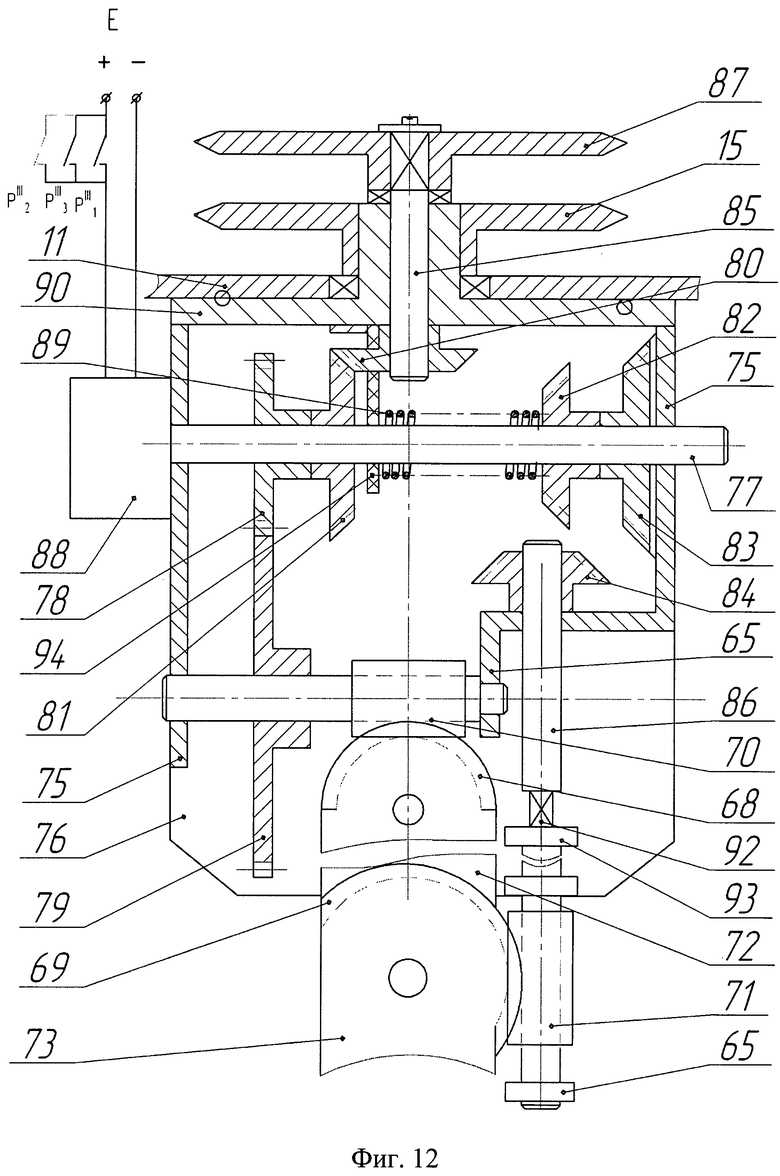
На фиг.12 представлена конструкция пятого варианта опорного узла, где позиции 11-74 те же, что на фиг.10.
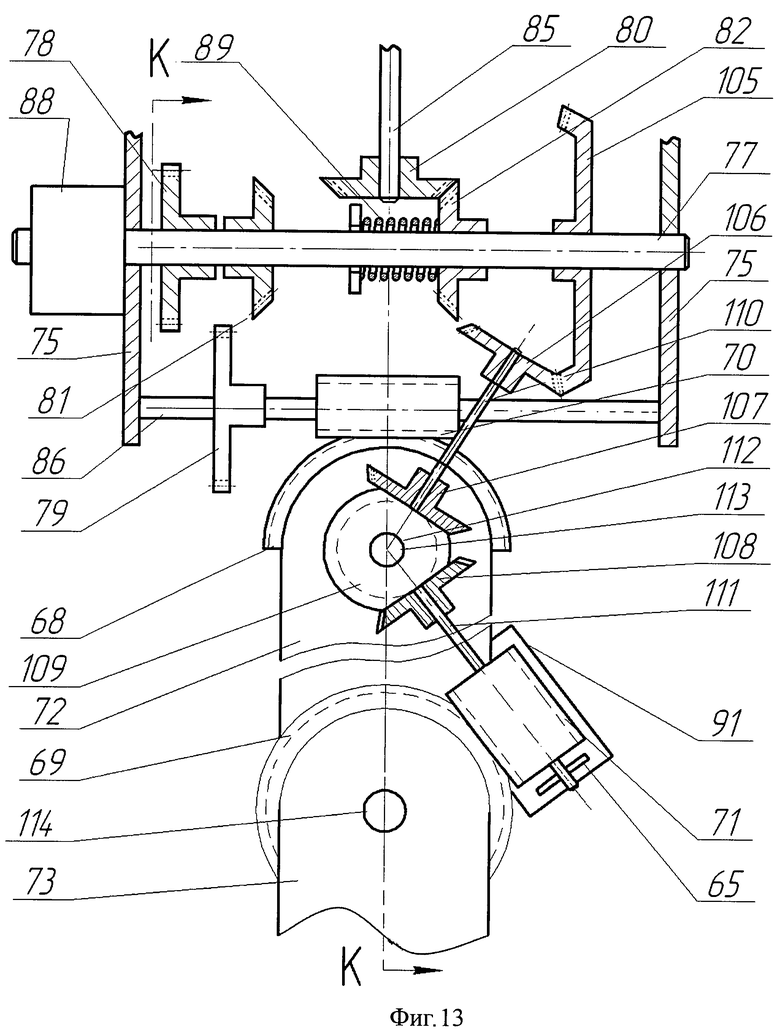
На фиг.13 представлена конструкция привода шестого варианта опорного узла, где позиции 11-94 те же, что на фиг.12.
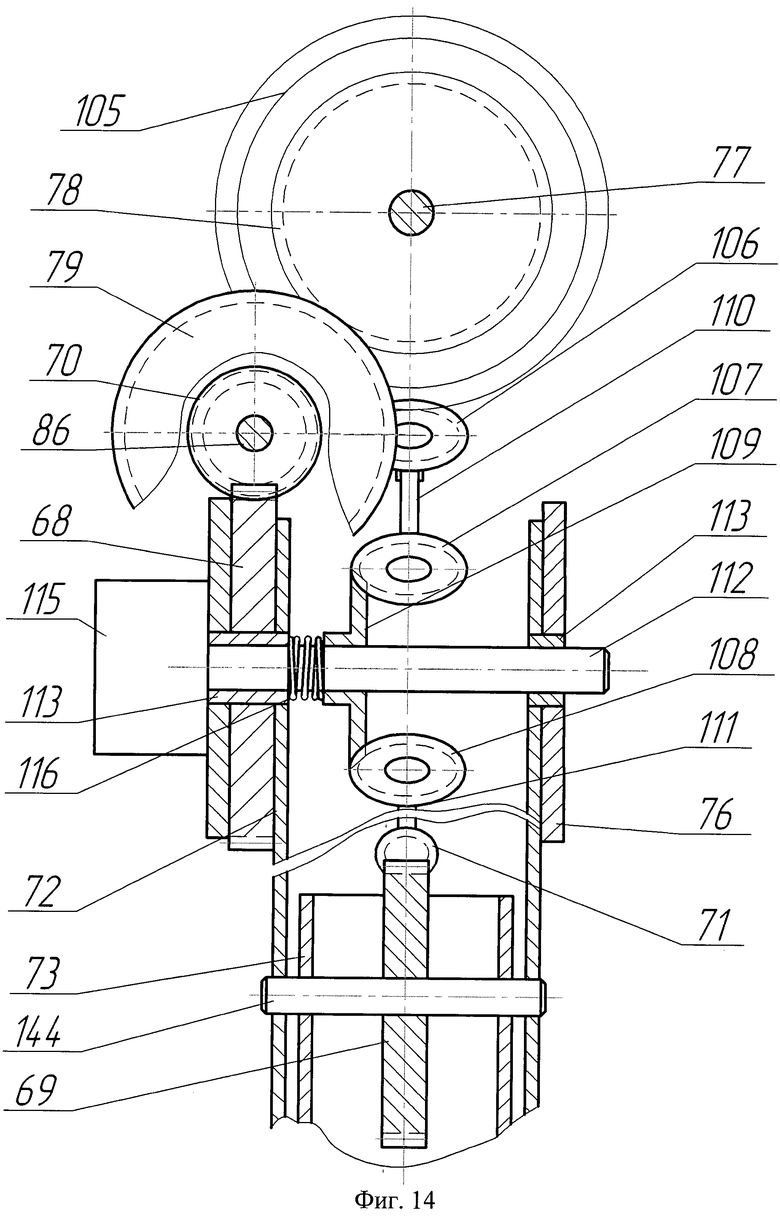
На фиг.14 представлен вид К-К по фиг.13 на конструкцию пятого варианта опорного узла, где позиции 68-114 те же, что на фиг.13.
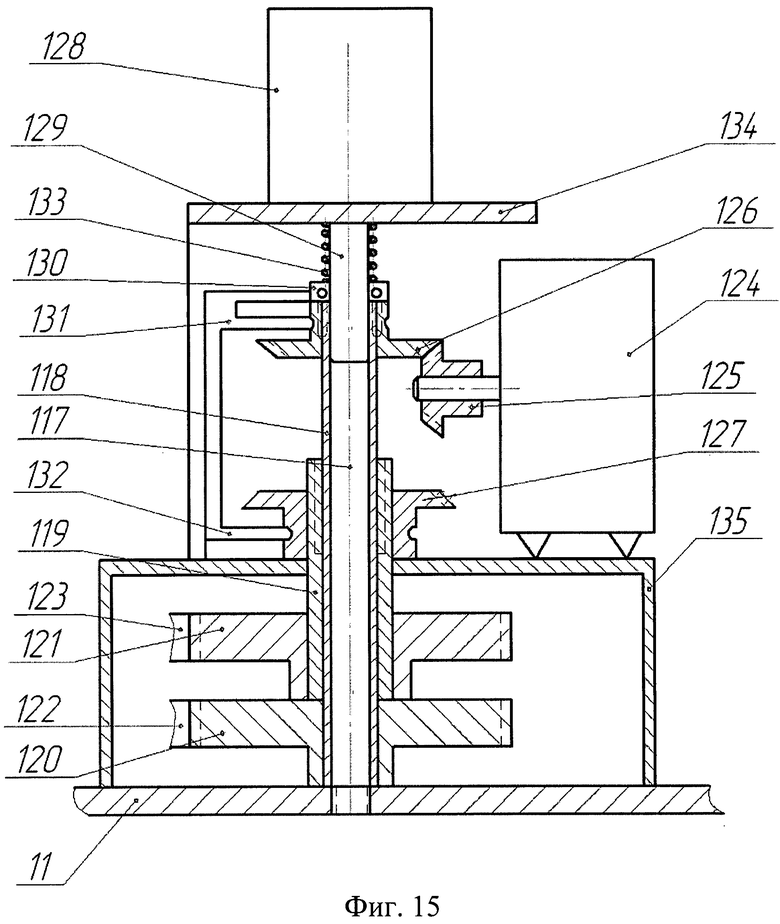
На фиг.15 представлена конструкция узла дистанционного изменения направления движения шагающего устройства.
Принцип работы шагающего устройства (ШУ), конструкция которого представлена на фиг.1-5, заключается в следующем.
Работа шагающего устройства основана на применении конструкции прототипа - шагающего вездехода. Конструкция вездехода дополнена рулевым узлом и креслом, установленным над корпусом 1. Существенные изменения внесены в конструкции приводов гидротелескопических опор. ШУ состоит из корпуса 1, содержащего платформу 11 прямоугольной формы, закрытого крышкой, и шести выдвигающихся гидротелескопических (пневмотелескопических) опор. Опоры установлены под платформой с возможностью изменения их направления движения. Нечетные 5, 7, 9 и четные 6, 8, 10 опоры выдвигаются по очереди, опираясь попеременно на три четные или нечетные опоры, расположенные по вершинам треугольника. Платформа 11 и кресло 2 сохраняет при движении свое устойчивое горизонтальное положение.
Рулевой узел обеспечивает мгновенное изменение направления движения устройства в пределах от 0 до ±180°.
В центре ШУ над платформой установлены кресло 2 и рулевой узел 3 изменения направления движения опор, кинематически связаны с шестью периферийными гидротелескопическими (пневмотелескопическими) опорами 5-10, обеспечивающими поступательное движение устройства.
Платформе 11 первоначально придается горизонтальное положение и она держится на трех выдвижных телескопических (например, на четных) опорах ГТО2. Три другие - нечетные опоры ГТО1 должны находиться в поднятом положении. После одного цикла перемещения вперед нечетные опоры опускаются вниз до прикосновения с земной поверхностью и пока не сработают все три концевые включатели опор. После этого четные опоры ГТО2 поднимаются вверх до упора. При этом срабатывают все три верхние концевые включатели. После этого начинается следующий цикл перемещения платформы вперед. Последовательность смены циклов обеспечивается с помощью электрической схемы блока управления (см. фиг.7).
Изменение направления движения ШУ осуществляется с помощью рулевого узла, конструкция которого приведена на фиг.3. Для изменения направления движения ШУ достаточно повернуть с помощью рукоятки 35 (36) втулку фиксации ориентации опор 26 (27) и повернуть рычаги 33 (34) на нужный угол в соответствии с кинематической цепной связью между центральной звездой 12 (13) и периферийными ведомыми звездами 15-20, приведенной на фиг.2. При повороте центральной звезды на угол φ по часовой стрелке каждая периферийная звезда поворачивается на такой же угол φ так же по часовой стрелке. В этом же направлении будет шагать ШУ в следующем цикле продольного движения. При выключенном переключателе Пк1 (Пк2) ШУ остановится и будет ждать изменения направления движения оставшихся трех выдвижных ГТО. После установки обеих указателей направления движения в одинаковое угловое положение ШУ будет шагать вдоль установленного направления. Когда указатели направлены в разные стороны, ШУ будет двигаться по зигзагу.
Поворот ШУ в ту или другую стороны после первого и пятого циклов осуществляется только при необходимости с участием самого оператора (инвалида). Для этой цели в электрическую схему на фиг.7 введены первый Пк1 и второй Пк2 переключатели. При выключенных переключателях после 1 и 5 циклов ШУ останавливается и будет ждать дальнейших действий инвалида. После этого осуществляется поворот трех других опор, находящихся в поднятом состоянии в ту или другую стороны. Затем включается соответствующий переключатель и ШУ продолжает свое движение в заданном направлении. Для изменения направления движения ШУ необходимо при выключенном переключателе Пк2 с помощью рукояток 35 (36) и отжимных фиксаторов 26 (27) вывести рычаги 33 (34) из фиксированного положения и повернуть ведущие центральные зубчатые колеса (звезда) 12, 13 на необходимый угол в ту или другую стороны.
В центре платформы установлены кресло и рулевой узел для изменения направления движения опор, кинематически связанный с шестью периферийными узлами гидротелескопических (пневмотелескопических) опор (ГТО1 и ГТО2).
Платформа 11 держится на трех выдвижных телескопических (например, на четных) опорах ГТО2. Три другие - нечетные опоры ГТО1 должны находиться в поднятом положении. После одного цикла перемещения вперед нечетные опоры опускаются вниз до прикосновения с земной поверхностью и пока не сработают все три концевые включатели опор. После этого четные опоры ГТО2 поднимаются вверх до упора. При этом срабатывают все три верхние концевые включатели. После этого начинается следующий цикл перемещения платформы вперед. Последовательность смены циклов обеспечивается с помощью электрической схемы блока управления изменением направления движения ШУ, приведенной на фиг.7.
Гидротелескопические устройства через шланги 44 и электрогидроклапаны подключаются к гидронасосу. Для повышения быстродействия могут быть использованы пневмотелескопические устройства, подключенные к пневмонасосу. Последовательное открытие электрогидроклапанов (электропневмоклапанов) осуществляется контактами реле Р1-Р8. Нечетные гидротелескопические опоры управляются нечетными реле - Р1, Р3, Р5, Р7, а четные - четными реле - Р2, Р4, Р6, Р8.
Гидротелескопические (пневмотелескопические) устройства, управляемые нечетными опорами, обозначены одним штрихом - ГТУ1' и ГТУ2', а четными опорами - двумя штрихами - ГТУ1'' и ГТУ2''.
Процесс перемещения шагающего устройства состоит из десяти циклов, строго следующих один за другим. Этот процесс можно запрограммировать с помощью электрической схемы, приведенной на фиг.7. Электрическая схема состоит из восьми самоблокирующихся электрических реле, которые последовательно включаются при замыкании концевых включателей (Квк1 -Квк8). Последовательное переключение обеспечивается путем размыкания нормально замкнутых контактов реле, через которые замыкается цепь питания реле предыдущего цикла.
Последовательность циклов 1-10 следующая.
1. Подъем вторых звеньев II нечетных опор до замыкания трех концевых включателей Квк1, установленных на шарнирном соединении между звеньями I и II. Эта операция осуществляется при включении концевого включателя Квк1 с помощью реле Р1, замыкающего цепь питания вторых гидротелескопических (пневмотелескопических) устройств (ГТУ2).
2. При выключенном Пк1 осуществляется поворот нечетных опор в нужное направление. После чего переключатель Пк1 переводится во включенное положение.
3. После включения всех трех концевых включателей, соединенных друг с другом последовательно (операция «И»), на схеме 7, заменено одним включателем Квк2, срабатывает реле Р2. Аналогичным образом роль Квк1 играют три последовательно включенных концевых включателей, которые срабатываются после второго цикла и при опущенных четных ГТО2 и вытянутом положении штоков ГТУ1.
Контактами Р2' происходит самоблокировка реле Р2. Реле Р2 своими контактами Р2'" включает цепи питания трех четных гидротелескопических опор (ГТУ2). Четные опоры опускаются до тех пор, пока не сработают все три последовательно соединенные концевые включатели (заменены одним включателем Квк3).
4. При замыкании Квк3 срабатывает реле Р3, которое самоблокируется контактами Р3' и размыкает контактами Р3" цепь питания Р2. В результате вторые звенья (II) нечетных опор ГТУ2' поднимутся, что приведет к срабатыванию трех концевых включателей. Все три концевые включатели включены последовательно (образуют элемент «И») и заменены одним включателем Квк4.
5. Включение концевого включателя Квк4 приводит к срабатыванию реле Р4, которое самоблокируется и разрывает цепь питания реле Р3. Реле Р4 включает цепи питания трех ГТУ1'' четных опор.
При этом вторые звенья (II) четных гидротелескопических опор опускаются до соприкосновения с земной поверхностью. При этом сработают три концевые включатели (Квк5). Концевые включатели должны сработать после обеспечения надежного контакта подпятников 43 с земной поверхностью. Для этой цели может быть использована пружина, которая должна сжиматься до определенного давления, прежде чем замкнутся контакты включателя. Подбирая жесткость пружины, возможно обеспечить необходимое усилие на каждой из трех опор.
6. После включения всех трех последовательно включенных концевых включателей (заменен элементом «И» - Квк5) срабатывает реле Р5.
Реле Р5 самоблокируется и размыкает цепь питания Р5. Контактами Р5"' замыкается цепь питания трех нечетных ГТУ2'. После чего опускаются все три вторые звенья (II) нечетных гидротелескопических упор до прикосновения с земной поверхностью. После обеспечения надежного контакта с землей срабатывают все три концевые выключатели, которые заменены одним включателем Квк6. При этом включается реле Р6.
7. Реле Р6 самоблокируется контактами Р6 и включает своими контактами Р6" цепи питания трех ГТУ2" четных опор. При этом вторые звенья (II) четных опор поднимаются вверх.
Подъем звеньев II прекращается после того, как сработают все три концевые выключателя, установленные на шарнирном соединении звеньев I и II, которое заменено включателем Квк7.
8. При выключенном Пк2 осуществляется поворот четных опор в нужное направление. После этого переключатель Пк2 переводится во включенное положение.
9. При включенном положении концевого включателя Квк7 и переключателя Пк2 срабатывает реле Р7, которое самоблокируется контактами P7 I и включает контактами Р7 II цепи питания трех ГТУI I нечетных опор. При этом первые звенья I нечетных опор ГТУI 2 5, 7, 9 поворачиваются до упора. После этого срабатывают все три концевых включателя, установленные в шарнирных соединениях опор замененные одним включателем Квк8.
10. Это приводит к срабатыванию восьмого реле P8, которое самоблокируется контактами P8 I. Контакты P8 II включает цепи питания трех ГТУ2 II четных опор. При этом срабатывают все три концевых включателя, замененные Квк1. Это приводит к срабатыванию первого реле P1 и повторению всех последующих десяти циклов.
Изменение направления движения ШУ может быть осуществлено после первого или шестого циклов. Для этой цели на фиг.7 используется переключатели Пк1 и Пк2, которые прерывают движение после первого и шестого циклов. Инвалид производит поворот опор в ту или другую стороны. Для изменения направления движения ШУ используется рулевой узел изменения направления движения, конструкция которого представлена на фиг.3.
Рулевой узел 3 состоит из вертикальной стойки руля 14, неподвижно закрепленной на платформе 11. На стойке руля соосно установлены первый 31 и второй 32 трубчатые валы с возможностью свободного поворота. В корневой (нижней) части первого и второго трубчатых валов неподвижно установлены первая 12 и вторая 13 центральные звезды ориентации соответственно. Верхние наконечники указанных валов с помощью установочных втулок 29, 30 неподвижно соединены с первым 33 и вторым 34 рычагами управления соответственно.
На верхнем наконечнике стойки руля 14 неподвижно закреплен шлицевой диск 25. По окружности шлицевого диска нарезаны эквидистантно шлицы прямоугольного профиля, которые входят в сцепление с торцевыми наконечниками первой 26 и второй 27 втулок фиксации ориентации опор. Данные втулки установлены на соответствующих рычагах управления 33 и 34 с возможностью поступательного перемещения. Это обеспечивается с помощью спирального паза в корневой части втулок фиксации ориентации опор 26 и 27. Через спиральные пазы втулок ориентации проходят согнутые под прямым углом корневые наконечники соответствующих рычагов управления 33 и 34. На периферийных наконечниках втулок фиксации ориентации опор 26 и 27 неподвижно установлены соответствующие рукоятки фиксатора поворота опор 35 и 36. При повороте левой рукоятки 35 по часовой стрелке, правой 36 - против наконечники втулок фиксации ориентации опор 26 или 27 выходят из сцепления со шлицами диска 25. Для этого спиральный паз первой втулки 26 должен иметь левый наклон, а второй втулки 27 - правый наклон.
После вывода одной из втулок из фиксированного положения путем поворота соответствующего рычага 33 (или 34) и связанного с ним первого 31 (или второго 32) трубчатого вала поворачивается первое 12 зубчатое колесо (или второе зубчатое колесо 13) (звезда) в ту или другую стороны. Центральное ведущее первое зубчатое колесо (звезда) ориентации 12 с помощью первого зубчатого ремня (цепи) 21 связано и взаимодействует с нечетными периферийными зубчатыми колесами (звездами) ориентации 15, 17, 19. Второе центральное зубчатое колесо (звезда) 13 с помощью второго зубчатого ремня (цепи) 13 кинематически связано и взаимодействует с четными периферийными зубчатыми колесами (звездами) ориентации 16, 18, 20.
Кронштейн 28 имеет П-образный профиль и свободно установлен на стойке руля 24. Кронштейн обеспечивает необходимую высоту установки второго трубчатого вала 32 и второго ведущего центрального зубчатого колеса (звезды) ориентации нечетных опор 13.
Первый Ун1 и второй Ун2 указатели направления движения опор неподвижно связаны с нижней 30 и верхней 29 установочными втулками соответственно. Указатели имеют вид стрелки и связаны со втулками в радиальном направлении (см. фиг.1). При закрытой крышке указатели показывают направление движения четных и нечетных опор. Когда указатели совпадают по направлению, ШУ двигается поступательно в указанном направлении. Когда указатели направлены в разные стороны, ШУ двигается по зигзагу. Необходимость в движении по зигзагу возникает, в частности, когда ширина ступеней лестницы меньше, чем длина поступательного движения гидротелескопических опор.
Первый вариант опорного узла (см. фиг.4) функционирует следующим образом.
На оси поворота опоры 37 неподвижно установлено зубчатое колесо (звезда) 15, связанное с зубчатым ремнем (цепью) 21, и взаимодействует с рулевым узлом 3.
На оси поворота опоры 37 неподвижно установлен первый рычаг 38. Наконечник данного рычага плоским шарниром связан с первым гидротелескопическим (пневматическим) устройством 41. Второе гидротелескопическое (пневматическое) устройство 42 также плоским шарниром связано с нижним наконечником оси поворота 37.
Первый вариант опорного узла, конструкция которого представлена на фиг.4, содержит первый рычаг 38, который неподвижно закреплен на оси поворота опоры 37. Нижний конец оси поворота шарнирно связан с торцом цилиндра второго гидротелескопического (пневмотелескопического) устройства 42. Корпус второго гидротелескопического устройства неподвижно связан с вторым рычагом 39. Концы первого 38 и второго 39 рычагов через плоские шарниры соединены и взаимодействуют с первым гидротелескопическим (пневмотелескопическим) устройством (ГТУ1) 41. Перемещение штока первого ГТУ приводит к повороту опоры относительно плоского шарнира 4, связывающего его с осью опоры 37.
Соединение второго рычага 39 с корпусом (цилиндром) второго ГТУ2 42 может быть осуществлено с помощью хомута 40. Шток второго ГТУ2 42 выполняет роль выдвижной опоры. Конец штока пространственным шарниром связан с подпятником 43. ГТУ2 должен быть многоступенчатым, чтобы обеспечить необходимую длину выдвижения опоры. ГТУ1 41 и ГТУ2 42 с помощью шланга 44 подключается к гидросистеме (пневмосистеме) и блоку управления. Блок управления (электрическая схема на фиг.7) задает строгую последовательность циклов работы гидротелескопических (пневмателескопических) устройств 41 и 42.
Во втором варианте конструкции опорного узла (см. фиг.5) удлиняющая опора выполнена в виде складывающихся ромбов.
Опора состоит из связанных плоскими шарнирами 47 звеньев 46, образующих ячейки формы ромба. Ячейки опор имеют одинаковые длину и кинематические связаны друг с другом. Изменение формы верхней ячейки (ромба) приводит к аналогическому изменению формы всех последовательно связанных ячеек. Два противоположных узла по вертикали верхней ячейки опоры шарнирно связаны со вторым гидротелескопическим (пневмотелескопическим) устройством. Наконечник штока второго гидротелескопического (пневмотелескопического) устройства 42 плоским шарниром связан с нижним узлом верхней ячейки опоры. При выдвижении штока ромб сужается по горизонтали и удлиняется по вертикали на длину L. На такую же длину одновременно удлиняются все ячейки опоры. С нижним узлом последней N-ой ячейки опоры шарнирно связан подпятник 43. Двухстепенный шарнир обеспечивает устойчивое положение подпятника на рельефной поверхности земли. Суммарное удлинение опоры из N ячеек в растянутом положении будет составлять N×L. Однако, согласно закону сохранения энергии, во столько же раз уменьшится усилие, передаваемое на подпятник 43.
Длина растяжения опор может быть разная. Она зависит от рельефа, местности. Для этого на подпятник каждой опоры устанавливается подпружиненный концевой электрический переключатель, связанный с блоком управления.
После полной фиксации растянутого положения четных трех опор начинается подъем нечетных опор и наоборот. После полного подъема опор начинается их поворот вокруг горизонтальной оси плоского шарнира 4, установленного в корневой части удлиняющей опоры.
В приводе поступательного движения ШУ используется первое гидротелескопическое (пневмотелескопическое) устройство ГТУ1 41. Цилиндр данного гидротелескопического устройства шарнирно связан с первым рычагом 38. Рычаг, в свою очередь, неподвижно закреплен на оси поворота 37 опоры. Шток первого гидротелескопического (пневмотелескопического) устройства 41 также шарнирно связан с вторым рычагом 39, неподвижно соединенным с помощью хомута 40 с корпусом цилиндра второго гидротелескопического устройства 52 ГТУ2 42.
Длину рычагом 38 и 39 можно менять в зависимости от требуемого шагового расстояния и угла колебания опоры (φ), связанных соотношением: S=L×tgφ.
Данный привод опоры подобен ноге человека, двигающегося не пригибая колени.
В третьем варианте конструкции опорного узла (см. фиг.6) опора выполнена из двух шарнирного связанных звеньев 48 и 49. Такая конструкция опоры наиболее близка по принципу действия к ноге человека. Плоское шарнирное соединение 50 между звеньями обеспечивает изгиб и подъем подпятника 43. Верхнее звено 48 опоры с помощью хомута 40 через рычаг 39 шарнирно связано со штоком первого ГТУ1 41, а нижнее звено 49 через третий рычаг 50 также шарнирно со штоком второго ГТУ2 42.
Первое ГТУ1 41 управляет верхним звеном 48 по углу φ относительно оси шарнира 4, второе ГТУ2 42 управляет нижним звеном 49, меняя его угловое положение относительно верхнего звена. Шарнирное соединение 50 между звеньями 48 и 49 играет роль колени человека.
Подбирая оптимальное положение крепления ГТУ1 и ГТУ2, длину первого, второго и третьего рычагов и верхнего 48 и нижнего 49 звеньев, возможно обеспечить необходимую скорость, маневренность и проходимость шагающего устройства.
Принцип действия четвертого варианта опорного узла (см. фиг.10) отличается от третьего варианта тем, что гидроскопические устройства ГТУ1 и ГТУ2 в приводах опор заменены реверсивными электродвигателями постоянного напряжения с червячными редукторами.
Ось поворота опоры выполнена в виде вилки 51. Вилка неподвижно связана с ведомой периферийной звездой 15 и поворотной платформой 52. На поворотной платформе неподвижно установлены первый электродвигатель 54 и кронштейн 53. Вилка плоским шарниром 62 связана с коревой частью первого звена 60 опоры. Соосно шарниру 62 в корневой части первого 60 и второго 61 звеньев неподвижно установлены сегментные червячные колеса 56 и 57. Они входят в сцепление с соответствующими червяками 58 и 59, установленными на валах электродвигателей с редукторами 54 и 55 соответственно.
Червячная передача в приводах опор предотвращает пригибание опор в шарнирных соединениях 62.
Крепление второго электродвигателя 55 к первому звену может быть осуществлено так, чтобы червяк 59 был ориентирован горизонтально и взаимодействовал с сегментной шестерней 57 аналогично червячной паре 56-58.
Реверсивный электродвигатель с редуктором 54 и червячной парой 58-56 выполняют операции по 5, 6 циклам передвижения ШУ. Реверсивный электродвигатель с редуктором 55 и червячной парой 59-57 выполняет операции по 1, 3 циклам передвижения ШУ.
Второй электродвигатель с редуктором 55 рассчитан только на подъем и опускание второго звена опоры и может иметь небольшую мощность.
В остальном принцип работы четвертого варианта опорного узла на фиг.10 совпадает с третьим вариантом.
Принцип действия четвертого варианта опорного узла, представленного на фиг.10, заключается в следующем.
В отличие от четвертого варианта, представленного на фиг.10, в пятом варианте все циклы передвижения опоры осуществляются с помощью двух реверсивных электродвигателей с редукторами 92. Электродвигатели устанавливаются над платформой 11 корпуса с помощью П-образных кронштейнов. Электродвигатели должны обеспечить реверс звезд и питаться от аккумулятора. Редуктор обеспечивает необходимый момент вращения на первом вертикальном валу 85.
Первый электродвигатель с редуктором, на валу которого установлена первая ведущая звезда 95, устанавливается с помощью П-образной кронштейна соосно над второй периферийной шестерней. Таким же образом второй электродвигатель с вторым ведущим зубчатым колесом (звездой) 64 на валу, устанавливается соосно пятому периферийному зубчатому колесу (звезде) 69 поступательного движения шагающего устройства (см. фиг.11). Кинематическая схема ременной передачи (цепной связи) между первым ведущим зубчатым колесом (звездой) 63 и нечетными периферийными зубчатыми колесами (звездами) 65, 67, 69 осуществляется с помощью третьего зубчатого ремня (цепи) 71. А кинематическая схема ременной передачи (цепной связи) между 66, 68, 70 периферийными зубчатыми колесами (звездами) и вторым ведущим зубчатым колесом (звездой) 64 осуществляется с помощью четвертого зубчатого ремня (цепи) 104.
Вращение ведущей зубчатого колеса (звезды) передается на ведомое периферийное зубчатое колесо (звезду) 87, установленное неподвижно на первом валу 85. Вал свободно проходит через отверстия в центре поворотной платформы 90. Торец поворотной платформы имеет прямоугольную форму и по периметру неподвижно связан с двумя боковыми плоскопараллельными пластинами 75, 76 и двумя параллельными кронштейнами 73, 74.
Соосно оси поворота поворотной платформы 90 на ней неподвижно установлено периферийное зубчатое колесо (звезда) ориентации 15. Колесо установлена над радиально упорным подшипником, обеспечивающим свободный поворот ее относительно платформы 11. Первое (верхнее) 72 и второе (нижнее) 73 звенья опоры шарнирно связаны друг с другом и боковыми платанами 75, 76 опорного узла. Верхние наконечники звеньев опоры 72 и 73 неподвижно связаны с соответствующими сегментами червячными колесами 68 и 69, аналогично третьему варианту опорного узла. Сегментные червячные колеса находятся в постоянном сцеплении с соответствующими червяками 70 и 71. Первый (верхний) червяк 70 шарнирно установлен между параллельными кронштейнами 73, 74. Нижний червяк с помощью кронштейнов 65 шарнирно установлен на пластине 91, неподвижно связанной с первым (верхним) звеном 72. Взаимодействие первой 70-68 и второй 71-69 червячных пар обеспечивают поворот звеньев 72 и 73 относительно друг друга и пластин 75, 76 в шарнирных соединениях.
Так как все 10 циклы изменения положения верхнего 72 и нижнего 73 звеньев опор повторяются в строгой последовательности, то в качестве привода для их осуществления используется два электродвигателя. При осуществлении 1-го и 3-го циклов с помощью контактов P1 III и Р3 III включается электромагнит 88. Электромагнит втягивает в себя сердечник и смещает связанный с ним неподвижно вал 77 в продольном направлении. Одновременно с валом перемещаются установленные на нем неподвижно вторая 81 и третья 82, четвертая 83 конические и первая цилиндрическая 78 шестерни.
При этом первая коническая шестерня 80 входит в сцепление с третьей 82 шестерней, а четвертая шестерня 83 с пятой 84 конической шестерней. Кроме того, находящиеся ранее в сцеплении вторая коническая шестерня 81 и первая цилиндрическая шестерня выходят из сцепления с шестернями 80 и 79. Это приводит к разрыву кинематической цепи привода первого (верхнего) звена 72 опоры. При этом замыкается кинематическая цепь привода нижнего звена 73 опоры. Вращение вертикального вала 85 через две пары конических шестерен 80-81 и 83-84 передается на второй гибкий вал 86 с удлинителем. Удлинитель состоит из штока 92 прямоугольного сечения. Шток свободно ходит по отверстию 93 во втулке такого же прямоугольного сечения. Это позволяет гибкому валу менять свою длину при пригибании верхнего звена опоры. Гибкий вал приводит во вращении второй червяк 71.
Блок управления через контакты реле P1 (или Р3) включает электродвигатель, который вращает второй червяк 71 в том или другом направлении.
Взаимодействие второго червяка с червячным колесом 69 обеспечивает подъем второго звена 73 в первом цикле и его опускание в третьем цикле.
После срабатывания четвертого реле третье реле и включенный через его контакты электромагнит 88 обесточиваются. Сжатая до этого пружина 89 отжимает третью коническую шестерню 82 и связанный с ней вал 77 в крайне правое положение. Левый конец пружины опирается в упор 94, неподвижно связанный с поворотной платформой 90.
Теперь в сцепление с первой конической шестерней 80 входит вторая коническая шестерня 81, а также первая цилиндрическая 78 - со второй 79 цилиндрической шестерней, тем самым замыкается кинематическая цепь привода верхнего звена опоры 72.
При этом вращение первого вертикального вала 85 через коническую пару шестерен 80-81 и цилиндрическую пару 78-79 шестерен передается на первый червяк 70. Червяк находится в сцеплении с первым сегментным червячными колесом 68. При включении реле P2 (или P4) электродвигатель вращает первый червяк в ту или другую стороны. Это приводит к повороту первого звена вокруг шарнирного соединения 62, против часовой стрелки или по часовой стрелке. Поворот по часовой стрелке приводит к наступательному движению платформы вперед, т.е. направо, так как циклы движения звеньев четных и нечетных опор меняется через один. При включении реле P1, Р3 срабатывается электромагниты 88 нечетных опор, а при включении Р5 и P7 - электромагниты четных опор.
Таким образом, полный цикл поступательного движения ШУ складывается из чередующихся восьми циклов движения звеньев нечетных и четных опор. При этом 1-3; 5-7 циклы, связанные с подъемом, переносом вперед и опусканием нижних звеньев опор, требуют небольших затрат энергии. А циклы 4 и 8, которые обеспечивают поступательное движение платформы вперед, требуют максимальных затрат энергии. Так как все три четные и нечетные опоры ШУ двигаются синхронно, циклы поступательного движения четных или нечетных опор совпадают. Аккумулятор должен быть рассчитан на такую устроенную пиковую потребляемую мощность электродвигателей. Такие аккумуляторы уже разработаны и широко применяются в электромобилях.
Два электродвигателя, используемые автономно для четных и нечетных опор, могут быть заменены одним более мощным электродвигателем с редуктором.
На верхних наконечниках первых валов 85 установлены неподвижно вторые периферийные зубчатые колеса (звезды), связанные зубчатым ремнем (цепью) с центральным ведущим зубчатым колесом (звездой), установленным на валу реверсивного электродвигателя с редуктором. При использовании двух электродвигателей один из них используется в приводе четных, второй - в приводе нечетных опор.
Схема ременной зубчатой передачи (цепной связи) между периферийными зубчатыми колесами (звездами) четных 66, 68, 70 и нечетных 65, 67, 69 опор и двумя центральными ведущими зубчатыми колесами (звездами) 63, 64 поступательного движения ШУ представлена на фиг.11.
Первое 63 и второе 64 ведущие зубчатые колеса (звезды) устанавливаются на валах соответствующих электродвигателей постоянного тока с редукторами. С помощью третьей 71 зубчатой рейки первое зубчатое колесо (звезда) связано и взаимодействует с 63 нечетными ведомыми периферийными зубчатыми колесами 65, 67, 69. Второе ведущее зубчатое колесо 64, в свою очередь, с помощью второго зубчатого ремня 72 связано и взаимодействует с четными ведомыми зубчатыми колесами (звездами) 66, 68, 70.
Выключение и реверс электродвигателей 63, 64 осуществляется с помощью блока управления (фиг.7). Ведомые периферийные зубчатые колеса (звезды) 65-70 неподвижно устанавливаются на осях вращения соответствующих опор 5-10.
Червячная передача в приводах опор предотвращает пригибание опор в шарнирных соединениях 62.
Крепление второго электродвигателя 55 к первому звену 60 может быть осуществлено так, чтобы червяк 59 был ориентирован горизонтально и взаимодействовал с сегментной шестерней 57 аналогично червячной паре 58-56.
Реверсивный электродвигатель с редуктором 54 и червячной парой 58-56 выполняет операции по 3-7 циклам передвижения ШУ. Реверсивный электродвигатель с редуктором 55 и червячной парой 57-59 выполняет операции по 1-5 циклам передвижения ШУ.
Второй электродвигатель с редуктором 55 рассчитан только на подъем и опускание второго звена опоры и может иметь небольшую мощность.
В остальном принцип работы опорного узла на фиг.11 совпадает с третьим вариантом (см. фиг.6).
Принцип действия четвертого варианта опорного узла, представленного на фиг.10, заключается в следующем.
В отличие от четвертого варианта, представленного на фиг.6, в пятом варианте все циклы передвижения опоры осуществляется с помощью двух реверсивных электродвигателей с редукторами 92. Электродвигатели устанавливаются над платформой 11 корпуса с помощью П-образных кронштейнов. Электродвигатели должны обеспечить реверс звезд и питаться от аккумулятора. Редуктор обеспечивает необходимый момент вращения на первом валу 85 (см. фиг.12).
Первый электродвигатель с редуктором, на валу которого установлена первая ведущая звезда 63, устанавливается с помощью П-образной кронштейна соосно над шестой периферийной шестерней 70. Таким же образом второй электродвигатель с ведущей звездой 64 на валу устанавливается соосно пятой периферийной звезде 69 поступательного движения шагающего устройства (см. фиг.11). Кинематическая схема ременной (цепной) связи между первым ведущем зубчатым ремнем (звездой) 63 и нечетными периферийными зубчатыми колесами (звездами) 65, 67, 69 осуществляется с помощью третьего ремня (цепи) 71. А кинематическая схема цепной связи между 66, 68, 70 периферийными зубчатыми колесами (звездами) и вторым ведущим зубчатым колесом (звездой) 64 осуществляется с помощью четвертого ремня (цепи) 72.
Вращение ведущего зубчатого колеса (звезды) передается на ведомое периферийное зубчатое колесо (звезду) 87, установленное неподвижно на первом валу 85. Вал свободно проходит через отверстия в центре поворотной платформы 90. Торец поворотной платформы имеет прямоугольную форму и по периметру неподвижно связан с двумя боковыми плоскопараллельными пластинами 75 и двумя параллельными кронштейнами 76.
Соосно оси поворота поворотной платформы 90 на ней неподвижно установлено периферийное зубчатое колесо (звезда) ориентации 15, колесо (звезда) установлено над радиально упорным подшипником, обеспечивающим свободный поворот ее относительно платформы 11. Первое (верхнее) 72 и второе (нижнее) 73 звенья опоры шарнирно связаны друг с другом и боковыми платинами 75-76 опорного узла. Верхние наконечники звеньев опоры 72 и 73 неподвижно связаны с соответствующими сегментами червячными колесами 68 и 69, аналогично четвертому варианту опорного узла. Сегментные червячные колеса находятся в постоянном сцеплении с соответствующими червяками 70 и 71. Первый (верхний) червяк 70 шарнирно установлен между параллельными кронштейнами 75. Нижний червяк с помощью кронштейнов 65 шарнирно установлен на пластине 91, неподвижно связанной с первым звеном 72. Взаимодействие первой 70-68 и второй 71-69 червячных пар обеспечивают поворот звеньев 72 и 73 относительно друг друга и пластин 75, 76 в шарнирных соединениях 62.
Так как все восемь циклов изменения положения верхнего 72 и нижнего 73 звеньев опор повторяются в строгой последовательности, то в качестве привода для их осуществления используется два электродвигателя 2. При осуществлении 1-го и 3-го циклов с помощью контактов P1 III и Р3 III включается электромагнит 88. Электромагнит втягивает в себя сердечник и смещает, связанный с ним неподвижно вал 77 в продольном направлении. Одновременно с валом перемещаются установленные на нем неподвижно вторая 81 и третья 82, четвертая 83 конические и первая цилиндрическая 78 шестерни.
При этом первая коническая шестерня 80 входит в сцепление с третьей шестерней 82, а четвертая шестерня 83 с пятой 84 конической шестерней. Кроме того, находящиеся ранее в сцеплении вторая коническая 81 и первая цилиндрическая шестерни выходят из сцепления с шестернями 80 и 79. Это приводит к разрыву кинематической цепи привода первого (верхнего) звена 72 опоры. При этом замыкается кинематическая цепь привода нижнего звена 73. Вращение вала 85 через две пары конических шестерен 80-81 и 83-84 передается на второй гибкий вал 86 с удлинителем. Удлинитель состоит из штока 92 прямоугольного сечения. Шток свободно ходит по отверстию во втулке такого же прямоугольного сечения электромагнитной муфты 93. Это позволяет гибкому валу менять длину при пригибании верхнего звена опоры. Гибкий вал приводит во вращении второй червяк 71. Блок управления через контакты реле P1 (или Р3) включает электродвигатель, который вращает второй червяк 71 в том или другом направлении.
Взаимодействие второго червяка с червячным колесом 69 обеспечивает подъем второго звена 73 в первом цикле и его опускание в третьем цикле.
Электромагнитная муфта 93 отключается при замыкании концевого включателя подпятника 43. Это обеспечивает автономное удлинение длины каждой опоры в зависимости от рельефа местности, что сохраняет горизонтальное положение платформы 11 ШУ.
После срабатывания четвертого реле третье реле и включенный через его контакты электромагнит 88 обесточиваются. Сжатая до этого пружина 89 отжимает третью коническую шестерню и связанный с ней вал 77 в крайне правое положение. Левый конец пружины опирается в упор 94, неподвижно связанный с платформой 11. Теперь в сцепление входят вторая коническая 81 с первой конической 80 шестерней, а также первая цилиндрическая 78 со второй 79 цилиндрической шестерней. Тем самым замыкается кинематическая цепь привода верхнего звена 72. При этом вращение первого вала 85 через коническую пару шестерен 80-81 и цилиндрическую пару 78-79 шестерен передается на первый червяк 70. Червяк находится в сцеплении с сегментным червячным колесом 68. При включении реле Р2 (или Р4) электродвигатель вращает первый червяк в ту или другую стороны. Это приводит к повороту первого звена вокруг шарнирного соединения против часовой стрелки или по часовой стрелке. Поворот по часовой стрелке приводит к поступательному движению платформы вперед, т.е. направо, так как циклы движения звеньев четных и нечетных опор меняется через два. При включении реле P1, Р3 срабатывают электромагниты 88 нечетных опор, а при включении Р5 и P7 - электромагниты четных опор.
Таким образом, полный цикл поступательного движения ШУ складывается из чередующих восьми циклов движения звеньев нечетных и четных опор. При этом 1-3, 5-7 циклы, связанные с подъемом, переносом вперед опусканием нижних звеньев опор, требуют небольших затрат энергии. А циклы 4 и 8, которые обеспечивают поступательное движение платформы вперед, требуют максимальных затрат энергии. Так как три четные и три нечетные опоры ШУ двигаются синхронно, циклы наступательного движения четных или нечетных опор совпадают. Аккумулятор должен быть рассчитан на такую утроенную пиковую потребляемую мощность электродвигателей. Такие аккумуляторы уже разработаны и широко применяются в электромобилях.
Два электродвигателя, используемые автономно для четных и нечетных опор, могут быть заменены одним более мощным реверсивным электродвигателем с редуктором. На верхних наконечниках первых валов 85 опор установлены неподвижно вторые периферийные звезды, связанные одним ремнем (цепью) с центральным ведущим зубчатым колесом (звездой), установленным на валу электродвигателя. При этом должен быть введен еще один электромагнит для переключения четных и нечетных опор. При использовании двух электродвигателей один из них используется в приводе четных, второй - в приводе нечетных опор.
Схема ременной (цепной) связи между периферийными зубчатыми колесами (звездами) четных 98, 100, 102 и нечетных 97, 99, 101 опор и двумя центральными ведущими колесами (звездами) 95, 96 поступательного движения ШУ, представлена на фиг.11.
В этом случае частота переключения электромагнита 88 уменьшается два раза. Включенный контактами P1 III электромагнит в первом цикле отключается после третьего цикла при включении реле Ру. Для этого достаточно параллельно нормально разомкнутым контактам P1 III и Р3 IV подключить нормально разомкнутые контакты Р2 III. В остальном принцип действия пятого варианта опорного узла и блока управления совпадают с третьим вариантом.
В этом случае частота переключения электромагнита 88 уменьшается два раза. Включенный контактами P1 III электромагнит в первом цикле отключается после третьего цикла при включении реле Р4. Для этого параллельно нормально разомкнутым контактам P1 III и Р3 III подключить нормально разомкнутые контакты Р2 III. В остальном принцип действия пятого варианта опорного узла и блока управления совпадают с четвертым вариантом.
Конструкция шестого варианта опорного узла, представленная на фиг.13 и фиг.14, отличается от конструкции пятого варианта (см фиг.12) приводами колебательного движения звеньев опоры 72 и 73.
С помощью конических пар 105-106 и 107-109 и второго вала 110 вращение от горизонтального вала 77 передается на восьмую коническую шестерню 109, ось, вращение которой перпендикулярно валу 77. Ось вращения шестерни 109 соосна оси колебания первого (верхнего) звена 72 опоры. Восьмая шестерня неподвижно установлена на оси вращения 112, которая служит в качестве сердечника второго электромагнита 115 и имеет возможность свободного продольного перемещения.
При отключенном электромагните 115 под воздействием пружины 116 восьмая коническая шестерня входит одновременно в сцепление с шестой 107 и седьмой 108 коническими шестернями. Оси вращения указанных шестерен проходят в плоскости, перпендикулярной осям колебаний 113 и 114 звеньев опор. На третьем валу 111 неподвижно установлен второй червяк 71, входящий в сцепление и взаимодействующий с соответствующим червячным колесом 69.
Второй червяк 71 с помощью кронштейна 65 установлен на плате 91, неподвижно связанной с первым (верхним) 72 звеном опоры. Второе червячное колесо 69, шарнирно установленное на оси вращения 114, неподвижно связано с корневой частью второго (нижнего) 73 звена опоры. При включенном первом 88 и выключенном втором 115 электромагнитах замыкается кинематическая цепь привода второго (нижнего) звенья опоры 73. При включении второго электромагнита восьмая коническая шестерня 109 выходит из сцепления с шестернями 107 и 108 и размыкает цепь привода нижней опоры.
Червячная передача 71-69 обеспечивает неподвижное положение нижнего звена опоры.
После этого начинается 3, 7 (4, 8) цикл движения верхнего звена 72 опоры. При обесточенном первом электромагните 88 под воздействием пружины 89 вал 77 с установленными на нем неподвижно шестернями 81, 82, 105 и 78 смещается направо (см. фиг.13). При этом в сцепление с ведущей конической шестерней 80 входит вторая коническая шестерня 81, а с ведущей цилиндрической шестерней 78 - ведомая цилиндрическая шестерня 79. Таким образом, замыкается кинематическая цепь привода колебаний верхнего звена 72. Одновременно размыкается кинематическая цепь привода нижнего звена, т.к. третья коническая шестерня 82 выходит из сцепления с ведомой конической шестерней 80.
Вращение вала 77 через цилиндрические шестерни 78-79 передается на первый червяк 70, входящий в сцепление с первым червячным сегментным колесом 68. Червячное колесо неподвижно закреплено на боковой стенке первого звена опоры с возможностью свободного колебания относительно оси 113.
Вращение от ведущей конической шестерни 80 через ведомую коническую шестерню 81 и цилиндрические шестерни 78 и 79 передается на червячную пару 70-68. Таким образом, замыкается кинематическая цепь привода верхнего звена опоры 72.
В остальном принцип действия шестого варианта опорного узла совпадает с пятым вариантом. Узел дистанционного изменения направления движения ШУ (см. фиг.15) предназначен для создания шагающего робота, которым можно управлять дистанционно с помощью радиосигналов, аналогично радиоуправляемым макетам автомобилей и самолетов. Такие роботы могут быть использованы в качестве планетоходов, для транспортировки телевизионных информационных систем, для осмотра и подрыва взрывчатых веществ в системе МЧС и т.д.
Рулевой узел, представленный на фиг.3, заменяется на узел дистанционного изменения направления движения на фиг.15.
Ось вращения 117 устанавливается перпендикулярно платформе 11. На оси с возможностью свободного поворота установлены внутренняя 118 и внешняя 119 трубчатые валы. На нижнем наконечнике внутреннего трубчатого вала 118 неподвижно установлено нижнее 120 ведущее зубчатое колесо (звезда). На внешнем трубчатом валу 119 также неподвижно установлено верхнее 121 ведущее зубчатое колесо (звезда). Вращение от ведущих зубчатых колес (звезд) 120 и 121 с помощью нижнего 122 и верхнего 123 зубчатых ремней (цепей) передается на четные 16, 18, 20 и нечетные 15, 17, 19 ведомые зубчатые колеса (звезды), неподвижно установленные на осях поворота четных и нечетных опор (см. фиг.2).
На подставке 135 установлен электродвигатель с редуктором 124. Электродвигатель должен быть реверсивным и питаться от аккумулятора.
На валу электродвигателя неподвижно установлена первая ведущая коническая шестерня 125. Ведущая коническая шестерня по очереди входит в сцепление с первой 126 и второй 127 ведомыми коническими шестернями, переключение ведомых шестерен осуществляется с помощью третьего электромагнита 128 и пружины 133. Первая коническая шестерня 126 установлена на верхнем наконечнике внутреннего вала 118, с возможностью продольного смещения, например на шлицах. Выдвижная ось вращения шестерни 126 служит стержнем третьего электромагнита 128. На оси 129 с помощью хомута 130 неподвижно закреплены верхняя 131 и нижняя 132 вилки переключателя шестерен 126 и 127 соответственно. Верхние наконечники внутреннего 118 и внешнего 119 валов имеют шлицевые выступы, которые входят в сцепление с шлицевыми выступами первой 126 и второй 127 конических шестерен соответственно.
При отключенном третьем электромагните 128 под воздействием пружины 133 верхняя вилка 131 вводит первую ведомую коническую шестерню 126 в сцепление с ведущей конической шестерней 125. Вращение вала электродвигателя через коническую пару 125-126, внутренний вал 118 и нижнее зубчатое колесо (звезда) 120 и зубчатый ремень (цепь) 122 передается на поворот осей четных опор.
При включении электромагнита 128 выдвижная ось 129 поднимается вверх и с помощью второй вилки 132 вводит вторую ведомую коническую шестерню 127 в сцепление с ведомой 125. Вращение второй ведомой шестерни через верхний вал 129 передается на верхнее зубчатое колесо (звезду) 121.
Вращение от верхнего зубчатого колеса (звезду) 121 через верхней зубчатый ремень (цепь) 123 передается на ведомые зубчатые колеса (звезды) 15, 17, 19 ориентации нечетных опор. В остальном принцип работы ШУ совпадает с принципом действия ШУ с ручной ориентацией четных и нечетных опор.
Шагающее устройство перемещается по рельефной поверхности земли, переступая через препятствия, поднимается и спускается по лестнице, позволяет инвалиду самостоятельно сесть в общественный транспорт и сходить с него без посторонней помощи. Шагающее устройство может быть использовано для транспортировки информационных телевизионных систем, для ликвидации взрывчатых устройств в системе МЧС и т.д. Устройством легко можно управлять дистанционно с помощью радиотелемеханической системы.
Шагающее устройство позволяет легко осуществить дистанционное управление его движением по поверхности планет, под водой, в среде с повышенной радиацией и температурой, в бактериальной среде и т.д.
| название | год | авторы | номер документа |
|---|---|---|---|
| ШАГАЮЩАЯ ИНВАЛИДНАЯ КОЛЯСКА | 2009 |
|
RU2404900C1 |
| ШАГАЮЩИЙ ВЕЗДЕХОД | 2007 |
|
RU2356775C2 |
| ВОЛНОВОЕ ЭНЕРГЕТИЧЕСКОЕ УСТРОЙСТВО (ВАРИАНТЫ) | 2008 |
|
RU2373424C1 |
| ПРЕОБРАЗОВАТЕЛЬ ЭНЕРГИИ ТЕКУЧЕЙ СРЕДЫ (ВАРИАНТЫ) | 2004 |
|
RU2280782C2 |
| ВОЛНОВОЙ ДВИГАТЕЛЬ (ВАРИАНТЫ) | 2006 |
|
RU2329396C2 |
| ВЕТРОЭНЕРГЕТИЧЕСКАЯ УСТАНОВКА | 2004 |
|
RU2280785C1 |
| ВЕТРОЭНЕРГЕТИЧЕСКАЯ УСТАНОВКА | 2007 |
|
RU2392487C2 |
| ПРЕОБРАЗОВАТЕЛЬ ЭНЕРГИИ ВЕТРА | 2004 |
|
RU2275529C1 |
| ВЕЛОСИПЕД (ВАРИАНТЫ) | 2009 |
|
RU2404901C2 |
| ПРЕОБРАЗОВАТЕЛЬ ЭНЕРГИИ ВОЛН | 2005 |
|
RU2300663C1 |
Изобретения относятся к транспортным устройствам и могут быть применены в шагающей инвалидной коляске. Шагающее устройство содержит платформу, приводы и шесть опорных узлов, блок управления, кресло и рулевой узел. Первое центральное зубчатое колесо (звезда) с помощью первого зубчатого ремня (цепи) кинематически связано и взаимодействует с нечетными периферийными зубчатыми колесами (звездами) ориентации. Второе центральное зубчатое колесо (звезда) с помощью второго зубчатого ремня (цепи) взаимодействует с четными зубчатыми колесами (звездами) ориентации. Периферийные зубчатые колеса (звезды) ориентации взаимодействуют с соответствующими опорными узлами. В первом варианте приводы опорных узлов выполнены в виде кинематически связанных цепью первой и второй центральных и шести периферийных зубчатых колес (звезд) изменения направления движения опор, взаимодействующих с рулевым узлом. Во втором варианте шагающее устройство содержит первый и второй электродвигатели с редуктором, при этом приводы опор выполнены в виде кинематически связанных зубчатым ремнем (цепью) центрального зубчатого колеса (звезды) и шести периферийных зубчатых колес (звезд) поступательного движения, взаимодействующих с соответствующими опорными узлами. Блок изменения направлением движения выполнен в виде первого и второго центральных зубчатых колес (звезд) ориентации, взаимодействующих с рулевым узлом. Достигается упрощение конструкции, снижение себестоимости и повышение скорости движения шагающего устройства. 2 н. и 10 з.п. ф-лы, 15 ил.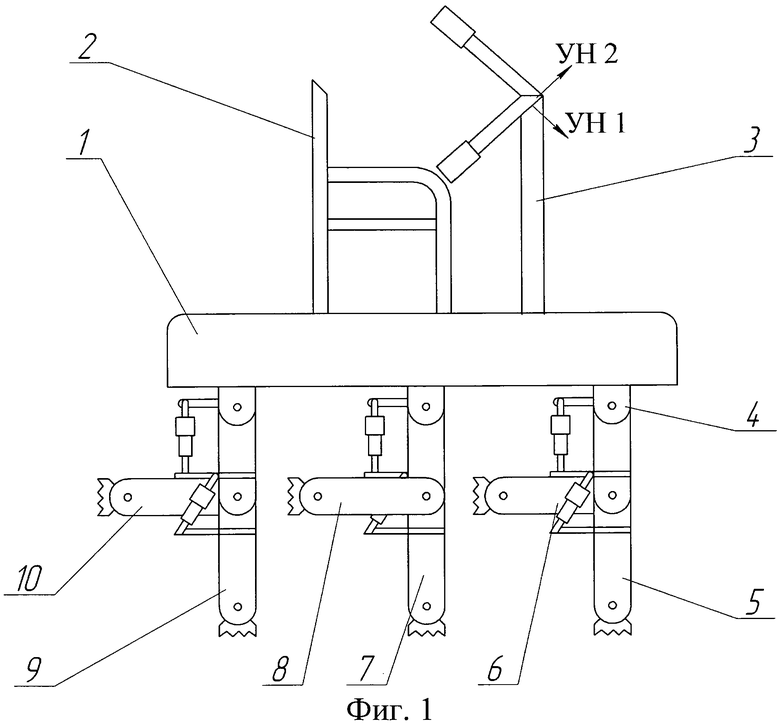
1. Шагающее устройство, содержащее аккумулятор, платформу, приводы и шесть опорных узлов, а также блок управления, отличающееся тем, что содержит дополнительно кресло и рулевой узел, при этом приводы опорных узлов выполнены в виде кинематически связанных цепью первой и второй центральных и шести периферийных зубчатых колес (звезд) изменения направления движения опор, взаимодействующих с рулевым узлом, при этом первое центральное зубчатое колесо (звезда) с помощью первого зубчатого ремня (цепи) кинематически связано и взаимодействует с нечетными периферийными зубчатыми колесами (звездами) ориентации, а второе центральное зубчатое колесо (звезда) с помощью второй цепи взаимодействует с четными зубчатыми колесами (звездами) ориентации, причем периферийные зубчатые колеса (звезды) ориентации взаимодействуют с соответствующими опорными узлами.
2. Шагающее устройство по п.1, отличающееся тем, что рулевой узел содержит стойку руля, шлицевой диск, первые и вторые рычаги управления, втулки фиксации ориентации опор, первые и вторые трубчатые валы и установочные втулки, при этом верхние наконечники первого и второго трубчатых валов через установочные втулки неподвижно связаны с соответствующими рычагами управления, на которых с возможностью поступательного движения установлены соответствующие втулки фиксации ориентации опор, взаимодействующие со шлицевым диском, неподвижно связанные со стойкой руля, кроме того, на нижних наконечниках первого и второго трубчатых валов неподвижно установлены соответствующие центральные зубчатые колеса (звезды) ориентации.
3. Шагающее устройство по п.1, отличающееся тем, что каждый опорный узел состоит из оси поворота, первого и второго рычагов, первого и второго гидротелескопических (пневмотелескопических) устройств, при этом первый рычаг неподвижно связан с осью поворота опоры, первое гидротелескопическое (пневмотелескопическое) устройство шарнирно связано и взаимодействует с первым и вторым рычагами, а второе гидротелескопическое (пневмотелескопическое) устройство шарнирно связано с осью поворота опоры и неподвижно соединено со вторым рычагом.
4. Шагающее устройство по п.1, отличающееся тем, что опорный узел содержит кинематически связанные вилку, поворотную платформу, первый и второй реверсивные электродвигатели с редукторами, первую и вторую червячные пары, при этом вилка неподвижно связана с ведомой периферийной звездой и поворотной платформой, шарнирно связанной с первым звеном опоры, в корневой части которого установлено сегментное червячное колесо, взаимодействующее с первым червяком, неподвижно установленным на валу первого электродвигателя с редуктором, при этом второй электродвигатель с редуктором закреплен на первом звене опоры и через вторую червячную пару взаимодействует со вторым звеном опоры.
5. Шагающее устройство по п.4, отличающееся тем, что опорный узел содержит дополнительно многозвенный удлинитель опоры, состоящий из шарнирно связанных звеньев, образующих последовательную цепочку ромбов, при этом второе гидротелескопическое (пневмотелескопическое) устройство шарнирно связано с вертикальными узловыми точками первого ромба, а цилиндр его через рычаг связан и взаимодействует со штоком первого гидротелескопического устройства, кроме того, нижний узел последнего ромба шарнирно связан с подпятником.
6. Шагающее устройство по п.1, отличающееся тем, что опорный узел состоит из кинематически связанных первого и второго звеньев, первого и второго гидротелескопических (пневмотелескопических) устройств, первого, второго и третьего рычагов, при этом первое гидротелескопическое (пневмотелескопическое) устройство шарнирно связано с первым и вторым рычагами, второе гидротелескопическое (пневмотелескопическое) устройство также шарнирно связано со вторым и третьим рычагами, которые неподвижно связаны с первым и вторым звеньями опоры соответственно, кроме того, первый рычаг неподвижно связан с осью вращения опоры, шарнирно связанной с верхним наконечником первого звена, шарнирно связанного со вторым звеном опоры.
7. Шагающее устройство по п.6, отличающееся тем, что блок управления состоит из источника ЭДС, восьми последовательно коммутируемых реле, гидронасоса и двадцати четырех электрогидроклапанов, связанных шлангами с соответствующими гидротелескопическими (пневмотелескопическими) устройствами.
8. Шагающее устройство по п.7, отличающееся тем, что опорный узел содержит кинематически связанные вилку, поворотную платформу, первый и второй реверсивные электродвигатели с редукторами, первую и вторую червячные пары, при этом вилка неподвижно связана с ведомой периферийной звездой и поворотной платформой, а также шарнирно с первым звеном опоры, в корневой части которого установлена сегментная червячная шестерня, взаимодействующая с первой червячной шестерней, установленной на валу первого электродвигателя с редуктором, при этом второй электродвигатель с редуктором, закрепленный на первом звене опоры через вторую червячную пару, взаимодействует со вторым звеном опоры.
9. Шагающее устройство, содержащее платформу, кинематически связанный электродвигатель с редуктором, приводы и шесть опорных узлов, а также блок управления, отличающееся тем, что содержит дополнительно кресло, рулевой узел и второй электродвигатель с редуктором, а приводы опор выполнены в виде кинематически связанных зубчатым ремнем (цепью) центрального зубчатого колеса (звезды) и шести периферийных зубчатых колес (звезд) поступательного движения, взаимодействующих с соответствующими опорными узлами, кроме того, блок изменения направлением движения также выполнен в виде первого и второго центральных зубчатых колес (звезд) ориентации, взаимодействующих с рулевым узлом, при этом первое центральное зубчатое колесо (звезда) ориентации с помощью первого зубчатого ремня (цепи) кинематически связано и взаимодействует с нечетными периферийными зубчатыми колесами (звездами) ориентации, а второе центральное зубчатое колесо (звезда) ориентации с помощью второго зубчатого ремня (цепи) взаимодействует с четными зубчатыми колесами (звездами) ориентации, причем периферийные зубчатые колеса (звезды) ориентации взаимодействуют с соответствующими опорными узлами.
10. Шагающее устройство по п.9, отличающееся тем, что опорный узел состоит из поворотной платформы, связанной с периферийным зубчатым колесом (звездой) ориентации, на которой установлены кинематически связанные ведущий первый вал, первая, вторая, третья, четвертая, пятая конические шестерни, первая, вторая цилиндрические шестерни, второй (гибкий) вал, первая и вторая червячные пары, взаимодействующие с первым и вторым звеньями опоры, а также электромагнит, подключенный к блоку управления, при этом на втором валу неподвижно установлены первая цилиндрическая, вторая, третья и четвертая конические шестерни, кроме того, первый электромагнит взаимодействует со вторым валом и обеспечивает поочередное взаимодействие ведущей конической шестерни то через вторую коническую шестерню, цилиндрическую пару шестерен и первую червячную пару с первым (верхним) звеном опоры, то через третью, четвертую и пятую шестерню, гибкий вал с удлинителем и вторую червячную пару со вторым (нижним) звеном опоры.
11. Шагающее устройство по п.10, отличающееся тем, что опорный узел состоит из поворотной платформы, связанной с периферийной звездой ориентации, на которой установлены кинематически связанные ведущий первый вал, первая, вторая, третья, четвертая, пятая конические шестерни, первая, вторая цилиндрические шестерни, второй и третий валы, первая и вторая червячные пары, взаимодействующие с первым и вторым звеньями опоры, а также шестая, седьмая и восьмая конические шестерни, первый и второй электромагниты, подключенные к блоку управления, при этом шестая и седьмая конические шестерни периодически входят в сцепление и взаимодействуют с восьмой конической шестерней, неподвижно установленной на сердечнике второго электромагнита, имеющей возможность продольного смещения вдоль оси колебания первого звена опоры.
12. Шагающее устройство по п.11, отличающееся тем, что содержит дополнительно узел дистанционного изменения направления движения шагающего устройства, состоящий из оси вращения, внутреннего и внешнего трубчатых валов, нижних и верхних зубчатых колес (звезд) и зубчатых ремней (цепей) ведущей первой и второй ведомых конических шестерен электродвигателя, и третьего электромагнита, стержень которого служит выдвижной осью ведомых конических шестерен и неподвижно связан с первой и второй вилками переключателя шестерен и взаимодействует с пружиной, при этом ведущая шестерня по очереди взаимодействует с первой и второй ведомыми коническими шестернями, установленными с возможностью продольного смещения на верхних наконечниках со шлицевыми выступами внутреннего и внешнего трубчатых валов, на нижних наконечниках которых неподвижно установлены нижнее и верхнее зубчатые колеса (звезды) соответственно.
| ШАГАЮЩИЙ ВЕЗДЕХОД | 2007 |
|
RU2356775C2 |
| Шагающее устройство | 1978 |
|
SU892057A1 |
| US 5005658 A, 09.04.1991 | |||
| US 2002060267 A1, 23.05.2002 | |||
| Устройство для преобразования возвратно-поступательного движения в шаговое вращательное | 1985 |
|
SU1280250A1 |
| US 5219410 A, 15.06.1993. | |||

