Изобретения относятся к области радиолокации и могут использоваться в радиолокационных станциях (РЛС) для защиты от пассивных помех в процессе осмотра зоны обзора.
При осмотре зоны обзора РЛС, как правило, происходит множество обнаружений отражений зондирующего сигнала (отражений), вызванных пассивными помехами, которые, поступая в систему обработки радиолокационной информации, перегружают ее, уменьшая таким образом пропускную способность РЛС. Появление пассивных помех в зоне обзора РЛС объясняется как естественными факторами: например, неоднородностями атмосферы, отражениями от подстилающей поверхности, птицами, так и искусственными: например, дипольными отражателями, разбрасываемыми противником с целью маскировки своих средств нападения и с целью перегрузки системы обработки информации.
Известен способ защиты от пассивных помех, основанный на череспериодной компенсации (ЧПК) принятых сигналов (Теоретические основы радиолокации. Под ред. Ширмана Я.Д. - М., Сов радио, 1970, с.467). Уменьшение количества обнаружений пассивных помех достигается за счет излучения в направлении зоны обзора не менее двух импульсов и последующего вычитания отраженных сигналов. При этом на выходе системы ЧПК остатки пассивных помех весьма незначительны.
Поскольку в РЛС (особенно в мобильных) всегда существует жесткий дефицит временных и энергетических ресурсов, то использование систем ЧПК, в которых требуются дополнительные излучения, возможно только в весьма ограниченной области пространства (как правило, только в нижних положениях луча РЛС и на ограниченных дальностях). Это является недостатком известных технических решений.
Наиболее близким способом защиты от пассивных помех является способ, включающий излучение зондирующих сигналов в зоне обзора РЛС, прием и обнаружение отражений зондирующих сигналов (отражений) от отражателей (целей и объектов, создающих пассивные помехи), запоминание угловых координат луча, соответствующих обнаруженным отражениям, формирование двумерных угловых пакетов обнаруженных отражений, размеры которых зависят от величины эффективной площади рассеяния (ЭПР) отражателей и дальности до них, исключение (бланкирование) отражений в ближней зоне РЛС (Ангельский Р.Д., Шестов И.В. Отечественные зенитные ракетные комплексы: Иллюстрированный справочник. - М., 2002 г., с.150-151).
Поясним понятие «двумерный угловой пакет обнаруженных отражений».
В процессе обзора пространства радиолокационной станцией принятые отражения зондирующих сигналов сравниваются с порогом обнаружения. В результате для каждой дискреты дальности, в каждом положении луча антенны в плоскости угол места (ε) - азимут (β) на выходе порогового устройства присутствует сигнал (отражение обнаружено), если принятое отражение превышает уровень порога, сигнал на выходе порогового устройства отсутствует (отражение не обнаружено), если принятое отражение ниже уровня порога. Положения луча в плоскости ε-β образуют двумерный угловой пакет обнаруженных отражений, если отражения в этих положениях луча обнаружены без пропуска (Кузьмин С.З. Основы теории цифровой обработки радиолокационной информации. - М., Советское радио, 1974, стр.30, рис.1.7). При этом величиной (размером) двумерного углового пакета называют количество положений луча, образующих пакет. Пакет называют единичным, если его величина равна единице, т.е. он состоит из одного положения луча. На фиг.1 приведены примеры двумерных угловых пакетов обнаруженных отражений, отличающиеся количеством направлений луча, в которых произошло обнаружение отражения (т.е. величиной или размером пакета), и конфигурацией (расположением направлений луча в пакете). Положения луча, в которых произошло обнаружение, показаны серым цветом, в положениях луча, обозначенных белым цветом, обнаружений нет. Показаны три вида двумерных угловых пакетов обнаруженных отражений: из одного положения луча (единичный пакет), из двух положений луча и из четырех положений луча.
Известно, что величина двумерного углового пакета обнаруженных отражений зондирующих сигналов при неизменных параметрах РЛС зависит от величины эффективной площади рассеяния (ЭПР) отражателя и от дальности до него. Для отражателей, находящихся на одинаковой дальности, двумерный угловой пакет обнаруженных отражений больше для отражателей с большей ЭПР и меньше для отражателей с меньшей ЭПР. С приближением отражателя к РЛС размеры двумерного углового пакета обнаруженных отражений возрастают (фиг.2). Указанные закономерности изменения величины двумерного углового пакета обнаруженных отражений от ЭПР отражателя и от дальности до него позволяют осуществлять селекцию целей среди других отражателей зондирующего сигнала, дающих пассивную помеху.
Недостатком наиболее близкого способа является высокая вероятность пропуска отражений зондирующего сигнала от цели. Это объясняется тем, что в процессе бланкирования исключаются все отражения (как отражения от целей, так и пассивные помехи) в пределах границ бланка независимо от размеров углового двумерного пакета обнаруженных отражений.
Наиболее близкой по технической сущности к заявляемой является РЛС (фиг.3), содержащая передатчик 1, антенный переключатель 2, антенну 3, приемник 4, пороговое устройство 5, синхронизатор 6, блок оценки угловых координат 7, при этом выход передатчика 1 соединен со входом антенного переключателя 2, вход/выход которого соединен с антенной 3, выход антенного переключателя 2 соединен со входом приемника 4, выход которого соединен со входом порогового устройства 5, выход порогового устройства 5 и координатный выход антенны 3 соединены соответственно с первым и вторым входами блока оценки угловых координат 7, первый и второй выходы синхронизатора 6 соединены с синхровходами передатчика 1 и блока оценки угловых координат 7 соответственно, при этом блок оценки угловых координат 7 включает запоминающее устройство обнаруженных отражений 8, блок формирования двумерных угловых пакетов 9 и вычислитель 10, причем первый и второй входы запоминающего устройства обнаруженных отражений 8 являются первым и вторым входами блока оценки угловых координат 7 соответственно, М выходов запоминающего устройства обнаруженных отражений 8 соединены с М входами блока формирования двумерных угловых пакетов 9, М выходов которого соединены с М входами вычислителя 10, выход вычислителя 10 является выходом блока оценки угловых координат 7 (Патент РФ №2291466).
Работа наиболее близкой к заявляемой РЛС происходит следующим образом. В передатчике 1 по командам синхронизатора 6 (импульсам синхронизации) формируются зондирующие сигналы, которые в процессе обзора пространства с помощью антенны 3 излучаются в пространство. Отражения от целей и пассивные помехи принимаются антенной 3, поступают в приемник 4, где усиливаются. С выхода приемника 4 сигналы поступают на вход порогового устройства 5, где сравниваются с порогом, который задается исходя из допустимой вероятности ложных тревог. Отражения, уровень которых превышает пороговый, проходят на выход порогового устройства 5. Обнаруженные таким образом отражения с выхода порогового устройства 5 и сигналы, пропорциональные угловым координатам луча антенны 3, поступают в блок оценки угловых координат 7. Значения амплитуд обнаруженных отражений с соответствующими угловыми координатами луча по мере движения луча антенны при обзоре пространства записываются в запоминающее устройство обнаруженных отражений 8 и хранятся там. По командам с синхронизатора 6 из запоминающего устройства обнаруженных отражений 8 извлекаются записанные в них данные и подаются в блок формирования двумерных угловых пакетов 9, где происходит формирование угловых пакетов обнаруженных отражений в соответствии с ранее описанным критерием. Амплитуды отражений, образующих пакет, и соответствующие им координаты положений луча поступают на М входов вычислителя 10. В вычислителе 10 вычисляют угловые координаты отражателей зондирующих сигналов в соответствии с правилами, описанными, например, в патенте РФ №2291466.
В наиболее близкой РЛС пассивные помехи и отраженные от цели сигналы не разделяются. Это является недостатком устройства.
Решаемой задачей (техническим результатом), таким образом, является уменьшение количества обнаружений пассивных помех в зоне обзора РЛС при достаточно малой допустимой вероятности пропуска отражений от целей.
Указанный результат достигается тем, что в способе защиты РЛС от пассивных помех, включающем излучение зондирующих сигналов в зоне обзора радиолокационной станции (РЛС), прием и обнаружение отражений от целей и мешающих отражений (пассивных помех), запоминание угловых координат луча, соответствующих обнаруженным отражениям, формирование двумерных угловых пакетов обнаруженных отражений, размеры которых зависят от величины эффективной площади рассеяния (ЭПР) отражателей и дальности до них, согласно изобретению, в зоне обзора РЛС предварительно вычисляют пороговую дальность Rпор, ближе которой вероятность формирования двумерных угловых пакетов обнаруженных отражений размером, равным единице, по отражениям от целей с известной наименьшей из всех возможных в зоне обзора РЛС целей величиной ЭПР не превышает допустимого достаточно малого значения, определяемого допустимой вероятностью пропуска отражения от цели, после чего на дальностях ближе пороговой дальности Rпор двумерные угловые пакеты, размеры которых превышают единицу, принимают за двумерные угловые пакеты, сформированные по отражениям от целей, а двумерные угловые пакеты, равные единице, принимают за двумерные угловые пакеты, сформированные по пассивным помехам.
Технический результат достигается также тем, что в радиолокационной станции, содержащей передатчик, антенный переключатель, антенну, приемник, пороговое устройство, синхронизатор, блок оценки угловых координат, при этом выход передатчика соединен со входом антенного переключателя, вход/выход которого соединен с антенной, выход антенного переключателя соединен со входом приемника, выход которого соединен со входом порогового устройства, выход порогового устройства и координатный выход антенны соединены соответственно с первым и вторым входами блока оценки угловых координат, первый и второй выходы синхронизатора соединены с синхровходами передатчика и блока оценки угловых координат соответственно, при этом блок оценки угловых координат включает запоминающее устройство обнаруженных отражений, блок формирования двумерных угловых пакетов и вычислитель, причем первый и второй входы запоминающего устройства обнаруженных отражений являются первым и вторым входами блока оценки угловых координат соответственно, М выходов запоминающего устройства обнаруженных отражений соединены с М входами блока формирования двумерных угловых пакетов, согласно изобретению в блок оценки угловых координат введены запоминающее устройство и блок сравнения, причем группа из М входов блока сравнения соединена с М выходами блока формирования двумерных угловых пакетов, группа из трех входов блока сравнения соединена с тремя выходами запоминающего устройства, М выходов блока сравнения соединены с М входами вычислителя, выход вычислителя является выходом РЛС.
Суть заявляемого технического решения заключается в следующем.
Как уже отмечалось, величина двумерного углового пакета обнаруженных отражений зависит от ЭПР отражателя и от дальности до него. Для отражателей, находящихся на одинаковой дальности, двумерный угловой пакет обнаруженных отражений больше для отражателей с большей ЭПР и меньше для отражателей с меньшей ЭПР. С приближением отражателя к РЛС размеры двумерного углового пакета обнаруженных отражений возрастают. Указанные закономерности изменения величины двумерного углового пакета обнаруженных отражений от ЭПР отражателя и от дальности до него позволяют осуществлять селекцию целей среди других отражателей зондирующего сигнала, дающих пассивную помеху.
Как правило, характеристики целей, которые могут находится в зоне обзора РЛС, известны заранее. Наиболее опасной из них является цель с наименьшей величиной ЭПР, поскольку она обнаруживается РЛС на наименьшей дальности. По этой цели формируется наименьший двумерный угловой пакет обнаруженных отражений, поэтому поставленная задача решается исходя из ЭПР этой цели.
В заявляемых технических решениях для цели с известной наименьшей из всех возможных в зоне обзора РЛС целей величиной ЭПР предварительно вычисляется пороговая дальность Rпор, ближе которой вероятность формирования двумерных угловых пакетов обнаруженных отражений размером равным единице (РКп=1) не превышает допустимого значения. Указанное допустимое значение вероятности определяется допустимой вероятностью принятия ошибочного решения, при котором цель принимается за пассивную помеху и исключается, т.е. происходит пропуск отражения от цели. Вероятность пропуска отражения от цели может быть выбрана достаточно малой (например, 0.01-0,05).
Пороговая дальность Rпор в заданном направлении зоны обзора связана с вероятностью формирования двумерных угловых пакетов обнаруженных отражений размером равным единице РКп=1 по отражениям от целей с известной наименьшей из всех возможных в зоне обзора РЛС целей величиной ЭПР (для отражений с флюктуирующими амплитудой и фазой):
где
- вероятность обнаружения сигнала, отраженного от цели с известной наименьшей из всех возможных в зоне обзора РЛС целей величиной ЭПР, в заданном (j=0) и соседних к заданному (j=1, …, N) направлениях зоны обзора РЛС соответственно;
Gj - уровень диаграммы направленности антенны, нормированный к ее значению в максимуме луча, в заданном (j=0) и соседних к заданному (j=1, …, N) направлениях зоны обзора РЛС соответственно;
F - вероятность ложной тревоги в заданном направлении зоны обзора РЛС;
R0 - дальность обнаружения цели с известной наименьшей из всех возможных в зоне обзора РЛС целей величиной ЭПР в максимуме луча с вероятностью 0.5.
На дальностях R<Rпор двумерные угловые пакеты, размеры которых превышают единицу (Кп>1), принимают за двумерные угловые пакеты, сформированные по отражениям от целей, а двумерные угловые пакеты, размеры которых равны единице (Kп=1), принимают за двумерные угловые пакеты, сформированные по пассивным помехам, и исключают из дальнейшей обработки.
Указанная селекция целей по величине двумерного углового пакета обнаруженных отражений может быть применена либо во всей зоне обзора РЛС (вкруговую по азимуту, во всей зоне по углу места, на дальностях R≤Rпор) либо в локальных областях (определяемых интервалами по углу места: εнi-εкi, по азимуту: βнi-βкi, по дальности: Rнi-Rкi, где i - номер области, i=1, …, n, n - количество областей, индекс «н» обозначает начальную границу интервала, индекс «к» - конечную границу интервала, причем Rнi≤Rпор, Rкi≤Rпор). Такие области могут быть выделены в зоне обзора в процессе ее осмотра (например, как области с повышенной концентрацией обнаруженных отражений) или задаваться по внешним данным.
Заявляемый способ целесообразно применять в РЛС, в которых шаг перемещения луча при обзоре зоны не более 0.7 от ширины луча ДНА по уровню половинной мощности. В этом случае диапазон изменения размеров двумерных угловых пакетов обнаруженных отражений достаточно широк и позволяет осуществлять описываемую селекцию целей по величине углового пакета.
Изобретение иллюстрируются следующими чертежами:
Фиг.1 - примеры двумерных угловых пакетов обнаруженных отражений. Положения луча при обзоре пространства, в которых произошло обнаружение, показаны серым цветом, в положениях луча, обозначенных белым цветом, обнаружения нет. Показаны три вида двумерных угловых пакетов обнаруженных отражений: единичный пакет (Кп=1), пакет, состоящий из двух положений луча (Кп=2), и пакет, состоящий из четырех положений луча (Кп=4).
Фиг.2 - пример зависимости величины двумерного углового пакета обнаруженных отражений Кп от дальности до отражателя Rн, нормированной к дальности обнаружения отражателя с вероятностью 0.5 в максимуме луча РЛС. Из приведенной зависимости следует, что для известного типа целей всегда может быть определена дальность в зоне обзора РЛС (Rпор), менее которой формируются в основном двумерные угловые пакеты обнаруженных отражений размером более единицы. Единичные пакеты в этой области должны быть исключены как образованные пассивными помехами.
Фиг.3 - радиолокационная станция, наиболее близкая к заявляемой.
Фиг.4 - радиолокационная станция, реализующая заявляемый способ.
Заявляемый способ реализуется с помощью радиолокационной станции, которая содержит (фиг.4) передатчик 1, антенный переключатель 2, антенну 3, приемник 4, пороговое устройство 5, синхронизатор 6, блок оценки угловых координат 7, при этом выход передатчика 1 соединен со входом антенного переключателя 2, вход/выход которого соединен с антенной 3, выход антенного переключателя 2 соединен со входом приемника 4, выход которого соединен со входом порогового устройства 5, выход порогового устройства 5 и координатный выход антенны 3 соединены соответственно с первым и вторым входами блока оценки угловых координат 7, первый и второй выходы синхронизатора 6 соединены с синхровходами передатчика 1 и блока оценки угловых координат 7, блок оценки угловых координат 7 включает запоминающее устройство обнаруженных отражений 8, блок формирования двумерных угловых пакетов 9, вычислитель 10, запоминающее устройство 11 и блок сравнения 12, причем первый и второй входы запоминающего устройства обнаруженных отражений 8 являются первым и вторым входами блока оценки угловых координат 7 соответственно, М выходов запоминающего устройства обнаруженных отражений 8 соединены с М входами блока формирования двумерных угловых пакетов 9, М выходов которого соединены с соответствующими входами группы из М входов блока сравнения 12, а три выхода запоминающего устройства 11 соединены с соответствующими входами группы из трех входов блока сравнения 12, М выходов блока сравнения 12 соединены с М входами вычислителя 10, выход которого является выходом РЛС.
Количество выходов запоминающего устройства обнаруженных отражений 8, входов и выходов блока формирования двумерных угловых пакетов 9, входов вычислителя 10, входов и выходов блока сравнения 12, т.е. значения М, определяется наибольшей возможной величиной двумерного углового пакета обнаруженных отражений Кп. Наибольшая возможная величина Кп для конкретных параметров РЛС (шага перемещения луча при обзоре зоны, мощности зондирующего сигнала) и целей (ЭПР) может быть определена заранее. Так, например, известно, что в РЛС средней дальности действия для шага перемещения луча антенны порядка 0.5 ширины луча антенны по уровню половинной мощности при обнаружении крупных летательных аппаратов формируется двумерный угловой пакет сигналов не более чем из 5 положений луча, т.е. наибольшая возможная величина Кп равна 5. Равна 5 и величина М.
Радиолокационная станция, реализующая заявляемый способ, может быть выполнена с использованием следующих функциональных элементов:
Передатчик 1 - импульсного типа (Справочник по основам радиолокационной техники. - М., 1967, с.278).
Антенный переключатель 2 - выполнен на циркуляторе (Справочник по основам радиолокационной техники. - М., 1967, с.146-147).
Антенна 3 - фазированная антенная решетка с электронным сканированием по одной или обеим угловым координатам и с круговым механическим вращением (Справочник по радиолокации. Под ред. М.Сколника, т.2. - М., Сов. радио, 1977, с.132-138).
Приемник 4 - супергетеродинного типа (Справочник по основам радиолокационной техники. - М., 1967, с.343-344).
Синхронизатор 6 - выполнен на основе задающего генератора и последовательно соединенной с ним цепочки делителей частоты (Радиолокационные устройства (теория и принципы построения). Под ред. В.В.Григорина-Рябова. - М., Сов. радио, 1970, с.602-603).
Цифровые элементы: запоминающее устройство обнаруженных отражений 8, блок формирования двумерных угловых пакетов 9, вычислитель 10, запоминающее устройство 11, блок сравнения 12 - выполнены на стандартных микросхемах (Интегральные микросхемы. Справочник под ред. Б.В.Тарабрина. - М., Радио и связь, 1984).
Блок формирования двумерных угловых пакетов 9 построен на основе известной структурной схемы (Кузьмин С.З. Основы теории цифровой обработки радиолокационной информации. - М., Сов. радио, 1974, стр.38-40, рис.1.11).
Вычислитель 10 - вычислитель, реализующий операцию вычисления угловых координат цели в соответствии, например, с патентом РФ №2291466.
Блок сравнения 12 - вычислитель, реализует функцию сравнения размеров сформированных в блоке 9 двумерных угловых пакетов обнаруженных отражений с единицей в области зоны обзора, ограниченной координатами, поступающими из запоминающего устройства 11.
Радиолокационная станция, реализующая заявляемый способ, работает следующим образом.
В передатчике 1 по командам синхронизатора 6 (импульсам синхронизации) формируются зондирующие сигналы, которые в процессе обзора пространства с помощью антенны 3 излучаются в пространство. Отражения принимаются антенной 3 и поступают в приемник 4, где усиливаются. С выхода приемника 4 сигналы поступают на вход порогового устройства 5, где сравниваются с порогом обнаружения, который задается исходя из допустимой вероятности ложных тревог. Отражения, уровень которых превышает пороговый, проходят на выход порогового устройства 5. Обнаруженные таким образом отражения с выхода порогового устройства 5 и сигналы, пропорциональные угловым координатам луча антенны 3, поступают в блок оценки угловых координат 7. Значения амплитуд отражений с соответствующими угловыми координатами луча по мере движения луча антенны при обзоре пространства записываются в запоминающее устройство обнаруженных отражений 8 и хранятся там. По командам с синхронизатора 6 из запоминающего устройства обнаруженных отражений 8 извлекаются записанные в них данные и подаются в блок формирования двумерных угловых пакетов 9, где происходит объединение обнаруженных отражений в двумерные угловые пакеты, исходя из условия отсутствия пропусков одновременно по обеим угловым координатам (фиг.1). Амплитуды отражений пакета и соответствующие им угловые координаты луча поступают на входы группы из М входов блока сравнения 12. На три входа группы из трех входов блока сравнения 12 поступают предварительно определенные и записанные в запоминающем устройстве 11 значения координат границ областей зоны обзора (по углу места: εнi, εкi, азимуту: βнi, βкi, дальности: Rнi, Rкi), в которых анализируются размеры двумерных угловых пакетов обнаруженных отражений. В блоке сравнения 12 пакеты, расположенные в пределах указанных границ и размер которых равен единице, принимаются за двумерные угловые пакеты, сформированные по пассивным помехам, и исключаются из дальнейшей обработки. Остальные двумерные угловые пакеты обнаруженных отражений (их размеры превышают единицу) принимают за двумерные угловые пакеты, сформированные по отражениям от целей. Они поступают на вход вычислителя 10, где вычисляются угловые координаты целей (в соответствии с патентом РФ №2291466).
Таким образом обеспечивается достижение заявляемого технического результата - уменьшение количества обнаружений пассивных помех в зоне обзора РЛС при достаточно малой допустимой вероятности пропуска отражений от целей.
Изобретения относятся к области радиолокации и могут использоваться в радиолокационных станциях (РЛС) для защиты от пассивных помех в процессе осмотра зоны обзора. Достигаемым техническим результатом является уменьшение количества обнаружений пассивных помех в зоне обзора РЛС при достаточно малой допустимой вероятности пропуска отражений от целей. Технический результат достигается тем, что в зоне обзора РЛС предварительно вычисляют пороговую дальность Rпор, ближе которой вероятность формирования двумерных угловых пакетов обнаруженных отражений размером, равным единице, по отражениям от целей с известной наименьшей из всех возможных в зоне обзора РЛС целей величиной эффективной поверхности рассеяния (ЭПР) не превышает допустимого достаточно малого значения, определяемого допустимой вероятностью пропуска отражения от цели, после чего на дальностях ближе пороговой дальности Rпор двумерные угловые пакеты, размеры которых превышают единицу, принимают за двумерные угловые пакеты, сформированные по отражениям от целей, а двумерные угловые пакеты, равные единице, принимают за двумерные угловые пакеты, сформированные по пассивным помехам. 2 н.п. ф-лы, 4 ил.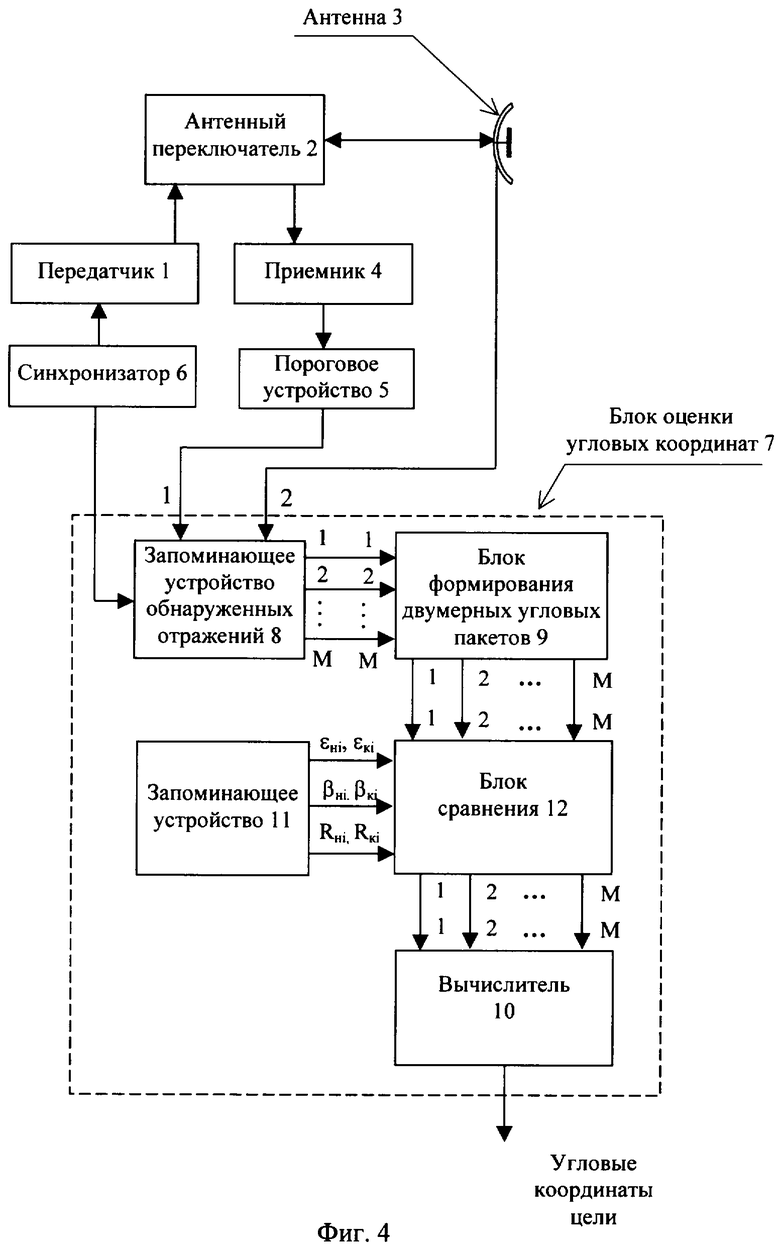
1. Способ защиты от пассивных помех, включающий излучение зондирующих сигналов в зоне обзора радиолокационной станции (РЛС), прием и обнаружение отражений зондирующих сигналов (отражений) от отражателей (целей и объектов, создающих пассивные помехи), запоминание угловых координат луча, соответствующих обнаруженным отражениям, формирование двумерных угловых пакетов обнаруженных отражений, размеры которых зависят от величины эффективной площади рассеяния (ЭПР) отражателей и дальности до них, отличающийся тем, что в зоне обзора РЛС предварительно вычисляют пороговую дальность Rпор, ближе которой вероятность формирования двумерных угловых пакетов обнаруженных отражений размером, равным единице по отражениям от целей с известной наименьшей из всех возможных в зоне обзора РЛС целей величиной ЭПР, не превышает допустимого достаточно малого значения, определяемого допустимой вероятностью пропуска отражения от цели, после чего на дальностях ближе пороговой дальности Rпор двумерные угловые пакеты, размеры которых превышают единицу, принимают за двумерные угловые пакеты, сформированные по отражениям от целей, а двумерные угловые пакеты, равные единице, принимают за двумерные угловые пакеты, сформированные по пассивным помехам.
2. Радиолокационная станция (РЛС), содержащая передатчик, антенный переключатель, антенну, приемник, пороговое устройство, синхронизатор, блок оценки угловых координат, при этом выход передатчика соединен со входом антенного переключателя, вход/выход которого соединен с антенной, выход антенного переключателя соединен со входом приемника, выход которого соединен со входом порогового устройства, выход порогового устройства и координатный выход антенны соединены соответственно с первым и вторым входами блока оценки угловых координат, блок оценки угловых координат включает запоминающее устройство обнаруженных отражений, блок формирования двумерных угловых пакетов и вычислитель, предназначенный для вычисления угловых координат целей, причем первый и второй входы запоминающего устройства обнаруженных отражений являются первым и вторым входами блока оценки угловых координат соответственно, М выходов запоминающего устройства обнаруженных отражений соединены с М входами блока формирования двумерных угловых пакетов, первый выход синхронизатора соединен с синхровходом передатчика, второй выход синхронизатора соединен с синхровходом запоминающего устройства обнаруженных отражений блока оценки угловых координат, отличающаяся тем, что в блок оценки угловых координат введены запоминающее устройство, предназначенное для записи предварительно определенных значений координат границ областей зоны обзора по углу места, азимуту и дальности, и блок сравнения, предназначенный для сравнения сформированных двумерных угловых пакетов обнаруженных отражений с единицей в области зоны обзора, ограниченной координатами, поступающими из запоминающего устройства, причем группа из М входов блока сравнения соединена с М выходами блока формирования двумерных угловых пакетов, группа из трех входов блока сравнения соединена с тремя выходами запоминающего устройства, М выходов блока сравнения соединены с М входами вычислителя, выход вычислителя является выходом РЛС.
| АНГЕЛЬСКИЙ Р.Д | |||
| и др | |||
| Отечественные зенитные ракетные комплексы: Иллюстрированный справочник | |||
| Топчак-трактор для канатной вспашки | 1923 |
|
SU2002A1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ ОБЪЕКТА И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2005 |
|
RU2291466C1 |
| RU 2006102904 A, 20.08.2007 | |||
| СПОСОБ ПОДАВЛЕНИЯ ПАССИВНЫХ ПОМЕХ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2002 |
|
RU2227308C2 |
| СПОСОБ ЗАЩИТЫ РАДИОЛОКАЦИОННОЙ СТАНЦИИ С ФАЗИРОВАННОЙ АНТЕННОЙ РЕШЕТКОЙ ОТ ПАССИВНЫХ ПОМЕХ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1990 |
|
RU2237906C2 |
| WO 2007069253 A1, 21.06.2007 | |||
| US 2007109175 A1, 17.05.2007 | |||
| WO 2006078314 A2, 27.07.2006. | |||

