Изобретение относится к ультразвуковым локационным измерителям уровня жидкости и сыпучих продуктов в резервуарах на автозаправочных станциях и нефтебазах, а также в химической, нефтяной, пищевой и других отраслях народного хозяйства.
Известен способ компенсации погрешностей акустических локационных уровнемеров (патент РФ №2129703, опубл. 27.04.1999), включающий излучение и прием ультразвуковых импульсов, формирование реперного и измерительного временных интервалов, их цифровое преобразование соответственно с помощью синхро- и счетных импульсов и индикацию расстояния от акустического датчика до измеряемого уровня.
Недостатком известного способа является низкая точность измерения, обусловленная невозможностью учета временного интервала между началом отраженного ультразвукового импульса и моментом срабатывания порогового устройства, которое может изменяться в турбулентной диспергирующей газовой или жидкостной среде, а также в средах с изменяющимся коэффициентом затухания.
Наиболее близким по совокупности признаков к предлагаемому способу является способ компенсации погрешностей акустических локационных уровнемеров (заявка РФ №2006109659, МПК (2006.01), G01B 17/00, опубл. 10.10.2007), включающий измерение времени двунаправленного прохождения ультразвукового импульса от излучателя до отражателя и обратно с целью устранения зависимости результата измерения от неоднозначности определения момента вхождения первого эхо-импульса, измеряют временной интервал между пиком максимальной амплитуды первого эхо-импульса и пиком максимальной амплитуды противоположной полярности второго эхо-импульса, который прямо пропорционален измеряемой длине.
Недостатком известного способа является низкая стабильность измерения, обусловленная возможным отсутствием второго отраженного ультразвукового импульса в средах с большим коэффициентом затухания.
В изобретении решается задача создания способа, обеспечивающего компенсацию погрешности и повышение стабильности измерений в турбулентной диспергирующей газовой или жидкостной среде, а также в средах с большим коэффициентом затухания.
Поставленная задача решена за счет того, что способ компенсации погрешности измерения ультразвукового уровнемера, так же как в прототипе, заключается в измерении временного интервала между излученным импульсом и срабатыванием порогового устройства, его преобразовании в цифровой код и вычислении расстояния до отражающей поверхности путем умножения скорости распространения ультразвука в контролируемой среде на временной интервал.
Согласно изобретению, используя второе пороговое устройство с пороговым напряжением U2, превышающим пороговое напряжение U1 первого порогового устройства, измеряют временной интервал между срабатыванием первого и второго пороговых устройств, определяют временной интервал между срабатыванием первого порогового устройства и началом эхо-импульса из выражения:
где (t2-t1) - временной интервал между срабатыванием первого и второго пороговых устройств,
затем определяют временной интервал распространения ультразвукового импульса в контролируемой среде из выражения:
tp=t1-Δt,
и определяют расстояние до отражающей поверхности путем умножения временного интервала tp на скорость распространения ультразвука в контролируемой среде и производят индикацию этого расстояния.
За счет использования двух пороговых устройств с отличающимися порогами срабатывания обеспечивается возможность вычисления временного интервала между началом эхо-импульса и моментом срабатывания порогового устройства, вычитание этого интервала из общего времени распространения ультразвукового импульса и соответственно осуществляется компенсация погрешности измерения ультразвукового уровнемера.
На фиг.1 представлена диаграмма, иллюстрирующая предлагаемый способ.
На фиг.2 представлена схема устройства, иллюстрирующая предлагаемый способ.
Устройство, реализующее предлагаемый способ, содержит блок управления и индикации 1, выход которого соединен с генератором ультразвуковых импульсов 2 и входом S первого триггера 3. Генератор ультразвуковых импульсов 2 подключен к ультразвуковому излучателю 4. Ультразвуковой приемник 5 соединен с усилителем 6, выход которого подключен к входам первого 7 и второго 8 пороговых устройств. К другому входу первого порогового устройства подключен первый источник опорного напряжения 9 (ИОН1), а второй источник опорного напряжения 10 (ИОН2) подключен к входу второго порогового устройства 8. Выход первого порогового устройства 7 подключен к входу R первого триггера 3 и входу S второго триггера 11. Выход второго порогового устройства 8 подключен к входу R второго триггера 11. Выход первого триггера 3 подключен к входу блока управления и индикации 1, к которому подключен выход второго триггера 11.
Блок управления и индикации 1 может быть выполнен
на микроконтроллере ATMEGA16, для подсчета временных интервалов используются два внутренних таймера-счетчика. Первый 3 и второй 11 триггеры выполнены на стандартных микросхемах К1554ТМ2. В качестве первого 7 и второго 8 пороговых устройств использованы компараторы К521САЗ. Генератор ультразвуковых импульсов 2 может быть выполнен по схеме с разрядом накопительной емкости на тиристорах типа КУ104Г. Приемник 5 и излучатель 4 могут быть изготовлены из любой пьезокерамики, например ЦТС-19. Усилитель 6 может быть выполнен на операционном усилителе например 544УД2. Первый 9 и второй 10 источники опорного напряжения выбраны типовыми REF 192 фирмы ANALOG DEVICES в стандартном включении.
Устройство работает следующим образом.
Блок управления и индикации 1 вырабатывает импульс запуска для ультразвукового генератора 2, этим же импульсом первый триггер 3 устанавливается в состояние логической единицы. Генератор ультразвуковых импульсов 2 возбуждает излучатель 4. Излученный ультразвуковой импульс распространяется по контролируемой среде и принимается приемником 5, усиливается усилителем 6 и поступает на вход первого 7 и второго 8 пороговых устройств (фиг.2). На второй вход порогового устройства 7 подается напряжение с источника опорного напряжения 9 (ИОН1) U1. Как только напряжение на выходе усилителя 6 превысит напряжение U1, выход первого порогового устройства 7 переключится в состояние логической 1, которая сбросит первый триггер 3 в состояние логического нуля (точка t1 фиг.1), а второй триггер 11 установит в состояние логической единицы (точка t1 фиг.1). Одновременно сигнал с выхода усилителя 6 поступает на вход второго порогового устройства 8, на другой вход которого подается напряжение U2 с источника опорного напряжения 10 (ИОН2). Переключение второго порогового устройства 8 в состояние логической единицы произойдет, если входное напряжение превысит напряжение U2 (точка t2 фиг.1). Логическая единица на выходе второго порогового устройства 8 установит второй триггер 11 в состояние логического нуля. Таким образом, на выходе первого триггера 7 получится импульс, длительность которого равна времени (t1-t0), a на выходе второго порогового устройства 8 будет импульс длительностью t2-t1 (фиг.1). Блок управления и индикации 1 осуществляет вычисление временного интервала Δt между приходом эхо-импульса и срабатыванием первого порогового устройства, определяет время распространения ультразвукового импульса в контролируемой среде tр, вычисляет расстояние до отражающей поверхности h и производит индикацию этого расстояния.
Расстояние до отражающей поверхности определяют по формуле:
h=C·tp;
где С - скорость распространения ультразвука в контролируемой среде.
Для правильной работы устройства необходимо выполнение условия U2>U1.
Предлагаемый способ был использован в ультразвуковом уровнемере светлых нефтепродуктов. U1 равнялось 1 вольт, U2-2 вольта, длина волны ультразвукового импульса λ - 4 мм, измеренное осциллографом GDS 820G время t1 равнялось 1215 мкс, t2 - 1221 мкс, tp-u - 1208 мкс, расчетное время распространения составило:

Ошибка измерения уровня Δh составила:
Δh=C·(tp-p- tp-u)=(1,5·l06)·(1·10-6)=1,5 мм.
Экспериментально установлено, что погрешность измерения уровня не превышает λ/2.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КОМПЕНСАЦИИ ПОГРЕШНОСТИ ИЗМЕРЕНИЯ УЛЬТРАЗВУКОВОГО УРОВНЕМЕРА | 2008 |
|
RU2380659C1 |
| СПОСОБ КОМПЕНСАЦИИ ПОГРЕШНОСТИ ИЗМЕРЕНИЯ УЛЬТРАЗВУКОВОГО УРОВНЕМЕРА | 2009 |
|
RU2389982C1 |
| СПОСОБ КОМПЕНСАЦИИ ПОГРЕШНОСТИ ИЗМЕРЕНИЯ УЛЬТРАЗВУКОВОГО УРОВНЕМЕРА | 2009 |
|
RU2389981C1 |
| УСТРОЙСТВО КОМПЕНСАЦИИ ПОГРЕШНОСТИ ИЗМЕРЕНИЯ УЛЬТРАЗВУКОВОГО УРОВНЕМЕРА | 2009 |
|
RU2406979C2 |
| УСТРОЙСТВО КОМПЕНСАЦИИ ПОГРЕШНОСТИ ИЗМЕРЕНИЯ УЛЬТРАЗВУКОВОГО УРОВНЕМЕРА | 2009 |
|
RU2396521C1 |
| УСТРОЙСТВО КОМПЕНСАЦИИ ПОГРЕШНОСТИ ИЗМЕРЕНИЯ УЛЬТРАЗВУКОВОГО УРОВНЕМЕРА | 2008 |
|
RU2384822C1 |
| СПОСОБ КОМПЕНСАЦИИ ПОГРЕШНОСТИ ИЗМЕРЕНИЯ УЛЬТРАЗВУКОВОГО УРОВНЕМЕРА | 2011 |
|
RU2471158C1 |
| СПОСОБ КОМПЕНСАЦИИ ПОГРЕШНОСТИ ИЗМЕРЕНИЯ УЛЬТРАЗВУКОВОГО ЛОКАТОРА | 2013 |
|
RU2544310C1 |
| УСТРОЙСТВО КОМПЕНСАЦИИ ПОГРЕШНОСТИ ИЗМЕРЕНИЯ УЛЬТРАЗВУКОВОГО УРОВНЕМЕРА | 2011 |
|
RU2470267C1 |
| СПОСОБ КОМПЕНСАЦИИ ПОГРЕШНОСТИ ИЗМЕРЕНИЯ УЛЬТРАЗВУКОВОГО ЛОКАТОРА | 2015 |
|
RU2599602C1 |
Изобретение относится к ультразвуковым локационным измерителям уровня жидкости и сыпучих продуктов в резервуарах на автозаправочных станциях и нефтебазах, а также в химической, нефтяной, пищевой и других отраслях народного хозяйства. Сущность: способ заключается в том, что, используя второе пороговое устройство с пороговым напряжением, превышающим пороговое напряжение первого порогового устройства, измеряют временной интервал между срабатыванием первого и второго пороговых устройств. Рассчитывают временной интервал между срабатыванием первого порогового устройства и началом эхо-импульса. Затем определяют временной интервал распространения ультразвукового импульса в контролируемой среде и определяют расстояние до отражающей поверхности путем умножения рассчитанного временного интервала на скорость распространения ультразвука в контролируемой среде и производят индикацию этого расстояния. Технический результат: компенсация погрешности измерения ультразвукового уровнемера, обусловленная наличием неконтролируемого временного интервала между началом эхо-импульса и срабатыванием порогового устройства. 2 ил.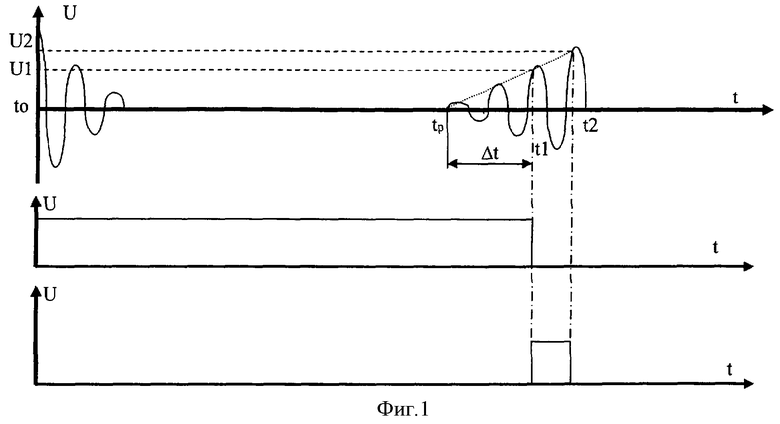
Способ компенсации погрешности измерения ультразвукового уровнемера, включающий измерение временного интервала между излученным импульсом и срабатыванием порогового устройства, его преобразование в цифровой код и вычисление расстояния до отражающей поверхности путем умножения скорости распространения ультразвука в контролируемой среде на временной интервал, отличающийся тем, что, используя второе пороговое устройство с пороговым напряжением U2, превышающим пороговое напряжение U1 первого порогового устройства, измеряют временной интервал между срабатыванием первого и второго пороговых устройств (t2-t1), рассчитывают временной интервал между срабатыванием первого порогового устройства и началом эхо-импульса из выражения

где (t2-t1) - временной интервал между срабатыванием первого и второго пороговых устройств,
затем определяют временной интервал распространения ультразвукового импульса в контролируемой среде из выражения
tp=t1-Δt,
и определяют расстояние до отражающей поверхности путем умножения временного интервала tp на скорость распространения ультразвука в контролируемой среде и производят индикацию этого расстояния.
| RU 2006109659 А, 10.10.2007 | |||
| СПОСОБ КОМПЕНСАЦИИ ПОГРЕШНОСТЕЙ АКУСТИЧЕСКИХ ЛОКАЦИОННЫХ УРОВНЕМЕРОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2129703C1 |
| Способ компенсации погрешностей акустических локационных уровнемеров и устройство для его осуществления | 1978 |
|
SU765659A1 |
| Способ компенсации погрешностей акустических локационных уровнемеров и устройство для его осуществления | 1985 |
|
SU1529047A1 |

