Область техники, к которой относится изобретение
В общем настоящее изобретение относится к способам и устройствам для исследования подземных пластов. Более конкретно, настоящее изобретение относится к способам и устройствам для управления сейсмическими источниками.
Уровень техники
В течение нескольких последних десятилетий анализ подземных пластов обеспечивает возможность более эффективной добычи нефти и газа. В последние годы нефтепоисковые работы осуществляются на все более глубоких уровнях воды. По мере увеличения глубины воды и удлинения пробуриваемых скважин подземные пласты часто становятся очень сложными. Для содействия более эффективной добыче нефти часто желательно синтезировать вертикальный сейсмический профиль.
Получение вертикального сейсмического профиля (ВСП) относится к классу скважинных сейсмических измерений, используемых для нахождения корреляции между данными поверхностных сейсмических приемников и кабельного каротажа. Вертикальные сейсмические профили могут быть использованы для привязки поверхностных сейсмических данных к скважинным данным с обеспечением полезной привязки к измеряемым глубинам. Обычно вертикальные сейсмические профили позволяют получать данные с более высоким разрешением, чем обеспечивают поверхностные сейсмические профили. Вертикальные сейсмические профили дают возможность преобразовывать сейсмические данные в нуль-фазовые данные, а также позволяют отличать однократные отраженные волны от многократных волн. Кроме того, вертикальный сейсмический профиль часто используют для анализа участков пласта впереди бурового долота.
В узком определении вертикальный сейсмический профиль относится к результатам измерений, осуществляемым в вертикальном стволе скважине путем использования акустических приемников внутри ствола скважины и сейсмического источника на поверхности вблизи скважины. Однако в более общем смысле, употребляемом в настоящей заявке, вертикальные сейсмические профили изменяются в зависимости от конфигурации скважины, числа и местоположения источников и акустических приемников и от того, как они размещены. Тем не менее, вертикальное сейсмическое профилирование означает размещение в стволе скважины, по меньшей мере, нескольких приемников. При получении большей части вертикальных сейсмических профилей используют поверхностный сейсмический источник, который обычно представляет собой вибратор на суше или воздушную пушку в морских условиях.
Имеются различные конфигурации вертикальных сейсмических профилей, в том числе вертикальный сейсмический профиль с нулевым удалением источника от приемников, вертикальный сейсмический профиль с удалением источника от буровой установки, вертикальный сейсмический профиль с перемещением источника, вертикальный сейсмический профиль с вертикальным падением луча, вертикальный сейсмический профиль вблизи солевых отложений, вертикальный сейсмический профиль с многократным удалением источника и вертикальный сейсмический профиль с использованием шума бурового долота или с получением сейсмических данных в процессе бурения. Сейсмические каротажные диаграммы подобны вертикальному сейсмическому профилю в том, что акустические приемники размещены в стволе скважины, а поверхностный источник используется для возбуждения акустического сигнала. Однако вертикальный сейсмический профиль является более детализированным, чем сейсмическая каротажная диаграмма. При вертикальном сейсмическом профилировании приемники обычно расположены более близко друг к другу, чем при сейсмическом каротаже; сейсмические каротажные диаграммы могут включать в себя интервалы измерений, отстоящие на сотни метров. Кроме того, в вертикальном сейсмическом профиле используется энергия отраженных волн, содержащаяся в трассе, зарегистрированной в каждом пункте приема, а также первая траектория прямой волны от источника к приемнику, тогда как в сейсмической каротажной диаграмме используется только время пробега прямой волны по первой траектории.
Хотя вертикальные сейсмические профили могут обеспечить ценную информацию о пласте, возмущения источника (например, вариации сейсмической сигнатуры воздушной пушки от взрыва к взрыву) вносят погрешность в исходные сейсмические данные, которые проходят по обрабатывающей цепочке с образованием конечных изображений. Возмущения источника при вертикальном сейсмическом профилировании могут ограничивать широкий диапазон полезности, который могут обеспечить данные вертикальных сейсмических профилей. При регистрации сейсмических данных на поверхности моря эти возмущения источника могут быть хорошо управляемыми с помощью цифровых контроллеров пушек и процессов, таких, как нахождение оценки сигнала источника (см., например, патенты США №№4757482, 5581415, 5995905 и 4476553, которые включены в настоящую заявку посредством ссылки).
Однако в настоящее время нет типового контроллера пушки для ограничивания погрешностей, вносимых возмущениями источника, при регистрации вертикального сейсмического профиля, особенно вертикальных сейсмических профилей при морских исследованиях. Это вопрос, касающийся отсутствия управления, является нерешенным, поскольку изменения формы импульса источника от взрыва к взрыву часто бывают значительными. Эти погрешности обусловлены изменениями моментов запуска и давления запуска, которые могут быть резко выраженными. При сильных волнениях изменения высоты также могут вызывать погрешности. Кое-кто использует дополнительный некалиброванный гидрофон вблизи источника (обычно расположенный в нескольких метрах от источника) для получения частичной информации, полезной для коррекции погрешностей в определении моментов взрывов (погрешностей, вызванных разностями времен в случае высоких волн, нерегулярных запусков источника и т.д.). Тем не менее, частичной информации от дополнительного гидрофона недостаточно для полной деконволюции взрывов из-за близости источника, а на практике такие гидрофоны размещают произвольно относительно источника, и они не регистрируют сигналы с точностью, достаточной для того, чтобы они были полезными. В результате в настоящее время корректируют только значительные погрешности в данных вертикального сейсмического профиля, обусловленные источником. Поэтому сложные способы обработки сейсмических данных не могут быть использованы, поскольку применяемые способы не обеспечивают получение информации о сейсмическом источнике для вертикального сейсмического профиля с точностью, необходимой для придания смысла сложной обработке.
Сущность изобретения
Настоящее изобретение удовлетворяет указанным выше и другим потребностям. В частности, согласно настоящему изобретению предложена система управления источником, включающая в себя сейсмический источник, грузоподъемное устройство, шлангокабель и находящийся в море контроллер источника для управления запуском сейсмического источника, при этом сейсмический источник формирует сейсмические волны, принимаемые скважинными приемниками. Система также может включать в себя буй, закрепленный над сейсмическим источником и находящимся в море контроллером источника, с датчиком перемещения, таким, как устройство глобальной системы позиционирования (GPS), прикрепленным к бую. Датчик перемещения обнаруживает изменения высоты вследствие волн или вариаций прилива и отлива. Система может дополнительно содержать переключатель, управляемый находящимся в море контроллером источника, для инициирования запуска сейсмического источника при предварительно заданной высоте волны. Согласно некоторым объектам сейсмический источник представляет собой группу воздушных пушек. Система также может включать в себя один или несколько находящихся в море датчиков, имеющих фиксированную геометрию относительно сейсмического источника. Один или несколько находящихся в море датчиков могут включать в себя калиброванный гидрофон, датчик глубины и/или датчик давления запуска. Калиброванный гидрофон измеряет сигналы давления на сейсмическом источнике для ретрансляции в процессор. В одном варианте осуществления согласно изобретению аналоговые сигналы, передаваемые от сейсмического источника, преобразуются в цифровую форму находящимся в море контроллером для последующей ретрансляции в процессор. Поэтому система может включать в себя относительно короткие линии аналоговой связи, проходящие между сейсмическим источником и находящимся в море контроллером, при этом все остальные линии связи являются цифровыми. Шлангокабель может включать в себя линии цифровой связи, но не линии аналоговой связи.
Согласно другому объекту изобретения предложена система наблюдения, включающая в себя множество приемников, развернутых в стволе скважины, сейсмический источник на поверхности моря, грузоподъемное устройство, шлангокабель и находящийся в море контроллер источника для управления запуском сейсмического источника. Система также может включать в себя устройство глобальной системы позиционирования, в рабочем положении соединенное с находящимся в море контроллером и прикрепленное к бую, поддерживающему сейсмический источник и находящийся в море контроллер источника. Устройство глобальной системы позиционирования принимает время по Гринвичу, с помощью которого синхронизируются регистрация множеством приемников и запуск сейсмического источника. Система может дополнительно включать в себя множество находящихся в море датчиков, таких, как калиброванный гидрофон, датчик глубины и датчик давления. Согласно некоторым объектам сейсмический источник представляет собой группу воздушных пушек. Группа воздушных пушек может быть расположена по горизонтали в шахматном порядке. В некоторых объектах шлангокабель включает в себя линии цифровой связи, а также линию подачи сжатого воздуха. Система также может включать в себя буй, при этом буй включает в себя датчик перемещения для обнаружения изменений высоты вследствие волн или вариаций прилива и отлива. Система может содержать переключатель, управляемый находящимся в море контроллером источника, для инициирования запуска сейсмического источника при предварительно заданной высоте волны путем учета данных с датчика перемещения. Согласно некоторым аспектам системы грузоподъемное устройство включает в себя кран.
Согласно еще одному объекту изобретения предложен способ использования системы управления источником, включающий в себя увязывание запуска сейсмического источника с навигационной системой для запуска сейсмического источника либо в точное время, либо при точном положении источника. Способ также может включать в себя автоматическую настройку сейсмического источника, измерение волны давления сейсмического источника непосредственно на сейсмическом источнике и измерение глубины погружения сейсмического источника в воде непосредственно на источнике. Синхронизация запуска источника и регистрации скважинными сейсмическими приемниками может быть облегчена с помощью устройства глобальной системы позиционирования, а регистрация поверхностными сейсмическими приемниками также может быть синхронизирована с запуском источника и регистрацией скважинными сейсмическими приемниками. Способ также может включать в себя объединение результатов анализа статистическим методом контроля качества характеристик поверхностного источника и характеристик скважинных приемников и коррекцию вариаций сигнатуры источника. Коррекция может включать в себя калибровку сигнала датчика в ближнем поле, основанную на фиксированной геометрии между сейсмическим источником и локальным датчиком, реконструкцию сигнатуры сейсмического источника в дальнем поле по измеренной сигнатуре в ближнем поле и сохранение истинной амплитуды для привязок сейсмических данных к поверхности, исследований зависимости амплитуды отражения от удаления и периодических наблюдений.
Согласно еще одному объекту изобретения предложен способ усовершенствования вертикального сейсмического профилирования, включающий в себя автоматическую настройку сейсмического источника, измерение давления сейсмического источника непосредственно на сейсмическом источнике, измерение глубины погружения сейсмического источника в воде непосредственно на источнике, увязывание запуска сейсмического источника с навигационной системой для запуска сейсмического источника либо в точное время, либо при точном положении сейсмического источника; синхронизацию со временем по Гринвичу запуска сейсмического источника, регистрацию скважинными сейсмическими приемниками и регистрацию поверхностными сейсмическими приемниками; объединение результатов анализа статистическим методом контроля качества характеристик поверхностного источника и характеристик скважинных приемников и коррекцию вариаций сигнатуры источника. Коррекция может включать в себя калибровку сигнала датчика в ближнем поле, основанную на фиксированной геометрии между сейсмическим источником и локальным датчиком. Коррекция может дополнительно включать в себя реконструкцию сигнатуры сейсмического источника в дальнем поле по измеренной сигнатуре в ближнем поле. Способ также может включать в себя сравнение измеренных сигнатур источника с эталонной сигнатурой источника, при этом эталонная сигнатура источника основана на эталонной сигнатуре сейсмического источника в дальнем поле в файле на буровой площадке. Кроме того, способ может включать в себя увязывание запуска сейсмического источника с точным положением источника путем получения результатов измерений по вертикали глобальной системой позиционирования. В дополнение к этому способ может включать в себя сравнение результата измерения глубины погружения сейсмического источника с предварительно заданным уровнем и может включать в себя блокирование запуска сейсмического источника в случае, если результат измерения глубины погружения меньше, чем предварительно заданный уровень.
Согласно еще одному объекту изобретения предложена система управления источником, включающая в себя сейсмический источник, грузоподъемное устройство, шлангокабель, находящийся в море контроллер источника для управления запуском сейсмического источника и батиметрический датчик для осуществления коррекций, связанные приливно-отливным движением океана. Сейсмический источник формирует сейсмические волны, принимаемые скважинными приемниками, а система может включать в себя устройство синхронизации времени глобальной системы позиционирования.
Дополнительные преимущества и новые признаки изобретения будут изложены в описании, которое следует ниже, или могут быть изучены специалистами в данной области техники при чтении этих материалов или при практическом использовании изобретения. Преимущества изобретения могут быть получены с помощью средств, перечисленных в приложенной формуле изобретения.
Краткое описание чертежей
Сопровождающие чертежи иллюстрируют предпочтительные варианты осуществления настоящего изобретения и являются частью описания. Совместно с нижеследующим описанием чертежами показываются и поясняются принципы настоящего изобретения.
На чертежах:
фиг.1 - упрощенный вид морской буровой установки, находящейся над буровой скважиной, содержащей множество приемников; буровая установка показана несущей обычную аппаратуру для сейсморазведки;
фиг.2 - упрощенный вид морской буровой установки, находящейся над буровой скважиной, содержащей множество приемников; буровая установка показана несущей аппаратуру для сейсморазведки с системой управления источником согласно одному объекту настоящего изобретения;
фиг.3 - схема, иллюстрирующая систему управления источником согласно одному объекту настоящего изобретения;
фиг.4 - схематическое представление способа управления источником согласно одному объекту настоящего изобретения;
фиг.5 - схематическое представление способа управления источником согласно другому объекту настоящего изобретения;
фиг.6 - одна сигнатура в ближнем поле для воздушной пушки с иллюстрацией давления и частоты в зависимости от времени;
фиг.7А - иллюстрация настройки пиков воздушных пушек согласно одному объекту настоящего изобретения;
фиг.7В - иллюстрация настройки осцилляции воздушных пузырей воздушных пушек согласно другому объекту настоящего изобретения.
Повсюду на чертежах одинаковые позиции обозначают подобные, но необязательно идентичные элементы. Хотя изобретение допускает различные модификации и альтернативные формы, конкретные варианты осуществления изобретения на чертежах показаны только для примера и будут описаны в этой заявке подробно. Однако должно быть понятно, что изобретение не предполагается ограниченным конкретными раскрытыми формами. Точнее, изобретение охватывает все модификации, эквиваленты и варианты, попадающие в рамки объема изобретения, определяемого приложенной формулой изобретения.
Подробное описание предпочтительных вариантов осуществления изобретения
Иллюстративные варианты осуществления и объекты изобретения описаны ниже. В интересах ясности в этом описании рассмотрены не все признаки реального осуществления. Конечно, должно быть понятно, что при разработке любого такого реального варианта осуществления должны быть получены многочисленные специфические для осуществления решения, необходимые для достижения конкретных намерений разработчика, такие, как согласованность с системными ограничениями и с ограничениями, связанными с деловой активностью, которые будут изменяться от одного варианта осуществления к другому. Кроме того, должно быть понятно, что такая разработка может потребовать усилий, быть сложной и длительной, но тем не менее будет обычным делом для специалистов в данной области техники, имеющим преимущество от этого раскрытия.
Согласно настоящему изобретению предложены способы и устройства, предназначенные для использования при вертикальном сейсмическом профилировании (ВСП) и при других скважинных сейсмических исследованиях. Принципы, описанные в настоящей заявке, облегчают получение более точной информации о сейсмическом источнике, чем это было возможно ранее, повышают точность сейсмических данных, обеспечивая возможность сложной обработки сейсмических данных. Способы и устройства согласно настоящему изобретению реализуются преимущественно для коррекции или компенсации в случае изменений морских условий и/или для обеспечения синхронизации между запуском источника, регистрацией скважинными сейсмическими приемниками и (необязательно) регистрацией поверхностными сейсмическими приемниками. Однако, хотя способы и устройства показаны в вариантах осуществления изобретения для моря, они также могут быть использованы для применений на суше.
Способы и устройства способствуют лучшему анализу сейсмических данных путем более точного определения сигнатур источника. Более точные сигнатуры источника являются результатом использования системы управления источником, описанной ниже, которая может, например, изменять запуск сейсмического источника для совпадения с заданной высотой волны для каждого взрыва в случае применения на море. Морские волны и вариации прилива и отлива могут вносить шум в сейсмические данные и делать трудным или невозможным оценку сигнатуры источника. Например, трехметровые морские волны могут привести к сдвигу во времени, составляющему 2 мс, вследствие возможных различий вертикального смещения плавучего источника. Более крупные волны могут оказывать даже более значительное влияние. Например, когда взрывы суммируют в процессе получения вертикального сейсмического профиля на стороне буровой установки или вертикального сейсмического профиля с удалением источника от буровой установки, изменение времени пробега для каждого взрыва приводит к расползанию сейсмических сигналов, принимаемых во время суммирования и к утрате высоких частот. Фактически, вследствие шума, который может создаваться сильным волнением, ранее морские исследования ограничивались условиями, при которых морские волны были несколько меньше, чем приблизительно от 3 до 4 м.
Теперь обратимся к чертежам и, в частности, к фиг.1, на которой показан упрощенный вид морской буровой установки (100), расположенной над подводной буровой скважиной (102). Для обеспечения, например, регистрации вертикального сейсмического профиля (ВСП) в буровой скважине (102) в большом количестве размещены разнесенные приемники (103). Буровая установка (100) показана несущей обычную сейсморазведочную систему, в целом обозначенную как (104). Сейсморазведочная система (104) включает в себя воздушную пушку или пушку (106), подвешенную ниже поверхности на буе (108). Аналоговый гидрофон (110) подвешен ниже воздушной пушки (106). Как рассмотрено выше, гидрофон (110) может обеспечить частичную информацию для корректировки погрешностей в определении моментов взрывов (погрешностей, относимых на счет разностей времен между волнами, нерегулярных запусков источника и т.д.), но недостаточно информации для деконволюции взрывов. Гидрофон (110) типичного сейсморазведочной системы (104) устройства наблюдения не является автоматически калибрующимся и поэтому является зависимым от пользователя, который часто меняется.
Одна или несколько аналоговых линий (112) образуют часть шлангокабеля (114), который также может включать в себя воздушную линию. Аналоговые линии (112) обходят грузоподъемное устройство, такое, как кран (116). Аналоговые линии (112) обеспечивают линию аналоговой связи и управления между пушками (106), гидрофоном (110), контроллером (118) пушек и процессором (120) компьютера. Контроллер (118) пушек расположен на буровой установке (100) на удалении от пушек (106). На данный момент отсутствие при контроллере (118) пушек или при процессоре (120) компьютера индикатора данных гидрофона или глубины погружения воздушных пушек, или давления на пушке вызывает эксплуатационные недостатки. В дополнение к этому отключение аналоговых линий (112) во время приведения в действие пушки может приводить к непреднамеренному запуску воздушной пушки (106), которое может создавать угрозу безопасности.
Поэтому качество сейсмических данных, обеспечиваемых обычной компоновкой из фиг.1, является компромиссным. Положение (касательно главным образом глубины погружения) пушек (106) зависит от перемещения буровой установки, волн, работы крана и/или других факторов. До способов и устройств согласно изобретению, описанных в настоящей заявке, не осуществлялась компенсация или коррекция за изменениями глубины, не осуществлялась компенсация в случаях изменений давления воздуха, была очень ограниченной возможность синхронизации запуска пушек (106), и поэтому сигнатура источников-пушек (106) и амплитуда волн были далеки от оптимальных.
Однако система управления источником согласно одному объекту изобретения, показанная на фиг.2, способствует получению намного более точных сейсмических данных. В соответствии с компоновкой из фиг.2 также имеется морская буровая установка (100), расположенная над подводной буровой скважиной (102), содержащей множество приемников (103). Буровая установка (100) показана несущей систему управления источником, в целом обозначенную как (222). В соответствии с некоторыми вариантами осуществления буровая установка (100) может быть заменена подвижным судном. Система (222) управления источником включает в себя сейсмический источник, грузоподъемное устройство, шлангокабель (214) и находящийся в море контроллер (218) источника, предназначенный для управления запуском сейсмического источника. Система (222) управления источником и скважинные приемники (103) могут быть объединены для образования скважинной исследовательской системы.
В соответствии с вариантом осуществления из фиг.2 сейсмический источник представляет собой воздушную пушку (106), которая может быть единственной пушкой, группой пушек или может иметь любую другую компоновку. Грузоподъемное устройство включает в себя кран (116) и относящееся к нему оборудование для обеспечения развертывания и извлечения системы (222) управления источником и воздушной пушки (106). Шлангокабель (214) включает в себя линию подачи воздуха, которая в процессе работы соединена с компрессором. Предпочтительно, чтобы компрессор был расположен на буровой установке (100). Однако в отличие от типичной исследовательской аппаратуры с длинными линиями аналоговой связи шлангокабель (214) системы (222) управления источником согласно фиг.2 включает в себя только линии цифровой связи между находящемся в море контроллером (218) источника и процессором (120) на буровой установке (100). Использование линий передачи цифровой информации исключает любые перекрестные помехи, потери сигнала и возможность непреднамеренного запуска пушки при отключении линий связи. Как упоминалось выше, воздушная пушка (106) управляется находящимся в море контроллером (218) и формирует сейсмические волны, которые принимаются скважинными приемниками (103) для формирования, например, вертикального сейсмического профиля.
Кроме того, система (222) управления источником может включать в себя присоединенный буй (108) для поддержания воздушной пушки (106), находящегося в море контроллера (218) и любой другой находящейся в море аппаратуры. Преимущественно буй (108) может включать в себя навигационную систему или датчик перемещения, такой, как устройство (224) системы глобального позиционирования (GPS). Устройства системы глобального позиционирования можно легко получить от различных поставщиков. Помимо всего прочего устройство (224) системы глобального позиционирования облегчает обнаружение изменений вертикальной высоты (вследствие, например, волн или изменений в характере прилива и отлива). Как упоминалось выше, запуск воздушных пушек (106) при различных высотах волны может отрицательно сказаться на определении сигнатуры источника в виде воздушной пушки (106) и/или на других данных, собираемых посредством скважинных приемников (103). В соответствии с этим с устройства (224) глобальной системы позиционирования информация о положении передается в процессор (120) и/или в находящийся в море контроллер (218) источника, так что воздушная пушка (106) может быть запущена только при определенных высотах. Запуском воздушной пушки (106) при определенных высотах можно управлять посредством переключателя или другого механизма, связанного с устройством (224) системы глобального позиционирования или с находящимся в море контроллером (218), так что воздушная пушка автоматически запускается при некоторой предварительно заданной высоте волны. При обычных морских исследованиях воздушные пушки запускаются через регулярные интервалы времени вне зависимости от высоты. В соответствии с принципами, описанными в настоящей заявке, введение датчика перемещения повышает точность определения сигнатуры источника, что рассмотрено более подробно ниже.
В дополнение к обеспечению информацией о местоположении устройство (224) глобальной системы позиционирования также может принимать и транслировать эталон (единицы) времени в находящийся в море контроллер (218), процессор (120) и/или в любые навигационные подсистемы, которые могут быть использованы совместно с системой (222) управления источником. Эталоном (единицы) времени может быть, например, время по Гринвичу (UTC). Эталон времени по Гринвичу может быть передан в различные подсистемы наблюдений для синхронизации запуска воздушных пушек (106) с регистрацией данных посредством скважинных приемников (103). Согласно некоторым вариантам осуществления изобретения также могут иметься поверхностные приемники, регистрация данных от которых также может быть синхронизирована с запуском воздушных пушек (106) путем использования эталона времени, обеспечиваемого устройством (224) глобальной системы позиционирования.
Кроме того, согласно некоторым вариантам осуществления изобретения находящийся в море контроллер (218) может включать в себя один или несколько находящихся в море датчиков, формирующих сигналы для того, чтобы помимо всего прочего обеспечивать возможность оценки сигнатуры источника. Предпочтительно, чтобы находящиеся в море датчики были размещены в находящемся в море контроллере (218) источника и сохраняли фиксированную геометрию относительно воздушной пушки (106) или другого сейсмического источника. Один или несколько находящихся в море датчиков могут включать в себя, но без ограничения ими: калиброванный цифровой гидрофон (210), датчик (227) глубины или датчик (229) давления воздуха. Один или несколько находящихся в море датчиков могут также включать в себя короткие линии аналоговой связи с находящимся в море контроллером (218) источника, при этом сигналы могут быть преобразованы в цифровую форму на источнике для ретрансляции в процессор (120). Поэтому согласно варианту осуществления изобретения из фиг.2 в случае, если система (222) управления источником включает в себя аналоговые линии, то эти линии являются относительно короткими, а не очень длинными аналоговыми линиями, обнаруживаемыми в предшествующих исследовательских системах, которые развернуты на всем пути от сейсмического источника до буровой установки. Гидрофон (210) согласно настоящему изобретению обеспечивает повышенную точность воспроизведения сигнала в ближнем поле, поскольку он прокалиброван в море, а преобразование в цифровую форму осуществлено около сейсмического источника. В дополнение к этому датчик (229) давления воздуха контролирует давление воздуха, подаваемого в источник с воздушными пушками, и сообщает об изменениях давления при запуске, которые могут быть учтены при определении сигнатуры источника. Поэтому сигнатура сейсмического источника может быть оценена более точно с учетом временных вариаций, гидродинамических вариаций, вариаций давления подаваемого воздуха и т.д. путем использования сигнала калиброванного цифрового гидрофона (210) и отсчетов давления воздуха в сейсмическом источнике.
Для обработки вертикального сейсмического профиля очень важной является оценка точности сигнала источника. Сигнал источника обеспечивает возможность разделения волновых полей восходящих и падающих волн. Благодаря многоканальным скоростным фильтрам, используемым для разделения волновых полей, несостоятельные сигнатуры источника приводят к остаточным сигналам в собранных данных. Эти остаточные сигналы фактически представляют собой «шум» и могут вносить существенное искажение в обработанные результаты. При все возрастающем внимании к измерениям истинной амплитуды и к периодическим скважинным сейсмическим измерениям состоятельность сигнатуры источника является очень важной для вертикального сейсмического профилирования. Хорошая оценка сигнатуры источника, получаемая путем использования способов и устройств, рассматриваемых в настоящей заявке, повышает состоятельность сигнатуры источника.
Ранее калибровка сигнатур источника осуществлялась путем визуальных проверок качества. Эти визуальные проверки качества включают в себя, например, отыскание воздушных пушек, которые не запустились, и проверку того, что частотная характеристика охватывает как нижний, так и верхний концы. Однако такие проверки являются до некоторой степени субъективными и даже хуже того, если эталонная сигнатура в дальнем поле для источника с воздушной пушкой (106) является неизвестной. Однако согласно настоящему варианту осуществления с находящимся в море контроллером (218) источника эталонные сигнатуры в дальнем поле для источника с воздушной пушкой (106) находятся в файле на буровой площадке, поэтому система (222) управления источником может быть запрограммирована для автоматической проверки измеряемой сигнатуры источника в сравнении с эталонной сигнатурой источника. Путем выполнения автоматической проверки гарантируется, что для каждого местоположения буровой площадки сигнатуры источника с воздушной пушкой (106) будут удовлетворять приемлемому критерию качества. Калиброванные и состоятельные сигнатуры источника важны для оценивания подповерхностных изменений при периодических наблюдениях. В случае калиброванной сигнатуры источника вариации отражений сейсмических волн будут представлять подповерхностные изменения, а не изменения сигнатуры источника.
Сигнатуры сейсмических источников для вертикального сейсмического профиля должны быть привязаны к поверхности, и в случае, если имеется изменение начального уровня (например, когда воздушная пушка (106) поднимается и опускается при сильном волнении), будут небольшие временные сдвиги от 1 до 2 мс. Однако изменения начального уровня могут быть исключены или скомпенсированы путем использования устройства (224) системы глобального позиционирования или другого оборудования, воспринимающего перемещение. Кроме того, прежде при скважинных сейсмических измерениях не делали коррекцию на приливно-отливное движение океана. Хотя отказ от выполнения коррекции на приливно-отливное движение океана может быть приемлемым в случае глубоководных исследований, но в зависимости от времени суток и амплитуды прилива и отлива он может существенно влиять на времена пробега в прибрежных районах. Поэтому согласно некоторым вариантам осуществления система (222) управления источником включает в себя датчик (227) глубины для контроля глубины погружения воздушной пушки (106) ниже поверхности воды. Датчиком (227) глубины может быть, например, доступный для приобретения батиметрический датчик. Вариации прилива и отлива также могут быть учтены в соответствии с принципами, описанными в настоящей заявке. В дополнение к этому воздушная пушка (106) может быть автоматически блокирована в случае, если с датчика (227) глубины приходит сообщение о глубине погружения, которая меньше заданного уровня. Параметры, поступающие с находящихся в море датчиков, могут быть автоматически отображены на дисплее процессора (120) для наблюдения пользователем.
Конфигурация воздушных пушек (106) может быть в виде кластерной компоновки, например в виде трехпушечного кластера. Однако также могут быть использованы другие компоновки воздушных пушек. Например, согласно некоторым вариантам осуществления изобретения могут быть предусмотрены кластеры воздушных пушек, содержащие вплоть до восьми или более пушек. Предшествующие способы ограничены одновременным возбуждением воздушных пушек. В настоящем изобретении находящийся в море цифровой контроллер (218) обеспечивает возможность разновременного запуска группы пушек (106), что раньше было недоступно при использовании на буровой установке аналоговых контроллеров, в которых отсутствовала гибкость настройки, позволяющая осуществлять запуск последовательно.
Далее обратимся к фиг.3, на которой показана схематическая иллюстрация одной возможной конфигурации системы (400) управления источником согласно объектам настоящего изобретения. Как показано на фиг.3, процессор (120) может быть портативным компьютером, выполняющим программу цифрового управления источником. Процессор (120) может осуществлять управление и/или контроль находящимися в море контроллером и датчиками (218), описанными выше со ссылкой на фиг.2, в число которых также может быть включено устройство (224, фиг.2) глобальной системы позиционирования. Предпочтительно, чтобы связной интерфейс между процессором (120) и находящимися в море контроллером (218) и датчиками (227, 229) был цифровой линией (430) связи. Эта цифровая линия (430) связи может быть использована для предварительного тестирования системы при подготовке к регистрации данных. Процессор (120) также может быть связан с системой (432) регистрации и отображения, например с системой MAXIS™ (многозадачная система регистрации и отображения) от Schlumberger, через другой цифровой интерфейс (434). Как показано, система (432) регистрации и отображения может включать в себя цифровой интерфейс (436) данных глобальной системы позиционирования. В качестве альтернативы процессор (120) может содержать цифровой интерфейс (436) данных системы глобального позиционирования. В соответствии с примером из фиг.3 процессор (120) и система (432) регистрации и отображения размещены на буровой установке, однако, как наводит на мысль наименование, находящиеся в море контроллер и датчики (218) размещены в воде вблизи воздушной пушки (106) или другого сейсмического источника. Кроме того, находящиеся в море контроллер и датчики (218) могут иметь цифровой интерфейс (438) совместно с системой (432) регистрации и отображения. В процессе регистрации данных этот непосредственный цифровой интерфейс (438) может обеспечивать основное сопряжение с системой (432) регистрации и отображения. Влияние исключительно аналогового интерфейса (440) системы (400) управления источником распространяется на небольшое расстояние между находящимися в море контроллером и датчиками (218) и источником (106) с воздушными пушками.
Далее обратимся к фигурам 4 и 5, на которых показана схематическая иллюстрация, отражающая способы использования системы (222) управления источником и/или усовершенствования вертикального сейсмического профилирования. Однако должно быть понятно, что показанные и описанные способы не ограничены конкретной последовательностью выполнения и не все описанные этапы должны выполняться. Описанные этапы могут быть осуществлены в любой из ряда последовательностей. Согласно одному способу сейсмический источник, такой, как кластер (фиг.2) воздушных пушек, настраивается автоматически, например, посредством находящегося в море контроллера (218) источника. Находящийся в море контроллер (218) источника может поддерживать запуск отдельных воздушных пушек (106, фиг.2, 3) с синхронизацией во времени друг с другом путем совмещения первых пиков давления, обнаруживаемых гидрофоном (210, фиг.2), расположенным вблизи воздушных пушек (106, фиг.2, 3). Однако первый пик давления воздушной пушки превалирует на высоких частотах, которые могут не отображаться как действительно измеренные при глубоких ослабляющих пластах. С другой стороны, пик от воздушного пузыря наблюдается после первого пика давления, он имеет намного меньший частотный состав и распространяется вниз в глубокие ослабляющие пласты. На фиг.6 показана одна сигнатура пушки в ближнем поле без волны-спутника. Как показано, при осцилляции первого воздушного пузыря низкочастотная энергия центрирована.
Поэтому согласно некоторым вариантам осуществления изобретения находящийся в море контроллер (218) источника может настраивать или синхронизировать отдельные воздушные пушки (218) путем совмещения высокочастотных пиков давления, путем совмещения низкочастотных осцилляций воздушных пузырей или другими способами. На фигурах 7A и 7В показано совмещение высокочастотных пиков давления и низкочастотных осцилляций воздушных пузырей соответственно для пушек различных размеров. Как показано, импульсы воздушных пузырей из фиг.7В имеют более высокую амплитуду от пика до пика, являются более сжатыми и обычно легче идентифицируются и пикируются. Поэтому настройка по осцилляциям воздушных пузырей является более эффективной, если необходима низкочастотная энергия.
Способы использования системы (222, фиг.2) управления источником или усовершенствования вертикального сейсмического профилирования включают в себя измерение давления воздушной пушки (106, фиг.2) непосредственно на источнике. Задачу измерения давления воздушной пушки (106, фиг.2) можно облегчить, например, с помощью датчика (229, фиг.2) давления из находящейся в море компоновки датчиков, описанной выше со ссылкой на фиг.2. Глубину погружения воздушной пушки (106, фиг.2) также измеряют непосредственно на источнике. Задача измерения глубины погружения воздушной пушки (106, фиг.2) может быть облегчена, например, с помощью батиметрического датчика или другого датчика (227, фиг.2) глубины, описанного выше. Способы также включают в себя увязывание запуска воздушной пушки (106, фиг.2) с навигационной системой для содействия запуску воздушной пушки (106, фиг.2) в точное время или при точном, предварительно заданном положении, или для обеспечения того и другого.
Преимущества запуска воздушной пушки (106, фиг.2) или другого сейсмического источника исключительно при точных положениях описаны выше.
Навигационной системой, предназначенной для облегчения запуска воздушной пушки (106, фиг.2) при определенных вертикальных положениях может быть, например, устройство (224, фиг.2) глобальной системы позиционирования, рассмотренное со ссылкой на фиг.2, которое принимает и транслирует точные данные о местоположении. Кроме того, устройство (224, фиг.2) глобальной системы позиционирования может принимать и транслировать эталон времени, такой, как время по Гринвичу. Поэтому для уменьшения или исключения погрешностей, обусловленных временными сдвигами, воздушная пушка (106, фиг.2) может управляться в соответствии с информацией о времени и положении, получаемой от устройства (224, фиг.2) глобальной системы позиционирования, и запускаться только при определенной, предварительно заданной высоте волны. Кроме того, согласно некоторым способам запуск воздушной пушки (106, фиг.2) может быть синхронизирован с регистрацией скважинными сейсмическими приемниками в соответствии со временем по Гринвичу или с другим эталоном времени. Индексация данных в соответствии с эталоном времени облегчает предварительную сортировку данных для обработки. Кроме того, индексация характеристик источника и записи приемниками в соответствии с эталоном времени обеспечивает возможность объединения этих данных в единый массив данных или в файл и тем самым облегчает просмотр, передачу или обработку данных. К тому же могут быть объединены результаты анализа статистическим методом контроля качества характеристик поверхностного источника и характеристик скважинного приемника (103, фиг.2). В некоторых случаях запуск воздушной пушки (106, фиг.2) также может быть синхронизирован с регистрацией поверхностными сейсмическими приемниками. Поэтому в таком случае анализ статистическим методом контроля качества (КК) может быть выполнен для синхронизированного массива данных, включающего в себя сигнал поверхностного источника, сигналы, принятые поверхностными приемниками, и сигналы, принятые скважинными приемниками.
Согласно некоторым способам осуществляют коррекцию для изменений сигнатуры источника. Изменения сигнатуры источника могут быть результатом, например, изменений давлений воздуха при запуске, изменений температуры, сильных волнений или вариаций прилива и отлива. Коррекция может включать в себя калибровку сигнала датчика в ближнем поле, принятого гидрофоном (210, фиг.2), расположенным возле воздушной пушки (106, фиг.2) или другого сейсмического источника, в соответствии с фиксированной геометрией воздушной пушки (106, фиг.2) относительно гидрофона (210, фиг.2). Гидрофон (210, фиг.2) может быть частью находящегося в море блока датчиков, рассмотренного выше. Коррекция также может включать в себя реконструкцию сигнатуры в дальнем поле для воздушной пушки (106, фиг.2) или другого источника по измеренной сигнатуре в ближнем поле и сохранение истинной амплитуды для привязок сейсмических данных к поверхности, исследований зависимости амплитуды от удаления (AVO) и периодических наблюдений. В дополнение к этому коррекции сигнатуры источника могут быть выполнены путем сравнения измеренных сигнатур источника с эталонной сигнатурой источника, где эталонная сигнатура источника основана на эталонной сигнатуре в дальнем поле для сейсмического источника, находящейся в файле на буровой площадке.
Предшествующее описание было представлено только для иллюстрации и описания изобретения и некоторых примеров его осуществления. Оно не подразумевается исчерпывающим или ограничивающим изобретение любой точной раскрытой формой. В свете изложенной выше концепции возможны многочисленные модификации и изменения.
Предпочтительные объекты были выбраны и описаны так, чтобы наилучшим образом пояснить принципы изобретения и его практическое применение. Предшествующее описание предполагается обеспечивающим возможность другим специалистам в данной области техники наилучшего использования изобретения в различных вариантах осуществления и аспектах и совместно с различными модификациями, подходящими для ожидаемого конкретного использования. Предполагается, что объем изобретения будет определяться нижеследующей формулой изобретения.
Заявленная группа изобретений относится к способам и устройствам для управления сейсмическими источниками. Способы и устройства обеспечивают возможность запуска сейсмических источников либо в точное время, либо при точном положении сейсмического источника (в частности, при предварительно заданной высоте относительно скважинных приемников, основанной на изменениях по высоте, обусловленных морскими условиями). Технический результат - повышение точности получения сейсмических данных и более состоятельной сигнатуры сейсмического источника. 5 н. и 55 з.п. ф-лы, 7 ил.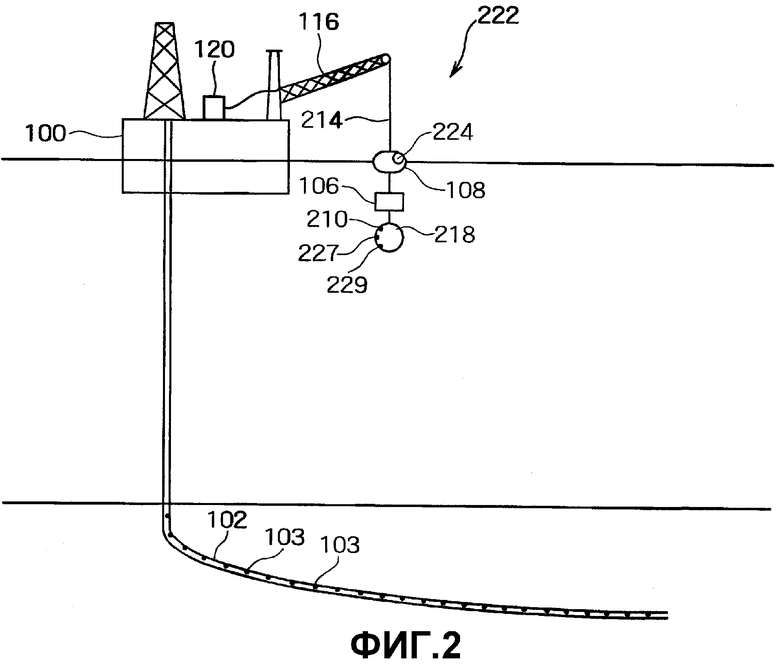
1. Система управления источником, содержащая:
сейсмический источник;
по меньшей мере, один приемник, развернутый в буровой скважине и выполненный с возможностью приема сейсмических волн, сформированных сейсмическим источником;
грузоподъемное устройство, выполненное с возможностью развертывания сейсмического источника в предварительно определенном положении относительно скважинного приемника; и
находящийся в море контроллер источника, выполненный с возможностью запуска сейсмического источника при предварительно заданной высоте относительно скважинных приемников, основанной на изменениях по высоте, обусловленных морскими условиями.
2. Система по п.1, дополнительно содержащая глобальную систему позиционирования (GPS).
3. Система по п.1, дополнительно содержащая буй, закрепленный над сейсмическим источником и находящимся в море контроллером источника, при этом буй содержит датчик перемещения для обнаружения изменений по высоте вследствие волн или изменений, вызванных приливно-отливным движением океана.
4. Система по п.3, в которой датчик перемещения содержит глобальную систему позиционирования.
5. Система по п.4, дополнительно содержащая переключатель, управляемый находящимся в море контроллером источника, для инициирования запуска сейсмического источника при предварительно заданной высоте волны.
6. Система по п.1, в которой сейсмический источник содержит группу воздушных пушек.
7. Система по п.6, дополнительно содержащая воздушный компрессор, в рабочем положении соединенный с группой воздушных пушек посредством шлангокабеля.
8. Система по п.1, дополнительно содержащая один или несколько находящихся в море датчиков, имеющих фиксированную геометрию относительно сейсмического источника.
9. Система по п.8, в которой один или несколько находящихся в море датчиков дополнительно содержат цифровой калиброванный гидрофон.
10. Система по п.8, в которой аналоговые сигналы, формируемые находящимися в море датчиками, преобразуются в цифровую форму на сейсмическом источнике для ретрансляции в процессор.
11. Система по п.8, в которой один или несколько находящихся в море датчиков дополнительно содержат датчик глубины.
12. Система по п.8, в которой один или несколько находящихся в море датчиков дополнительно содержат датчик давления запуска.
13. Система по п.1, в которой шлангокабель содержит линии цифровой связи, а не линии аналоговой связи.
14. Система наблюдения, содержащая:
множество приемников, развернутых в стволе скважины;
группу сейсмических источников на поверхности моря, расположенных в предварительно заданном положении относительно скважинных приемников;
грузоподъемное устройство;
шлангокабель; и
находящийся в море контроллер источника, выполненный с возможностью последовательного запуска отдельных сейсмических источников из группы сейсмических источников и выравнивания первых пиков давления отдельных сейсмических источников.
15. Система по п.14, дополнительно содержащая устройство глобальной системы позиционирования, в рабочем положении соединенное с находящимся в море контроллером источника.
16. Система по п.15, в которой устройство глобальной системы позиционирования прикреплено к бую для поддержания сейсмического источника и находящегося в море контроллера источника.
17. Система по п.15, в которой устройство глобальной системы позиционирования регистрирует эталон единицы времени и в которой множество приемников и сейсмический источник синхронизируются на основе эталона единицы времени.
18. Система по п.17, в которой эталон единицы времени представляет собой время по Гринвичу.
19. Система по п.14, дополнительно содержащая множество находящихся в море датчиков.
20. Система по п.19, в которой множество находящихся в море датчиков содержат один или несколько из:
калиброванного гидрофона, датчика глубины и датчика давления запуска.
21. Система по п.14, в которой сейсмический источник содержит группу воздушных пушек.
22. Система по п.21, в которой группа воздушных пушек расположена в шахматном порядке.
23. Система по п.14, в которой шлангокабель содержит линии цифровой связи.
24. Система по п.14, дополнительно содержащая буй, при этом буй включает в себя датчик перемещения для обнаружения изменений высоты, вызванных волнами или изменениями прилива и отлива.
25. Система по п.24, дополнительно содержащая переключатель, управляемый контроллером источника, для инициирования запуска сейсмического источника при предварительно заданной высоте волны.
26. Система по п.14, в которой грузоподъемное устройство содержит кран.
27. Способ использования системы управления источником, содержащий:
развертывание по меньшей мере одного приемника в скважине;
развертывание сейсмического источника на поверхности моря в предварительно заданном положении относительно скважинного приемника;
управление запуском сейсмического источника с помощью находящегося в море контроллера источника, при этом контроллер источника выполнен с возможностью запуска сейсмического источника при предварительно заданной высоте относительно скважинных приемников, основанной на изменениях по высоте, обусловленных морскими условиями; и синхронизация запуска сейсмического источника с регистрацией скважинным сейсмическим приемником таким образом, что сейсмические волны, сформированные сейсмическим источником, принимаются скважинным приемником.
28. Способ по п.27, дополнительно содержащий автоматическую настройку сейсмического источника.
29. Способ по п.28, в котором автоматическая настройка дополнительно содержит совмещение осцилляции воздушных пузырей отдельных сейсмических источников.
30. Способ по п.28, в котором автоматическая настройка дополнительно содержит совмещение первых пиков давления отдельных сейсмических источников.
31. Способ по п.27, в котором сейсмические волны, принимаемые скважинными приемниками, используют для формирования вертикального сейсмического профиля.
32. Способ по п.27, дополнительно содержащий:
измерение давления запуска сейсмического источника непосредственно на сейсмическом источнике; и
измерение глубины погружения сейсмического источника в воде непосредственно на сейсмическом источнике.
33. Способ по п.27, дополнительно содержащий синхронизацию запуска сейсмического источника с регистрацией скважинным сейсмическим приемником с помощью глобальной системы позиционирования.
34. Способ по п.33, дополнительно содержащий синхронизацию регистрации поверхностным сейсмическим приемником с запуском сейсмического источника и регистрацией скважинным сейсмическим приемником.
35. Способ по п.34, дополнительно содержащий объединение результатов анализа статистическим методом контроля качества характеристик поверхностного источника и характеристик скважинных приемников.
36. Способ по п.27, дополнительно содержащий коррекцию за измерения сигнатуры источника.
37. Способ по п.36, в котором коррекция дополнительно содержит калибровку сигнала датчика в ближнем поле, основанную на фиксированной геометрии между сейсмическим источником и датчиком в ближнем поле.
38. Способ по п.37, в котором коррекция дополнительно содержит реконструкцию сигнатуры сейсмического источника в дальнем поле по измеренной сигнатуре в ближнем поле.
39. Способ по п.36, в котором коррекция дополнительно содержит сохранение истинной амплитуды для привязок сейсмических данных к поверхности, исследований зависимости амплитуды отражения от удаления и периодических наблюдений.
40. Способ по п.36, в котором коррекция дополнительно содержит калибровку сигнала датчика в ближнем поле, основанную на фиксированной геометрии между сейсмическим источником и датчиком в ближнем поле;
реконструкцию сигнатуры сейсмического источника в дальнем поле по измеренной сигнатуре в ближнем поле; и
сохранение истинной амплитуды для привязок сейсмических данных к поверхности, исследований зависимости амплитуды отражения от удаления и периодических наблюдений.
41. Способ по п.27, в котором сейсмический источник содержит группу воздушных пушек.
42. Способ по п.32, дополнительно содержащий сравнение глубины погружения сейсмического источника в воде с предварительно заданным уровнем.
43. Способ по п.42, дополнительно содержащий блокирование запуска сейсмического источника, в случае, если глубина погружения сейсмического источника меньше, чем предварительно заданный уровень.
44. Способ усовершенствования вертикального сейсмического профилирования, содержащий:
развертывание сейсмического источника в предварительно заданном положении относительно буровой скважины;
развертывание по меньшей мере одного приемника в буровой скважине;
управление запуском сейсмического источника для запуска на предварительно заданной высоте выше морского дна на основании изменений по высоте, обусловленных морскими условиями.
45. Способ по п.44, дополнительно содержащий синхронизацию с эталоном единицы времени запуска сейсмического источника, регистрацию скважинными сейсмическими приемниками и регистрацию поверхностными сейсмическими приемниками.
46. Способ по п.45, дополнительно содержащий объединение результатов анализа статистическим методом контроля качества характеристик поверхностного источника и характеристик скважинных приемников.
47. Способ по п.44, дополнительно содержащий коррекцию за изменения сигнатуры сейсмического источника.
48. Способ по п.45, дополнительно содержащий коррекцию за изменения сигнатуры сейсмического источника.
49. Способ по п.44, в котором сейсмический источник представляет собой группу воздушных пушек.
50. Способ по п.49, содержащий запуск группы воздушных пушек с разнесением по времени.
51. Способ по п.44, в котором коррекция дополнительно содержит калибровку сигнала датчика в ближнем поле, основанную на фиксированной геометрии между сейсмическим источником и локальным датчиком.
52. Способ по п.44, в котором коррекция дополнительно содержит реконструкцию сигнатуры сейсмического источника в дальнем поле по измеренной сигнатуре в ближнем поле.
53. Способ по п.52, дополнительно содержащий сохранение истинной амплитуды для привязки сейсмических данных к поверхности.
54. Способ по п.51, дополнительно содержащий сравнение измеренных сигнатур источника с эталонной сигнатурой источника, при этом эталонная сигнатура источника основана на эталонной сигнатуре сейсмического источника в дальнем поле в файле на буровой площадке.
55. Способ по п.44, в котором увязывание запуска сейсмического источника в точное время или при точном положении источника включает в себя получение результатов измерений глобальной системой позиционирования.
56. Способ по п.44, в котором увязывание запуска сейсмического источника при точном положении источника включает в себя получение результатов измерений от датчика перемещения для обнаружения изменений высоты вследствие волн или изменений прилива и отлива.
57. Способ по п.44, дополнительно содержащий сравнение глубины погружения сейсмического источника в воде с предварительно заданным уровнем.
58. Способ по п.57, дополнительно содержащий блокирование запуска сейсмического источника, если глубина погружения сейсмического источника меньше, чем предварительно заданный уровень.
59. Система управления источником для скважинных сейсмических исследований, содержащая:
по меньшей мере, один приемник, развернутый в буровой скважине, сейсмический источник;
грузоподъемное устройство, выполненное с возможностью развертывания сейсмического источника в предварительно заданном положении относительно скважинного приемника;
находящийся в море контроллер источника, выполненный с возможностью синхронизации запуска сейсмического источника с регистрацией скважинным приемником, при этом система выполнена с возможностью повторных запусков сейсмического источника на той же самой предварительно заданной высоте запуска относительно скважинного приемника на основании изменений по высоте, обусловленных морскими условиями, для многократных активации источника, а также система выполнена с возможностью обнаружения изменений по высоте сейсмического источника относительно скважинного приемника и повторных запусков источника, при этом обнаруженная высота сейсмического источника относительно скважинного приемника является той же самой, что предварительно заданная высота.
60. Система по п.59, дополнительно содержащая устройство синхронизации времени глобальной системы позиционирования.
| US 4757482 А, 12.07.1988 | |||
| US 4660184 А, 21.04.1987 | |||
| Способ сейсморазведки на акваториях | 1989 |
|
SU1697028A1 |
| Способ морской электроразведки шельфовых зон | 1990 |
|
SU1805425A1 |

