(54) МЕХАНИЗМ УРАВНОВЕШИВАНИЯ СТРЕЛЫ МАНИПУЛЯТОРА
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм уравновешивания стрелы манипулятора | 1980 |
|
SU952579A2 |
| Механизм уравновешивания стрелы манипулятора | 1983 |
|
SU1090547A2 |
| Механизм уравновешивания стрелыМАНипуляТОРА | 1979 |
|
SU806405A1 |
| Механизм уравновешивания стрелы манипулятора | 1981 |
|
SU988547A1 |
| Пресс для правки профильных изделий | 1980 |
|
SU1011296A1 |
| Манипулятор | 1984 |
|
SU1296400A1 |
| ПОТОЧНАЯ ЛИНИЯ ДЛЯ ИЗГОТОВЛЕНИЯ КОРОБЧАТЫХ КОНСТРУКЦИЙ ИЗ СТАЛЬНЫХ ЛИСТОВ, ПОВОРОТНО-ГИБОЧНЫЙ ПРЕСС ДЛЯ ИЗГОТОВЛЕНИЯ КОРОБЧАТЫХ КОНСТРУКЦИЙ ИЗ СТАЛЬНЫХ ЛИСТОВ И МАНИПУЛЯТОР ЛИСТОВ К ГИБОЧНОМУ ПРЕССУ | 1993 |
|
RU2110349C1 |
| Манипулятор | 1990 |
|
SU1777993A1 |
| ПОРШНЕВАЯ МАШИНА | 1990 |
|
RU2020248C1 |
| Устройство для выдачи и ориентации штучных заготовок | 1987 |
|
SU1479178A1 |
Изобретение относится к манипуляторам для механизации технологических процессов, а именно к механизмам уравновешивания..стрелы манипулятора.
По основному авт.св. № 806405 известен механизм уравновешивания стрелы манипулятора, содержащий стрелу, корпус и силовой цилиндр, связанный со стрелой механической передачей, выполненной в виде кулачкового механизма 10Недостатком известного устройства является то, что он обеспечивает полное уравновешивание стрелы при повороте корпуса «только относительно вертикальной оси, при повороте же корпуса в плоскости поворота стрелы при перпендикулярно плоскости поворота стрелы эта уравновешенность нарушается, что снижает эксплуатационные возможности механизма уравновешивания в манипуляторах, произвольным образом ориентированных в пространстве.
Целью изобретения является расширение эксплуатационных возможностей устройства.
Эта цель достигается тем, что механизм уравновешивания снабжен датчинами углов поворота корпуса в двух йзаимно перпендикулярных плоскостях и приводом поворота штока силового цилиндра, причем датчик угла поворота корпуса в плоскости поворота стрелы связан через дополнительно введенный преобразователь с приводом поворота штока силового цилиндра, а датчик угла поворота корпуса,
10 перпендикулярного плоскости поворота стрелы, связан через дополнительно введенный регулятор давления с рабочей полость|р силового цилиндра.
15
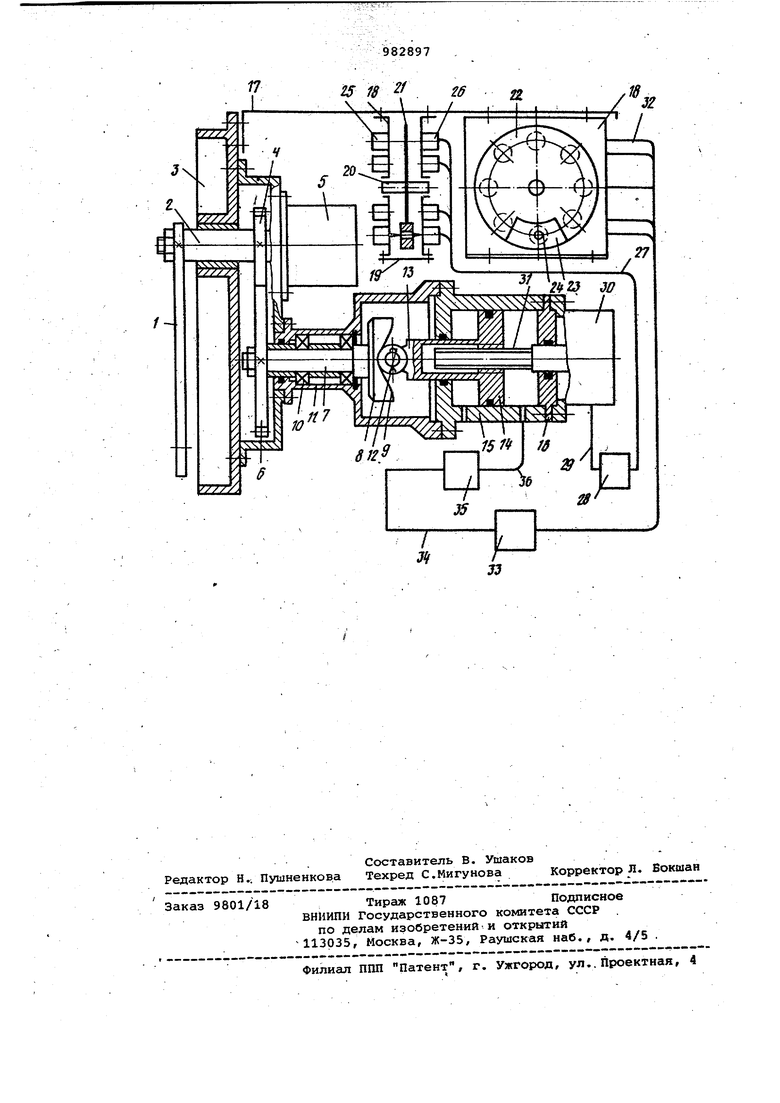
На чертеже показан механизм уравновешивания.
Механизм уравновешивания содержит стрелу 1, закрепленную на валу 2, расположенном в корпусе 3. На
20 валу 2 закреплена также шестерня 4, связанная с валом приводного двигателя 5. С шестерней 4 находится в зацеплении шестерня 6, имеющая в два раза большее число зубьев,
25 нежели шестерня 4. Вал 7 соединен с шестерней бис торцовым кулачком 8, рабочая поверхность 9 которого выполнена по синусоиде. Подшипники 10 предназначены для установки ва30ла 7 в корпусе 11.
С поверхностью 9 торцового кулачка 8 взаимодействуют ролики 12, установленные на штоке 13 силового цилиндра, поршень 14 которого располагается в гильзе 15 с крвлшкой 16
К корпусу 3 крепится кронштейн 17, на,котором установлены датчики углов поворрта корпуса 3, выполненные, например, в виде пластин 18 с крышками 19, образующие корпусы, в которых на осях 20 установлены маятники 21 и 22, выполненные в вид неуравновешенных дисков, для чего они снабжены грузами-дисбалансами 23. В дисбалансах 23 выполнены отверстия 24, пропускающие световой поток от источников {фотодатчиков) 25 к приемникам 26, расположенным на пластинах 18 и с противоположных сторон маятников 21 и 22 на окружностях, концентричных осям маятНИКОВ. Маятник 21 расположен в плоскости, параллельный плоскости вращения стрелы 1, маятник 22 расположен в плоскости фигуры. Группа фотоприемников (фоторез.исторов) 26 маятника 21 с помощью каналов 27 связи соединена преобразователем 28 и, далее, каналом 29 с приводом поворота 30; выходной вал 31 этого привод через шлицевую передачу связан со штоком 13 силового цилиндра.
Группа фотоприемников 26 маятника 22 с помощью каналов 32 связи связана со своим преобразователем 33 и, далее, через канал 34 и регулятор 35 давления - с рабочей полостью силового цилиндра с помощью трубопровода 36.
Механизм уравновешивания стрелы манипулятора работает следующим образом.
При неподвижном положении механизма в пространстве, стрела 1, поворачиваясь на валу 2, поворачивает одновременно и шестерню 4, шестерню 6 и связанный с ней вал 7, а так же кулачок 8, торцовая поверхность 9 которого взаимодействует с роликами 12, расположенными на штоке 13 силового цилиндра, поршень 14 которого находится под давлением рабочей среды. При этом создается восстанавливающий момент, компенсирующий внешний момент, вызванный неуравновешенностью стрелы 1, которая таким образом уравновешена при любых углах ее поворота.
При повороте механизма как единого целого вокруг оси, перпендикулярной плоскости прилагаемой фигуры, начинает поворачиваться и маятник 22. При этом отверстие 24 этого мая ника, поврачиваясь по окружности, на которой установлены фотодатчики 25-и фотоприемники 26, открывает
доступ световому потоку к соответствующему фоторёзистору 26. При этом через канал 32 связи сигнал поступает JC преобразователю 33, и, далее, через канал 34 к регулятору 35 давления, изменяя (уменьшая) давление под поршнем 14 силового цилиндра. Изменение носит дискретный характер, однако, увеличивая (или уменьшая) количество пар источников 25 света фоторезисторов 26 можно в каждом конкретном случае получить оптимальную величину приближения к идеальной (косинусоидальной) зависимости давления от угла поворота.
При повороте механизма как единого целого вокруг оси вращения стрелы 1 одновременно и на тот же угол поворачивается и маятни 21, отверстие 24 которого открывает доступ света к соответствующему фотоприемнику 26. Далее, сигнал по каналу 27 связи поступает к преобразователю 28 и, далее, по каналу 29 - к приводу поворота 30; его выходной вал 31 посредством шлицевого соединения поворачивает поршень 14 силового цилиндра и ролики 12 в сторону, противоположную направлению поворота стрелы 1. При этом взаимное угловое положение синусоидальной поверхности 9, кулачка 8 и стрелы 1 остается неизменным (с точностью до дискрета, обусловленного конечным числом пар источник света 25 - фотоприемник 26)
Предлагаем1лй механизм обеспечивает уравновешивание стрелы манипулятора при любом ее пространственном положении.
Формула изобретения
Механизм уравновешивания стрелы манипулятора по авт.св. № 806405, отлич ающ-ийся тем, что, с целью расширения эксплуатационных возможностей, он снабжен датчиками углов поворота корпуса в двух взаимно перпендикулярных плоскостях и приводом поворота штока силового цилиндра, причем датчик угла поворота корпуса в плоскости поворота стрелы связан через дополнительно введенный преобразователь с приводом поворота штока силового цилиндра, а датчик угла поворота корпуса в плоскости, перпендикулярной к плоскости поворота стрелы, связан через дополнительно введенный регултор давления .с рабочей полостью силового цилиндра.
Источники информации, принятые во внимание при экспертизе
