Настоящее изобретение относится к способам транспортирования грузов в толще воды со дна водоема на его поверхность, как с небольших, так и со значительных глубин, находящийся на больших расстояниях, непосредственно на берег. Способ может применяться в различных отраслях хозяйства для транспортировки разногабаритного груза в любое время года и при любой ледовой обстановке, в т.ч. в экстремальных условиях Северного Ледовитого океана.
Известны способы транспортирования грузов с использованием системы морских портов надводного базирования (журнал «Военный парад» №1, 2007 г., стр. 60, 61), морских судов ледокольного типа (журнал «Военный Парад», №5, 2005 г., стр. 32) и спутниковых навигационных систем.
В экстремально суровых условиях севера морские порты покрываются льдом, что затрудняет швартовку и усложняет обработку грузов. Ледоколы решают проблему перевозки грузов, но в условиях прохождения тяжелых льдов имеют малую крейсерскую скорость. Кроме этого, сложная транспортная система требует применения дополнительных устройств и механизмов для поднятия грузов с глубины.
Известны способы транспортирования грузов с использованием системы подводных лодок военного назначения, базирующихся в надводных портах (журнал «Военный парад», №1, 2006 г.), способных перемещаться подо льдом на большие расстояния (Журнал «Военный парад», №6, 2006 г., стр.36) и имеющих навигационную гидроакустическую систему (Подводные лодки. Шунков В.Н. М., изд. «Попурри», 2005. с. - 608, журнал «Военный парад», №5, 2005 г., с. 30). Достоинством подводных лодок является высокая крейсерская скорость и способность перемещаться в подводном положении подо льдом.
Недостатком является высокая стоимость транспортировки груза, сложность управления логистикой, возможности по перевозке грузов очень ограничены, как из-за сложности погрузки, так и разгрузки.
Известен способ перемещения подводного транспортного средства, подвешенного на канатной дороге, посредством тягового механизма или с помощью движителей (патент RU 2320515, МПК B63G8/00, B61B11/00, 27.03.2008).
Недостатком способа является ограниченная длина каната из-за его провисания и невозможности осуществлять его поддержку, а также наличие энергозависимых движителей.
Наиболее близким является способ транспортировки негабаритных подводных объектов, согласно которому подводному объекту сообщают положительную плавучесть за счет приложения суммарной подъемной силы множества не связанных между собой погружаемых плавучих тел постоянного водоизмещения, для чего перед транспортировкой объекта плавучие тела погружают на глубину расположения объекта и удерживают их совместно внутри сетчатой оболочки, предварительно прочно связанной с объектом транспортировки, а транспортировку объекта осуществляют за счет совместного действия не менее двух самоходных подводных средств, преимущественно подводных лодок (патент RU 2500569, МПК B61C7/06, B63G8/00, 10.12.2013).
Недостатком способа является сложность управления, наличие энергозависимых движителей.
Задачей является разработка способа подводного горизонтального и вертикального перемещения грузов без использования энергозависимых движителей.
Техническим результатом является упрощение способа подводного перемещения грузов.
Технический результат достигается в способе подводного перемещения грузов, посредством изменения плавучести, при этом груз перемещается на грузовой понтонной автоматизированной платформе, снабженной резервуаром со сжатым воздухом и эластичными мешками, по чередующимся восходящим и нисходящим участкам транспортировочной трассы посредством повышения плавучести нагнетанием воздуха в эластичные мешки для прохождения восходящих участков и понижения плавучести спусканием воздуха из эластичных мешков для прохождения нисходящих участков трассы.
Сущность способа заключается в изменении плавучести грузовой понтонной автоматизированной платформы (ГПАП) созданием поочередно подъемной силы, тянущей ГПАП вверх, и отрицательной плавучести, опускающей ГПАП вниз, которая в сочетании с возможностью перемещения ГПАП только вдоль наклонно расположенных направляющих в виде поочередных восходящих и нисходящих участков трассы, обеспечивает направленное движение ГПАП. Изменение плавучести ГПАП обеспечивается с помощью резервуара со сжатым под большим давлением воздухом и эластичных мешков, которые наполняются воздухом для движения по восходящим участкам трассы и опустошаются (воздух спускается) для движения по нисходящим участкам трассы. Экстремальные участки трассы (точки перегиба восходящий/нисходящий и нисходящий/восходящий участков трассы) снабжены стопорами обратного хода, обеспечивающими одностороннее движение ГПАП по трассе. При необходимости двустороннего перемещения грузов, трассу зацикливают и обеспечивают перемещение ГПАП по кругу.
Таким образом, способ не требует использования энергозависимых движителей и сложных систем управления
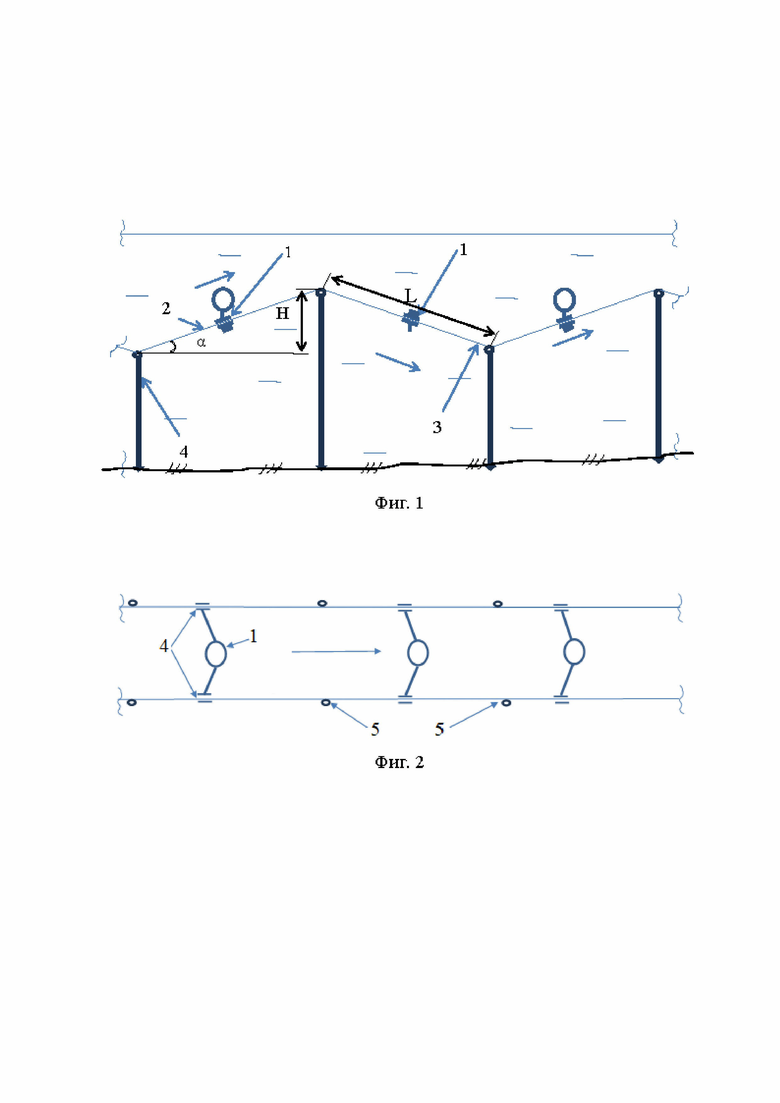
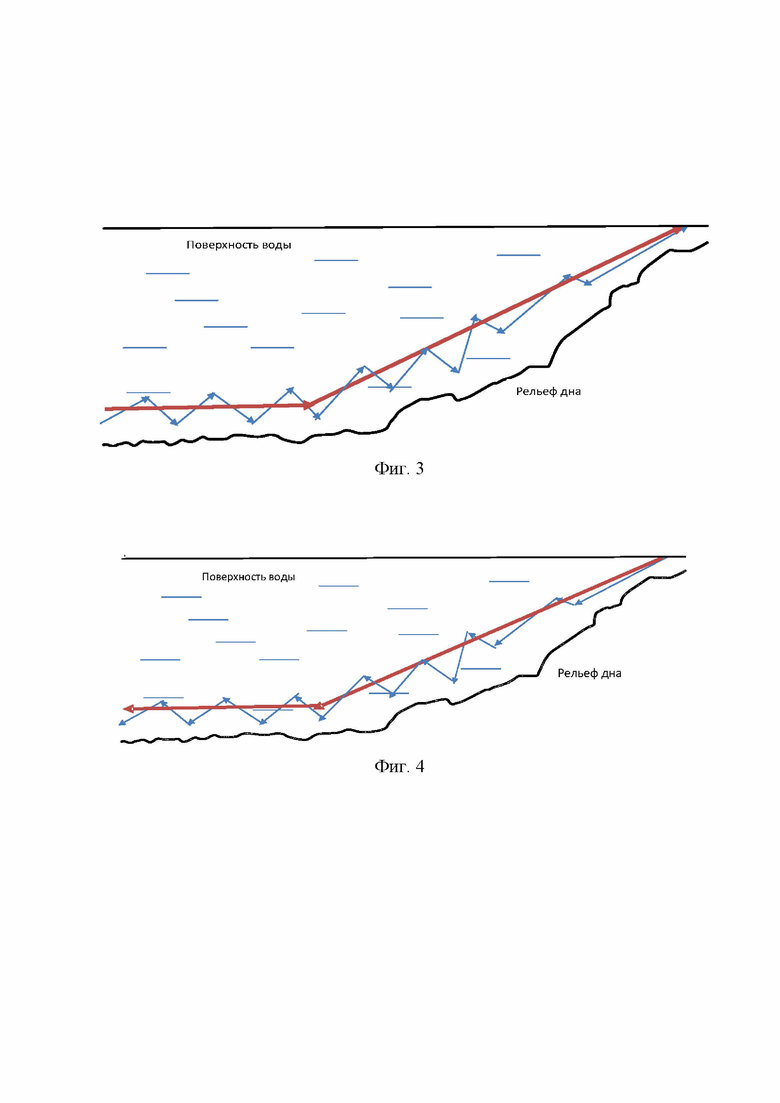
Схема заявляемого способа подводного перемещения грузов представлена на фиг. 1 (вид сбоку) и на фиг. 2 (вид сверху). Траектория движения груза из воды на поверхность представлена на фиг. 3, а траектория движения груза с поверхности в воду представлена на фиг. 4.
Грузовая понтонная автоматизированная платформа 1, установленная на восходящих 2 и нисходящих 3 направляющих посредством узлов скольжения 4 может быть снабжена роботизированными системами погрузки-разгрузки. Узлы скольжения 4 перемещаются вдоль направляющих вместе с ГПАП. Направляющие 2 и 3 крепятся ко дну водоема посредством опор 5 различной длины и установлены под углом α, обеспечивающим им заданный наклон (положительный или отрицательный). При этом трасса представляет собой ломаную линию, средняя линия которой имеет положительный наклон для перемещения груза вверх и отрицательный наклон для перемещения груза вниз. При перемещении по прямой, средняя линия наклона не имеет.
На фиг. 3 и 4 синие стрелки показывают ломаные траектории движения платформы 1 по направляющим 2, 3, а красные стрелки показывают вектор направления движения платформы 1.
Угол наклона α должен быть задан таковым, чтобы горизонтальная составляющая результирующей силу подъема/спуска была более сил трения узла скольжения ГПАП о направляющую и сопротивления среды. Величина угла определяет саму возможность движения ГПАП по восходящим и нисходящим направляющим посредством узла скольжения – существует величина угла αмин, при котором движение невозможно, т.к. сила трения в узле скольжения ГПАП и сила сопротивления среды будут превосходить силу, тянущую ГПАП по направляющей.
Конкретное конструктивное значение угла αконстр лежит в диапазоне αмин < αконстр <αмакс, где αмакс - является параметром, зависящим от большого количества входных величин (формула (2) и (3)). При увеличении угла возрастает скорость v перемещения при одинаковом значении разницы выталкивающей силы и силы тяжести  , но при этом уменьшается длина перемещения (H/tgα), а, следовательно, и весь путь перемещения при n циклах работы системы, поэтому угол αконстр определяется в зависимости от поставленной технической задачи.
, но при этом уменьшается длина перемещения (H/tgα), а, следовательно, и весь путь перемещения при n циклах работы системы, поэтому угол αконстр определяется в зависимости от поставленной технической задачи.
Уравнение поступательного движения ГПАП вверх по направляющим описывается формулой:

где f –коэффициент трения узла скольжения ГПАП о направляющую,
μ – коэффициент вязкого сопротивления, зависящий от формы ГПАП,
Q – суммарный вес вытесняемой воды за n циклов подъема-спуска,
Mg – вес ГПАП,
α – угол наклона направляющей,
v – скорость движения ГПАП в заданное время t, м/с,
n – количество циклов подъема-спуска, равное количеству восходящих и нисходящих участков,
t – время движения, с.
В результате решения уравнения (1) определяется закон движения ГПАП на каждом из участков v=v(t, α), что дает возможность определить время τ прохождения заданного участка длины L в зависимости от угла наклона α направляющей.
Скорость ГПАП при движении вверх описывается формулой:

где f – коэффициент трения узла скольжения ГПАП о направляющую,
μ – коэффициент вязкого сопротивления, зависящий от формы ГПАП,
Q – суммарный вес вытесняемой воды за n циклов подъема-спуска,
Mg – вес ГПАП,
α – угол наклона направляющей, град,
v – скорость движения ГПАП в заданное время t, м/с,
n – количество циклов подъема-спуска, равное количеству восходящих и нисходящих участков,
t – время движения, с,
e – константа (число Эйлера), равная 2,7182.
Скорость ГПАП при движении вниз описывается формулой:

где f – коэффициент трения узла скольжения ГПАП о направляющую,
μ – коэффициент вязкого сопротивления, зависящий от формы ГПАП,
Q – суммарный вес вытесняемой воды за n циклов подъема-спуска, Н,
Mg – вес ГПАП, Н,
α – угол наклона направляющей, град,
v - скорость движения ГПАП в заданное время t, м/с,
n – количество циклов подъема-спуска, равное количеству восходящих и нисходящих участков,
t –время движения, с,
e – константа (число Эйлера), равная 2,7182.
Способ подводного перемещения грузов реализуется следующим образом. Установка ГПАП на направляющих посредством узлов скольжения ограничивает возможность их перемещения движением только вдоль направляющих. В начальный момент времени, груженая ГПАП находится неподвижно в начале восходящего участка трасы. С управляющего контроллера подается первичный сигнал о начале движения. Из резервуара со сжатым под большим давлением воздухом воздух подается в эластичные мешки, они надуваются, система приобретает положительную плавучесть, ГПАП стремиться всплыть вверх за счет избыточной выталкивающей силы и начинает движение вдоль восходящего участка трассы, перемещаясь узлами скольжения по направляющим. По достижении точки перегиба восходящий/нисходящий участок трассы, из эластичных мешков спускается воздух, ГПАП приобретает отрицательную плавучесть, стремиться опуститься на дно за счет силы тяжести и начинает движение вдоль нисходящего участка трассы, перемещаясь узлами скольжения по направляющим. По достижении точки перегиба нисходящий/восходящий участок трассы, воздух вновь подается в эластичные мешки, и цикл повторяется сначала, вплоть до достижения цели перемещения груза.
В экстремальных участках трассы (точки перегиба восходящий/нисходящий и нисходящий/восходящий участков трассы) ГПАП находится в «мгновенно неподвижном» состоянии (момент смены направления вектора результирующей силы, при котором в следующий момент ГПАП либо начнет опускаться, либо подниматься).
В точке локального минимума – когда ГПАП совершила спуск по нисходящему участку трассы в какой-то расчетный нижний участок нисходящей трассы, система уже должна начать накачивать воздух, чтобы, дойдя по инерции до точки минимума, ГПАП имела нулевую плавучесть, а в следующий момент уже положительную и начала подниматься по восходящему участку.
В точке локального максимума – когда ГПАП совершила подъем по восходящему участку трассы, на каком-то расчетном верхнем участке восходящей система должна начать спускать воздух, чтобы, дойдя по инерции до точки максимума, ГПАП опять приобрела нулевую плавучесть, а в следующий момент уже отрицательную и начала опускаться по нисходящему участку.
Количество циклов, а, соответственно, и максимально пройденный путь зависит от количества и давления воздуха, накаченного в резервуар, а также от глубины погружения и массы заполненной ГПАП. Чем больше глубина погружения, тем больше на одном цикле можно переместиться в горизонтальном направлении.
Особенностью такого способа перемещения может являться и то, что движение грузов, перемещающихся на ГПАП по направляющим возможно за счет управления плавучестью.
Таким образом, способ подводного перемещения грузов, посредством изменения плавучести, при котором груз перемещается на грузовой понтонной автоматизированной платформе, снабженной резервуаром со сжатым воздухом и эластичными мешками, по чередующимся восходящим и нисходящим участкам транспортировочной трассы посредством повышения плавучести нагнетанием воздуха в эластичные мешки для прохождения восходящих участков и понижения плавучести спусканием воздуха из эластичных мешков для прохождения нисходящих участков трассы, является простым, не требующим использования энергозависимых движителей и сложных систем управления.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВОЛНОСТОЙКАЯ МОРСКАЯ ГРУЗОПОДЪЁМНАЯ ПЛАТФОРМА (ВМГП) | 2014 |
|
RU2561491C1 |
| ПОДВОДНЫЙ ТРАСПОРТНЫЙ КОМПЛЕКС | 2007 |
|
RU2356779C2 |
| ПЛАВАЮЩИЙ КОРПУС ДЛЯ ПРОИЗВОДСТВА ПОДВОДНО-ТЕХНИЧЕСКИХ РАБОТ | 1998 |
|
RU2149790C1 |
| УСТРОЙСТВО ДЛЯ ИЗВЛЕЧЕНИЯ ОБСАДНЫХ ТРУБ | 1979 |
|
SU825769A1 |
| ВОЛНОВАЯ И ПРИЛИВНАЯ ЭНЕРГЕТИЧЕСКАЯ УСТАНОВКА | 2013 |
|
RU2545112C2 |
| СПОСОБ ОСУЩЕСТВЛЕНИЯ ПОДЪЕМНО-ТРАНСПОРТНОЙ ОПЕРАЦИИ И ПОДВОДНОЕ СУДНО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2478517C2 |
| Способ добычи железомарганцевых конкреций со дна океана с глубин до 5 км и более и устройство для его осуществления | 2019 |
|
RU2715108C1 |
| КОМПЛЕКС ДЛЯ ПОДЪЕМА ЗАТОНУВШЕГО СУДНА | 2001 |
|
RU2246421C2 |
| КОМПЛЕКС ДЛЯ РАЗРАБОТКИ ПОДВОДНЫХ МЕСТОРОЖДЕНИЙ ПОЛЕЗНЫХ ИСКОПАЕМЫХ | 2006 |
|
RU2349489C2 |
| СУДНО-ТРУБОУКЛАДЧИК И СПОСОБ ПРОКЛАДКИ ТРУБОПРОВОДОВ | 1999 |
|
RU2229053C2 |
Изобретение относится к подводному перемещению грузов. Способ подводного перемещения грузов, посредством изменения плавучести, включает перемещение груза на грузовой понтонной автоматизированной платформе, по чередующимся восходящим и нисходящим участкам транспортировочной трассы. Платформа снабжена резервуаром со сжатым воздухом и эластичными мешками. Груз перемещают посредством повышения и понижения плавучести. Для прохождения восходящих участков повышают плавучесть, нагнетая воздух в эластичные мешки. Для прохождения нисходящих участков трассы понижают плавучесть, спуская воздух из эластичных мешков. Достигается упрощение способа подводного перемещения грузов. 4 ил.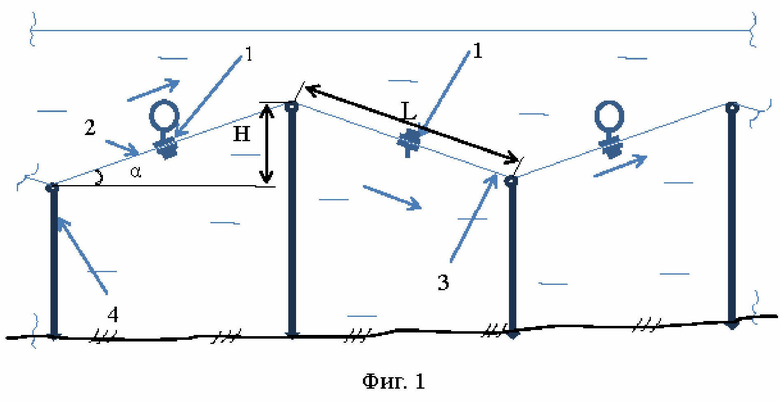
Способ подводного перемещения грузов посредством изменения плавучести, отличающийся тем, что груз перемещается на грузовой понтонной автоматизированной платформе, снабженной резервуаром со сжатым воздухом и эластичными мешками, по чередующимся восходящим и нисходящим участкам транспортировочной трассы посредством повышения плавучести нагнетанием воздуха в эластичные мешки для прохождения восходящих участков и понижения плавучести спусканием воздуха из эластичных мешков для прохождения нисходящих участков трассы.
| СПОСОБ ТРАНСПОРТИРОВКИ НЕГАБАРИТНЫХ ПОДВОДНЫХ ОБЪЕКТОВ И КОМПЛЕКС ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2011 |
|
RU2500569C2 |
| Устройство и способ доставки грузов | 2019 |
|
RU2735796C1 |
| Шторный регулятор светового потока | 1973 |
|
SU489093A1 |
| РАСШИРИТЕЛЬ СКВАЖИН | 2005 |
|
RU2299968C1 |
| Микрохолодильник | 1983 |
|
SU1134861A1 |

