Изобретение относится к области радиолокации и может быть использовано при обнаружении траектории объекта, отделившегося от объекта-носителя, в обзорных радиолокационных станциях (РЛС) с фазированной антенной решеткой (ФАР).
Известно, что боевые самолеты (объекты-носители), как правило, имеют на борту такие боевые средства (отделяющиеся объекты) как баллистические или крылатые ракеты и снаряды, неуправляемые и управляемые бомбы. Существуют ракеты (объекты-носители), оснащенные боеголовками, способными отделяться от носителя и совершать самостоятельный, в том числе управляемый, полет.
Отделившиеся объекты, как правило, имеют большую, чем объект-носитель, максимальную скорость, меньшую эффективную площадь рассеяния (ЭПР), часто являются высокоточным оружием. В связи с этим перед радиолокационной станцией стоит задача как можно раньше осуществлять обнаружение и сопровождение траекторий отделившихся объектов для того, чтобы своевременно выдавать их координаты для последующего уничтожения.
В описании использованы следующие известные термины.
Строб захвата траектории - область пространства с центром в точке обнаружения объекта, в которой с достаточно высокой вероятностью будет находиться объект, движущийся в неизвестном направлении с максимально возможной для него скоростью, через время, равное периоду обращения к объекту в стробе захвата траектории (Кузьмин С.З. Основы теории цифровой обработки радиолокационной информации. - М., Сов. радио, 1974, с.199).
Строб подтверждения захвата траектории - область в пространстве, в которой с достаточно высокой вероятностью будет находиться объект, движущийся в направлении и со скоростью, экстраполированными на основе предыдущих данных об объекте, через время, равное периоду обращения к объекту в стробе подтверждения захвата траектории (там же).
Известен способ обнаружения (захвата) траектории объекта, отделившегося от сопровождаемого РЛС в стробе сопровождения объекта-носителя, включающий осмотр зоны обзора РЛС, обнаружение отделившегося объекта, повторный и последующие осмотры зоны обзора РЛС через периоды обзора зоны, принятие решения об обнаружении траектории отделившегося объекта (А.Фарина, Ф.Студер. Цифровая обработка радиолокационной информации. Сопровождение целей. - М., Радио и связь, 1993, с.25-30).
Недостатками известного способа являются значительное перепутывание траекторий объектов, связанное с тем, что их обнаружение осуществляется не в стробах, а при регулярном обзоре зоны, а также большое количество ложных траекторий, формирующихся по пассивным помехам. Все это значительно уменьшает пропускную способность РЛС.
Наиболее близким к заявляемому является способ радиолокационного обнаружения траектории объекта, отделившегося от объекта-носителя, включающий сопровождение траектории объекта-носителя в стробе сопровождения объекта-носителя с периодом обращения к нему Тсн, первичное обнаружение отделившегося объекта в стробе сопровождения траектории объекта-носителя, формирование строба захвата траектории отделившегося объекта и осмотр его через интервал времени Тзо, формирование и осмотр через интервал времени Тпзо последовательно первого, второго, ..., n-го стробов подтверждения захвата траектории отделившегося объекта (Кузьмин С.З. Основы теории цифровой обработки радиолокационной информации. - М., Сов. радио, 1974, с.198-200).
Обнаружение (захват) траектории объекта в наиболее близком способе осуществляется в соответствии с критерием вида 2/m+1/n. При этом первая часть критерия (2/т) считается критерием захвата траектории, вторая (1/n) - критерием подтверждения захвата траектории. Захват траектории осуществляется в стробах захвата траектории, осматриваемых через интервал времени обращения к объекту Тзо после его первичного обнаружения. При этом измеряется радиальная скорость и направление движения объекта. Подтверждение захвата траектории осуществляется в стробах подтверждения захвата траектории, осматриваемых с интервалами времени обращения к объекту Тпзо. (Кузьмин С.З. Основы теории цифровой обработки радиолокационной информации. - М., Сов. радио, 1974, с.280).
Таким образом, траектория объекта считается обнаруженной (захваченной), если объект обнаружен не менее двух раз в m последовательных попытках и затем еще хотя бы один раз в n следующих последовательных попытках. Обнаруженная траектория далее сопровождается с периодом обращения к объекту Тсо.
На практике значение m часто берут равным 2, т.е. применяют критерий вида 2/2+1/n. При этом траектория отделившегося объекта считается обнаруженной, если отраженный сигнал, обнаруженный в стробе сопровождения траектории сопровождаемого объекта-носителя, обнаружен также в стробе захвата его траектории (т.е. два обнаружения при двух возможных попытках) и в одном из n стробов подтверждения захвата траектории.
Таким образом, наиболее близкий способ позволяет обнаруживать траекторию отделившегося объекта, обнаруженного в стробе сопровождения траектории объекта-носителя, но он имеет следующие недостатки.
Во-первых, размеры строба сопровождения объекта-носителя рассчитываются без учета возможности отделения объекта. Поэтому за период сопровождения объекта-носителя Тсн возможен выход отделившегося объекта из строба сопровождения объекта-носителя. В результате отделившийся объект и его траектория могут быть потеряны.
Во-вторых, поскольку вид средств воздушного нападения, применяемых противником, заранее предсказать практически невозможно, то размеры строба захвата траектории отделившегося объекта должны рассчитываться исходя из наиболее скоростных отделяющихся объектов, т.е. должны быть достаточно большими. Однако при обнаружении высокоскоростных отделяющихся объектов размеры стробов захвата в ряде случаев оказываются столь большими, что их осмотр из-за ограниченных временных и энергетических ресурсов обзорных РЛС становится практически невозможным. Это приводит к резкому снижению пропускной способности РЛС.
Задача усложняется присутствием в зоне обзора РЛС источников пассивных помех. Они могут быть как естественного происхождения (например, метеообразования), так и созданными умышленно (например, дипольные отражатели, намеренно разбрасываемые противником с целью скрыть присутствие своих средств нападения и перегрузить систему обработки радиолокационной информации РЛС). Наличие источников пассивных помех приводит к тому, что они в стробе сопровождения траектории сопровождаемого объекта-носителя принимаются за отделившиеся объекты и по ним формируются траектории. Обнаруженные при этом траектории являются ложными. Большинство таких траекторий через некоторое время сбрасывается с сопровождения, но они отвлекает ресурсы системы обработки радиолокационной информации РЛС, снижая пропускную способность РЛС.
Таким образом, недостатками наиболее близкого технического решения являются значительные затраты временных и энергетических ресурсов РЛС при обнаружении траекторий отделившихся объектов, большой период времени, требующийся для обнаружения траектории отделившегося объекта, а также большое количество ложных траекторий, формируемых по пассивным помехам при обнаружении траектории отделившегося объекта.
Заявляемое изобретение направлено на устранение указанных недостатков.
Решаемой задачей (техническим результатом), таким образом, является уменьшение затрат временных и энергетических ресурсов РЛС при обнаружении траектории объекта, отделившегося от объекта-носителя, уменьшение времени, требующегося для обнаружения траектории отделившегося объекта, а также уменьшение количества ложных траекторий, формируемых по пассивным помехам при обнаружении траектории отделившегося объекта.
Указанный технический результат достигается тем, что в способе радиолокационного обнаружения траектории объекта, отделившегося от объекта-носителя, включающем сопровождение траектории объекта-носителя в стробе сопровождения объекта-носителя с периодом обращения к нему Тсн, первичное обнаружение отделившегося объекта в стробе сопровождения траектории объекта-носителя, формирование строба захвата траектории отделившегося объекта и осмотр его через интервал времени Тзо, формирование и осмотр через интервал времени Тпзо последовательно первого, второго,..., n-го стробов подтверждения захвата траектории отделившегося объекта, согласно изобретению первичное обнаружение отделившегося объекта проводят в стробе сопровождения траектории объекта-носителя, увеличенном с учетом возможности отделения от него объекта, после первичного обнаружения отделившегося объекта формируют строб подтверждения обнаружения отделившегося объекта, в котором осуществляют повторное обращение к отделившемуся объекту через интервал времени Тпо значительно меньший, чем интервал времени Тзо, затем, если в стробе подтверждения обнаружения отделившегося объекта произошло обнаружение, осуществляют формирование и осмотр упомянутого строба захвата траектории отделившегося объекта через интервал времени Тзо меньший, чем период обращения к объекту-носителю в стробе сопровождения объекта-носителя Тсн, после чего проводят упомянутые формирование и осмотр последовательно первого, второго,..., n-го стробов подтверждения захвата траектории отделившегося объекта, при обнаружении в каждом из этих стробов отделившегося объекта принимают решение об обнаружении траектории отделившегося объекта, если же в стробе подтверждения обнаружения отделившегося объекта обнаружение не произошло, то принимают решение об отсутствии отделившегося объекта.
Указанный результат достигается также тем, что:
- увеличенные размеры строба сопровождения объекта-носителя вычисляют по формулам:
по угловым координатам: 
по дальности: 
где ΔαH -размер строба сопровождения объекта-носителя по углу места (ΔαH=ΔεH) или по азимуту (ΔαH=ΔβH);
σαH - среднеквадратические значения ошибок измерения угловой координаты объекта-носителя по углу места (σαH=σεH) или по азимуту (σαH=σβH);
σRн - среднеквадратические значения ошибок измерения дальности объекта-носителя Rн;
i - текущий номер обращения к объекту-носителю;
Vαomax - максимальные составляющие скорости отделившегося объекта по углу места (Vαomax=Vεomax) или по азимуту (Vαomax=Vβomax);
VRomax - максимальная составляющая скорости отделившегося объекта по координате дальность Ro;
Тсн - период обращения к объекту-носителю при сопровождении его траектории;
ΔRHDop и ΔR0Dop - ошибки измерения дальности до объекта-носителя и отделившегося объекта соответственно за счет эффекта Доплера:

где τи, f0, Δf- длительность, несущая частота, ширина спектра частот сигнала РЛС соответственно;
VrH и Vr0 - радиальные скорости объекта-носителя и отделившегося объекта, соответственно.
- размеры строба подтверждения обнаружения отделившегося объекта вычисляют по формулам:
по угловым координатам: 
по дальности: 
где Δα - размер строба сопровождения объекта-носителя по углу места (Δα=Δε) или по азимуту (Δα=Δβ);
σαо - среднеквадратические значения ошибок измерения угловой координаты отделившегося объекта по углу места (σαo=σεо) или азимуту (σαо=σβо);
σRo - среднеквадратические значения ошибок измерения дальности R0 отделившегося объекта;
Vαomax - максимальные составляющие скорости отделившегося объекта по углу места (Vαomax=Vβomax) или по азимуту (Vαomax=Vβomax);
VRomax- максимальная составляющая скорости отделившегося объекта по координате дальность R0.
Суть заявляемого технического решения заключается в следующем.
Обнаружение объекта, отделившегося от объекта-носителя, осуществляется в стробе сопровождения объекта-носителя.
Для того, чтобы исключить выход отделившегося объекта из строба сопровождения объекта-носителя за период сопровождения Тсн, размеры стробов сопровождения объекта-носителя по угловым координатам и по дальности должны быть рассчитаны в соответствии с формулами (1) и (2).
Как известно, в стробе сопровождения объекта-носителя осуществляется «привязка» обнаруженных сигналов к траектории объекта-носителя (Кузьмин С.З. Основы теории цифровой обработки радиолокационной информации. - М., Сов. радио, 1974, с.199). В процессе привязки проводится селекция обнаруженных сигналов в стробе сопровождения. Обычно данная операция проводится с применением «пакетирования», т.е. формирования угловых пакетов (или «пачек», как принято в источнике: Кузьмин С.З. Основы теории цифровой обработки радиолокационной информации. - М., Сов. радио, 1974, с.243). Обнаружения в стробе, образующие угловой пакет величиной, соответствующей дальности до объекта-носителя (величина пакета - количество положений луча без пропусков обнаружения по одной или по обеим угловым координатам), считаются принадлежащими сопровождаемому объекту-носителю. По сформированному угловому пакету вычисляют координаты объекта-носителя, определяют параметры его траектории, осуществляют экстраполяцию параметров траектории и другие операции сопровождения траектории. Обнаружения, не вошедшие в пакет, сформированный по объекту-носителю, классифицируются как объекты, отделившиеся от объекта-носителя.
Первое обнаружение отделившегося объекта в стробе сопровождения объекта-носителя далее будем называть первичным обнаружением отделившегося объекта.
В заявляемом техническом решении после первичного обнаружения отделившегося объекта проводится повторное к нему обращение в «стробе подтверждения обнаружения отделившегося объекта».
Строб подтверждения обнаружения отделившегося объекта назначается через весьма малый интервал времени Тпо после первичного обнаружения отраженного сигнала в стробе сопровождения траектории сопровождаемого объекта-носителя (через 0.1-0.5 с). За такой интервал времени отделившийся объект, находящийся в начальной стадии отделения, практически не изменит своего положения относительно объекта-носителя, поэтому угловые размеры строба подтверждения обнаружения отделившегося объекта должны быть весьма небольшими, как правило, не более одного луча РЛС.
Это повторное «быстрое» обращение к объекту в стробе подтверждения обнаружения отделившегося объекта позволяет однозначно подтвердить или опровергнуть наличие объекта, отделившегося от носителя. Действительно, если объект, первично обнаруженный в стробе сопровождения сопровождаемого объекта-носителя, классифицированный при первичном его обнаружении как отделившийся от носителя объект, обнаружен и при повторном «быстром» обращении к нему, значит, он движется в окрестности объекта-носителя со скоростью, близкой к его скорости. Такой объект, скорей всего, находится в начальной стадии своего самостоятельного движения после отделения от объекта-носителя, т.е. является отделившимся объектом.
После того как обнаружение отделившегося объекта подтверждено, для измерения его скорости и направления движения рассчитывается и осматривается строб захвата его траектории. Поскольку отделившийся объект и объект-носитель первое время после разделения движутся с близкими параметрами, возможно перепутывание их траекторий. Для уменьшения перепутывания траекторий в заявляемом техническом решении строб сопровождения объекта-носителя и строб захвата траектории отделившегося объекта не пересекаются в пространстве (фиг.1). Для этого интервал времени обращения к объекту в стробе захвата Тзо выбирается отличающимся от периода обращения к объекту в стробе сопровождения объекта-носителя Тсн. Так как скорость отделившегося объекта может быть весьма значительной, целесообразно выбирать Тзо меньшим, чем Тсн.
Если в стробе подтверждения обнаружения отделившегося объекта обнаружение не произошло, это означает, что первичное обнаружение в стробе сопровождения сопровождаемого объекта было вызвано случайными отражениями (от атмосферных неоднородностей, от дипольных отражателей, намеренно разбрасываемых противником, от других источников пассивных помех) или шумами приемника РЛС.
Таким образом, повторное «быстрое» обращение к объекту в стробе подтверждения обнаружения отделившегося объекта позволяет значительно уменьшить время обнаружения траектории отделившегося объекта, что, во-первых, позволяет уменьшить размеры строба захвата и, следовательно, уменьшить затраты временных и энергетических ресурсов на обнаружение траектории отделившегося объекта, во-вторых, обеспечить целеуказание на достаточно большой дальности от РЛС, что чрезвычайно важно для эффективного поражения таких объектов.
Кроме того, повторное «быстрое» обращение к объекту в стробе подтверждения обнаружения отделившегося объекта позволяет значительно уменьшить количество ложных траекторий, формируемых по пассивным помехам.
Поясним последнее утверждение.
Известно, что распределенные в пространстве пассивные помехи обладают достаточно большим корреляционным интервалом. Поэтому при облучении источников пассивных помех зондирующим сигналом с интервалом времени меньшим, чем корреляционный интервал, большинство сигналов, отраженных от них, будет обнаружено. В дальнейшем эти обнаруженные отраженные сигналы становятся началом новых (ложных) траекторий. При выборе интервала времени обращения к отделившемуся объекту в стробе подтверждения обнаружения отделившегося объекта целесообразно исходить из допустимого количества обнаружений пассивных помех (и, соответственно, количества ложных траекторий, сформированных по ним), равного, например, 1-5% от общего количества обнаружений в зоне обзора РЛС.
Таким образом, повторное обращение (в стробе подтверждения обнаружения отделившегося объекта) к объектам, обнаруженным в стробе сопровождения траектории сопровождаемого объекта-носителя, позволяет без ухудшения вероятности обнаружения траекторий отделившихся объектов эффективно уменьшать количество траекторий, формируемых по пассивным помехам.
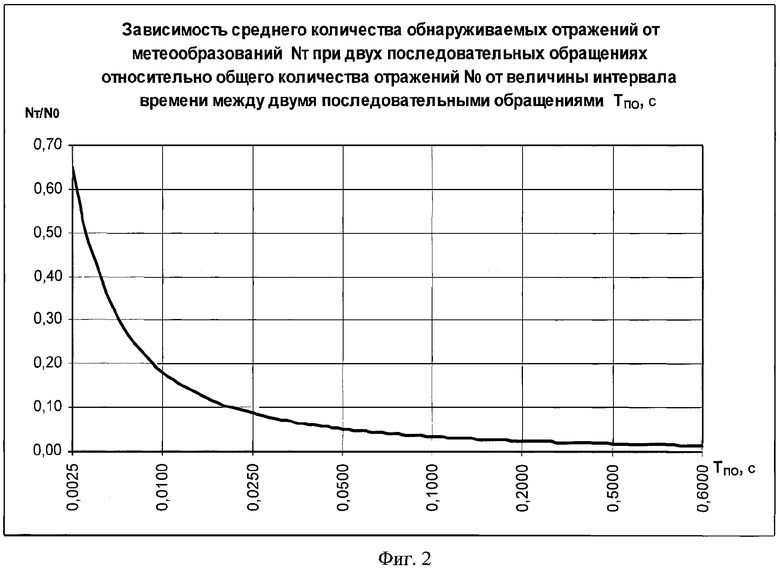
Последнее подтверждают и эксперименты, проведенные на обзорной РЛС сантиметрового диапазона волн за длительный период времени (несколько лет). Так, определена зависимость среднего количества обнаруживаемых отражений от метеообразований NT при двух последовательных обращениях к ним относительно общего количества отражений N0 от величины интервала времени между двумя последовательными обращениями Тпо (фиг.2).
С учетом допустимого среднего количества обнаружений пассивных помех (количества траекторий, сформированных по пассивным помехам), из приведенной зависимости может быть определен минимальный интервал времени между обращениями к отделившемуся объекту при первичном его обнаружении в стробе сопровождения объекта-носителя и в стробе подтверждения обнаружения отделившегося объекта. Так, для допустимого количества ложных траекторий, формируемых по отражениям от пассивных помех, равным 5% от всего количества отражений в регулярном осмотре зоны обзора РЛС, минимальный интервал времени обращения к объекту Тпо должен быть установлен около 0.1 с.
Если предполагается сопровождать не самые высокоскоростные отделившиеся объекты, то может быть установлен несколько больший интервал времени Тпо обращения к отделившемуся объекту в стробе подтверждения обнаружения его траектории. При этом количество траекторий, формируемых пассивным помехам (ложных траекторий), еще более уменьшится.
Допустимым диапазоном при выборе интервала времени обращения к отделившемуся объекту в стробах подтверждения обнаружения отделившегося объекта Тпо следует считать 0.1-0.5 с.
Таким образом достигается заявляемый технический результат.
Изобретение иллюстрируется следующими чертежами.
Фиг.1 - взаимное расположение стробов сопровождения объекта-носителя, строба подтверждения обнаружения отделившегося объекта и строба захвата траектории отделившегося объекта.
Фиг.2 - зависимость среднего количества обнаруживаемых отражений от метеообразований NT при двух последовательных обращениях к ним относительно общего количества отражений N0 от величины интервала времени между двумя последовательными обращениями Тпо.
Фиг.3 - блок-схема обзорной РЛС, реализующей заявляемый способ.
Обзорная радиолокационная станция, реализующая заявляемый способ, содержит (фиг.3) антенну 1, устройство управления лучом 2, выход которого соединен с антенной 1, последовательно соединенные передатчик 3, антенный переключатель 4, приемник 5 и вычислитель 6, выход которого соединен со входом устройства управления лучом 2, а также синхронизатор 7, при этом сигнальный вход/выход антенны 1 соединен со входом/выходом антенного переключателя 4, а координатный ее выход - со вторым входом вычислителя 6, четыре выхода синхронизатора 7 соединены соответственно с синхровходами устройства управления лучом 2, передатчика 3, приемника 5 и вычислителя 6 (Монзинго Р.А., Миллер Т.У. Адаптивные антенные решетки: Введение в теорию: Пер с англ. - М., Радио и связь, 1986, стр.19).
Указанная РЛС может быть выполнена на следующих функциональных элементах.
Антенна 1 - ФАР с двумерным электронным сканированием по углу места и азимуту (Справочник по радиолокации. Под ред. М.Сколника, т.2. - М., Сов. радио, 1977, с.138).
Устройство управления лучом 2 - цифровой вычислитель, реализующий известный алгоритм расчета распределения состояний фазовращателей в полотне ФАР и формирования луча в заданном направлении по углу места (Справочник по радиолокации. Под ред. М.Сколника, т.2. - М., Сов. радио, 1977, с.141-143).
Передатчик 3 - многокаскадный импульсный передатчик на клистроне (А.М.Педак и др. Справочник по основам радиолокационной техники. Под редакцией В.В. Дружинина. Военное издательство, 1967, с.278-279, рис.7.2).
Антенный переключатель 4 - балансный антенный переключатель на базе циркулятора (А.М.Педак и др. Справочник по основам радиолокационной техники. Под редакцией В.В.Дружинина. Военное издательство, 1967, с.166-168).
Приемник 5 - супергетеродинный приемник (А.М.Педак и др. Справочник по основам радиолокационной техники. Под редакцией В.В. Дружинина. Военное издательство, 1967, с.343-344, рис.8.1).
Вычислитель 6 - цифровой вычислитель. В вычислителе 6 реализуется известный способ обнаружения траектории объекта (Кузьмин С.З. Основы теории цифровой обработки радиолокационной информации. - М., Сов. радио, 1974, с.285-287).
Синхронизатор 7 - выполнен на основе задающего генератора и последовательно соединенной с ним цепочки делителей частоты (Радиолокационные устройства (теория и принципы построения). Под ред. В.В.Григорина-Рябова. - М., Сов. радио, 1970, с.602-603).
Рассмотрим работу обзорной РЛС (фиг.3), реализующей заявляемый способ при критерии обнаружения траектории отделившегося объекта 2/2+1/2.
Скорость отделившегося объекта полагаем неизвестной, т.е. отделившийся объект может быть как невысокоскоростным, так высокоскоростным.
Принимая допустимым среднее количество ложных траекторий, формируемых по пассивным помехам, на уровне 5% от всего количества отражений в зоне обзора РЛС, минимальный интервал времени обращения к отделившемуся объекту в стробе подтверждения обнаружения отделившегося объекта Тпо на основании зависимости фиг.2 установим равным 0.1 с.
По команде от синхронизатора 7 в устройстве управления лучом 2 рассчитывается распределение состояний фазовращателей в полотне антенны 1 и луч антенны 1 устанавливается в заданном направлении пространства. Сформированный в передатчике 3 высокочастотный зондирующий сигнал через антенный переключатель 4 подается в антенну и излучается. Отраженный сигнал, принимается антенной 1, через антенный переключатель 4 поступает в приемник 5, где преобразуется на видеочастоту, и затем подается в вычислитель 6, где осуществляются операции по обработке поступающей информации при обнаружении траектории объекта-носителя. Период обращения к объекту-носителю в стробах сопровождения при этом равен Тсн.
В вычислителе 6 производится также и объединение обнаруженных в стробе сопровождения объекта-носителя сигналов в двумерные угловые пакеты обнаруженных сигналов. При этом, если в стробе сопровождения объекта-носителя, кроме углового пакета по сопровождаемому объекту сформирован еще один или более угловых пакетов, то вновь сформированные угловые пакеты считают принадлежащими отделившимся объектам, т.е. принимается решение о первичном обнаружении отделившихся объектов.
Для каждого отделившегося объекта, обнаруженного в стробе сопровождения объекта-носителя, рассчитываются границы (в соответствии с формулами (3) и (4)) и осматриваются через интервал времени Тпо стробы подтверждения обнаружения отделившегося объекта с центрами в точках с координатами их первичного обнаружения. В процессе осмотра указанных стробов координаты положений луча в пределах рассчитанных границ строба с выхода вычислителя 6 подаются в устройство управления лучом 2, и луч антенны последовательно устанавливается в эти направления. По командам синхронизатора 7, подаваемым на передатчик 3, излучаются зондирующие сигналы. Отраженные сигналы принимаются антенной 1, поступают в приемник 5 и далее - в вычислитель 6.
В вычислителе 6 анализируется содержимое стробов подтверждения обнаружения отделившегося объекта. Если отделившийся объект, обнаруженный в стробе сопровождения траектории объекта-носителя, обнаруживается и в стробе подтверждения обнаружения отделившегося объекта, то далее осуществляется обнаружение его траектории. Для этого рассчитываются границы и через период времени Тзо осматривается строб захвата траектории и осуществляются дальнейшие операции по обнаружению траектории отделившегося объекта.
Если отделившийся объект, обнаруженный в стробе сопровождения траектории объекта-носителя, в стробе подтверждения обнаружения отделившегося объекта не обнаружен, то обнаружение отделившегося объекта считается ложным, и дальнейшие операции по обнаружению его траектории не проводятся.
Таким образом, в обзорной РЛС, реализующей заявляемый способ, при обнаружении траектории объекта, отделившегося от сопровождаемого объекта-носителя, достигается уменьшение количества ложных траекторий, формируемых по пассивным помехам, а при обнаружении траектории высокоскоростного отделившегося объекта, кроме того, достигается и значительное уменьшение затрат временных и энергетических ресурсов РЛС при захвате траекторий высокоскоростных отделившихся объектов.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБНАРУЖЕНИЯ ТРАЕКТОРИИ ОБЪЕКТА | 2005 |
|
RU2297014C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ТРАЕКТОРИИ ОБЪЕКТА | 2009 |
|
RU2427002C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ТРАЕКТОРИИ ОБЪЕКТА | 2009 |
|
RU2413239C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ТРАЕКТОРИИ ОБЪЕКТА И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2006 |
|
RU2347236C2 |
| СПОСОБ РАДИОЛОКАЦИОННОГО СОПРОВОЖДЕНИЯ ТРАЕКТОРИИ ОБЪЕКТА | 2005 |
|
RU2304789C1 |
| СПОСОБ СОПРОВОЖДЕНИЯ ТРАЕКТОРИИ ЦЕЛИ | 2012 |
|
RU2530547C2 |
| СПОСОБ ОБНАРУЖЕНИЯ И СОПРОВОЖДЕНИЯ ТРАЕКТОРИИ ОБЪЕКТА И ОБЗОРНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2005 |
|
RU2292563C2 |
| СПОСОБ СОПРОВОЖДЕНИЯ ТРАЕКТОРИИ ЦЕЛИ | 2011 |
|
RU2463622C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ ОБЪЕКТА В ПРОЦЕССЕ ЗАХВАТА И СОПРОВОЖДЕНИЯ ТРАЕКТОРИИ В СТРОБАХ | 2006 |
|
RU2306580C1 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ОБЗОРА ПРОСТРАНСТВА | 2011 |
|
RU2478981C2 |

Изобретение относится к области радиолокации и может быть использовано при обнаружении траектории объекта, отделившегося от сопровождаемого объекта-носителя, в обзорных радиолокационных станциях (РЛС) с фазированной антенной решеткой. Достигаемым техническим результатом является уменьшение затрат временных и энергетических ресурсов РЛС при обнаружении траектории объекта, отделившегося от объекта-носителя, уменьшение времени, требующегося для обнаружения траектории отделившегося объекта, а также уменьшение количества ложных траекторий, формируемых по пассивным помехам при обнаружении траектории отделившегося объекта. Технический результат достигается тем, что через небольшой интервал времени после первичного обнаружения отделившегося объекта, осуществляют повторное обращение к нему в стробе подтверждения обнаружения отделившегося объекта, после чего, если отраженный сигнал в стробе подтверждения обнаружения отделившегося объекта обнаружен, то осуществляют дальнейшие операции по обнаружению траектории отделившегося объекта, если же отраженный сигнал в стробе подтверждения обнаружения отделившегося объекта не обнаружен, то принимают решение об отсутствии отделившегося объекта и дальнейшие операции по обнаружению его траектории не проводят. 2 з.п. ф-лы, 3 ил.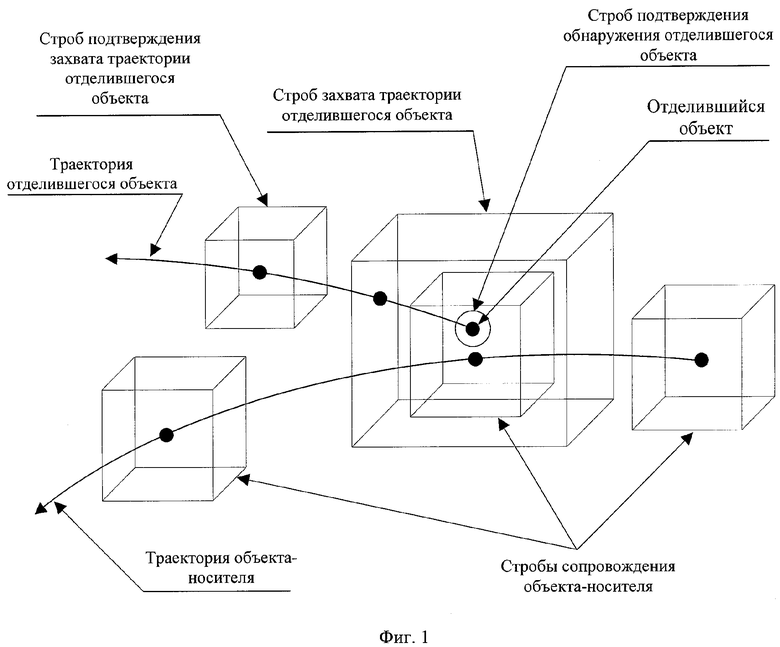
по угловым координатам  ;
;
по дальности 
где ΔαH - размер строба сопровождения объекта-носителя по углу места (ΔαH=ΔεH) или по азимуту (ΔαH=ΔβH);
σαн - среднеквадратические значения ошибок измерения угловой координаты объекта-носителя по углу места (σαH=σεН) или по азимуту (σαН=σβH);
σRн - среднеквадратические значения ошибок измерения дальности объекта-носителя Rн;
i - текущий номер обращения к объекту-носителю;
Vαomax - максимальные составляющие скорости отделившегося объекта по углу места (Vαomax=Vεomax) или по азимуту (Vαomax=Vβomax);
УRomax - максимальная составляющая скорости отделившегося объекта по координате дальность R0;
Тсн - период обращения к объекту-носителю при сопровождении его траектории;
ΔRHDop и ΔR0Dop - ошибки измерения дальности до объекта-носителя и отделившегося объекта соответственно за счет эффекта Доплера:
 ,
,
где τи, f0, Δf - длительность, несущая частота, ширина спектра частот сигнала РЛС соответственно;
УrH и Vr0 - радиальные скорости объекта-носителя и отделившегося объекта соответственно.
по угловым координатам: 
по дальности: ΔR=2(VRomaxTПО+3σRo),
где Δα-размер строба сопровождения объекта-носителя по углу места (Δα=Δα) или по азимуту (Δα=Δβ);
σао - среднеквадратические значения ошибок измерения угловой координаты отделившегося объекта по углу места (σαо=σεo) или азимуту (σαo=σβo);
σRo - среднеквадратические значения ошибок измерения дальности R0 отделившегося объекта;
Vαomax - максимальные составляющие скорости отделившегося объекта по углу места (Vαomax=Vεomax) или по азимуту (Vαomax=Vβomax);
VRomax - максимальная составляющая скорости отделившегося объекта по координате дальность R0.
| КУЗЬМИН С.З | |||
| Основы теории цифровой обработки радиолокационной информации | |||
| - М.: Советское Радио, 1974, с.198-200 | |||
| УСТРОЙСТВО СОПРОВОЖДЕНИЯ ТРАЕКТОРИИ ДВИЖУЩИХСЯ ОБЪЕКТОВ | 1994 |
|
RU2079150C1 |
| СПОСОБ РАДИОЛОКАЦИОННОГО СОПРОВОЖДЕНИЯ ТРАЕКТОРИИ ОБЪЕКТА | 2005 |
|
RU2304789C1 |
| СПОСОБ СОПРОВОЖДЕНИЯ МАНЕВРИРУЮЩЕЙ ВОЗДУШНОЙ ЦЕЛИ | 1993 |
|
RU2048684C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И СОПРОВОЖДЕНИЯ ОБЪЕКТА | 2002 |
|
RU2218581C2 |
| Клапан | 1990 |
|
SU1789814A1 |
| WO 2005062984 А2, 14.07.2005 | |||
| US 6147638 А, 14.11.2000. | |||

