Изобретение относится к ультразвуковым локационным измерителям уровня жидкости и сыпучих продуктов в резервуарах на автозаправочных станциях и нефтебазах, а также в химической, нефтяной, пищевой и других отраслях народного хозяйства.
Известен способ компенсации погрешностей акустических локационных уровнемеров (патент РФ №2129703, МПК G01F 23/28, опубл. 27.04.1999), включающий излучение и прием ультразвуковых импульсов, формирование реперного и измерительного временных интервалов, их цифровое преобразование соответственно с помощью синхро- и счетных импульсов и индикацию расстояния от акустического датчика до измеряемого уровня.
Недостатком известного способа является низкая точность измерения, обусловленная невозможностью учета временного интервала между началом отраженного ультразвукового импульса и моментом срабатывания порогового устройства, которое может изменяться в турбулентной диспергирующей газовой или жидкостной среде, а также в средах с изменяющимся коэффициентом затухания.
Наиболее близким по совокупности признаков к предлагаемому способу является способ компенсации погрешностей акустических локационных уровнемеров (заявка РФ №2006109659, МПК (2006.01) G01B 17/00, опубл. 10.10.2007), включающий измерение времени двунаправленного прохождения ультразвукового импульса от излучателя до отражателя и обратно с целью устранения зависимости результата измерения от неоднозначности определения момента вхождения первого эхо-импульса, измеряют временной интервал между пиком максимальной амплитуды первого эхо-импульса и пиком максимальной амплитуды противоположной полярности второго эхо-импульса, который прямо пропорционален измеряемой длине.
Недостатком известного способа является низкая стабильность измерения, обусловленная возможным отсутствием второго отраженного ультразвукового импульса в средах с большим коэффициентом затухания.
В изобретении решается задача создания способа, обеспечивающего снижение погрешности и повышение стабильности измерений в турбулентной диспергирующей газовой или жидкостной среде, а также в средах с большим коэффициентом затухания.
Поставленная задача решена за счет того, что в способе компенсации погрешности измерения ультразвукового уровнемера измеряют временной интервал между двумя сигналами, преобразуют его в цифровой код и вычисляют расстояние до отражающей поверхности путем умножения скорости распространения ультразвука в контролируемой среде на измеренный временной интервал.
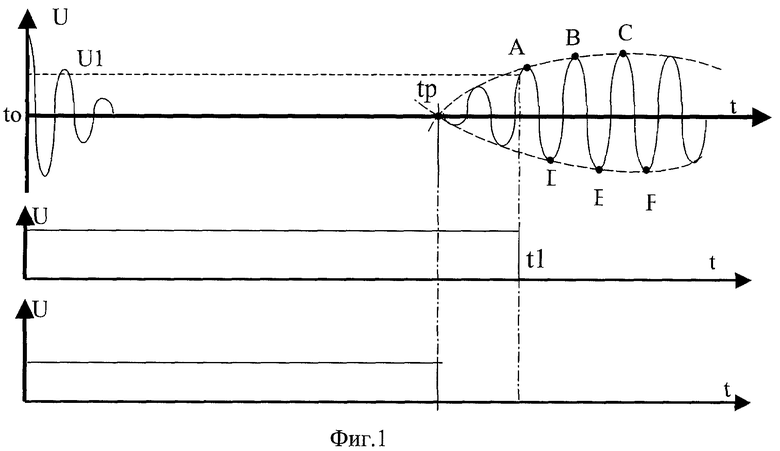
Согласно изобретению после измерения временного интервала между излученным и принятым сигналами производят преобразование входного аналогового сигнала в цифровой код с частотой, не менее чем в десять раз превышающей частоту входного сигнала, запоминают его, определяют не менее трех точек минимума и трех точек максимума в соседних периодах запомненного сигнала, строят одну огибающую входного сигнала по этим точкам максимума и вторую огибающую входного сигнала по этим точкам минимума, определяют временную координату точки пересечения этих огибающих, которую принимают за начало эхо-импульса и используют при определении расстояния до отражающей поверхности.
Преобразование входного аналогового сигнала в цифровой код с частотой, не менее чем в десять раз превышающей частоту входного сигнала, позволяет определить координаты максимумов и минимумов в соседних периодах с погрешностью не более 20%, так как за один период входного сигнала будет произведено 10 отсчетов, а на одном периоде входного сигнала имеется два экстремума. Уменьшение частоты преобразования входного аналогового сигнала приведет к увеличению погрешности определения координат точек минимумов и максимумов. Построение одной огибающией входного сигнала не менее чем по трем точкам максимума в соседних периодах и второй огибающей входного сигнала не менее чем по трем точкам минимума в соседних периодах и нахождение временной координаты точки пересечения этих огибающих, которую принимают за начало эхо-импульса (фиг.1), позволяет компенсировать погрешность измерения ультразвукового уровнемера. Исключение второго отраженного эхо- импульса, которого может не быть в турбулентной диспергирующей газовой или жидкостной среде, а также в средах с большим коэффициентом затухания, из процесса измерения повышает стабильность измерения.
На фиг.1 представлена диаграмма, иллюстрирующая заявленный способ.
На фиг.2 представлена схема устройства для осуществления предлагаемого способа.
На фиг.3 представлен пример осциллограммы эхо-импульса и двух полученных огибающих.
Устройство, реализующее предлагаемый способ, содержит блок управления и индикации 1 (фиг.2), выход которого соединен с генератором 2 и входом блока формирования временного интервала 3. Генератор 2 подключен к излучателю 4. Приемник 5 соединен с усилителем 6, выход которого подключен к входам порогового устройства 7 и аналого-цифровому преобразователю 8. К другому входу порогового устройства 7 подключен источник опорного напряжения 9 (ИОН). Выход порогового устройства 7 подключен к входу блока формирования временного интервала 3, выход которого подключен к входам блока управления и индикации 1, триггеру 10 и блоку задержки 11. Выход блока задержки 11 подключен к другому входу триггера 10 и к блоку управления и индикации 1. Выход триггера 10 подключен к входу блока формирования адреса 12 и аналого-цифровому преобразователю 8 (АЦП). Выход аналого-цифрового преобразователя 8 (АЦП) подключен к входу данных оперативного запоминающего устройства 13 (ОЗУ). Второй выход аналого-цифрового преобразователя 8 (АЦП) подключен к блоку формирования адреса 12, выход которого подключен к адресному входу оперативного запоминающего устройства 13 (ОЗУ), выход которого подключен к блоку управления и индикации 1, который связан с блоком формирования адреса 12.
Блок управления и индикации 1 может быть выполнен на микроконтроллере ATMEGA16 и семисегментных индикаторах типа DA56-11SRWA, для подсчета временного интервала используется внутренний таймер-счетчик. Блок формирования временного интервала 3 выполнен на стандартной микросхеме К1554ТМ2. В качестве порогового устройства 7 использован компаратор К521СА3. Генератор 2 может быть выполнен по схеме с разрядом накопительной емкости на тиристорах типа КУ104Г. Приемник 5 и излучатель 4 могут быть изготовлены из любой пьезокерамики, например ЦТС-19. Усилитель 6 может быть выполнен на операционном усилителе, например К544УД2. Источник опорного напряжения 9 (ИОН) выбран типовым REF 192 фирмы ANALOG DEVICES в стандартном включении, аналого-цифровой преобразователь 8 (АЦП) выбирается типовым из условия, что время преобразования должно быть не менее чем в десять раз меньше периода входного аналогового сигнала, например для входного сигнала частотой 1 мГц можно применить микросхему AD9057BRS40, оперативное запоминающее устройство 13 (ОЗУ) выбирается из требования максимального времени записи данных, которое должно быть меньше времени преобразования аналого-цифрового преобразователя 8 (АЦП), и объема хранимых данных, который должно быть больше, чем 10*(Tc/tАЦП), например для частоты 1 мГц можно применить микросхему К565РУ5, триггер 10 может быть выполнен на типовой микросхеме, например К1554ТМ2, блок задержки может быть выполнен на микросхеме К1554АГ1 в типовом включении, время задержки должно быть больше или равно пяти периодам входного сигнала, блок формирования адреса 12 может быть выполнен на типовых двоичных реверсивных счетчиках с задержкой переключения меньшей, чем время преобразования аналого-цифрового преобразователя 8 (АЦП), например К1554ИЕ7.
Устройство работает следующим образом.
Блок управления и индикации 1 выдает разрешение на автономную работу блока формирования адреса 12 и вырабатывает импульс запуска для ультразвукового генератора 2, этим же импульсом блок формирования временного интервала 3 устанавливается в состояние логической единицы. Генератор 2 возбуждает излучатель 4. Излученный ультразвуковой импульс распространяется по контролируемой среде и принимается приемником 5, усиливается усилителем 6 и поступает на вход аналого-цифрового преобразователя 8 (АЦП). Одновременно сигнал с выхода усилителя 6 поступает на вход порогового устройства 7. На второй вход порогового устройства 7 подается напряжение с источника опорного напряжения 9 (ИОН) U1. Как только напряжение на выходе усилителя 6 превысит напряжение U1, выход порогового устройства 7 переключится в состояние логической 1 и сбросит блок формирования временного интервала 3 в состояние логического нуля (точка tI, фиг.1). Этот сигнал подается на вход триггера 10 и вход блока задержки 11, на выходе триггера 10 появляется логическая единица, которая разрешает работу блока формирования адреса 12 и аналого-цифрового преобразователя 8 (АЦП), который преобразует аналоговый сигнал в цифровой вид с частотой, в десять раз превышающий частоту входного сигнала. Эти данные поступают на вход данных оперативного запоминающего устройства 13 (ОЗУ) и записываются по адресу, сформированному блоком формирования адреса 12. Одновременно аналого-цифровой преобразователь 8 (АЦП) выдает импульс на блок формирования адреса 12 для формирования следующего адреса, и за время преобразования аналого-цифрового преобразователя 8 (АЦП) на выходе блока формирования адреса 12 сформируется следующий адрес. После срабатывания блока задержки 11 на его выходе появляется импульс, который поступает на блок управления и индикации 1, сигнализируя о окончании процесса записи данных, и сбрасывает триггер 10 в состояние логического нуля. Нулевой уровень на выходе триггера запрещает работу блока формирования адреса 11 и аналого-цифрового преобразователя 8 (АЦП). После этого блок управления и индикации 1 в соответствии с программой осуществляет последовательную выборку данных из оперативного запоминающего устройства 13 (ОЗУ) для определения трех точек максимума и трех точек минимума. По этим точкам составляет систему трех квадратных уравнений с тремя неизвестными:

где y1 и x1, y2 и х2, y3 и x3 - координаты трех точек А, В и С соответственно.
Решает эту систему уравнений и находит коэффициенты а1, b1 и c1 для уравнения первой огибающей:
 ,
,
Аналогично находит коэффициенты для уравнения второй огибающей, но при этом использует координаты точек D, Е и F:
 ,
,
Затем находит точку пересечения этих огибающих путем приравнивания уравнений и его решения:
 ,
,
Временную координату этой точки принимает за начало эхо-импульса и использует в расчетах расстояния до отражающей поверхности.
В качестве примера рассмотрим определение расстояния предлагаемым способом. В воде на расстоянии 250 см от излучателя 4 был установлен приемник 5. Частота ультразвуковых сигналов составляла 600 кГц, соответственно длина волны λ равнялась 2,5 мм. В качестве аналого-цифрового преобразователя 8 применялась микросхема AD9057BRS40 с частотой преобразования 40 МГц. Излучение и прием ультразвуковых сигналов производили с помощью устройства, реализующего предлагаемый способ, и для сравнения наблюдали с помощью осциллографа GDS820G на выходе усилителя 6 этого устройства. Полученные точки максимумов имели координаты А (0,71; 1701), В (0,89; 1702,6), С (1,02; 1704,5). Точки минимумов имели координаты D (-0,59; 1700,2), Е (-0,79; 1701,9), F (-0,98; 1703,7).
Используя координаты этих точек, блок управления и индикации 1 определил коэффициенты а1, b1 с1 и а2, b2, с2. Временная координата точки пересечения, определенная по этим коэффициентам, равна:
х=1696,64 мкс.
Для сравнения на фиг.3 показана осциллограмма принятого сигнала и двух полученных огибающих, из которой видно, что расчетная временная координата точки пересечения двух огибающих не совпадает с началом сигнала. Измеренное осциллографом GDS 820G время tp составило 1697 мкс.
Ошибка измерения уровня Δh составила:
Ah=C·(1697-1696,64)=(1,5·106)·(0,36·10-6)=0,54 мм,
где С - скорость распространения ультразвука в воде.
Таким образом, экспериментально установлено, что погрешность измерения уровня не превышает λ/2.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО КОМПЕНСАЦИИ ПОГРЕШНОСТИ ИЗМЕРЕНИЯ УЛЬТРАЗВУКОВОГО УРОВНЕМЕРА | 2009 |
|
RU2406979C2 |
| СПОСОБ КОМПЕНСАЦИИ ПОГРЕШНОСТИ ИЗМЕРЕНИЯ УЛЬТРАЗВУКОВОГО УРОВНЕМЕРА | 2011 |
|
RU2471158C1 |
| УСТРОЙСТВО КОМПЕНСАЦИИ ПОГРЕШНОСТИ ИЗМЕРЕНИЯ УЛЬТРАЗВУКОВОГО УРОВНЕМЕРА | 2011 |
|
RU2470267C1 |
| СПОСОБ КОМПЕНСАЦИИ ПОГРЕШНОСТИ ИЗМЕРЕНИЯ УЛЬТРАЗВУКОВОГО УРОВНЕМЕРА | 2008 |
|
RU2380659C1 |
| УСТРОЙСТВО КОМПЕНСАЦИИ ПОГРЕШНОСТИ ИЗМЕРЕНИЯ УЛЬТРАЗВУКОВОГО УРОВНЕМЕРА | 2008 |
|
RU2384822C1 |
| УЛЬТРАЗВУКОВОЙ УРОВНЕМЕР | 1992 |
|
RU2032154C1 |
| УСТРОЙСТВО КОМПЕНСАЦИИ ПОГРЕШНОСТИ ИЗМЕРЕНИЯ УЛЬТРАЗВУКОВОГО УРОВНЕМЕРА | 2009 |
|
RU2396521C1 |
| Эхолот | 2022 |
|
RU2789812C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ФОРМЫ ИНДИКАТРИСЫ РАССЕЯНИЯ ДЕФЕКТА ПРИ УЛЬТРАЗВУКОВОМ КОНТРОЛЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2581083C1 |
| УЛЬТРАЗВУКОВОЙ ЭХОИМПУЛЬСНЫЙ ТОЛЩИНОМЕР | 2003 |
|
RU2246694C1 |

Изобретение относится к ультразвуковым локационным измерителям уровня жидких и сыпучих продуктов в резервуарах на автозаправочных станциях и нефтебазах, а также в химической, нефтяной, пищевой и других отраслях народного хозяйства. Сущность: включает измерение временного интервала между двумя сигналами, преобразование входного аналогового сигнала в цифровой код с частотой, не менее чем в десять раз превышающей частоту входного сигнала, и его запоминание. После этого осуществляют определение не менее трех точек минимума и трех точек максимума в соседних периодах запомненного сигнала, построение одной огибающей входного сигнала по трем точкам максимума и второй огибающей входного сигнала по трем точкам минимума. Затем осуществляют определение временной координаты точки пересечения этих огибающих, которую принимают за начало эхо-импульса и используют при определении расстояния до отражающей поверхности путем умножения на скорость распространения ультразвука в контролируемой среде. Технический результат: компенсация погрешности измерения ультразвукового уровнемера, обусловленная наличием неконтролируемого временного интервала между началом эхо-импульса и срабатыванием порогового устройства. 3 ил.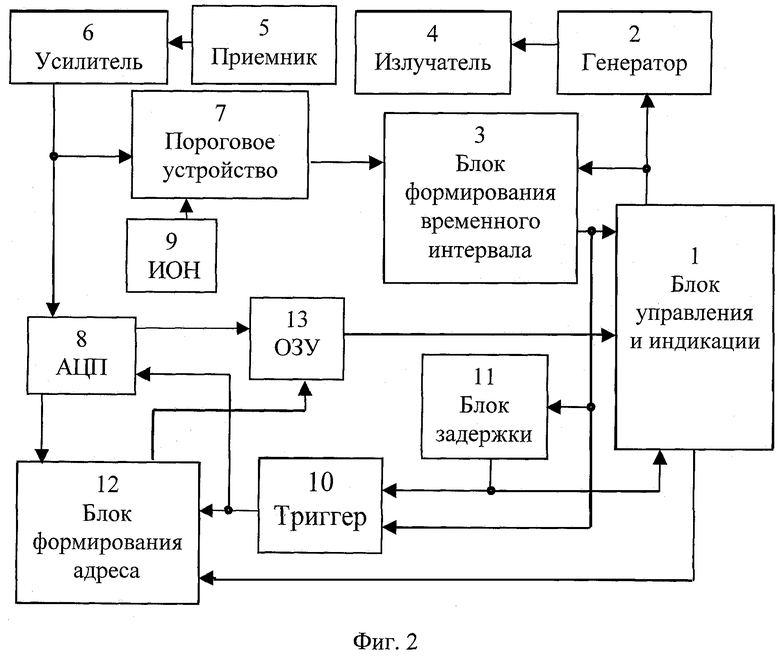
Способ компенсации погрешности измерения ультразвукового уровнемера, включающий измерение временного интервала между двумя сигналами, его преобразование в цифровой код и вычисление расстояния до отражающей поверхности путем умножения скорости распространения ультразвука в контролируемой среде на измеренный временной интервал, отличающийся тем, что после измерения временного интервала между излученным и принятым сигналами производят преобразование входного аналогового сигнала в цифровой код с частотой, не менее чем в десять раз превышающей частоту входного сигнала, запоминают его, определяют не менее трех точек минимума и трех точек максимума в соседних периодах запомненного сигнала, строят одну огибающую входного сигнала по этим точкам максимума и вторую огибающую входного сигнала по этим точкам минимума, определяют временную координату точки пересечения этих огибающих, которую принимают за начало эхо-импульса и используют при определении расстояния до отражающей поверхности.
| СПОСОБ ИЗМЕРЕНИЯ ДЛИНЫ ТРУБ | 2006 |
|
RU2321827C2 |
| СПОСОБ КОМПЕНСАЦИИ ПОГРЕШНОСТЕЙ АКУСТИЧЕСКИХ ЛОКАЦИОННЫХ УРОВНЕМЕРОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2129703C1 |
| Способ компенсации погрешностей акустических локационных уровнемеров и устройство для его осуществления | 1978 |
|
SU765659A1 |
| Способ компенсации погрешностей акустических локационных уровнемеров и устройство для его осуществления | 1985 |
|
SU1529047A1 |

