(54) ШАГАЮЩЕЕ УСТРОЙСТВО
| название | год | авторы | номер документа |
|---|---|---|---|
| ШАГАЮЩАЯ ИНВАЛИДНАЯ КОЛЯСКА | 2009 |
|
RU2404900C1 |
| ШАГАЮЩИЙ ВЕЗДЕХОД | 2007 |
|
RU2356775C2 |
| ШАГАЮЩЕЕ УСТРОЙСТВО (ВАРИАНТЫ) | 2010 |
|
RU2448859C2 |
| ПРЕОБРАЗОВАТЕЛЬ ЭНЕРГИИ ВЕТРА И ВОЛН | 2003 |
|
RU2254494C2 |
| ВОДНАЯ ЭНЕРГЕТИЧЕСКАЯ УСТАНОВКА (ВАРИАНТЫ) | 2008 |
|
RU2370661C1 |
| ПРЕОБРАЗОВАТЕЛЬ ДВИЖЕНИЯ АЛИЕВЫХ | 2007 |
|
RU2349814C1 |
| ПРЕОБРАЗОВАТЕЛЬ ЭНЕРГИИ ТЕКУЧЕЙ СРЕДЫ (ВАРИАНТЫ) | 2004 |
|
RU2280782C2 |
| ВЕТРОЭНЕРГЕТИЧЕСКОЕ УСТРОЙСТВО | 2005 |
|
RU2281413C1 |
| ПРЕОБРАЗОВАТЕЛЬ ЭНЕРГИИ ТЕКУЧЕЙ СРЕДЫ (ВАРИАНТЫ) | 2003 |
|
RU2253039C2 |
| ВЕТРОЭНЕРГЕТИЧЕСКАЯ УСТАНОВКА | 2007 |
|
RU2392487C2 |
Изобретение относится к транспортным устройствам и может быть применено в шагающем роботе.
Известно шагающее устройство для перемещения информационных приборов, состоящее из четырех блоков: корпуса, выполненного в виде щтанги, на которой располагаются все блоки устройства, подвижного информационного и управляющего блока, двух одинаковых опор. Опоры соединены со щтангой при помощи двух цилиндрических шарниров со взаимно перпендикулярными осями 1.
Недостатком этого устройства является сложность в управлении и отсутствие маневренности в движении.
Наиболее близким по технической сущности и достигаемому результату к изобретению является шагающее устройство, содержащее корпус, двигатель, приводы и связанные с ними опоры 2.
Однако для устранения горизонтальных качений во время его шагания по рельефной поверхности устройство снабжено следящим механизмом. Это усложняет устройство, снижает его маневренность.
Цель изобретения - упрощение конструкции устройства и повышение его проходимости.
Поставленная цель достигается тем, что каждый привод выполнен в виде планетарной передачи, содержащей водило, связанное с двигателем, неподвижное центральное колесо с внутренними зубьями и зацепляющийся с ним сателлит, диаметр делительной окружности которого вдвое меньше диаметра неподвижного центрального колеса, каждая опора выполнена в виде послеtoдовательно сочлененных посредством шарниров и узлов фиксации рычагов, а устройство снабжено подвижной вокружном направлении крыщкой с диаметральным пазом и связанным с сателлитом, соосно уста 5 новленным ему, колесом, тягами, связывающими рычаги опор с колесом, и кронщтейном, взаимодействующим с колесом, пазом крышки и одним из рычагов опоры. Кроме того, связь сателлита с колесом выполнена в виде шлицевого соединения, а узлы фик20сации - в виде храповых механизмов, соединенных с тягой.
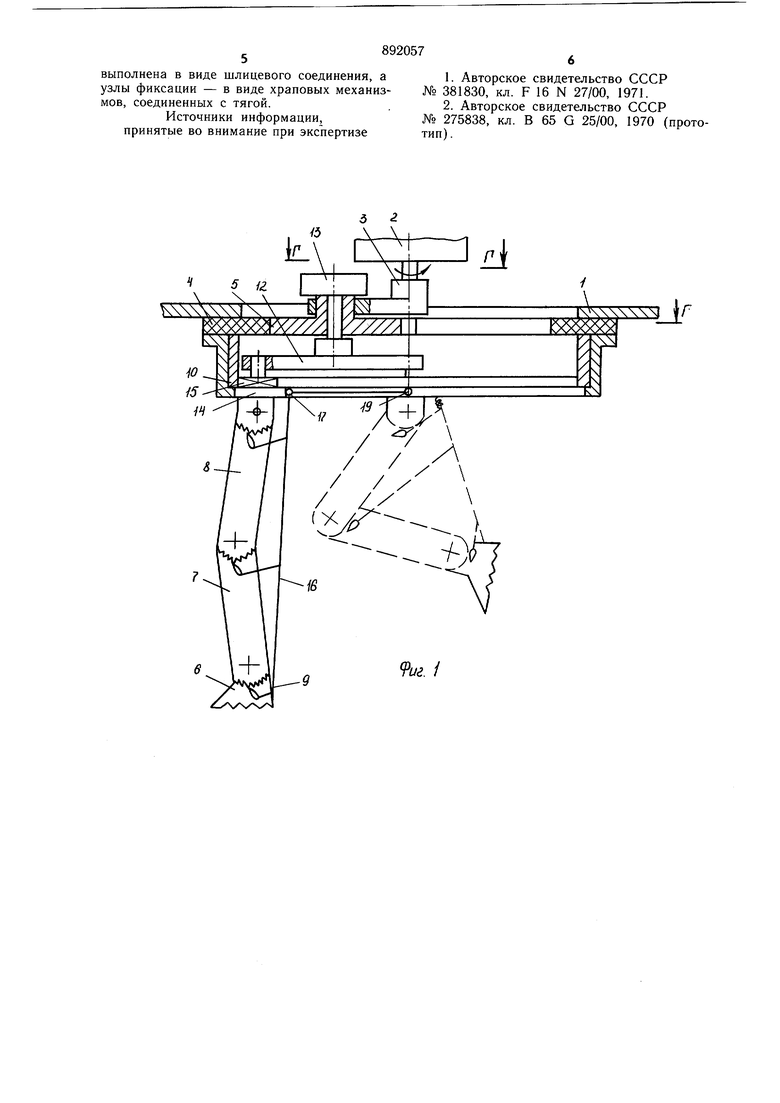
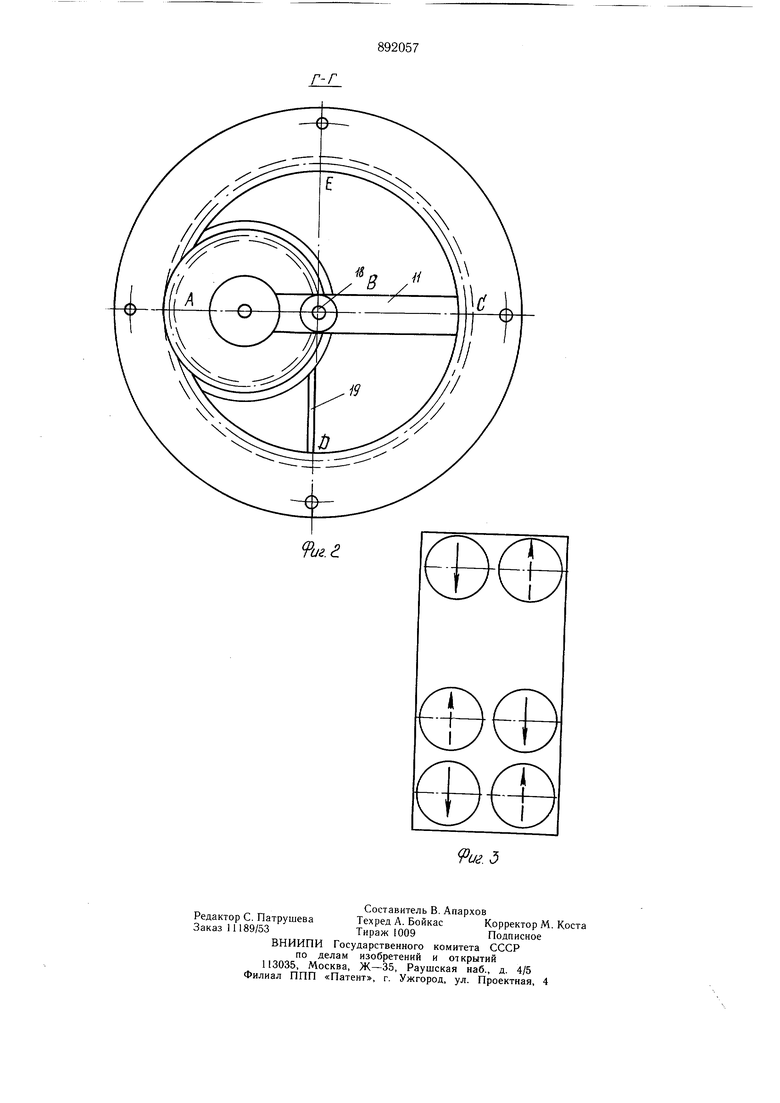
На фиг. 1 приведена конструкция шагающего устройства; на фиг. 2 - сечение Г-Г на фиг. 1; на фиг. 3 - схема крепления проводов к корпусу. Шагающее устройство содержит корпус 1, двигатель 2, выходной вал которого связан с водилом 3 планетарной передачи, неподвижное центральное колесо 4 которого зацепляется с сателлитом 5, диаметр делительной окружности которого вдвое меньше диаметра неподвижного центрального колеса 4. Каждая опора устройства выполнена в виде последовательно сочлененных посредством шарниров и узлов фиксации рычагов 6-8. Узлы фиксации могут быть выполнены в виде храповых механизмов 9. В корпусе 1 установлена подвижная в окружном направлении крышка 10 с диаметральным пазом 11, а соосно сателлиту 5 установлено колесо 12, связанное с ним соединением 13, допускающим при необходимости относительный разворот сателлита 5 с колесом 12. Колесо 12 шарнирно связано с кронштейном 14, имеющим кулачок 15, взаимодействующий с диаметральным пазом 11. Свободный конец кронштейна шарнирно связан с рычагом 8 опоры. Для большей устойчивости используется шесть опор (фиг. 3): три в рабочем положении, а три - в режиме перешагивания 25 (холостого хода). Может быть использовано и другое количество опор и их расположение на корпусе. Узлы фиксации и рычаги опор через тяги 16 соединены с колесом 12 в точке В. При этом тяга может быть пропущена через блоки 17 (связанный с крон- 30 штейном), 18 (установленный в центральной части крышки с пазом) и 19 (установленный на правой половине крышки). Устройство работает следующим образом. Вращение вала двигателя 2 (например электродвигателя с редуктором) с помощью водила 3 передается на сателлит 5, находящийся в постоянном зацеплении с центральным колесом 4. Поскольку делительные окружности центрального колеса 4 и сателлита 5 выбраны в отношении 2:1, любая о точка касания их делительных окружностей при вращении водила на один оборот перемещается вдоль всего диаметра неподвижного колеса и обратно. Так, точка А (фиг. 2) перемешается по диаметру А-С, а точка В - по диаметру D-Е. Колесо 12 вращается совместно с сателлитом 5. При этом ось вращения кронштейна 14 соответствует радиусу делительной окружности сателлита 5, в силу чего кронштейн совершает возвратно-поступательное движение вдоль паза 11. При рабочем ходе, когда кронштейн 14 перемещается от точки А к С, точка В колеса движется от D и обратно; и тяга 16 находится в ненатяженном состоянии. Под собственным весом или под действием соециальных пружинок звенья опор выпрямляются полностью, и это положение фиксируется храповым механизмом в начале рабочего хода. Если местность, по которой перемещается устройство, неровная, опоры растягиваются на разную длину. При этом корпус сохраняет горизонтальное положение, так как положение его задается периодически меняющими трение опорами, и перемещается вперед. При обратном ходе кронштейна 14 (от С до А) точка В колеса 12 движется на участке В-Е, тяга отключает храповой механизм, звенья опор сгибаются, и опора целиком смещается до левого крайнего положения (точка А). При приближении к этой точке тяга расслабляется, и опора выпрямляется на столько, на сколько позволяет ей местность. Цикл повторяется. При относительном развороте колеса 12 относительно сателлита 5 одновременно меняется положение крышки 10 с пазом 11 (В остальное время положение крышки 10 фиксируется любым стопорным устройством), при этом обеспечивается изменение направления движения устройства. Соединение 13 может быть выполнено в виде шлицевого соединения или муфты. При дистанционном направлении поворота и устройства узел связи может быть выполнен на шаговых двигателях. Меняя полярность число управляющих импульсов, можно направить устройство в любую сторону. При этом разворот может быть осуществлен одновременно во всех опорах или только в двух передних. В последнем случае устройство разворачивается плавно, но его корпус должен быть сочлененным. Шагающее устройство может существенно повысить эффективность манипуляторов и роботов. Формула изобретения 1. Шагающее устройство, содержащее корпус, двигатель, приводы и связанные с ними опоры, отличающееся тем, что, с целью упрощения конструкции устройства и повышения его проходимости, каждый привод выполнен в виде планетарной передачи, содержащей водило, связанное с двигателем, неподвижное центральное колесо с внутренними зубьями и зацепляющийся с ним сателлит, диаметр делительной окружности которого вдвое меньше диаметра неподвижного центрального колеса, каждая опора выполнена в виде последовательно сочлененных посредством шарниров и узлов фиксации рычагов, а устройство снабжено подвижнои в окружном направлении с диаметральным пазом и связанным с сателлитом, соосно установленным ему колесом, тягами, связывающими рычаги опор с колесом, и кронштейном, взаимодействующим с колесом, пазом крышки и одним из рычагов опоры. 2. Шагаюц.1,ее устройство по п. 1, отличающееся тем, что связь сателлита с колесом
выполнена в виде шлицевого соединения, а узлы фиксации - в виде храповых механизмов, соединенных с тягой.
Источники информации, принятые во внимание при экспертизе
№ 275838, кл. В 65 G 25/00, 1970 (прототип).
