ОБЛАСТЬ ТЕХНИКИ.
Группа изобретений относится к средствам для управления движением группы беспилотных морских подвижных объектов, предназначенных для проводки (эскортирование, раскантовка) швартовки грузового судна к перегрузочному терминалу и отшвартовки от него, в пределах заданной водной акватории.
УРОВЕНЬ ТЕХНИКИ.
С быстрым развитием робототехники, коммуникационных, компьютерных и навигационных технологий беспилотные морские подвижные объекты начинают постепенно использоваться в мониторинге морской среды, поиске и спасании при морских авариях, организации морского движения в узком бассейне, оказании помощи в эскортировании морских подвижных объектов, ближней и дальней идентификации целей и т.д. В настоящее время беспилотные суда разрабатываются более чем в 10 странах, включая Россию, США, Великобританию, Норвегию, Канаду, Израиль и Японию.
Исследования беспилотного управления движением судов включают в себя:
1. Исследования по планированию траектории движения судна основанные, главным образом, на гидрометеорологической информации о состоянии морской среды в реальном масштабе времени (обычно на основе электронных карт). Решение - численное моделирование онлайновых полей ветра, течения и волны в заданной морской акватории с использованием результатов дистанционного зондирования Земли, а также результатов локальных измерений гидрометеорологических параметров. Крупномасштабное автономное планирование пути судна основывается на информации о навигационных опасностях - опасные цели, изобаты, мели, банки и т.д.
2. Исследования методов интеллектуальной и/или онлайновой поддержки для предотвращения столкновений основаны на маломасштабном онлайн-динамическом планировании траектории на основе автономной навигационной системы, состоящей из оптической системы анализа ближней зоны (примерно 12 миль от корпуса судна), радарной системы и автоматической идентификационной системы АИС.
3. Создание канала передачи данных и исследование методов управления движением.
Развитие автономного судовождения и концепции «умного порта» требуют соответствующих цифровых технологий проводки судна и швартовки. Уровень техники представлен отечественными и зарубежными патентами.
Известен по патенту РФ на изобретение №2501708 «Способ автоматической проводки судна», МПК В63Н 25/00, опубл. 20.12.13 г.
Способ включает измерение параметров движения и угловой скорости, их последующее сравнение с программными значениями данных параметров движения и формирование управляющего сигнала на рулевой привод в функции данных рассогласований и скорости судна.
Известен по патенту РФ на изобретение №2410282 «Авторулевой судна», МПК В63В 49/00, опубл. 27.01.2011 г.
Устройство содержит приемоиндикатор спутниковых навигационных систем, электронную картографическую навигационно-информационную систему, авторулевой, гирокомпас, рулевую машину. В состав устройства дополнительно введен адаптивный вычислитель бокового отклонения судна от заданной траектории движения. Достигается автоматизированное определение и учет допустимого бокового отклонения судна от заданной траектории.
Известен по патенту РФ на изобретение №2535777 «Система идентификации гидродинамических коэффициентов математической модели движения судна», В63Н 25/04, G06G 7/70, опубл. 20.12.2014
Изобретение относится к области автоматического управления движением судов. Система идентификации гидродинамических коэффициентов математической модели движения судна содержит рулевой привод, датчики: угловой скорости, курса судна, угла перекладки руля, боковой скорости, скорости хода судна, углового ускорения и бокового ускорения, блок задания маневра идентификации, два блока суммирования, блок памяти, блок сравнения, десять сумматоров и десять множителей.
Известны патенты, описывающие способы автоматической швартовки судна.
Патент РФ №2757696 «Способ швартовки судна и автоматизированное швартовое устройство», МПК В63В 22/02, В63В 21/00. Опубл. 20.10.2021. Патент РФ №2743239 «Способ транспортировки крупного айсберга» МПК В63В 21/56, В63В 21/00. Опубл. 16.02. 2021 Патент РФ №2613465 «Способ швартовки судна с помощью лазерной системы» МПК В63В 21/00, G01S 17/87, G08G 3/00. Опубл. 16.03.2017
Недостатком этих аналогов является то, что в них не решается задача проводки судна в условиях «узкого бассейна», а швартовка осуществляется с помощью швартовочных тросов или канатов, что усложняет процесс швартовки.
Известны патенты, описывающие управление проводкой судна с помощью «стаи» беспилотных аппаратов.
Известен «Способ мониторинга окружающей среды и беспилотный аппарат для использования в данном способе» по патенту РФ №2645249, опубл. 19.02.2018, МПК G01W 1/08.
Предлагаемая группа изобретений относится к средствам мониторинга, а именно к мультиагентным (роевым) системам наблюдения и контроля за окружающей средой. Узлы децентрализованной сети взаимодействуют между собой на основе алгоритма роевой самоорганизации, что позволяет сформировать на
практике стая беспилотных подвижных аппаратов (роботов),
используемых для наблюдения окружающей среды с помощью любого типа транспортных средств.
Известна «Программно-управляемая гидроакустическая ЦАФАР на базе "стаи" морских микродронов» по патенту РФ №2684664, опубл. 11.04.2019, МПК G01S 15/02.
Программно-управляемая гидроакустическая ЦАФАР на базе "стаи" морских микродронов реализована в форме распределенных компонентов единой системы и каждый микродрон, управляемый бортовым микроконтроллером, в строго определенные моменты времени выдает или принимает импульсные сигналы при помощи магнитогидродинамического излучателя гидроакустических колебаний. Причем моменты передачи или приема для каждого микродрона в зависимости от его подводных координат индивидуально подбираются управляющим командным микродроном таким образом, что только в определенной точке сканируемого пространства сигналы будут синхронизированы для пеленгации объекта, причем уровень облучающих сигналов будет меньше уровня природных акустических помех и не позволит провести обнаружение как самого факта пеленгации, так и обнаружить местоположение микродронов. Технический результат заключается в возможности скрытной пеленгации надводных и подводных объектов по результатам обработки информации от ЦАФАР «стаи» морских микродронов.
Известна разработка группы мобильных аппаратов по патенту РФ №2706748 «Трехсредный мобильный аппарат "Этажерка", опубл. 20.11.2019, МПК B60F 5/02.
Изобретение относится к трехсредным мобильным аппаратам, преимущественно роботам (дронам) с автоматическим, полуавтоматическим и ручным дистанционным управлением по радиоканалу с возможным локальным дублированием по гидроакустическому каналу) научно-исследовательского, военного, специального или гражданского назначений.
Особенность такой мультиагентной системы - «стая» роботов - аппарат как совокупность удаляемых на расстояние или обратимо отделяемых полностью модулей при минимальном для множественности их количестве «три».
Известен патент КНР CN 108415418 А «Способ формирования однородного кластера беспилотных лодок на основе неориентированной связной сети».
Изобретение относится к технической области морской техники беспилотных катеров, в частности к способу формирования однородного кластера беспилотных катеров на основе неориентированной связанной сети.
Поведение стаи - это коллективное поведение организмов. Наиболее типичный пример - группы рыб, собирающиеся кругами или плавающие в определенном направлении. Вдохновленные биологическими кластерами, исследователи начали изучать технологию кластеров беспилотных лодок.
Целью этого изобретения является обеспечение однородного способа формирования кластеров беспилотных лодок на основе неориентированной связанной сети с целью преодоления вышеупомянутых дефектов уровня техники.
Известен патент КНР CN 110390431 А «Поисково-спасательная сеть на базе беспилотного оборудования алгоритм разведки стаей и метод его диспетчеризации». Изобретение относится к способу поиска и спасения на море, а более конкретно - к поисково-спасательной сети, основанной на алгоритме разведки Роем беспилотного оборудования и способе его планирования.
Целью этого изобретения является создание поисково-спасательной сети на основе беспилотного оборудования «swarm intelligence algorithm)) и метода его планирования. Создавая иерархическую систему управления сетью, состоящую из нескольких агентов, в полной мере используя интеллект, независимые вычислительные и принимающие решения возможности алгоритмов и агентов создают новое быстрое поисково-спасательное решение.
Известен патент Кореи KR 20140079746 А «Высокоскоростное водное судно и водолазное транспортное средство (высокоскоростное надводное судно и погружное транспортное средство))).
Данное изобретение относится в основном к морскому судну и, в частности, к быстроходному штурмовому и разведывательному судну.
На данный момент тактике "Стаи малых лодок", описанной выше, лучше всего противостоят быстрые, такого же размера, очень маневренные и хорошо вооруженные наступательные корабли, которые могут быть достигнуты по периметру линии обороны на безопасном расстоянии от боевых сил флота. Считается, что так оно и есть. С этой целью уже развернут должным образом оборудованный корабль типа "Зодиак".
Известен блок патентов США, касающихся устройства управления группой воздушных судов (вертолетов и самолетов с вертикальным взлетом и посадкой) и способа вычисления путевых точек при транспортировке ими общего груза на внешней подвеске, распространяющийся и на морские безэкипажные суда: патенты США №8370003, №8761968 и №9043052.
Способ управления включает в себя использование пилотной станции, для прокладки маршрута полезной нагрузки к заданному месту назначения. При этом текущая путевая точка полезной нагрузки соединяется линией с заданным местом назначения полезной нагрузки и на этой линии, путем расчета с использованием сплайнов, находится следующая путевая точка полезной нагрузки, исходя из значения которой, задаются новые путевые точки для каждого безэкипажного воздушного судна стаи, перемещение в которые воздушных судов должно привести к перемещению полезной нагрузки в расчетную путевую точку. Затем цикл повторяется для новой расчетной путевой точки полезной нагрузки вплоть до достижения намеченного места назначения.
Дополнительный к данному патенту патент США №8761968 (заявка 13/750,384 от 25.01.2013) с тем же названием «Система и способ для нескольких воздушных судов, поднимающих общую полезную нагрузку» защищает уже не «систему и способ управления несколькими безэкипажными воздушными судами», а «вычисляющую систему для управления стаей безэкипажных воздушных судов, перемещающих общую полезную нагрузку», однако содержание патента повторяет первый, добавляя несколько новых зависимых пунктов.
Патент США №9043052 «Система и способ для нескольких транспортных средств, перемещающих общую полезную нагрузку» (заявка №14/287,405 от 27.05. 2014) является дополнительным к предыдущему, использует ту же схемотехнику структурных блоков и способ управления стаей, но распространяет его действие не только на безэкипажные воздушные суда с вертикальным взлетом и посадкой, в том числе вертолеты, дирижабли и дроны, но и на наземный транспорт всех видов, космические корабли и аппараты, включая спутники, микроспутники, наноспутники, пилотируемые космические аппараты, беспилотные космические аппараты, космические самолеты, космические челноки, космические капсулы и космические станции. Также действие патента широко распространяется на морской транспорт, включая суда всех типов: корабли, суда на морской подушке, подводные лодки, перемещаемые подводные объекты и другие.
Отдельно указаны буксиры, полезной нагрузкой которых могут быть нефтяная вышка, другое судно, баржа, сеть для управления подводной лодкой, подводная лодка. В этом варианте используются буксиры заводского изготовления, которые имеют контроллер и приводы, например, руль, винты, водоструйные двигатели, паруса, имеются датчики скорости, радар, GPS, датчики ветра, гироскопы, акселерометры и др.
При этом ранее сделана оговорка, что данная система и способ пригодны только для перемещения объекта на протяженное расстояние. То есть, этот способ непригоден для швартовных работ в порту и раскантовки сопровождаемых судов, но имеются и другие ограничения его применимости в морских условиях. Возможности применения данного способа для стаи морских буксиров могут быть реализованы только как дополнительные при буксировке в открытом море.
Известна патентная публикация США US 20160223336 А1, от 4 августа 2016 года (заявка РСТ от 3 сентября 2014 года) «Интерактивная система дистанционного наведения для морских судов», касающаяся точного позиционирования морских судов относительно морского дна.
Система состоит из нескольких компьютерных устройств, в которую может быть занесена геодезическая карта рельефа морского дна нужного географического района и позволяет пользователям получать инструкции для точного позиционирования при постановке на якорь и швартовных операциях, относительно фиксированных объектов на дне.
Известен патент КНР CN 106094606 А «Навигационная управляющая платформа с дистанционным управлением для безэкипажного судна» (заявка от 19.05.2016)
Изобретение относится к технической области управления беспилотным катером, в частности к надводной беспилотной лодочной навигационно-управляющей телеоперационной платформе.
Целью этого изобретения является создание навигационно управляющей телеоперационной платформы для надводного беспилотного катера для решения задач, поставленных в фоновом уровне техники.
В этом изобретении предусмотрены следующие технические решения: надводная беспилотная катерная навигационно-управляющая телеоперационная платформа, включающая навигационную радиолокационную станцию, автоматическую систему идентификации, курсовую и позиционную систему отсчета, датчик скорости и угла поворота руля, модуль управления рулем направления движения транспортного средства, бортовой компьютер технического управления катером и береговой компьютер базы управления катером, береговой компьютер управления катером и бортовой компьютер технического управления двунаправленно соединены по протоколу TCP/IP или UDP, а навигационный радар и автоматическая идентификационная система соединены с береговым модулем через соединение RS422/485 управляющего компьютера катера, автоматическая идентификационная система, система отсчета курса и ориентации, датчик скорости и угла поворота руля соответственно соединены с бортовым промышленным управляющим компьютером, а бортовой промышленный управляющий компьютер соединен с датчиком скорости и угла поворота руля через модуль управления рулем, береговой управляющий компьютер также соединен с основанными на сопротивлении скольжению судовыми часами и датчиком порядка поворота руля, а также с модулем отображения скорости и угла поворота руля.
Предпочтительно, чтобы управляющий компьютер берегового базирования/материнского судна включал в себя модуль проектирования маршрута электронной карты, модуль слияния траектории цели радиолокационной и автоматической идентификационной системы, модуль оценки риска столкновения, план опытной эксплуатации и модуль оценки пределов границ, алгоритм управления и модуль инструкции манипулирования, а также модуль сбора и отображения параметров нагрузки катера, причем модуль проектирования маршрута электронной карты соединен, в свою очередь, с модулем слияния траектории цели радиолокационной и автоматической идентификационной системы, модулем оценки риска столкновения, модуль инструкции алгоритма управления и манипуляции, модуль инструкции алгоритма и управления двунаправленно соединен с бортовым модулем приема и дисплея параметра.
Недостатком этого изобретения является то, что оно не обеспечивает возможность буксировки, раскантовки и швартовки сопровождаемого грузового судна, например, танкера к перегрузочному терминалу.
Приведенные выше принципы управления несколькими аппаратами для воздействия с объектами или взаимодействия для выполнения определенных задач применяются в рамках различных типов транспортных средств. Однако, перечисленные технические решения, реализующие эти принципы, не отвечают тем задачам, которые поставили авторы предлагаемого изобретения.
ТЕХНИЧЕСКАЯ ЗАДАЧА.
Технической задачей предлагаемой группы изобретений является разработка комплекса специальных технических средств, обеспечивающих заход/выход грузового судна, оснащенного стандартным комплектом навигационных средств, в морской порт в автономном режиме, при этом необходимым и достаточным является доставка лоцманом специального носимого оборудования на борт грузового судна, когда оно находится в зоне точки высадки лоцмана.
ТЕХНИЧЕСКИЙ РЕЗУЛЬТАТ.
Технический результат группы изобретений выражен в повышении быстродействия изменения (коррекции) курса грузового эскортируемого судна автономными судами-буксирами, высокоточном позиционировании грузового эскортируемого судна в пространстве водной портовой акватории и относительно грузового терминала, предотвращении наваливания грузового судна на терминал, снижении радиуса раскантовки судна буксирами в условиях интенсивного движения судов в портовой акватории в сложных стесненных навигационных условиях.
Предложенные способы проводки, швартовки и отшвартовки морского грузового эскортируемого судна в автономном режиме обеспечивают возможность высокоточного позиционирования, как при работе с грузовыми судами стационарно оснащенными автономным навигационным оборудованием, так и с судами, использующими навигационные переносные лоцманские комплекты, и осуществляется под действием цифровой инструментальной платформы управления движением группы автономных судов в портовой акватории.
Одновременно решаются также задачи по существенному снижению себестоимости провозки грузов, снижению времени провозки грузов, уменьшению рисков провозки за счет оптимизации процессов проводки и швартовки грузового судна к грузовому терминалу.
Решение поставленной задачи в виде внедрения режима автономного судовождения в портовой акватории и достигается совокупностью всех признаков, указанных в двух независимых пунктах формулы изобретения.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ.
Сущность изобретения заключается в использовании группы азимутальных буксиров-автоматов, которые частично в автономном и частично в дистанционном режимах управления, выполняют весь комплекс морских операций по организации захода/выхода обычного грузового судна в порт: эскорт, раскантовка, швартовка, отшвартовка, при этом полностью контролируя весь процесс движения грузового судна в портовой акватории.
Заявляемые признаки обеспечивают следующее.
Группа автономных судов-буксиров во взаимодействии с грузовым эскортируемым судном образует жесткие связи, создает единый комплекс - грузовое эскортируемое судно - автономные суда-буксиры, находящийся под управлением внешнего - берегового капитана. Внешний капитан на берегу ведет всю группу в дистанционном режиме и подводит весь единый комплекс к причалу. Автономные суда-буксиры выполняют роль подруливающих устройств, так как имеют возможность стыковаться с использованием магнитов к корпусу судна, при этом значительно увеличивается маневренность грузового судна в стесненных условиях, особенно при малых скоростях. Обеспечивается точная проводка, а затем швартовка грузового судна и отшвартовка от причала, отпадает необходимость использования гибких швартовных канатов, уменьшается радиус раскантовки судна. При этом обеспечивается возможность работы группы буксиров-автоматов в автономном режиме, т.е. без участия человека.
Совокупность признаков, характеризующих устройство цифровой инструментальной платформы управления движением группы автономных судов-буксиров, обеспечивает следующее.
Использование цифровой навигационно-управляющей инструментальной платформы позволит снизить влияние человеческого фактора на возникновение аварийных ситуаций в портовой акватории, что приведет к упорядочиванию судозахода в порт, уменьшит уровень неопределенности (риска) захода судна в прибрежную (портовую) зону и, соответственно, приведет к росту грузооборота порта.
Использование дополнительной системы вспомогательных модулей, выполняющих информационные и вычислительные функции, позволяет уменьшить время перерасчета и передачи координат путевых точек, задаваемых платформой, каждому автономному судну-буксиру с учетом оптических и радиолокационных сигналов от навигационного оборудования в гавани и особенностей фарватера. Тем самым обеспечивается повышение маневренности грузового эскортируемого судна в узком водном бассейне, что очень важно для большинства современных морских портов.
Средства высокоточного позиционирования с учетом данных спутниковых систем навигации позволяют следить за позиционированием судна относительно причала и тем самым избежать навала судна на причал.
Система вспомогательных модулей вместе с системой высокоточного позиционирования позволяют рассчитать положения автономных судов-буксиров для обеспечения минимального радиуса раскантовки грузового эскортируемого судна.
Сущность изобретения поясняется графическими материалами, на которых даны:
Фиг. 1 - Схема взаимодействия группы автономных судов-буксиров при сопровождении грузового эскортируемого судна
Фиг. 2 - Взаимодействие автономных судов-буксиров при отшвартовке грузового судна
Фиг. 3 - Движение грузового судна к кругу разворота
Фиг. 4 - Раскантовка грузового судна на круге разворота
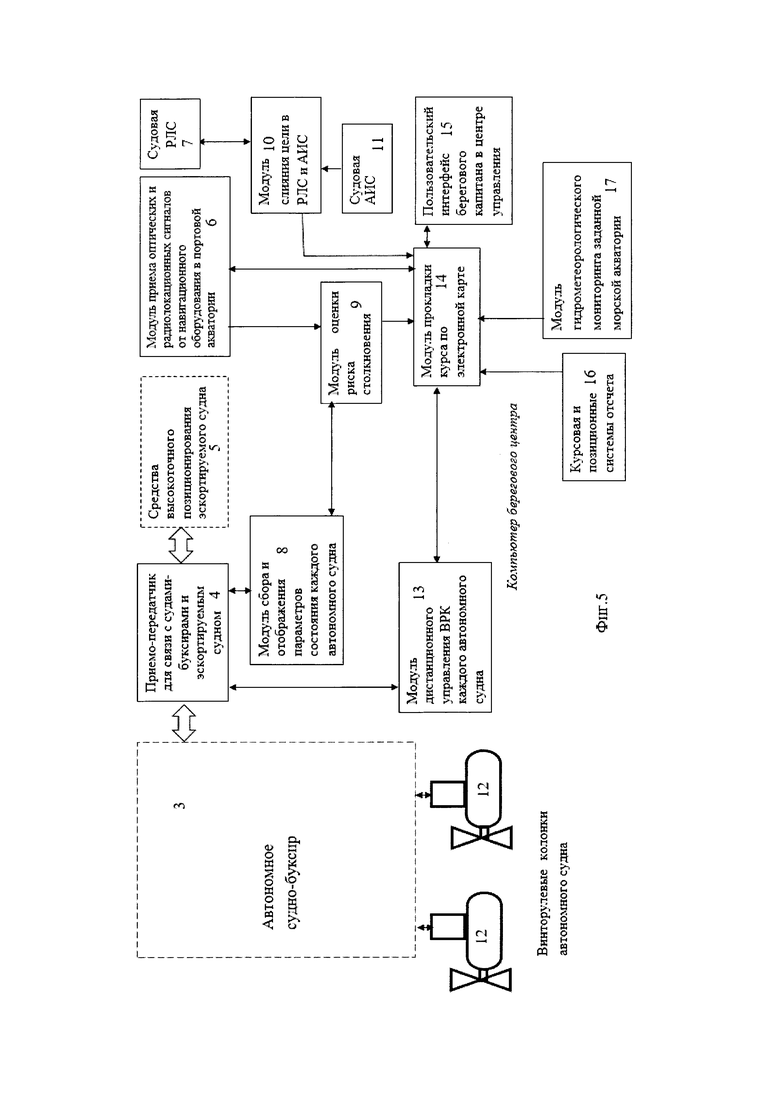
Фиг. 5 - Схема цифровой инструментальной платформы управления движением группы автономных судов-буксиров в портовой акватории.
На которых показаны:
1 - Береговой пост дистанционного управления автономными судами-буксирами
2 - Грузовое морское судно
3 - Автономное судно-буксир
4 - Приемо-передатчик для связи с судами-буксирами, грузовым судном и постом дистанционного управления движением
5 - Средства высокоточного позиционирования эскортируемого судна
6 - Модуль приема оптических и радиолокационных сигналов от навигационного оборудования в портовой акватории
7 - Судовая радиолокационная станция
8 - Модуль сбора и отображения параметров состояния каждого автономного судна
9 - Модуль оценки риска столкновения
10 - Модуль слияния РЛС и АИС цели на электронной карте
11 - Судовая автоматическая идентификационная система
12 - Винторулевые колонки судов-буксиров
13 - Модуль дистанционного управления винторулевыми колонками каждого автономного судна-буксира
14 - Модуль прокладки курса по электронной карте
15 - Пользовательский интерфейс оператора берегового центра управления
16 - Курсовая и позиционные системы отсчета
17 - Модуль гидрометеорологического мониторинга заданной морской акватории
В качестве автономных судов-буксиров используются инновационные азимутальные буксиры-автоматы с расположением винторулевых колонок на корме и баке в диаметральной плоскости судна, плоским килем и идентичными кормовыми и баковыми частями. Суда-буксиры оборудованы стандартным, для автономных судов, комплектом навигационного и оптического оборудования.
РАБОТА СПОСОБОВ по п.п. 1, 2, 3 формулы изобретения
СПОСОБ ПО ПУНКТУ 1 «Способ проводки морского грузового судна в автономном режиме» включает следующие этапы:
- этап движения автономных судов-буксиров к месту рандеву с грузовым судном, выполняемый в автономном режиме, при котором грузовое судно следует к разворотному кругу с помощью собственных средств управления (Фиг. 1, позиция 1). Производится расчет координат управления движителями судов-буксиров автономными навигационными системами, расположенными на каждом автономном судне-буксире группы и в береговом центре управления. Осуществляют анализ состояния ближней зоны с помощью оптических систем, установленных на каждом автономном судне-буксире, с экранным воспроизведением, рассчитывают команды для каждого буксира. Пакет команд дистанционно передают из берегового центра управления, соответствующие команды поступают на каждое автономное судно-буксир группы в зависимости от его конкретного назначения и текущего положения. По достижении контура вокруг судна, буксиры распределяются по точкам стыковки к судну (позиция 2)
СПОСОБ ПО ПУНКТУ 2 «Способ швартовки морского грузового судна в автономном режиме» включает следующие этапы:
- этап стыковки судов-буксиров с судном в автономном режиме (позиция 3), при этом судно движется к разворотному кругу раскантовки с помощью своих средств движения и управления, буксиры-автоматы при этом обеспечивают функцию подруливающих устройств;
- этап раскантовки, (позиция 4) при котором судно полностью гасит продольную скорость в пределах разворотного круга с помощью главного двигателя за счет команд берегового капитана, которые передаются на борт грузового судна с помощью специального оборудования, суда-буксиры, под управлением берегового капитана, компенсируют дрейф грузового судна и осуществляют раскантовку судна в пределах разворотного круга ориентируя диаметральную плоскость судна в направлении к причалу,
- этап сближения с причалом (позиция 5), под руководством берегового капитана, при котором судно движется с помощью главного двигателя по линии параллельной причалу, суда-буксиры компенсируют дрейф судна, его угловую скорость, удерживают курс судна,
- этап прижима грузового судна к причалу (позиция 6), при котором грузовое судно полностью гасит продольную скорость при помощи главного двигателя, суда-буксиры, под управлением берегового капитана, удерживают судно параллельно причалу, а два судна-буксира с швартуемого борта переходят на противоположный и стыкуются с ним, осуществляют прижим судна к причалу, после выполнения швартовки суда-буксиры в автономном режиме возвращаются к месту стоянки,
- этап возвращения судов-буксиров к месту стоянки.
СПОСОБ ПО ПУНКТУ 3 «Способ отшвартовки морского грузового судна в автономном режиме»
После выполнения погрузо-разгрузочных работ, осуществляют отшвартовку грузового судна от причала. При отшвартовке от причала грузового судна, по команде берегового капитана, автономные суда-буксиры направляются к борту грузового судна, противоположному швартовочному, при этом автономные суда-буксиры разворачиваются перпендикулярно носом к борту грузового судна и жесткое сцепление производят только одним поворотным швартовочным устройством с механизмом жесткого сцепления, причем, автономные суда-буксиры осуществляют как отвод грузового эскортируемого судна от причала, так и его прижим (Фиг. 2), автономные суда-буксиры, осуществляющие отвод грузового судна, располагают у крайних точек вдоль бортовой линии грузового эскортируемого судна, а осуществляющие прижим автономные суда-буксиры, располагают в середине бортовой линии, и производят прижим грузового судна в противоположном отводу направлении для придания ему оптимального положения при совершении маневра с учетом действия ветра и течения, при этом, выполняют отвод грузового судна с силой, превышающей силу, с которой выполняют прижим.
На следующем этапе суда-буксиры производят сцепление с грузовым судном по обоим бортам, грузовое судно начинает движение вперед при помощи главного двигателя (Фиг. 3), по линии параллельной причалу, суда-буксиры компенсируют дрейф судна, его угловую скорость, удерживают курс судна, под руководством берегового капитана, вплоть до достижения разворотного круга (Фиг. 4), где судно полностью гасит продольную скорость в пределах разворотного круга с помощью главного двигателя, суда-буксиры, под управлением берегового капитана, компенсируют дрейф грузового судна и осуществляют раскантовку судна в пределах разворотного круга ориентируя диаметральную плоскость судна в направлении к выходу из порта.
Автономные суда-буксиры сопровождают грузовое судна после выхода из порта в автономном режиме до границы района обязательной лоцманской проводки после чего производят отстыковку с судном и возвращаются к месту стоянки.
РАБОТА УСТРОЙСТВА ПО ПУНКТУ 4 «Цифровая инструментальная платформа управления движением группы автономных судов в портовой акватории».
При получении команды на начало захода грузового судна в порт, береговой капитан (Фиг. 2, позиция 15) из пользовательского интерфейса берегового центра управления автономными судами-буксирами задает место назначения, к которому должно быть доставлено эскортируемое судно и причал, к которому оно должно быть пришвартовано, а также время выполнения операции. Эти данные поступают на модуль прокладки курса по электронной карте 14. Данный модуль прокладывает курс для грузового эскортируемого судна и задает путевые точки с учетом информации о гидрометеорологической обстановке, поступающей от модуля автоматической системы гидрометеорологического мониторинга заданной морской акватории 17, информации о расположении и направлениях движения других судов в районе акватории и оценки риска столкновения с ними, поступающей от модуля слияния 10 автоматической идентификационной системы 9 и радиолокационной станции 7, связанного с модулем курсовой и позиционной системы отсчета 16. Информация о проложенном курсе эскортируемого судна поступает на модуль дистанционного управления ВРК 13 каждого автономного судна.
Одновременно, приемопередатчик 4, получает информацию от бортовых контроллеров каждого автономного судна-буксира о его состоянии (направлении движения, скорости, ускорении) и месте нахождения, которая также поступает на пульт оператора берегового центра 15 через модуль сбора и отражения параметров каждого автономного судна-буксира 8. В модуле прокладки курса по электронной карте 14 для каждого из автономных судов-буксиров определяется новая путевая точка, задается скорость и курсовой угол. Эти данные поступают на модуль дистанционного управления винторулевыми колонками каждого автономного судна-буксира 13 и далее поступают на автономные суда-буксиры 3. На каждом судне-буксире эта информация поступает на модуль сбора и отражения параметров состояния автономного судна-буксира, который также выполняет функции контроля за положением автономного судна-буксира, отмечая в заданное время расхождение между заданными координатами путевых точек и реальным положением автономного судна-буксира.
При движении автономного судна-буксира и грузового судна и достижении времени контроля фиксируется конкретное положение автономного судна-буксира, на основе этих данных высчитывается позиция грузового эскортируемого судна, которая сверяется с данными, полученными от портовой Системы Управления Движением Судов.
Запускается новый цикл расчетов. Снова прокладывается курс грузового эскортируемого судна в модуле прокладки курса по электронной карте и через вышеуказанные промежуточные модули информация поступает на модуль прокладки курса по электронной карте. Для расчета новой путевой точки грузового эскортируемого судна измеряется разница между текущей путевой точкой и той, которая планировалась и на линии нового курса отмечается новое значение путевой точки с корректурой на основе интерполяции значений текущей и планируемой раньше путевой точкой. Исходя из значения новой путевой точки грузового эскортируемого судна рассчитываются новые путевые точки автономных судов-буксиров.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ БУКСИРА ПОРТОВОГО ФЛОТА В РЕЖИМЕ ДИСТАНЦИОННОГО ПИЛОТИРОВАНИЯ | 2022 |
|
RU2794384C1 |
| Способ высокоточного определения навигационных элементов движения судна | 2016 |
|
RU2643072C2 |
| Способ управления координированной групповой деятельностью буксиров-автоматов | 2023 |
|
RU2823051C1 |
| ШВАРТОВНЫЙ ЗАХВАТНЫЙ МОДУЛЬ (варианты) | 2023 |
|
RU2808875C1 |
| Способ управления поперечным и продольным движением судна относительно морского грузового терминала | 2024 |
|
RU2834495C1 |
| БЕРЕГОВОЙ ШВАРТОВНЫЙ КОМПЛЕКС, БЕРЕГОВОЙ ОПОРНЫЙ ШВАРТОВНЫЙ МОДУЛЬ (ВАРИАНТЫ), УНИВЕРСАЛЬНАЯ МАГНИТНАЯ ЗАХВАТНАЯ СЕКЦИЯ (ВАРИАНТЫ), МАГНИТНАЯ ЯЧЕЙКА | 2024 |
|
RU2834110C1 |
| НАВИГАЦИОННЫЙ ИСПЫТАТЕЛЬНЫЙ КОМПЛЕКС | 2024 |
|
RU2828932C1 |
| СПОСОБ ПРОВОДКИ БЕСПИЛОТНОГО ГИДРОСАМОЛЁТА НА АКВАТОРИИ ЛЁТНОГО БАССЕЙНА | 2018 |
|
RU2705475C1 |
| УСТРОЙСТВО ДЛЯ СТОЯНКИ СУДОВ В КАМЕРЕ ШЛЮЗА | 2024 |
|
RU2822933C1 |
| СПОСОБ ШВАРТОВКИ СУДНА С ПОМОЩЬЮ ЛАЗЕРНОЙ СИСТЕМЫ | 2015 |
|
RU2613465C1 |
Группа изобретений относится к средствам для управления движением группы беспилотных морских подвижных объектов, предназначенных для проводки, швартовки грузового судна к перегрузочному терминалу и отшвартовки от него, в пределах заданной водной акватории. Проводку, швартовку и отшвартовку выполняют с помощью группы автономных азимутальных судов-буксиров, управляемых дистанционно удаленным капитаном и посредством цифровой инструментальной платформы. К грузовому эскортируемому судну направляют группу из четного числа автономных судов-буксиров, каждое из которых оснащено двумя азимутальными винторулевыми колонками и двумя поворотными швартовочными устройствами с магнитными механизмами жесткого сцепления автономных судов-буксиров с корпусом грузового эскортируемого судна. Вычисляют координаты управления движением. Производят анализ ближней зоны с помощью автоматических оптических систем. Формируют команды управления. Повышается быстродействие изменения курса судна, обеспечивается высокоточное позиционирование судна, предотвращается наваливание судна на терминал. 4 н.п. ф-лы, 5 ил.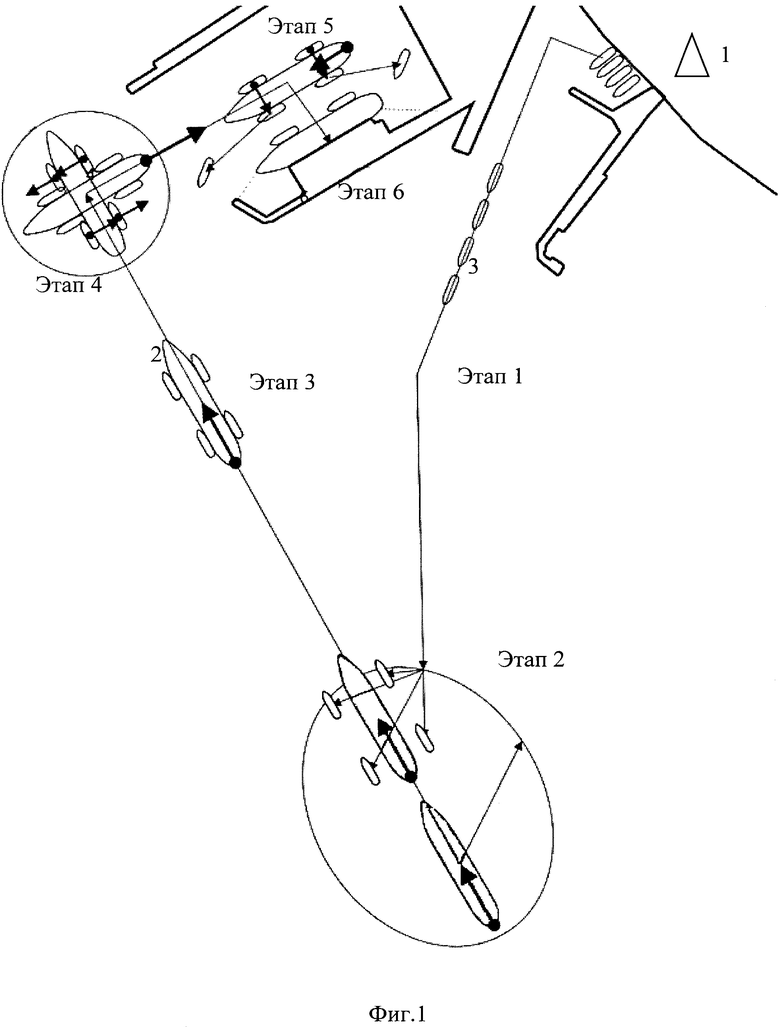
1. Способ проводки морского грузового судна в автономном режиме, заключающийся в том, что
проводку выполняют в портовой акватории с помощью группы автономных азимутальных судов-буксиров, управляемых дистанционно удаленным капитаном и посредством цифровой инструментальной платформы,
для чего к грузовому эскортируемому судну направляют группу из четного числа автономных судов-буксиров, каждое из которых оснащено двумя азимутальными винторулевыми колонками и двумя поворотными швартовочными устройствами с магнитными механизмами жесткого сцепления автономных судов-буксиров с корпусом грузового эскортируемого судна, действие которых обеспечивает возможность автономным судам-буксирам совершать маневры как при движении лагом, так и при развороте,
вычисляют координаты управления движением автономных судов-буксиров по данным автономных навигационных систем, расположенных на автономных судах-буксирах группы и в береговом дистанционном центре управления,
производят анализ ближней зоны с помощью автоматических оптических систем, установленных на каждом автономном судне-буксире, с экранным воспроизведением,
формируют команды управления в береговом дистанционном центре управления для каждого автономного судна-буксира,
направляют пакет команд дистанционно из берегового центра управления, которые передаются на каждое судно группы автономных судов-буксиров соответственно, в зависимости от его конкретного назначения и текущего положения,
для осуществления проводки грузового эскортируемого судна к причалу автономные суда-буксиры направляют к каждому борту грузового эскортируемого судна по одному, два или три буксира в зависимости от дедвейта грузового эскортируемого судна, которые согласно команде располагаются вплотную параллельно бортами к бортам грузового эскортируемого судна,
производят жесткое сцепление автономных судов-буксиров с бортами грузового эскортируемого судна с помощью каждой пары поворотных швартовочных устройств с магнитными механизмами, после чего грузовое эскортируемое судно с жестко состыкованными к нему автономными судами-буксирами совершает движение к причалу до получения очередной команды удаленного капитана о следующем маневре.
2. Способ швартовки морского грузового судна в автономном режиме, заключающийся в том, что
швартовку выполняют в портовой акватории с помощью группы автономных азимутальных судов-буксиров, управляемых дистанционно удаленным капитаном и посредством цифровой инструментальной платформы,
для чего к грузовому эскортируемому судну направляют группу из четного числа автономных судов-буксиров, каждое из которых оснащено двумя азимутальными винторулевыми колонками и двумя поворотными швартовочными устройствами с магнитными механизмами жесткого сцепления автономных судов-буксиров с корпусом грузового эскортируемого судна, действие которых обеспечивает возможность автономным судам-буксирам совершать маневры как при движении лагом, так и при развороте,
автономные суда-буксиры, участвующие в проводке грузового эскортируемого судна и расположенные между бортом и причалом, отстыковываются от этого борта грузового эскортируемого судна,
переходят на противоположный борт и осуществляют жесткую стыковку с этим бортом грузового эскортируемого судна,
производят прижим автономными судами-буксирами при движении их лагом в борт грузового эскортируемого судна до касания с отбойными устройствами причала,
осуществляют завершение швартовки грузового эскортируемого судна к причалу.
3. Способ отшвартовки морского грузового судна в автономном режиме, заключающийся в том, что
отшвартовку выполняют в портовой акватории с помощью группы автономных азимутальных судов-буксиров, управляемых дистанционно удаленным капитаном и посредством цифровой инструментальной платформы,
для чего к грузовому эскортируемому судну направляют группу из четного числа автономных судов-буксиров, каждое из которых оснащено двумя азимутальными винторулевыми колонками и двумя поворотными швартовочными устройствами с магнитными механизмами жесткого сцепления автономных судов-буксиров с корпусом грузового эскортируемого судна, действие которых обеспечивает возможность автономным судам-буксирам совершать маневры как при движении лагом, так и при развороте,
от причала грузового эскортируемого судна согласно команде автономные суда-буксиры направляют к борту грузового судна, противоположному швартовочному,
при этом автономные суда-буксиры разворачивают перпендикулярно носом к борту грузового эскортируемого судна и жесткое сцепление производят только одним поворотным швартовочным устройством с механизмом жесткого сцепления,
причем автономные суда-буксиры осуществляют как отвод грузового эскортируемого судна от причала, так и его прижим,
автономные суда-буксиры, осуществляющие отвод грузового судна, располагают у крайних точек вдоль бортовой линии грузового эскортируемого судна,
а осуществляющие прижим автономные суда-буксиры располагают в середине бортовой линии и производят прижим грузового судна в противоположном отводу направлении для придания ему оптимального положения при совершении маневра с учетом действия ветра и течения,
при этом выполняют отвод грузового судна с силой, превышающей силу, с которой выполняют прижим.
4. Цифровая инструментальная платформа управления движением группы автономных судов-буксиров в портовой акватории путем расчета команд управления движением судов-буксиров и эскортируемого судна на этапах проводки, швартовки к грузовому терминалу и отшвартовки от грузового терминала на основе навигационных данных, полученных от автономных судов-буксиров,
включающая в себя приемопередатчик для связи с автономными судами-буксирами и грузовым эскортируемым судном, радиолокационную систему, автоматическую идентификационную систему, модуль слияния цели в радиолокационной системе и автоматической идентификационной системе, компьютер дистанционного управления каждым автономным судном-буксиром группы, включающий в себя модуль сбора и отображения параметров состояния каждого автономного судна-буксира, приема оптических и радиолокационных сигналов от навигационного оборудования в портовой акватории, модуль дистанционного управления винторулевыми колонками автономного судна-буксира, модуль автоматической системы гидрометеорологического мониторинга заданной морской акватории, курсовую и позиционную системы отсчета, модуль оценки риска столкновения, модуль прокладки курса по электронной карте,
при этом цифровая инструментальная платформа соединена с портовой Системой Управления Движением Судов (СУДС) и комплектом технических средств высокоточного позиционирования грузового эскортируемого судна относительно грузового терминала, при этом модуль прокладки курса по электронной карте структурирован с возможностью использования предварительно проложенного курса грузового эскортируемого судна и его текущей позиции для определения следующей позиции эскортируемого судна на проложенном курсе и настроен на использовании текущей позиции судна и следующей позиции грузового эскортируемого судна для задания последующих путевых точек для каждого автономного судна-буксира для проводки ими эскортируемого судна по проложенному курсу, последующее задаваемое положение для каждого из группы автономных судов-буксиров вычисляется путем определения следующей путевой точки для каждого положения грузового эскортируемого судна указанной совокупностью средств и последующего обновления,
приемно-передающий модуль выполнен с возможностью передачи соответствующей новой путевой точки для каждого из группы автономных судов-буксиров соответствующему контроллеру каждого из указанной группы автономных судов-буксиров и с возможностью приема навигационной информации о местоположении каждого из указанной группы автономных судов-буксиров, а также грузового эскортируемого судна от соответствующих бортовых устройств по контролю движения каждого из указанной группы автономных судов-буксиров, а также грузового эскортируемого судна, причем информация в модуле прокладки курса является информацией о высокоточном позиционировании грузового эскортируемого судна.
| СИСТЕМА КООРДИНИРОВАННОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА В РЕЖИМАХ АВТОМАТИЧЕСКОГО И ДИСТАНЦИОННОГО УПРАВЛЕНИЯ | 2020 |
|
RU2741669C1 |
| Патрон многократного действия для развальцовки труб | 1966 |
|
SU202050A1 |
| 0 |
|
SU198953A1 | |
| СИСТЕМА ПРОГНОЗИРОВАНИЯ БЕЗОПАСНОГО РАСХОЖДЕНИЯ СУДОВ | 2020 |
|
RU2752725C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 2011 |
|
RU2463205C2 |
| CN 111290416 A, 16.06.2020. | |||

