Родственные заявки
Настоящая заявка представляет собой частично продолжающуюся заявку №10/439904 на патент США, поданную 16 мая 2003 г и озаглавленную “Methods and apparatus of source control for borehole seismic”.
Область техники, к которой относится изобретение
Настоящее изобретение относится к способам и аппаратуре для исследований подземных пластов. Более конкретно, настоящее изобретение относится к способам и аппаратуре для управления сейсмическими источниками.
Уровень техники
В последние несколько десятилетий анализ подземных пластов позволяет осуществлять более эффективную добычу нефти и газа. В последние годы разведку на нефть производят на все более глубоких горизонтах воды. По мере увеличения горизонтов воды и возрастания длины пробуренных скважин подземные пласты часто становятся более сложными. Для содействия более эффективной добыче нефти часто желательно формировать вертикальный сейсмический профиль.
Вертикальное сейсмическое профилирование представляет собой класс скважинных сейсмических измерений, используемых для нахождения корреляции между данными от поверхностных сейсмических приемников и данными кабельного каротажа. Вертикальные сейсмические профили можно использовать для привязки поверхностных сейсмических данных к скважинным данным, при этом обеспечивается полезная привязка к глубинам по стволу скважины. Обычно из вертикальных сейсмических профилей извлекают данные с более высоким разрешением, чем обеспечивают поверхностные сейсмические профили. Вертикальные сейсмические профили позволяют преобразовывать сейсмические данные в нуль-фазовые данные, а также позволяют отличать однократные отражения от многократных волн. Кроме того, вертикальный сейсмический профиль часто используют для анализа участков пласта перед буровым долотом.
В узком смысле вертикальное сейсмическое профилирование относится к измерениям, осуществляемым в вертикальном стволе скважины с использованием акустических приемников внутри ствола скважины и сейсмического источника на поверхности вблизи скважины. Однако в более общем смысле, используемом в настоящей заявке, вертикальные сейсмические профили изменяются в зависимости от конфигурации скважины, числа и местоположения источников и акустических приемников и от того, как они развернуты. При всем том вертикальное сейсмическое профилирование означает развертывание по меньшей мере нескольких приемников в стволе скважины. Большей частью для вертикального сейсмического профилирования используют поверхностный сейсмический источник, которым обычно является вибратор на суше или воздушная пушка в морской среде.
Имеются различные конфигурации вертикального сейсмического профилирования, включая вертикальное сейсмическое профилирование с источником над приемником, вертикальное сейсмическое профилирование с источником, удаленным от буровой установки, вертикальное сейсмическое профилирование со смещением источника на поверхности, вертикальное сейсмическое профилирование при вертикальном падении, вертикальное сейсмическое профилирование вблизи соляного осадка, вертикальное сейсмическое профилирование при различных удалениях источник-приемник и вертикальное сейсмическое профилирование по шумам бурения или по сейсмическим данным в процессе бурения. Контрольный сейсмический каротаж аналогичен вертикальному сейсмическому профилированию в том, что акустические приемники размещают в скважине, а поверхностный источник используют для излучения акустического сигнала. Однако вертикальное сейсмическое профилирование является более детальным, чем контрольный сейсмический каротаж. При вертикальном сейсмическом профилировании приемники обычно располагают более близко, чем при контрольном сейсмическом каротаже; контрольный сейсмический каротаж может включать в себя интервалы измерений, составляющие сотни метров. Кроме того, при вертикальном сейсмическом профилировании используют отраженную энергию, содержащуюся в трассе, зарегистрированной в каждом положении приемника, а также первую траекторию прямой волны от источника к приемнику, тогда как при контрольном сейсмическом каротаже используют только время пробега по траектории прямой волны.
Хотя вертикальные сейсмические профили могут давать ценную информацию о пласте, возмущения источника (например, изменения формы сейсмического сигнала воздушной пушки от взрыва к взрыву) вносят погрешность в исходные сейсмические данные, которая проникает через тракт обработки в конечные получаемые изображения. Возмущения источника при вертикальном сейсмическом профилировании могут ограничивать диапазон полезности, который могут обеспечивать данные вертикальных сейсмических профилей. При регистрации сейсмических данных на поверхности моря эти возмущения источника могут хорошо регулироваться с помощью цифровых контроллеров пушек и процессов обработки, таких как оценивание сигнала источника (см., например, патенты США №№4757482, 5581415, 5995905 и 4476553, которые включены в настоящую заявку путем ссылки).
Однако при регистрациях данных вертикального сейсмического профиля, особенно морского вертикального сейсмического профиля, в настоящее время отсутствует стандартный контроллер пушки для ограничения погрешности, вносимой возмущениями источника. Это отсутствие контроля является проблемой, поскольку изменения импульса источника от взрыва к взрыву часто являются значительными. Эти погрешности создаются изменениями согласования во времени и давления возбуждения, которые могут быть ясно выраженными. При сильных волнениях изменения возвышения также могут создавать погрешности. Некоторые добавляют некалиброванный гидрофон поблизости от источника (обычно расположенный в нескольких метрах от источника) для получения частичной информации, полезной для коррекции погрешностей в определении момента взрыва (погрешностей, приписываемых разностям времени в случае высоких волн, нерегулярным возбуждениям источника и т.д.). Однако частичной информации от добавленного гидрофона недостаточно для полной деконволюции взрывов вследствие близости источника, а на практике такие гидрофоны являются произвольно расположенными относительно источника и не регистрируют сигналы с качеством, достаточным для использования. В результате в настоящее время корректируют только большие погрешности данных источника при вертикальном сейсмическом профилировании. Поэтому сложные способы обработки сейсмических данных не могут использоваться, поскольку принятыми в настоящее время способами при вертикальном сейсмическом профилировании не обеспечивается информация о сейсмическом источнике с точностью, необходимой для осуществления сложной эффективной обработки.
Кроме того, некоторые сейсмические системы включают в себя связку или группу воздушных пушек. В некоторых из этих систем все воздушные пушки возбуждаются одновременно. Предназначение нескольких воздушных пушек заключается в повышении амплитуды сейсмического сигнала. Однако разнесение воздушных пушек по вертикали и поверхность моря приводят к смещениям сигналов и к тому, что иногда называют образованием волн-спутников.
Сущность изобретения
Настоящее раскрытие направлено на удовлетворение по меньшей мере некоторых из описанных выше потребностей и других. В частности, согласно одному варианту осуществления изобретения предложена сейсмическая система. Сейсмическая система содержит первый сейсмический источник, второй сейсмический источник, отстоящий по вертикали от первого сейсмического источника, первый сейсмический датчик на втором сейсмическом источнике и контроллер, функционально соединенный с первым и вторым сейсмическими источниками и первым сейсмическим датчиком. Контроллер запрограммирован на возбуждение первого сейсмического источника и регулирование времени возбуждения второго сейсмического источника на основании отклика от первого сейсмического датчика. В одном варианте осуществления изобретения контроллер запрограммирован на регулирование времени возбуждения второго сейсмического источника на основании отклика от первого сейсмического датчика для совмещения первого максимума давления от второго сейсмического источника с первым максимумом давления от первого сейсмического источника. Один вариант осуществления изобретения дополнительно содержит третий сейсмический источник, отстоящий по вертикали от второго сейсмического источника, и второй сейсмический датчик на третьем сейсмическом источнике. Контроллер функционально соединен с третьим сейсмическим источником и вторым сейсмическим датчиком, и контроллер запрограммирован на регулирование времени возбуждения третьего сейсмического источника на основании отклика от второго сейсмического датчика для совмещения первого максимума давления от третьего сейсмического источника с первыми максимумами давления от первого и второго сейсмических источников.
В одном варианте осуществления изобретения сейсмической системы каждый из сейсмических источников содержит камеру воздушной пушки различного объема для компенсации изменений формы импульса источника, обусловленных повышением давления воды с глубиной. В некоторых вариантах осуществления изобретения контроллер представляет собой находящийся в море контроллер. В одном варианте осуществления изобретения первый и второй сейсмические источники содержат находящиеся в море воздушные пушки.
Один вариант осуществления изобретения сейсмической системы дополнительно содержит множество приемников, развернутых в скважине, и блок синхронизации, функционально соединенный со множеством приемников и контроллером. Блок синхронизации синхронизирует возбуждение эшелонированных сейсмических источников с регистрацией множеством приемников в скважине.
Один вариант осуществления изобретения сейсмической системы дополнительно содержит множество дополнительных разнесенных по вертикали сейсмических источников и сейсмический датчик на каждом из множества дополнительных разнесенных по вертикали сейсмических источников. Контроллер функционально соединен с каждым из множества дополнительных сейсмических источников и каждым сейсмическим датчиком. Контроллер запрограммирован на регулирование времени возбуждения каждого из множества дополнительных разнесенных по вертикали сейсмических источников на основании отклика от сейсмических датчиков для совмещения первых максимумов давления от каждого из множества дополнительных разнесенных по вертикали сейсмических источников с первым максимумом давления от первого сейсмического источника. В некоторых вариантах осуществления изобретения каждый из сейсмических источников содержит камеру воздушной пушки различного объема для компенсации изменений формы импульса, обусловленных повышением давления воды с глубиной.
Согласно одному варианту осуществления изобретения предложена исследовательская система, содержащая множество приемников, развернутых в подводной скважине, группу сейсмических источников, установленных в линию по вертикали около поверхности, по меньшей мере один сейсмический датчик на одном или нескольких отдельных источниках из группы сейсмических источников и находящийся в море контроллер источников, выполненный с возможностью последовательного возбуждения отдельных источников из группы сейсмических источников и совмещения первых максимумов давления от отдельных источников. В одном варианте осуществления изобретения по меньшей мере один сейсмический датчик содержит сейсмический датчик на каждом отдельном источнике, за исключением первого отдельного источника, и сейсмические датчики обеспечивают отклик к находящемуся в море контроллеру источников для содействия совмещению первых максимумов давления. Согласно одному варианту осуществления изобретения находящийся в море контроллер источников принимает отклик с постепенно заглубляющихся датчиков из по меньшей мере одного сейсмического датчика и регулирует возбуждение отдельных источников в ответ на отклик для совмещения первых максимумов давления. В одном варианте осуществления изобретения система находится в фиксированной горизонтальной системе координат. Некоторые варианты осуществления изобретения находящегося в море контроллера источников запрограммированы на возбуждение группы сейсмических источников на постоянной абсолютной высоте. В некоторых вариантах осуществления изобретения находящийся в море контроллер запрограммирован на возбуждение группы сейсмических источников на фиксированном вертикальном месте относительно приемников, развернутых в подводной скважине. Один вариант осуществления изобретения дополнительно содержит блок синхронизации, функционально соединенный со множеством приемников и контроллером, и блок синхронизации синхронизирует последовательное возбуждение источников с регистрацией множеством приемников, развернутых в подводной скважине. Согласно некоторым вариантам осуществления изобретения находящийся в море контроллер источников выполнен с возможностью динамического изменения последовательного возбуждения отдельных источников из группы сейсмических источников для совмещения первых максимумов давления от отдельных источников.
Согласно одному аспекту предложен способ управления возбуждением находящихся в море сейсмических источников. Способ содержит этапы, на которых осуществляют динамическое эшелонирование возбуждения находящейся в море группы сейсмических источников и повышают амплитуду продольной волны, создаваемой при эшелонированном возбуждении. В одном варианте осуществления изобретения на этапе динамического эшелонированного возбуждения принимают отклик от одного или нескольких сейсмических датчиков, локальных по отношению к находящейся в море группе, и эшелонируют последовательность возбуждения находящейся в море группы сейсмических источников на основании отклика. В одном варианте осуществления изобретения на этапе динамического эшелонированного возбуждения принимают сейсмический отклик от множества сейсмических датчиков (при этом имеется по меньшей мере один из множества сейсмических датчиков, связанных со всеми, кроме первого отдельного источника из находящейся в море группы) и эшелонируют последовательность возбуждения находящейся в море группы сейсмических источников на основании отклика. В некоторых вариантах осуществления изобретения на этапе динамического эшелонированного возбуждения возбуждают первый отдельный сейсмический источник из находящейся в море группы, обнаруживают первый максимум давления, получающийся в результате возбуждения первого отдельного сейсмического источника, передают данные о первом максимуме давления на контроллер и возбуждают второй отдельный сейсмический источник из находящейся в море группы на основании данных о первом максимуме давления. В одном варианте осуществления изобретения на этапе динамического эшелонированного возбуждения возбуждают второй сейсмический источник из находящейся в море группы на основании данных о первом максимуме давления, а на этапе повышения амплитуды продольной волны совмещают первый максимум давления от второго сейсмического источника с первым максимумом давления от первого сейсмического источника. В одном варианте осуществления изобретения на этапе динамического эшелонированного возбуждения возбуждают третий сейсмический источник из находящейся в море группы на основании данных о первом максимуме давления, получающемся в результате возбуждения первого и второго сейсмических источников, и на этапе повышения амплитуды продольной волны совмещают первые максимумы давления от второго и третьего сейсмических источников с первым максимумом давления от первого сейсмического источника.
Согласно одному аспекту способа управления возбуждением находящихся в море сейсмических источников на этапе динамического эшелонированного возбуждения (а) возбуждают сейсмический источник из находящейся в море группы, (b) обнаруживают первый максимум давления, получающийся в результате возбуждения сейсмического источника, (с) передают данные о первом максимуме давления на контроллер, (d) возбуждают последующий сейсмический источник из находящейся в море группы на основании данных о первом максимуме давления, (е) повторяют этапы (a)-(d) для каждого сейсмического источника из находящейся в море группы, и на этапе повышения амплитуды продольной волны совмещают первые максимумы давления от каждого сейсмического источника.
Согласно одному аспекту предложен способ сейсмических исследований. Способ содержит этапы, на которых возбуждают первую воздушную пушку под водой на первой глубине, ближайшей к поверхности, контролируют первую продольную волну от первого сейсмического источника первым датчиком, осуществляют отклик данных о контролируемой первой продольной волне на контроллер, возбуждают вторую воздушную пушку на второй глубине, при этом вторая глубина находится глубже, чем первая глубина, на основании данных о контролируемой первой продольной волне для, по существу, максимизации амплитуды волны путем наложения продольных волн от первой и второй воздушных пушек и принимают данные о волне, относящиеся к подземному пласту, получающиеся в результате возбуждения воздушных пушек. В одном варианте осуществления изобретения способ дополнительно содержит этапы, на которых последовательно возбуждают дополнительные воздушные пушки, каждую глубже, чем последнюю, на основании данных о контролируемой продольной волне от предшествующих возбуждений для дальнейшей, по существу, максимизации амплитуды волны путем наложения продольных волн от всех воздушных пушек.
Согласно одному аспекту предложен способ, содержащий этапы, на которых возбуждают воздушную пушку под водой на первом месте, измеряют нисходящую продольную волну, получающуюся в результате возбуждения воздушной пушки на втором, более глубоком месте; последовательно возбуждают дополнительные воздушные пушки и активно регулируют время возбуждения каждой последовательно возбуждаемой дополнительной воздушной пушки для непрерывного совмещения максимумов давления от всех воздушных пушек. В одном варианте осуществления изобретения на этапе активного регулирования дополнительно повышают амплитуду нисходящей продольной волны. В одном варианте осуществления изобретения на этапе активного регулирования подают результаты измерений нисходящей продольной волны на последовательно более глубоких местах на контроллер воздушных пушек.
Согласно одному варианту осуществления изобретения предложена система управления источником для скважинных сейсмических исследований, содержащая подводный сейсмический источник, по меньшей мере один приемник, развернутый в подводной скважине и выполненный с возможностью приема сейсмических волн, излучаемых подводным сейсмическим источником, систему спуска и подъема, выполненную с возможностью развертывания сейсмического источника, и контроллер источника, выполненный с возможностью многократного возбуждения подводного сейсмического источника на одной и той же высоте. В одном варианте осуществления изобретения контроллер источника выполнен с возможностью многократного возбуждения подводного сейсмического источника только на одной и той же высоте. В одном варианте осуществления изобретения контроллер источника выполнен с возможностью многократного возбуждения подводного сейсмического источника на одной и той же абсолютной высоте. В одном варианте осуществления изобретения контроллер источника выполнен с возможностью многократного возбуждения подводного сейсмического источника только на одной и той же абсолютной высоте.
Согласно одному аспекту предложен способ использования системы управления источником, содержащий развертывание по меньшей мере одного приемника в скважине, развертывание сейсмического источника на или вблизи поверхности моря на заранее определенном месте относительно скважинного приемника, регулирование возбуждения сейсмического источника находящимся в море контроллером источника и синхронизацию возбуждения сейсмического источника с регистрацией скважинным приемником с тем, чтобы сейсмические волны, излучаемые сейсмическим источником, принимались скважинным приемником. Способ может дополнительно содержать автоматическую настройку сейсмического источника. Автоматическая настройка может содержать совмещение первых максимумов давления от отдельных сейсмических источников. Сейсмические волны, принимаемые скважинными приемниками, могут использоваться для формирования вертикального сейсмического профиля. В одном варианте осуществления изобретения способ дополнительно содержит измерение давления возбуждения сейсмического источника непосредственно на сейсмическом источнике и измерение глубины сейсмического источника в воде непосредственно на сейсмическом источнике.
Согласно одному аспекту предложен способ улучшения вертикального сейсмического профилирования. Способ содержит развертывание сейсмического источника, развертывание по меньшей мере одного приемника в скважине и регулирование возбуждения сейсмического источника для многократного возбуждения на одной и той же высоте над морским дном, несмотря на изменения волны и приливного движения. Один вариант осуществления изобретения дополнительно содержит синхронизацию возбуждения сейсмического источника, регистрацию скважинным сейсмическим приемником и регистрацию поверхностным сейсмическим приемником с эталоном времени. Один вариант осуществления изобретения содержит сочетание статистического анализа контроля качества характеристик поверхностного источника с аналогичным анализом характеристик скважинного приемника.
Согласно одному варианту осуществления изобретения предложена система управления источником для скважинных сейсмических исследований, содержащая по меньшей мере один приемник, развернутый в скважине, сейсмический источник, систему спуска и подъема, выполненную с возможностью развертывания сейсмического источника на абсолютной высоте относительно скважинного приемника, шлангокабель, находящийся в море контроллер источника, выполненный с возможностью синхронизации возбуждения сейсмического источника с регистрацией скважинным приемником, и батиметрический датчик, выполненный с возможностью компенсации изменений морских условий для гарантии многократного возбуждения сейсмического источника на абсолютной высоте.
Согласно одному варианту осуществления изобретения предложена исследовательская система, содержащая множество приемников, развернутых в скважине, сейсмический источник на или вблизи поверхности моря, систему спуска и подъема, шлангокабель, находящийся в море контроллер источника, выполненный с возможностью регулирования возбуждения сейсмического источника, блок синхронизации, в процессе работы соединенный с находящимся в море контроллером источника и выполненный с возможностью синхронизации регистрации множеством приемников в скважине и возбуждения сейсмического источника, и датчик глобальной системы позиционирования в связи с контроллером источника с тем, чтобы сейсмический источник возбуждался на одной и той же абсолютной высоте возбуждения сейсмического источника для компенсации изменений морских условий.
Согласно одному варианту осуществления изобретения предложена система управления источником для скважинных сейсмических исследований, содержащая подводный сейсмический источник, по меньшей мере один приемник, развернутый в подводной скважине и выполненный с возможностью приема сейсмических волн, излучаемых подводным сейсмическим источником, стационарную систему спуска и подъема, выполненную с возможностью развертывания подводного сейсмического источника, датчик вертикальной высоты для обнаружения высотной отметки воды, в процессе работы соединенный с подводным сейсмическим источником, и контроллер источника, запрограммированный на многократное возбуждение подводного сейсмического источника на одной и той же высотной отметке воды на основании информации от датчика вертикальной высоты.
Согласно некоторым аспектам система управления источником включает в себя сейсмический источник, систему спуска и подъема, шлангокабель и находящийся в море контроллер источника для регулирования возбуждения сейсмического источника, при этом сейсмический источник излучает сейсмические волны, принимаемые скважинными приемниками. Система может также включать в себя поплавок, закрепленный выше сейсмического источника, и находящийся в море контроллер источника с датчиком движения, таким как блок глобальной системы позиционирования, прикрепленный к поплавку. Датчик движения обнаруживает изменения высоты вследствие волн или изменений приливного движения. Система может дополнительно включать в себя переключатель, управляемый находящимся в море контроллером источника, для инициирования возбуждения сейсмического источника на абсолютной высоте. В соответствии с некоторыми аспектами сейсмический источник представляет собой группу воздушных пушек. Система может также включать в себя один или несколько находящихся в море датчиков, имеющих фиксированную геометрию по отношению к сейсмическому источнику. Один или несколько находящихся в море датчиков могут включать в себя калиброванный гидрофон, датчик глубины и/или датчик давления возбуждения. Калиброванный гидрофон измеряет сигналы давления на сейсмическом источнике для передачи на процессор. В одном варианте осуществления изобретения аналоговые сигналы передаются от сейсмического источника и преобразуются в цифровую форму находящимся в море контроллером для последующей передачи на процессор. Поэтому система может включать в себя относительно короткие аналоговые линии связи, проложенные между сейсмическим источником и находящимся в море контроллером, при этом все остальные линии связи являются цифровыми. Шлангокабель может включать в себя цифровые линии связи, но не аналоговые линии связи.
Согласно другому аспекту изобретения предложена исследовательская система, включающая в себя множество приемников, развернутых в скважине, сейсмический источник на поверхности моря, систему спуска и подъема, шлангокабель и находящийся в море контроллер источника для регулирования возбуждения сейсмического источника. Система может включать в себя блок глобальной системы позиционирования, в процессе работы соединенный с находящимся в море контроллером источника и прикрепленный к поплавку, поддерживающему сейсмический источник и находящийся в море контроллер источника. Блок глобальной системы позиционирования принимает всемирное скоординированное время, по которому осуществляется синхронизация регистрации множеством приемников и возбуждение сейсмического источника. Система может дополнительно включать в себя множество находящихся в море датчиков, таких как калиброванный гидрофон, датчик глубины и датчик давления. В соответствии с некоторыми аспектами сейсмический источник представляет собой группу воздушных пушек. Воздушные пушки группы могут быть эшелонированы по горизонтали. Воздушные пушки группы могут быть эшелонирована по вертикали. Согласно некоторым аспектам шлангокабель включает в себя цифровые линии связи, а также подачу воздуха. Система может также включать в себя поплавок, при этом поплавок включает в себя датчик движения для обнаружения изменений абсолютной высоты (вследствие, например, волн или изменений приливного движения). Система может включать в себя переключатель, управляемый находящимся в море контроллером источника, для инициирования возбуждения сейсмического источника многократно на одной и той же абсолютной высоте с учетом данных от датчика движения. В соответствии с некоторыми аспектами системы кран входит в состав системы спуска и подъема.
Согласно еще одному аспекту изобретения предложен способ использования системы управления источником, включающий в себя объединение возбуждения сейсмического источника с навигационной системой для возбуждения сейсмического источника в точное время или в точном положении источника. Способ может также включать в себя автоматическую настройку сейсмического источника, измерение продольной волны сейсмического источника непосредственно на сейсмическом источнике и измерение глубины в воде сейсмического источника непосредственно на источнике. Синхронизация возбуждения источника и регистрации скважинными сейсмическими приемниками может быть облегчена с помощью устройства глобальной системы позиционирования, а регистрация поверхностными сейсмическими приемниками также может быть синхронизирована с возбуждением источника и регистрацией скважинными сейсмическими приемниками. Способ может также включать в себя сочетание статистического анализа контроля качества характеристик поверхностного источника с аналогичным анализом характеристик скважинных приемников и коррекцию за изменения формы импульса источника. Коррекция может включать в себя калибровку сигнала датчика в ближнем поле на основании фиксированной геометрии между сейсмическим источником и локальным датчиком, восстановление формы импульса сейсмического источника в дальнем поле по измеренной форме импульса в ближнем поле и поддержание истинной амплитуды для поверхностных сейсмических калибровок, исследований зависимости амплитуды отражения от удаления и периодических наблюдений.
Согласно еще одному аспекту изобретения предложен способ улучшения вертикального сейсмического профилирования, включающий в себя автоматическую настройку сейсмического источника, измерение давления сейсмического источника непосредственно на сейсмическом источнике, измерение глубины в воде сейсмического источника непосредственно на источнике, объединение возбуждения сейсмического источника с навигационной системой для возбуждения сейсмического источника в точное время или в точном положении источника; синхронизацию возбуждения сейсмического источника, регистрацию скважинными сейсмическими приемниками и регистрацию поверхностными сейсмическими приемниками со всемирным скоординированным временем; объединение статистического анализа контроля качества характеристик поверхностного источника с аналогичным анализом характеристик скважинных приемников и коррекцию за изменения формы импульса источника. Коррекция может включать в себя калибровку сигнала в ближнем поле датчика на основании фиксированной геометрии между сейсмическим источником и локальным датчиком. Коррекция может дополнительно включать в себя восстановление формы импульса в дальнем поле сейсмического источника по измеренной форме импульса в ближнем поле. Способ может также включать в себя сравнение измеренных форм импульса источника с эталонной формой импульса источника, при этом эталонная форма импульса источника основана на эталонной форме импульса в дальнем поле источника в файле на месте расположения скважины. Кроме того, способ может включать в себя объединение возбуждения сейсмического источника в точном положении источника с результатами вертикальных измерений с помощью глобальной системы позиционирования. В дополнение к этому способ может включать в себя сравнение результата измерения глубины сейсмического источника с заранее определенным уровнем и может включать в себя блокирование возбуждения сейсмического источника, если результат измерения глубины меньше или больше, чем заранее определенный уровень.
Согласно еще одному аспекту изобретения предложена система управления источником, включающая в себя сейсмический источник, систему спуска и подъема, шлангокабель, находящийся в море контроллер источника для регулирования возбуждения сейсмического источника и батиметрический датчик для осуществления поправок за лунно-солнечное притяжение. Сейсмический источник излучает сейсмические волны, принимаемые скважинными приемниками, а система может включать в себя блок синхронизации времени глобальной системы позиционирования.
Согласно некоторым аспектам предусмотрена система управления источником для скважинных сейсмических исследований, включающая в себя сейсмический источник, по меньшей мере один приемник, развернутый в скважине и выполненный с возможностью приема сейсмических волн, излучаемых сейсмическим источником, систему спуска и подъема, выполненную с возможностью развертывания сейсмического источника на определенной высоте относительно скважинного приемника, и находящийся в море контроллер источника, выполненный с возможностью возбуждения сейсмического источника только в случае, когда сейсмический источник находится на определенной высоте относительно скважинных приемников. Согласно дальнейшим аспектам предусмотрена исследовательская система, включающая в себя множество приемников, развернутых в стволе скважины, связку сейсмических источников на поверхности моря на заранее определенном месте относительно скважинных приемников, систему спуска и подъема, шлангокабель и находящийся в море контроллер источников, выполненный с возможностью последовательного возбуждения отдельных источников из связки сейсмических источников и совмещения первых максимумов давления от отдельных источников. Согласно дальнейшему аспекту предусмотрен способ использования системы управления источником, включающий в себя развертывание по меньшей мере одного приемника в скважине, развертывание сейсмического источника на поверхности моря на заранее определенном месте относительно скважинного приемника, регулирование возбуждения сейсмического источника находящимся в море контроллером источника и синхронизацию возбуждения сейсмического источника с регистрацией скважинным приемником, так что сейсмические волны, излучаемые сейсмическим источником, принимаются скважинным приемником. Другие аспекты включают в себя автоматическую настройку сейсмического источника, например, путем совмещения первых максимумов давления от отдельных сейсмических источников и использование сейсмических волн, принимаемых скважинными приемниками, для формирования вертикального сейсмического профиля. Давление возбуждения сейсмического источника может быть измерено непосредственно на сейсмическом источнике и глубина в воде сейсмического источника может быть измерена непосредственно на сейсмическом источнике.
Другие аспекты, предусмотренные в настоящей заявке, включают в себя способ улучшения вертикального сейсмического профилирования, включающий в себя развертывание сейсмического источника в заранее определенном месте относительно скважины, развертывание по меньшей мере одного приемника в скважине и регулирование возбуждения сейсмического источника для возбуждения на заранее определенной высоте выше морского дна на основании изменений высоты, обусловленных морскими условиями. Батиметрический датчик может быть выполнен с возможностью обеспечения постоянной абсолютной высоты возбуждения сейсмического источника для компенсации изменений морских условий. Согласно еще одному аспекту исследовательская система включает в себя множество приемников, развернутых в скважине, сейсмический источник на поверхности море, систему спуска и подъема, шлангокабель, находящийся в море контроллер источника, выполненный с возможностью регулирования возбуждения сейсмического источника, блок синхронизации, в процессе работы соединенный с находящимся в море контроллером источника и выполненный с возможностью синхронизации регистрации множеством приемников в скважине и возбуждения сейсмического источника, и датчик глобальной системы позиционирования в связи с контроллером источника, при этом система выполнена с возможностью возбуждения сейсмического источника на постоянной абсолютной высоте возбуждения сейсмического источника для компенсации изменений морских условий.
Согласно аспектам настоящей заявки предусмотрен находящийся в море контроллер источника, который выполнен с возможностью возбуждения сейсмического источника только на заранее определенной высоте относительно подводных скважинных приемников. Система управления источником для скважинных сейсмических исследований включает в себя подводный сейсмический источник, по меньшей мере один приемник, развернутый в подводной скважине и выполненный с возможностью приема сейсмических волн, излучаемых подводным сейсмическим источником, стационарную систему спуска и подъема, выполненную с возможностью развертывания подводного сейсмического источника, датчик вертикальной высоты для обнаружения высотной отметки воды, в процессе работы соединенный с подводным сейсмическим источником, и контроллер источника, запрограммированный на возбуждение подводного сейсмического источника на заранее определенной высотной отметке воды на основании информации от датчика вертикальной высоты. Система управления источником для скважинных сейсмических исследований включает в себя подводный сейсмический источник, по меньшей мере один приемник, развернутый в подводной скважине и выполненный с возможностью приема сейсмических волн, излучаемых подводным сейсмическим источником, систему спуска и подъема, выполненную с возможностью развертывания сейсмического источника, и контроллер источника, выполненный с возможностью возбуждения подводного сейсмического источника на одной и той же абсолютной высоте.
Другие аспекты настоящей заявки включают в себя систему управления источником для скважинных сейсмических исследований, содержащую подводный сейсмический источник; по меньшей мере один приемник, развернутый в подводной скважине и выполненный с возможностью приема сейсмических волн, формируемых подводным сейсмическим источником; систему спуска и подъема, выполненную с возможностью развертывания сейсмического источника; и контроллер источника, выполненный с возможностью многократного возбуждения подводного сейсмического источника на одной и той же высоте. Согласно аспектам раскрытия контроллер источника может быть выполнен с возможностью многократного возбуждения подводного сейсмического источника только на одной и той же высоте. Контроллер источника может быть выполнен с возможностью многократного возбуждения подводного сейсмического источника на одной и той же абсолютной высоте. Контроллер источника может быть выполнен с возможностью многократного возбуждения подводного сейсмического источника только на одной и той же абсолютной высоте.
Краткое описание чертежей
Сопровождающими чертежами иллюстрируются некоторые варианты осуществления изобретения, и они являются частью описания.
На чертежах:
фиг.1А - упрощенный вид морской буровой установки, расположенной над скважиной, содержащей множество приемников; буровая установка показана поддерживающей исследовательскую аппаратуру вместе с поплавком во впадине волны;
фиг.1В - упрощенный вид морской буровой установки, расположенной над скважиной, содержащей множество приемников, показанный на фиг.1А; однако на фиг.1В буровая установка показана поддерживающей исследовательскую аппаратуру вместе с поплавком на гребне волны;
фиг.2 - упрощенный вид морской буровой установки, расположенной над скважиной, содержащей множество приемников; буровая установка показана поддерживающей известную сейсмическую исследовательскую аппаратуру;
фиг.3 - упрощенный вид морской буровой установки, расположенной над скважиной, содержащей множество приемников; буровая установка показана поддерживающей сейсмическую исследовательскую аппаратуру вместе с системой управления источником согласно одному аспекту настоящего изобретения;
фиг.4 - схематическая диаграмма, иллюстрирующая систему управления источником согласно одному аспекту настоящего изобретения;
фиг.5 - схематическая иллюстрация способа управления источником согласно одному аспекту настоящего изобретения;
фиг.6 - схематическая иллюстрация способа управления источником согласно другому аспекту настоящего изобретения; и
фиг.7 - схематическая иллюстрация сейсмической исследовательской системы согласно одному аспекту настоящего изобретения.
На всех чертежах одинаковыми позициями обозначены аналогичные, но не обязательно идентичные элементы. Наряду с тем, что принципы, описываемые в настоящей заявке, допускают наличие различных модификаций и вариантов, конкретные варианты осуществления изобретения показаны на чертежах только для примера и будут описаны подробно в настоящей заявке. Однако следует понимать, что изобретение не предполагается ограниченным конкретными раскрываемыми вариантами. Точнее, изобретение включает в себя все модификации, эквиваленты и варианты, попадающие в объем прилагаемой формулы изобретения.
Подробное описание
Ниже описываются иллюстративные варианты осуществления изобретения и аспекты изобретения. Конечно, должно быть понятно, что при разработке любого такого реального варианта осуществления изобретения должны быть приняты многочисленные специфические для реализации решения, чтобы достигались конкретные целевые показатели разработчика, такие как согласие с системными и деловыми ограничениями, которые будут изменяться от одной реализации к другой. Кроме того, должно быть понятно, что такая опытно-конструкторская разработка может быть сложной и требующей много времени, но тем не менее должна быть обычным делом для специалистов в данной области техники, имеющих выгоду от этого раскрытия.
Ссылка на всем протяжении описания на «один вариант осуществления изобретения», «вариант осуществления изобретения», «некоторые варианты осуществления изобретения», «один аспект» или «некоторые аспекты» означает, что конкретный признак, структура, способ или характеристика, рассматриваемая применительно к варианту осуществления изобретения или аспекту, включена в по меньшей мере один вариант осуществления изобретения настоящего изобретения. Поэтому фразы «в одном варианте осуществления изобретения» или «в варианте осуществления изобретения», или «в некоторых вариантах осуществления изобретения», обнаруживаемые в различных местах на всем протяжении описания, вместе взятые, необязательно относятся к одному и тому же варианту осуществления изобретения. Кроме того, конкретные признаки, структуры, способы или характеристики могут сочетаться любым подходящим образом в одном или нескольких вариантах осуществления изобретения. Слова «включающий» и «имеющий» должны иметь тот же самый смысл, что и слово «содержащий».
Кроме того, аспектам изобретения принадлежат не все признаки одного раскрытого варианта осуществления изобретения. Поэтому пункты формулы изобретения, следующей за подробным описанием, намеренно включены в это подробное описание, при этом каждый пункт формулы изобретения сам по себе предстает в качестве отдельного варианта осуществления этого изобретения.
Согласно некоторым аспектам предусмотрены способы и аппаратура для использования при вертикальном сейсмическом профилировании и других скважинных сейсмических исследованиях. Принципы, описанные в настоящей заявке, способствуют формированию более точной информации о сейсмическом источнике, чем это было возможно прежде, повышают точность сейсмических данных, позволяя осуществлять сложную обработку сейсмических данных. Некоторые способы и аппаратура, описанные в настоящей заявке, могут быть реализованы для коррекции или компенсации изменений морских условий и/или обеспечения синхронизации между возбуждением источника, регистрацией скважинными сейсмическими приемниками и (при желании) регистрации поверхностными сейсмическими приемниками. Однако, хотя способы и аппаратура показаны в морском исполнении, они также могут использоваться для наземных применений.
Некоторые способы и аппаратура способствуют лучшему анализу сейсмических данных за счет получения более точных форм импульсов источника. Более точные формы импульсов источника являются результатом использования системы управления источником, описанной ниже, которая может, например, изменять время возбуждения сейсмического источника до совпадения с абсолютной высотой для осуществления повторяемых взрывов или каждого взрыва при применении на море. Изменения волнения моря или вызываемые приливом и отливом изменения могут вносить шум в сейсмические данные и делать трудным или невозможным оценивание формы импульса источника. Например, волнение моря в 3 м может приводить к сдвигу во времени на 2 мс вследствие возможных различий вертикальных перемещений плавучего источника. При более сильном волнении может иметься даже более значительный эффект. Например, когда взрывы суммируют во время вертикального сейсмического профилирования со стороны буровой установки или вертикального сейсмического профилирования при смещении источника от буровой установки, изменение времени пробега для каждого взрыва приводит к размыванию сейсмических сигналов, принимаемых во время суммирования, и утрате высоких частот. Фактически, вследствие шума, который может создаваться сильным волнением, раньше морские исследования ограничивались условиями, когда волнение море составляло меньше чем приблизительно от 3 до 4 м. Точно так же морские волны с большим периодом и длиной, изменения, связанные с приливом и отливом, и другие явления могут оказывать влияние на точность времени пробега. Без компенсационных способов и аппаратуры, представленных в настоящей заявке, сейсмические сигналы, принимаемые во время суммирования, размываются, а результаты измерений времени пробега являются неточными при изменении состояния моря.
Фиг.1А-1В иллюстрируют описанные выше проблемы, касающиеся размывания и неточностей времен пробега, создаваемые изменениями морских условий. Как показано на фиг.1А, сейсмическая измерительная система (2) может включать в себя сейсмический источник (2), подвешенный под поплавком (6) на расстоянии “d” от поверхности (8) моря. Расстояние “d” между поплавком (6) и сейсмическим источником (4) остается постоянным, но абсолютная высота поплавка (6) и, следовательно, сейсмического источника (4) изменяется в зависимости от высоты поверхности (8) моря. «Абсолютная» высота означает результат измерения высоты, который не зависит от произвольных стандартов. Абсолютная высота может измеряться, например, от одной и той же фиксированной опорной точки, такой как центр Земли. Абсолютная высота не связана с другими высотами, которые могут изменяться. Точно так же, как «абсолютные» температура, давление и влажность (например) не зависят от результата любого локального или относительного измерения, абсолютная высота, используемая в настоящей заявке, может рассматриваться относительно единственной точки начала (такой как центр Земли). Поэтому абсолютная высота сейсмического источника (4), подвешенного к поплавку (6) на поверхности (8) моря, изменяется, когда поверхность моря поднимается и опускается. Однако положение морского дна (12), скважины (14) и приемников (16) в скважине (14) является фиксированным и абсолютным и не изменяется при изменениях поверхности (8) моря.
На фиг.1А поплавок (6) показан во впадине (10) поверхности (8) моря. Сейсмический источник (4), подвешенный на поплавке (6), находится на высоте “h” над приемниками (16) в скважине, когда поплавок (6) находится во впадине (10). Если сейсмический источник (4) возбуждают в нулевой момент (0) времени, формируются сигнал (18) источника и сигнал (20) волны-спутника источника. Сигнал (18) источника и сигнал (20) волны-спутника источника принимаются приемником (16) в момент “x” времени. Момент “x” времени базируется на скорости звука в море и расстоянии “h”. На фиг.1В поплавок (6) показан в другой момент времени, так что поплавок (6) расположен на гребне (24) изменяющейся поверхности (8) моря. Сейсмический источник (4) по-прежнему подвешен на поплавке и расстояние между поплавком (6) и сейсмическим источником (4) остается равным “d”. Однако теперь сейсмический источник (4) находится на высоте “h+y” над приемниками (16). Дополнительное расстояние “y” является мерой изменения высоты поверхности (8) моря вследствие, например, волн (но также может быть вызвано изменениями при приливе). Если сейсмический источник (4) опять возбуждают в нулевой момент (0) времени, сигнал (18) источника и сигнал (20) волны-спутника принимаются приемниками (16) в момент “x+альфа” времени. Сигналу (21) сейсмического источника и сигналу (23) волны-спутника требуется на значение «альфа» более длительное время для прохождения дополнительного интервала “y” воды. Таким образом, времена пробега могут изменяться вследствие изменений состояний поверхности (8) моря и могут приводить к размыванию и неточным результатам. Однако в соответствии с принципами, описанными в настоящей заявке, контроллеры многократно возбуждают сейсмические источники на одной и той же высоте (например на высоте “h” сейсмического источника (источников) (4) над приемниками (16)), так что времена пробега базируются на сигналах, проходящих одинаковое расстояние. В некоторых вариантах осуществления изобретения контроллеры возбуждают сейсмические источники только на одной и той же абсолютной высоте сейсмического источника (источников).
Теперь обратимся к фиг.2, на которой показан упрощенный вид морской буровой установки (100), расположенной над подводной скважиной (102). Скважина (102) содержит множество разнесенных приемников (103) для содействия, например, регистрации вертикального сейсмического профиля. Буровая установка (100) показана поддерживающей известную сейсмическую исследовательскую аппаратуру, в целом обозначенную позицией (104). Исследовательская аппаратура (104) включает в себя воздушную пушку или пушки (106), подвешенные ниже поверхности на поплавке (108). Аналоговый гидрофон (110) подвешен ниже воздушной пушки (106). Как обсуждалось выше, гидрофон (110) может обеспечивать частичную информацию для коррекции погрешностей в определении моментов взрывов (погрешностей, приписываемых разностям времени в случае волн с большим периодом и длиной, нерегулярным возбуждениям источника и т.д.), но недостаточно информации для деконволюции взрывов. Гидрофон (110) типичной исследовательской аппаратуры (104) автоматически не калибруется, и поэтому калибровка зависит от пользователя, который часто меняется.
Одна или несколько аналоговых линий (112) образуют часть шлангокабеля (114), который может также включать в себя воздушную линию. Аналоговые линии (112) проложены через систему спуска и подъема, такую как кран (116). Аналоговые линии (112) обеспечивают аналоговую линию связи/управления между пушками (106), гидрофоном (110), контроллером (118) пушек и процессором (120) компьютера. Контроллер (118) пушек расположен на буровой установке (100), далеко от пушек (106). В настоящее время отсутствие индикатора показаний гидрофона, или глубины пушки, или давления возле пушки, находящегося на контроллере (118) пушек или процессоре (120) компьютера, порождает эксплуатационные недостатки. Кроме того, разъединение аналоговых линий (112) при снабжении энергией воздушной пушки может приводить к неумышленному возбуждению воздушной пушки (106), что может представлять собой угрозу безопасности.
Поэтому в соответствии с известной компоновкой из фиг.2 качество сейсмических данных является недостаточным. Положение (касается прежде всего глубины) пушек (106) зависит от перемещения буровой установки, волн, работы крана и/или других факторов. До идей, описанных в настоящей заявке, не осуществлялись ни компенсация или коррекция за изменения глубины, ни компенсация за изменения давления воздуха, существовала очень ограниченная возможность синхронизации возбуждения пушек (106) и поэтому форма импульса пушек (106) и амплитуда волны были далекими от оптимальных.
Однако система управления источником согласно одному аспекту изобретения, показанная на фиг.3, способствует получению намного более точных сейсмических данных. В соответствии с компоновкой из фиг.3 также имеется морская буровая установка (100), расположенная над подводной скважиной (102), содержащей множество приемников (103). Буровая установка (100) показана поддерживающей систему управления источником, в целом обозначенную позицией (222). В соответствии с некоторыми вариантами осуществления изобретения буровая установка (100) может быть заменена подвижным судном. Система (222) управления источником включает в себя сейсмический источник, систему спуска и подъема, шлангокабель (214) и находящийся в море контроллер (218) источника для регулирования возбуждения сейсмического источника. Система (222) управления источником и скважинные приемники (103) могут быть объединены с получением скважинной исследовательской системы.
Согласно варианту осуществления изобретения из фиг.3 сейсмический источник представляет собой воздушную пушку (106), которая может быть единственной пушкой, группой пушек или любой другой компоновкой. Система спуска и подъема включает в себя кран (116) и связанную с ним установку для содействия развертыванию и извлечению системы (222) управления источником и воздушной пушки (106). Шлангокабель (214) включает в себя подвод воздуха, который в процессе работы соединен с компрессором. Предпочтительно, чтобы компрессор был расположен на буровой установке (100). Однако в отличие от типовой исследовательской аппаратуры с длинными аналоговыми линиями связи шлангокабель (214) системы (222) управления источником согласно фиг.3 включает в себя только цифровые линии связи между находящимся в море контроллером (218) источника и процессором (120) на буровой установке (100). При использовании цифровых линий исключаются всякие перекрестные помехи, потеря сигнала и возможность неумышленного возбуждения пушки при отключении линии связи. Как упоминалось выше, воздушная пушка (106) управляется находящимся в море контроллером (218) и образует сейсмические волны, которые принимаются скважинными приемниками (103) для формирования, например, вертикального сейсмического профиля.
Система (222) управления источником может также включать в себя прикрепленный поплавок (108) для поддержания в плавучем состоянии воздушной пушки (106), находящегося в море контроллера (218) и любой другой находящейся в море аппаратуры. Предпочтительно, чтобы поплавок (108) мог включать в себя навигационную систему или датчик движения, например датчик (224) глобальной системы позиционирования. Устройства системы глобального позиционирования можно без труда получить из различных источников. Устройство (224) глобальной системы позиционирования, помимо всего прочего, облегчает обнаружение изменений абсолютной высоты (вследствие, например, волн или изменений при приливе). Как упоминалось выше при обращении к фиг.1А-1В, возбуждение воздушных пушек (4) на различных абсолютных высотах или различных высотах относительно скважинных датчиков может неблагоприятно сказываться на определении формы импульса воздушной пушки (106) и/или других данных (например, времен пробега), собираемых с помощью скважинных приемников (103). Поэтому с устройства (224) глобальной системы позиционирования информация о положении подается на процессор (120) и/или находящийся в море контроллер (218) источника с тем, чтобы воздушную пушку (106) можно было возбуждать многократно на определенных абсолютных высотах и/или только на определенных абсолютных высотах. Возбуждением воздушной пушки (106) на определенных абсолютных высотах можно управлять с помощью переключателя или другого механизма, связанного с устройством (224) системы глобального позиционирования или находящимся в море контроллером (218) с тем, чтобы воздушная пушка автоматически возбуждалась на абсолютной высоте (например, на фиксированной высоте относительно приемников в скважине или фиксированной высоте над центром Земли). При обычных морских исследованиях воздушные пушки возбуждают через регулярные временные интервалы, независимо от абсолютной высоты. Добавление датчика движения согласно принципам, описанным в настоящей заявке, повышает точность определения формы импульса источника, которое рассмотрено более подробно ниже.
В дополнение к получению информации о положении устройство (224) глобальной системы позиционирования может также принимать и передавать эталон времени на находящийся в море контроллер (218), процессор (120) и/или любые навигационные подсистемы, которые могут использоваться совместно с системой (222) управления источником. Этим эталоном времени может быть, например, всемирное скоординированное время (ВСВ). Эталон всемирного скоординированного времени может подаваться на различные исследовательские подсистемы для синхронизации возбуждения воздушных пушек (106) с регистрацией данных скважинными приемниками (103). В соответствии с некоторыми вариантами осуществления изобретения также могут иметься поверхностные приемники, регистрация которыми также может быть синхронизирована с возбуждением воздушной пушки (106) с использованием эталона времени, обеспечиваемого устройством (224) системы глобального позиционирования.
Кроме того, согласно некоторым вариантам осуществления изобретения находящийся в море контроллер (218) источника может включать в себя один или несколько находящихся в море датчиков, обеспечивающих сигналы, позволяющие, помимо всего прочего, оценивать форму импульса источника. Предпочтительно, чтобы находящиеся в море датчики были расположены на находящемся в море контроллере (218) источника и сохранялась их фиксированная геометрия относительно воздушной пушки (106) или другого сейсмического источника. Один или несколько находящихся в море датчиков могут включать в себя, но без ограничения ими: калиброванный цифровой гидрофон (210), датчик (227) глубины и датчик (229) давления воздуха. Один или несколько находящихся в море датчиков могут также включать в себя короткие аналоговые линии связи к находящемуся в море контроллеру (218) источника, где сигналы могут быть преобразованы в цифровую форму на источнике для ретрансляции к процессору (120). Поэтому в соответствии с вариантом осуществления изобретения из фиг.3, если система (222) управления источником включает в себя аналоговые линии, то эти линии являются относительно короткими вместо очень длинных аналоговых линий, встречающихся в предшествующих исследовательских системах, продолжающихся на всем пути от сейсмического источника до буровой установки. Гидрофон (210) согласно настоящему изобретению обеспечивает повышенное качество сигнала в ближнем поле, поскольку он калибруется в море и преобразуется в цифровую форму около сейсмического источника. В дополнение к этому датчиком (229) давления воздуха контролируется давление воздуха, подаваемого в воздушную пушку, и представляются сведения об изменениях давления возбуждения, которые могут быть учтены при определении формы импульса источника. В соответствии с этим форма импульса источника может быть оценена более точно благодаря учету изменений временной привязки, гидродинамических изменений, изменений в подаче сжатого воздуха и т.д. путем использования калиброванного сигнала цифрового гидрофона (210) и регистрации давления воздуха на сейсмическом источнике.
Оценивание точного сигнала источника является очень важным для обработки данных вертикального сейсмического профиля. Наличие сигнала источника позволяет разделять волновые поля восходящих волн и нисходящих волн. Несостоятельные формы импульсов источника приводят к остаткам в собранных данных при фильтрации многоканальными скоростными фильтрами, используемыми для разделения волновых полей. Фактически эти остатки представляют собой шум и могут быть причиной значительного искажения обработанных результатов. При все возрастающей концентрации внимания на истинной амплитуде и периодических скважинных сейсмических измерениях форма импульса источника соответственно является очень важной для исследований вертикального сейсмического профиля. Хорошая оценка формы импульса источника с использованием способов и аппаратуры, раскрытых в настоящей заявке, повышает состоятельность формы импульса источника. Точно так же, как описано выше, неточные или размытые времена пробега можно устранять или исключать, следуя принципам, описанным в настоящей заявке.
В прошлом калибровку форм импульсов источников осуществляли путем визуального контроля качества (КК). Этот контроль включают в себя, например, поиск воздушных пушек, которые не возбудились, и обеспечение охвата частотной характеристикой нижнего и верхнего пределов. Однако такой контроль является до некоторой степени субъективным, и особенно, если эталонная форма исходного импульса в дальнем поле для воздушной пушки (106) является неизвестной. Однако в соответствии с настоящим вариантом осуществления изобретения, имеющим находящийся в море контроллер (218) источника, эталонные формы исходных импульсов в дальнем поле для воздушной пушки (106) находятся в файле на месте расположения скважины, поэтому систему (222) управления источником можно запрограммировать на автоматический контроль измеренной формы импульса источника в сравнении с эталонной формой импульса источника. При выполнении автоматического контроля гарантируется, что на каждом месте расположения скважины при задании формы импульса воздушной пушки (106) ее характеристика будет согласованной с критерием приемлемости. Калиброванные и состоятельные формы импульсов источника являются важными для оценивания изменений геологической среды при периодических исследованиях. При наличии калиброванной формы импульса источника изменения отражений сейсмических волн будут представлять изменения геологической среды, а не изменения формы импульса источника.
Формы импульсов сейсмических источников для вертикального сейсмического профилирования должны быть привязаны к поверхности, и если имеется изменение нулевого горизонта (например, когда воздушная пушка (106) поднимается и опускается при сильном волнении), то будут небольшие временные сдвиги, 1 или 2 мс. Однако изменения нулевого горизонта могут быть исключены или компенсированы путем использования устройства (224) системы глобального позиционирования или другого оборудования для измерения движения. Кроме того, до настоящего времени коррекции за лунно-солнечное притяжение не осуществлялись применительно к скважинным сейсмическим измерениям. Наряду с тем недостаток коррекций за лунно-солнечное притяжение может быть допустимым для глубоководных исследований, где в зависимости от времени суток и интенсивности прилива они могут существенно влиять на времена пробега в прибрежных районах. Поэтому согласно некоторым вариантам осуществления изобретения система (222) управления источником включает в себя датчик (227) абсолютной высоты или глубины для контроля абсолютной высоты воздушной пушки (106) (которая находится ниже поверхности воды). Датчик (227) высоты или глубины может быть, например, серийно выпускаемым батиметрическим датчиком. В таком случае изменения приливного движения также могут быть учтены в соответствии с принципами, описанными в настоящей заявке. В дополнение к этому воздушная пушка (106) может быть автоматически блокирована, если датчик (227) высоты или глубины сообщает о глубине, которая меньше заранее определенного уровня. Параметры, представляемые находящимися в море датчиками, могут автоматически отображаться на процессоре (120) для наблюдения пользователем.
В одном варианте осуществления изобретения конфигурация воздушной пушки (106) может быть компоновкой в виде группы или связки, например связкой из трех пушек. Однако также может быть использована любая другая компоновка воздушных пушек. Например, некоторые варианты осуществления изобретения могут включать в себя вертикальные группы воздушных пушек, состоящие из восьми или большего количества пушек. Способы из предшествующего уровня техники связаны ограничениями, касающимися одновременного возбуждения пушек. В настоящем изобретении находящийся в море цифровой контроллер (218) обеспечивает возможность эшелонирования возбуждения группы воздушных пушек (106), которое ранее было недоступным при использовании аналоговых контроллеров на буровой установке, у которых отсутствовала настроечная гибкость для последовательного возбуждения.
Далее обратимся к фиг.4, на которой схематически показана одна возможная конфигурация системы (400) управления источником согласно аспектам настоящего изобретения. Как показано на фиг.4, процессор (120) может быть лэптопом, выполняющим программу цифрового управления источником. Процессор (120) может управлять и/или контролировать находящиеся в море контроллер (218) и датчики, описанные выше при обращении к фиг.3, которые могут также включать в себя устройство (224, фиг.3) глобальной системы позиционирования. Предпочтительно, чтобы связной интерфейс между процессором (120) и находящимися в море контроллером (218) и датчиками (227, 229) был цифровой линией (430). Эта цифровая линия (430) может использоваться для предварительного тестирования системы при подготовке к регистрации данных. Кроме того, через другой цифровой интерфейс (434) процессор (120) может быть связан с системой (432) регистрации и построения изображений, такой как MAXIS™ (многозадачная система регистрации и построения изображений - МЗСРПИ) от Schlumberger. Как показано, система (432) регистрации и построения изображений может включать в себя цифровой интерфейс (436) данных глобальной системы позиционирования. В качестве варианта процессор (120) может содержать цифровой интерфейс (436) данных глобальной системы позиционирования (ГСП). В соответствии с изображением на фиг.4 процессор (120) и система (432) регистрации и построения изображений расположены на буровой установке, однако, как позволяют предположить наименования, находящиеся в море контроллер (218) и датчики расположены в воде вблизи воздушной пушки (106) или другого сейсмического источника. Находящиеся в море контроллер (218) и датчики также могут иметь цифровой интерфейс (438) с системой (432) регистрации и построения изображений. Этот непосредственный цифровой интерфейс (438) может обеспечивать первичное сопряжение с системой (432) регистрации и построения изображений во время регистрации данных. Исключительно аналоговый интерфейс (440) системы (400) управления источником продолжается на короткое расстояние между находящимися в море контроллером (218) и датчиками и воздушной пушкой (106).
Далее обратимся к фиг.5-6, на которых показаны схематические изображения, представляющие способы использования системы (222) управления источником и/или улучшения вертикального сейсмического профилирования. Однако должно быть понятно, что показанные и описанные способы не ограничены показанными конкретными последовательностями, и не все описанные этапы должны выполняться. Описанные этапы могут осуществляться в любой из ряда последовательностей. Согласно одному способу сейсмический источник, такой как связка воздушных пушек (фиг.3), автоматически настраивается, например, с помощью находящегося в море контроллера (218) источника. Находящийся в море контроллер (218) источника может поддерживать синхронизацию возбуждения отдельных воздушных пушек (106, фиг.3-4) путем совмещения первых максимумов давления, обнаруживаемых гидрофоном (210, фиг.3), расположенным вблизи воздушных пушек (106, фиг.3-4). «Первый» может, но не должен, означать максимум давления, который приходит первым во времени. «Первый» также может означать один.
Таким образом, согласно некоторым вариантам осуществления изобретения находящийся в море контроллер (218) источника может настраивать или синхронизировать отдельные воздушные пушки (106) путем совмещения максимумов давления путем совмещения низкочастотных максимумов образования пузырей или другими способами.
Некоторые попытки устранения проблем, связанных с образованием волн-спутников, направлены на программирование фиксированной задержки между возбуждениями воздушных пушек. Однако соленость, температура, глубина, пузыри и другие явления существенно влияют на скорость продольной волны в воде. Воздушные пузыри, образующиеся при возбуждении первой воздушной пушки, могут оказывать наиболее сильное влияние на скорость продольных волн в воде. В соответствии с этим даже фиксированная задержка возбуждения может приводить к образованию волн-спутников (образованию провалов частот) и неточным сейсмическим измерениям. Поэтому в некоторых вариантах осуществления изобретения сейсмические источники, такие как воздушные пушки, возбуждают последовательно или эшелонируют возбуждение, чтобы, по существу, максимизировать амплитуду продольной волны. Значительное повышение амплитуды дает, помимо всего прочего, увеличенную ширину полосы, уменьшение высокочастотных провалов и подъем низких частот, пониженную восприимчивость к отражениям при значительном волнении и в большей степени всенаправленную характеристику источника.
В некоторых вариантах осуществления изобретения последовательное или эшелонированное возбуждение является активным или динамическим. Распространяющуюся продольную волну измеряют для каждого возбуждения, обеспечивая регулируемое во времени возбуждение каждой воздушной пушки в эшелонированной группе с непрерывным совмещением и, по существу, максимизацией амплитуды нисходящей продольной волны.
В одном варианте осуществления изобретения воздушные пушки разнесены по вертикали и возбуждаются с динамическими задержками во времени для совмещения и/или максимизации амплитуды нисходящей продольной волны и к тому же минимизации отражения от поверхности моря. Распространяющаяся продольная волна от эшелонированной группы воздушных пушек может быть измерена с помощью находящегося в море датчика на каждой воздушной пушке (за исключением первой воздушной пушки, для которой нет необходимости осуществлять регулировку времени, если ее возбуждают первой во времени, но датчик может иметься по другим соображениям), что позволяет возбуждать следующую более глубоко расположенную воздушную пушку в группе воздушных пушек с регулированием во времени для, по существу, непрерывной максимизации амплитуды путем наложения продольных волн. В одном варианте осуществления изобретения, когда каждая воздушная пушка в эшелонированной группе расположена на соответствующем более глубоком месте относительно поверхности моря, распространяющуюся волну продолжают измерять и каждую воздушную пушку возбуждают на основании отклика от датчиков, обнаруживающих распространяющуюся волну. При регулировании возбуждения каждой более глубоко расположенной воздушной пушки уменьшаются эффекты образования волн-спутников, связанные с вертикальным развертыванием воздушных пушек. Кроме того, в блоке синхронизации результаты измерений нисходящей продольной волны находящимися в море датчиками могут использоваться для синхронизации возбуждения эшелонированной группы с регистрацией на приемниках в скважине.
Обратимся к фиг.7, где сейсмическая система, такая как сейсмическая исследовательская система (300), может быть автономной или частью исследовательской аппаратуры, такой как исследовательская аппаратура (104, фиг.2), описанная выше с обращением к фиг.2. Сейсмическая исследовательская система (300) из фиг.7 может заменить некоторые или все подводные компоненты, описанные выше с обращением к фиг.3. Сейсмическая исследовательская система (300) может содержать первый сейсмический источник, такой как первая воздушная пушка (n), которая находится ближе всего к поверхности (304) моря. Сейсмическая исследовательская система (300) может также содержать группу (305) сейсмических источников или воздушных пушек и поэтому включает в себя по меньшей мере вторую воздушную пушку (n+1), отстоящую по вертикали от первой воздушной пушки (n). Группа (305) может включать в себя любое количество сейсмических источников, в том числе три источника, показанных на фиг.7. В одном варианте осуществления изобретения первый сейсмический датчик, такой как первый гидрофон (306), может быть расположен на второй воздушной пушке (n+1). В дополнение к этому в одном варианте осуществления изобретения контроллер, такой как находящийся в море контроллер (218), в процессе работы соединен с первой и второй воздушными пушками (n, n+1) и первым гидрофоном (306). Находящийся в море контроллер (218) может быть заменен контроллером, который не находится под водой. Воздушные пушки (n, n+1 и т.д.) могут быть подвешены на поплавке (301) с помощью подвесных цепей (303). Кроме того, поплавок (301) может быть прикреплен к подъемным цепям (307), которые обеспечивают возможность развертывания и извлечения поплавка (301), находящегося в море контроллера (218) и группы воздушных пушек (n, n+1 и т.д.). Один или несколько датчиков могут быть расположены на поплавке (301), например устройство (224) системы глобального позиционирования и датчик движения или батиметрический датчик (227).
Находящийся в море контроллер (218) управляет временами возбуждения каждой из воздушных пушек (n, n+1 и т.д.) и принимает отклик от первого гидрофона (306) (а в некоторых вариантах осуществления изобретения с дополнительных гидрофонов и других датчиков). Когда находящийся в море контроллер (218) возбуждает первую воздушную пушку (n), она создает распространяющуюся продольную волну (302). Первый гидрофон (306) измеряет распространяющуюся продольную волну (302) и передает данные о распространяющейся продольной волне на находящийся в море контроллер (218). Находящийся в море контроллер осуществляет контроль данных о распространяющейся продольной волне и ступенчато регулирует время возбуждения следующей воздушной пушки (n+1) на основании отклика от первого гидрофона (306). Таким образом, находящийся в море контроллер (218) может возбуждать вторую воздушную пушку (n+1) с обеспечением совмещения и/или, по существу, максимизации амплитуды нисходящих продольных волн путем наложения. Например, в некоторых вариантах осуществления изобретения находящийся в море контроллер (218) возбуждает или запрограммирован на возбуждение второй (n+1) и последующих воздушных пушек (n+2 и т.д.) с обеспечением совмещения первых максимумов давления всех сейсмических источников. Эта процедура может продолжаться и повторяться для любого числа дополнительных воздушных пушек, каждая из которых имеет связанный с ней гидрофон. Однако гидрофоны также могут быть размещены независимо от воздушных пушек и все же представлять полезную информацию на находящийся в море контроллер для задержанного возбуждения последующих воздушных пушек.
На фиг.7 показаны третья воздушная пушка (n+2) и связанный с ней второй гидрофон (308) и третий гидрофон (310), который может быть связан с дополнительной (не показана) воздушной пушкой. Воздушные пушки могут быть размещены все глубже и глубже с постоянным или переменным интервалом. Поскольку находящийся в море контроллер (218) динамически регулирует времена возбуждения каждой воздушной пушки на основании отклика от сейсмических датчиков, то интервал между воздушными пушками не должен быть постоянным, и изменения скорости волны вследствие пузырей (особенно когда воздушные пушки возбуждаются), солености, температуры и других факторов учитываются, так как каждая воздушная пушка (после первой (n)) возбуждается на основании отклика или данных от фактической распространяющейся волны вследствие возбуждения последней воздушной пушки (пушек).
В одном варианте осуществления изобретения блок синхронизации, такой как устройство (224, фиг.3) глобальной системы позиционирования вблизи поверхности (304), может принимать отклик от находящегося в море контроллера (218) для синхронизации возбуждения эшелонированной группы (305) с регистрацией приемниками (103, фиг.3) в скважине (102, фиг.3). В одном варианте осуществления изобретения скважинные приемники (103, фиг.3) содержат акселерометрические датчики на основе геофонов от Schlumberger Technology Corporation, измеренная характеристика которых является плоской до 3 Гц. Другие приемники также могут использоваться.
В одном варианте осуществления изобретения объем камеры воздушной пушки для каждой отдельной воздушной пушки (n, n+1, n+2 и т.д.) регулируется от одной воздушной пушки к следующей. Объем камеры воздушной пушки можно выбирать для компенсации изменений формы импульса источника, обусловленных повышением давления воды с глубиной. Для оптимизации сигналов источника специалист в данной области техники, имеющий выгоду от этого раскрытия, может выбирать и изменять объем камеры воздушной пушки на основании глубины.
Принципы, описанные в настоящей заявке, могут найти применение при всех скважинных сейсмических исследованиях, а также для решения других прикладных задач. Принципы, описанные в настоящей заявке, обеспечивают получение высококачественных состоятельных форм импульсов источников даже при изменяющихся состояниях поверхности моря. При исследованиях на глубоководных площадях и в глубоких скважинах можно получать выгоду от принципов, описанных в настоящей заявке. При использовании известных аппаратуры и способов форма импульса сейсмического источника может быть нарушенной под влиянием затухания и фильтрации среды. Однако принципы и аппаратура, представленные в настоящей заявке, могут позволять преодолевать недостатки, связанные с известной аппаратурой. Кроме того, принципы, описанные в настоящей заявке, могут найти применение при анализе зависимости амплитуды от удаления, когда состоятельность измеряемого сигнала источника является решающей. Принципы также могут быть полезными при инверсиях и прогностическом анализе (прогнозировании с опережением глубины скважины), когда сильный низкочастотный сигнал формы импульса является необходимым при интерпретации.
Некоторые способы использования системы (222, фиг.3) управления источником или улучшения вертикального сейсмического профилирования могут дополнительно включать в себя измерение давления воздушной пушки (106 на фиг.3; n, n+1 и т.д. на фиг.7) непосредственно на источнике. Измерение давления воздушной пушки (106 на фиг.3; n, n+1 и т.д. на фиг.7) может быть облегчено, например, датчиком (229, фиг.3) давления из компоновки находящихся в море датчиков, описанной выше с обращением к фиг.3. Глубина воздушной пушки (106 на фиг.3; n, n+1 и т.д. на фиг.7) также может быть измерена непосредственно на источнике. Измерение глубины воздушной пушки (106 на фиг.3; n, n+1 и т.д. на фиг.7) может быть облегчено, например, батиметрическим датчиком или другим датчиком (227, фиг.3) глубины, описанными выше. Некоторые способы могут также включать в себя объединение возбуждения воздушной пушки (106 на фиг.3; n, n+1 и т.д. на фиг.7) с навигационной системой для содействия возбуждению воздушной пушки (106 на фиг.3; n, n+1 и т.д. на фиг.7) в точное время или в точном абсолютном вертикальном положении, или в то время и в том положении, или ни в то время, ни в том положении. Некоторые преимущества возбуждения воздушной пушки (106 на фиг.3; n, n+1 и т.д. на фиг.7) или другого сейсмического источника только в точных абсолютных положениях описаны выше.
Навигационная система для содействия возбуждению воздушной пушки (106 на фиг.3; n, n+1 и т.д. на фиг.7) в определенных вертикальных положениях может быть, например, устройством (224, фиг.3) глобальной системы позиционирования, рассмотренным при обращении к фиг.3, которое принимает и передает данные о точном положении. Устройство (224, фиг.3) глобальной системы позиционирования может также принимать и передавать эталон времени, например всемирное скоординированное время. Поэтому воздушная пушка (106 на фиг.3; n, n+1 и т.д. на фиг.7) может управляться в соответствии с информацией о времени и положении, принимаемой от устройства (224, фиг.3) глобальной системы позиционирования, и возбуждаться только на определенной, заранее заданной абсолютной высоте (например, на фиксированных высотах относительно приемников в скважине) для уменьшения или исключения погрешностей временного сдвига. Кроме того, как упоминалось выше, в соответствии с некоторыми способами возбуждение каждой воздушной пушки (106 на фиг.3; n, n+1 и т.д. на фиг.7) может быть поочередным во времени и синхронизировано с регистрацией скважинными сейсмическими приемниками в соответствии со всемирным скоординированным временем или другим эталоном времени. Индексирование данных в соответствии с эталоном времени облегчает предварительную сортировку данных для обработки. Индексирование характеристик источника и регистрации приемниками в соответствии с эталоном времени также позволяет объединять эти данные в единый массив данных или файл, в результате чего облегчается анализ, представление информации или обработка данных. В таком случае статистический анализ контроля качества характеристик поверхностного источника и характеристик скважинного приемника (103, фиг.3) может быть совместным. В некоторых случаях возбуждение воздушной пушки (106 на фиг.3; n, n+1 и т.д. на фиг.7) также может быть синхронизировано с регистрацией поверхностным сейсмическим приемником. Поэтому в таком случае статистический анализ качества может быть выполнен для синхронизированного массива данных, включающего в себя сигнал поверхностного источника, сигналы, принимаемые поверхностными приемниками, и сигналы, принимаемые скважинными приемниками.
В соответствии с некоторыми способами осуществляют коррекцию за изменения формы импульса источника. Изменения формы импульса источника могут быть следствием, например, изменений давления воздуха при возбуждении, изменений температуры, значительного волнения или изменений приливных явлений. Коррекция может включать в себя калибровку сигнала датчика в ближнем поле, принимаемого гидрофоном (210, фиг.3; 306-310, фиг.7), расположенным на воздушной пушке (106 на фиг.3; n, n+1 и т.д. на фиг.7) или другом сейсмическом источнике, в соответствии с фиксированной геометрией воздушной пушки (106 на фиг.3; n, n+1 и т.д. на фиг.7) относительно гидрофона (210, фиг.3; 306-310, фиг.7). Гидрофон (210, фиг.3; 306-310, фиг.7) может быть частью находящегося в море модуля датчиков, рассмотренного выше. Коррекция может также включать в себя восстановление формы импульса в дальнем поле для воздушной пушки (106 на фиг.3; n, n+1 и т.д. на фиг.7) или другого источника по измеренной форме импульса в ближнем поле и поддержание истинной амплитуды для сейсмической калибровки на поверхности, исследования зависимости амплитуды от удаления и периодические наблюдения. Кроме того, коррекции формы импульса могут быть выполнены путем сравнения измеренных форм импульсов источников с эталонной формой импульса источника, где эталонная форма импульса основана на эталонной форме импульса в дальнем поле для сейсмического источника в файле на месте расположения скважины.
Предшествующее описание было представлено только для иллюстрации и пояснения некоторых вариантов осуществления изобретения. Оно не предполагается исчерпывающим или ограничивающим изобретение любой определенной раскрытой формой. Многие модификации и варианты являются возможными в свете описанной выше идеи.
Варианты осуществления изобретения и аспекты были выбраны и описаны для наилучшего пояснения принципов изобретения и его практического применения. Предшествующее описание предназначено для обеспечения возможности специалистам в данной области техники наилучшего использования принципов в различных вариантах осуществления изобретения и аспектах и с различными модификациями, пригодными для предполагаемого конкретного использования. Имеется в виду, что объем изобретения будет определяться нижеследующей формулой изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБЫ И УСТРОЙСТВА УПРАВЛЕНИЯ ИСТОЧНИКОМ ДЛЯ СКВАЖИННОЙ СЕЙСМОРАЗВЕДКИ | 2004 |
|
RU2358291C2 |
| СПОСОБ КОРРЕКТИРОВКИ СЕЙСМИЧЕСКИХ ДАННЫХ ПРИ МОРСКОЙ СЕЙСМИЧЕСКОЙ РАЗВЕДКЕ | 2002 |
|
RU2282877C2 |
| ГРУППА ИСТОЧНИКОВ ДЛЯ МОРСКОЙ СЕЙСМИЧЕСКОЙ РАЗВЕДКИ | 2017 |
|
RU2739725C2 |
| ГЕОФИЗИЧЕСКАЯ СИСТЕМА РЕГИСТРАЦИИ ДАННЫХ | 2004 |
|
RU2341814C2 |
| СПОСОБ СЕЙСМИЧЕСКИХ ИССЛЕДОВАНИЙ НА АКВАТОРИЯХ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2592739C1 |
| СЕЙСМОКОСА, ОТСЛЕЖИВАЮЩАЯ МОРСКОЕ ДНО | 2007 |
|
RU2451309C2 |
| СЕЙСМИЧЕСКИЙ ДАТЧИК С ДАТЧИКАМИ ПЕРЕМЕЩЕНИЯ СНИЖЕНИЯ ШУМА | 2014 |
|
RU2678261C2 |
| СПОСОБ БЕСПРОВОДНОЙ СВЯЗИ В ПОДВОДНОЙ СРЕДЕ И СИСТЕМА ДЛЯ ПОДВОДНОЙ БУРОВОЙ СКВАЖИНЫ, ОБЕСПЕЧИВАЮЩАЯ БЕСПРОВОДНУЮ СВЯЗЬ (ВАРИАНТЫ) | 2005 |
|
RU2323336C2 |
| СПОСОБ СЕЙСМИЧЕСКОЙ РАЗВЕДКИ ПРИ ПОИСКЕ УГЛЕВОДОРОДОВ И СЕЙСМИЧЕСКИЙ КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2431868C1 |
| ДИНАМИЧЕСКИ УПРАВЛЯЕМЫЕ КРЫЛЬЕВЫЕ СИСТЕМЫ И СПОСОБЫ | 2016 |
|
RU2729696C2 |
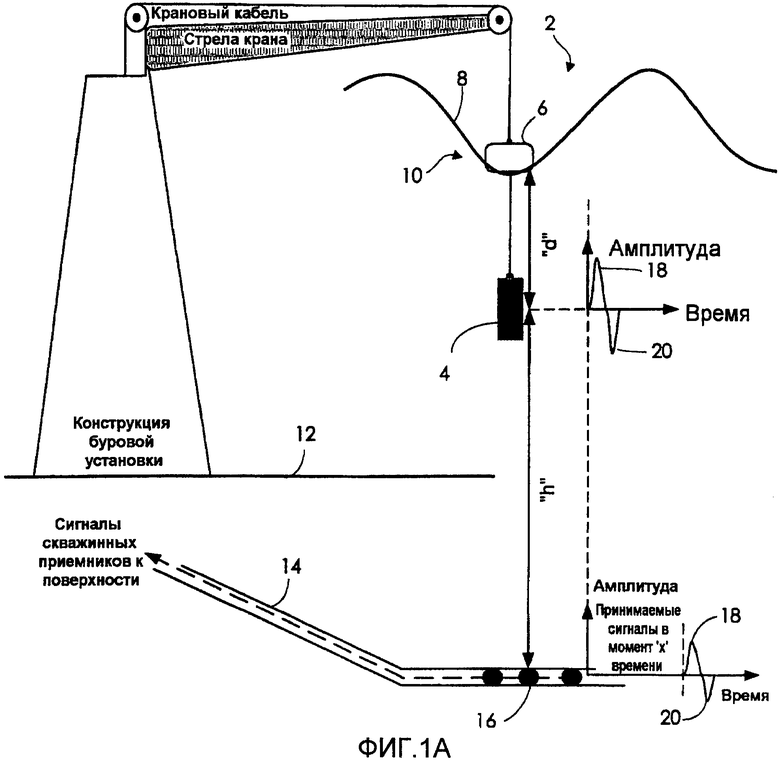
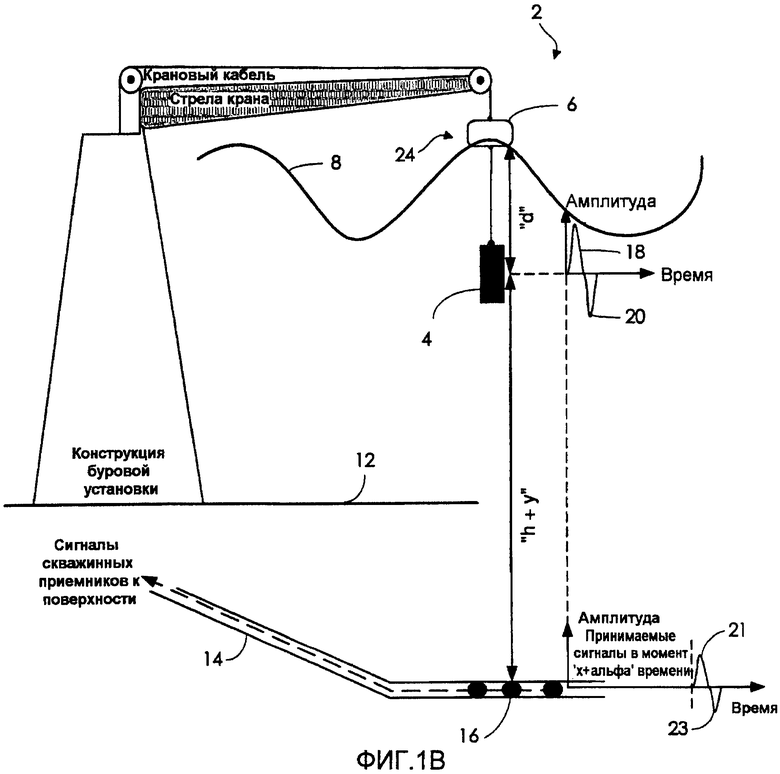
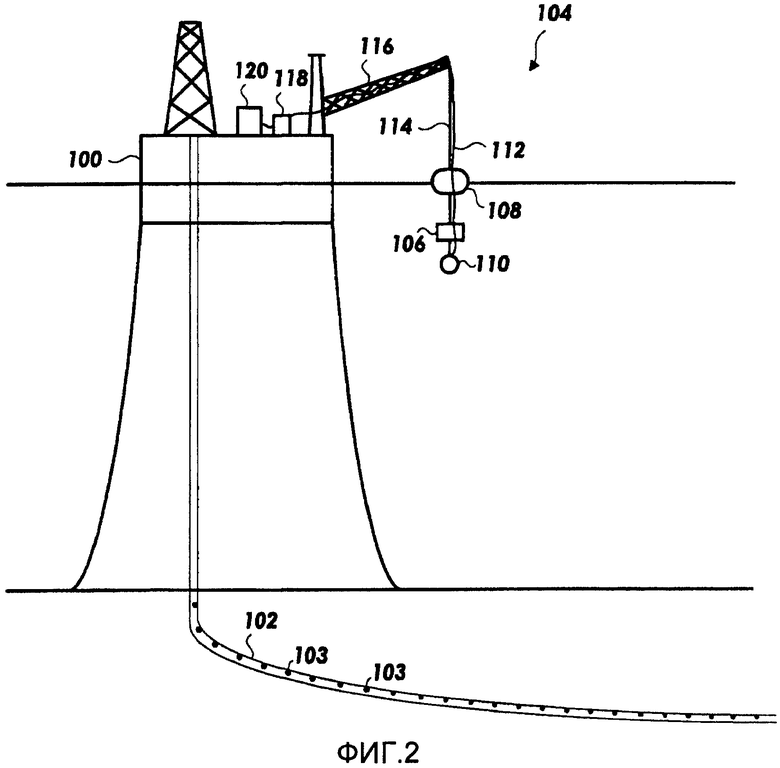
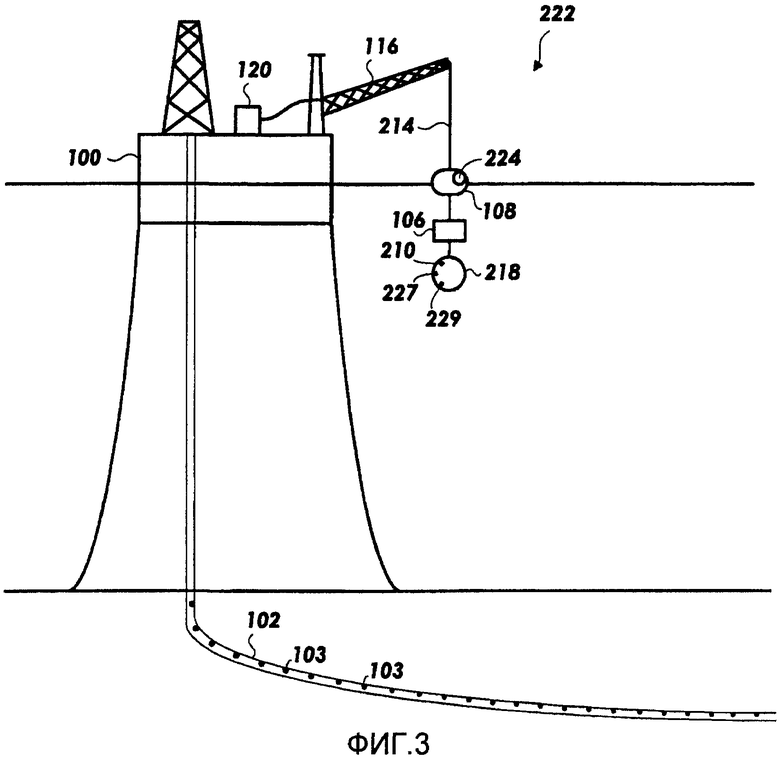
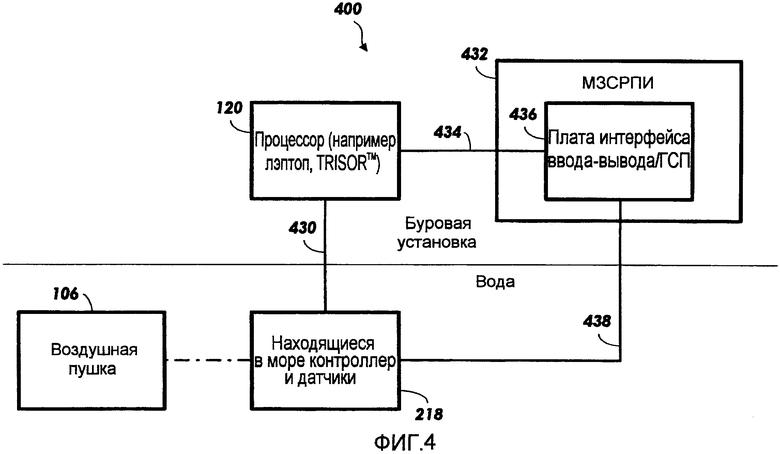
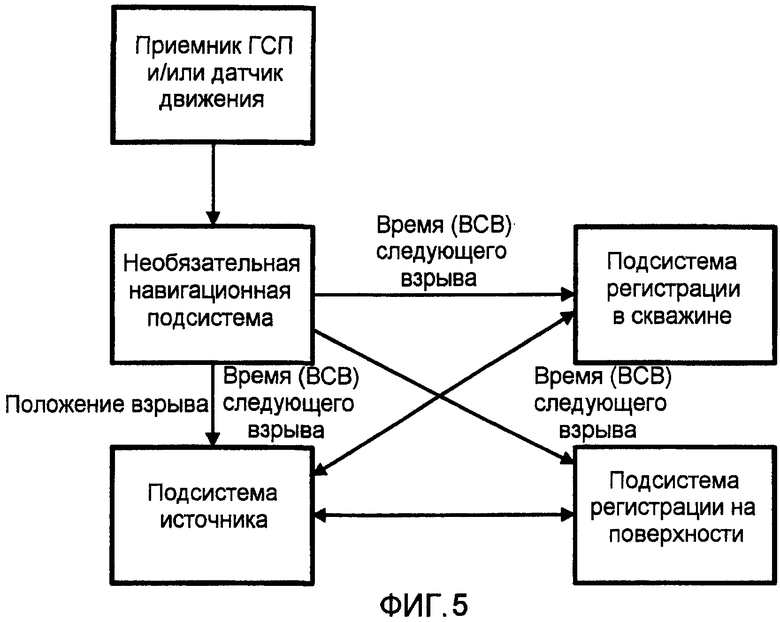
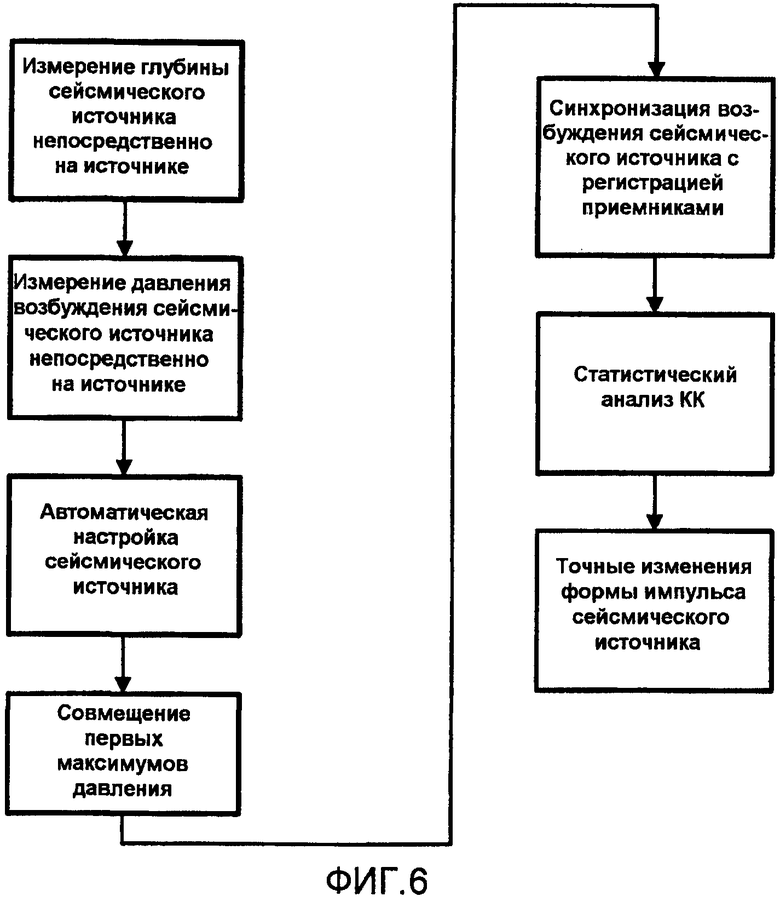
Изобретение относится к области геофизики и может быть использовано при поиске углеводородсодержащих продуктивных пластов. В данном решении раскрыты способы и устройство для управления возбуждениями сейсмических источников. Способы и устройство обеспечивают возможность возбуждения сейсмических источников с повышением амплитуды продольной волны. Некоторые способы и аппаратура позволяют уменьшать образование волн-спутников и осуществлять совмещение первых максимумов давления от большого количества сейсмических источников. Многочисленные сейсмические источники могут быть возбуждены последовательно в соответствии с механизмами активной обратной связи. Технический результат: получение более точных сейсмических данных и более состоятельной формы импульса сейсмического источника. 4 н. и 26 з.п. ф-лы, 7 ил.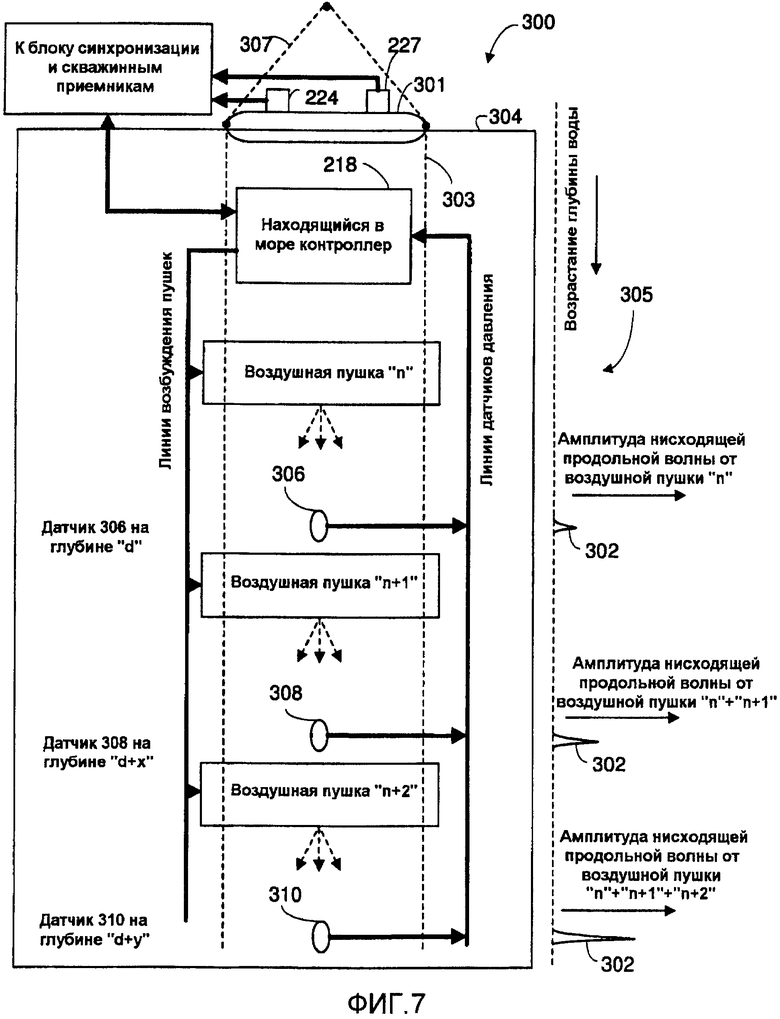
1. Сейсмическая система, содержащая первый сейсмический источник, второй сейсмический источник, отстоящий по вертикали от первого сейсмического источника, первый сейсмический датчик на втором сейсмическом источнике, контроллер, функционально соединенный с первым и вторым сейсмическими источниками и первым сейсмическим датчиком, причем контроллер запрограммирован на возбуждение первого сейсмического источника и регулирование времени возбуждения второго сейсмического источника на основании отклика от первого сейсмического датчика.
2. Сейсмическая система по п.1, в которой контроллер запрограммирован на настройку или синхронизацию времени возбуждения второго сейсмического источника на основании отклика от первого сейсмического датчика.
3. Сейсмическая система по п.1, в которой контроллер запрограммирован на регулирование времени возбуждения второго сейсмического источника на основании отклика от первого сейсмического датчика для совмещения первого максимума давления от второго сейсмического источника с первым максимумом давления от первого сейсмического источника.
4. Сейсмическая система по п.1, в которой контроллер запрограммирован на регулирование времени возбуждения второго сейсмического источника на основании отклика от первого сейсмического датчика.
5. Сейсмическая система по п.1, дополнительно содержащая третий сейсмический источник, отстоящий по вертикали от второго сейсмического источника, второй сейсмический датчик на третьем сейсмическом источнике, при этом контроллер функционально соединен с третьим сейсмическим источником и вторым сейсмическим датчиком, причем контроллер запрограммирован на регулирование времени возбуждения второго сейсмического источника на основании отклика от первого сейсмического датчика для совмещения первого максимума давления от второго сейсмического источника с первым максимумом давления от первого сейсмического источника, причем контроллер запрограммирован на регулирование времени возбуждения третьего сейсмического источника на основании отклика от второго сейсмического датчика для совмещения первого максимума давления от третьего сейсмического источника с первыми максимумами давления от первого и второго сейсмических источников.
6. Сейсмическая система по п.5, в которой каждый из сейсмических источников содержит камеру воздушной пушки различного объема для компенсации изменений формы импульса источника, обусловленных повышением давления воды с увеличением глубины.
7. Сейсмическая система по п.1, в которой контроллер представляет собой находящийся в море контроллер.
8. Сейсмическая система по п.1, в которой первый и второй сейсмические источники содержат находящиеся в море воздушные пушки.
9. Сейсмическая система по п.1, дополнительно содержащая множество приемников, развернутых в скважине, блок синхронизации, функционально соединенный с множеством приемников и контроллером, причем блок синхронизации синхронизирует возбуждение эшелонированных сейсмических источников с регистрацией множеством приемников в скважине.
10. Сейсмическая система по п.1, дополнительно содержащая множество дополнительных разнесенных по вертикали сейсмических источников, сейсмический датчик на каждом из множества дополнительных разнесенных по вертикали сейсмических источников, при этом контроллер функционально соединен с каждым из множества дополнительных сейсмических источников и каждым сейсмическим датчиком, причем контроллер запрограммирован на регулирование времени возбуждения каждого из множества дополнительных разнесенных по вертикали сейсмических источников на основании отклика от сейсмических датчиков для совмещения первых максимумов давления от каждого из множества дополнительных разнесенных по вертикали сейсмических источников с первым максимумом давления от первого сейсмического источника.
11. Сейсмическая система по п.10, в которой каждый из сейсмических источников содержит камеру воздушной пушки различного объема для компенсации изменений формы импульса источника, обусловленных повышением давления воды с увеличением глубины.
12. Сейсмическая исследовательская система, содержащая множество приемников, развернутых в подводной скважине, группу сейсмических источников, установленных в линию по вертикали в море около поверхности, по меньшей мере один сейсмический датчик на одном или нескольких отдельных источниках из группы сейсмических источников, находящийся в море контроллер источников, выполненный с возможностью последовательного возбуждения отдельных источников из группы сейсмических источников и совмещения первых максимумов давления от отдельных источников.
13. Исследовательская система по п.12, в которой по меньшей мере один сейсмический датчик содержит сейсмический датчик на каждом отдельном источнике, за исключением первого отдельного источника, при этом сейсмические датчики обеспечивают отклик к находящемуся в море контроллеру источников для содействия совмещению первых максимумов давления.
14. Исследовательская система по п.12, в которой находящийся в море контроллер источников принимает отклик от постепенно заглубляющихся датчиков из по меньшей мере одного сейсмического датчика и регулирует возбуждение отдельных источников в ответ на отклик для совмещения первых максимумов давления.
15. Исследовательская система по п.12, причем система находится в фиксированной горизонтальной системе координат.
16. Исследовательская система по п.12, в которой находящийся в море контроллер источников запрограммирован на многократное возбуждение группы сейсмических источников на одной и той же абсолютной высоте.
17. Исследовательская система по п.12, дополнительно содержащая блок синхронизации, функционально соединенный с множеством приемников и контроллером, причем блок синхронизации синхронизирует последовательное возбуждение источников с регистрацией множеством приемников, развернутых в подводной скважине.
18. Исследовательская система по п.12, в которой находящийся в море контроллер источников выполнен с возможностью динамического изменения последовательного возбуждения отдельных источников из группы сейсмических источников для совмещения первых максимумов давления от отдельных источников.
19. Способ управления возбуждением находящихся в море сейсмических источников, содержащий этапы, на которых осуществляют динамическое эшелонированное возбуждение находящейся в море группы сейсмических источников, повышают амплитуду продольной волны, создаваемой при эшелонированном возбуждении.
20. Способ управления возбуждением находящихся в море сейсмических источников по п.19, в котором на этапе динамического эшелонированного возбуждения принимают отклик от одного или нескольких сейсмических датчиков, локальных по отношению к находящейся в море группе, и эшелонируют последовательность возбуждения находящейся в море группы сейсмических источников на основании отклика.
21. Способ управления возбуждением находящихся в море сейсмических источников по п.19, в котором на этапе динамического эшелонированного возбуждения принимают сейсмический отклик от множества сейсмических датчиков, при этом имеется по меньшей мере один из множества сейсмических датчиков, связанных со всеми, кроме первого отдельного источника из находящейся в море группы, эшелонируют последовательность возбуждения находящейся в море группы сейсмических источников на основании отклика.
22. Способ управления возбуждением находящихся в море сейсмических источников по п.19, в котором на этапе динамического эшелонированного возбуждения возбуждают первый отдельный сейсмический источник из находящейся в море группы, обнаруживают первый максимум давления, получающийся в результате возбуждения первого отдельного сейсмического источника, передают данные о первом максимуме давления на контроллер, возбуждают второй отдельный сейсмический источник из находящейся в море группы на основании данных о первом максимуме давления.
23. Способ управления возбуждением находящихся в море источников по п.19, в котором на этапе динамического эшелонированного возбуждения возбуждают первый сейсмический источник из находящейся в море группы, обнаруживают первый максимум давления, получающийся в результате возбуждения первого сейсмического источника, передают данные о первом максимуме давления на контроллер, возбуждают второй сейсмический источник из находящейся в море группы на основании данных о первом максимуме давления, причем на этапе повышения амплитуды продольной волны совмещают первый максимум давления от второго сейсмического источника с первым максимумом давления от первого сейсмического источника.
24. Способ управления возбуждением находящихся в море источников по п.19, в котором на этапе динамического эшелонированного возбуждения возбуждают первый сейсмический источник из находящейся в море группы, обнаруживают первый максимум давления, получающийся в результате возбуждения первого сейсмического источника, передают данные о первом максимуме давления на контроллер, возбуждают второй сейсмический источник из находящейся в море группы на основании данных о первом максимуме давления, обнаруживают первый максимум давления, получающийся в результате возбуждения первого и второго сейсмических источников, передают данные о первом максимуме давления, полученном в результате возбуждения первого и второго сейсмических источников, на контроллер, возбуждают третий сейсмический источник из находящейся в море группы на основании данных о первом максимуме давления, полученном в результате возбуждения первого и второго сейсмических источников, причем на этапе повышения амплитуды продольной волны совмещают первые максимумы давления от второго и третьего сейсмических источников с первым максимумом давления от первого сейсмического источника.
25. Способ управления возбуждением находящихся в море сейсмических источников по п.19, в котором на этапе динамического эшелонированного возбуждения: а) возбуждают сейсмический источник из находящейся в море группы; b) обнаруживают первый максимум давления, получающийся в результате возбуждения сейсмического источника; с) передают данные о первом максимуме давления на контроллер; d) возбуждают последующий сейсмический источник из находящейся в море группы на основании данных о первом максимуме давления; е) повторяют этапы (a)-(d) для каждого сейсмического источника из находящейся в море группы; и причем на этапе повышения амплитуды продольной волны совмещают первые максимумы давления от каждого сейсмического источника.
26. Способ управления возбуждением находящихся в море сейсмических источников по п.19, в котором на этапе осуществления динамического эшелонированного возбуждения: а) возбуждают первую воздушную пушку под водой на первой глубине, ближайшей к поверхности; b) контролируют первую продольную волну от первой воздушной пушки первым датчиком; с) обеспечивают отклик данных о контролируемой первой продольной волне на контроллер; d) возбуждают вторую воздушную пушку на второй глубине, при этом вторая глубина находится глубже, чем первая глубина, на основании данных о контролируемой первой продольной волне для, по существу, максимизации амплитуды волны путем наложения продольных волн от первой и второй воздушных пушек; е) принимают данные о волне, относящиеся к подземному пласту, получающиеся в результате возбуждения воздушных пушек.
27. Способ управления возбуждением находящихся в море сейсмических источников по п.26, дополнительно содержащий этапы, на которых последовательно возбуждают дополнительные воздушные пушки, каждую глубже, чем последнюю, на основании данных о контролируемой продольной волне от предшествующих возбуждений для дальнейшей, по существу, максимизации амплитуды волны путем наложения продольных волн от всех воздушных пушек.
28. Способ возбуждения воздушной пушки, являющейся сейсмическим источником, содержащий этапы, на которых возбуждают воздушную пушку под водой на первом месте, измеряют нисходящую продольную волну, получающуюся в результате возбуждения воздушной пушки на втором, более глубоком месте, последовательно возбуждают дополнительные воздушные пушки, активно регулируют время возбуждения каждой последовательно возбуждаемой дополнительной воздушной пушки для непрерывного совмещения максимумов давления от всех воздушных пушек.
29. Способ по п.28, в котором на этапе активного регулирования дополнительно повышают амплитуду нисходящей продольной волны.
30. Способ по п.28, в котором на этапе активного регулирования подают результаты измерений нисходящей продольной волны на последовательно более глубоких местах на контроллер воздушных пушек.
| Способ приготовления мыла | 1923 |
|
SU2004A1 |
| Способ приготовления мыла | 1923 |
|
SU2004A1 |
| Карточка для статистических и т.п. записей | 1926 |
|
SU8398A1 |
| СПОСОБ СЕЙСМИЧЕСКОЙ РАЗВЕДКИ | 1996 |
|
RU2122220C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДИЭЛЕКТРИЧЕСКОЙ ПРОНИЦАЕМОСТИ СЫПУЧИХ ВЕЩЕСТВ | 0 |
|
SU266054A1 |
| US 6603707 B1, 05.08.2003. | |||

