Изобретение относится к области машиностроения, в частности сельскохозяйственного машиностроения, например к машинам для уборки и переработки сельскохозяйственных культур, а также может быть использовано в других областях, где применяются ротационные рабочие элементы, взаимодействующие с неподвижными элементами, для транспортировки и обработки сырья и материалов.
Известна конструкция подборщика сельскохозяйственных культур (А.С. 1750479, МПК A01D 89/00, СССР, 1992), рабочая поверхность пальцев которого включает два участка: криволинейный, выполненный по эвольвенте окружности, и прямолинейный. Скаты подборщика включают прямолинейную и сопряженную с ней криволинейную часть, выполненную по укороченной эвольвенте окружности. Прямолинейные концы пальцев взаимодействуют с криволинейной частью скатов. Часть рабочей поверхности пальцев, имеющей криволинейный профиль, взаимодействует с прямолинейным участком скатов. Сочетание прямолинейных и криволинейных поверхностей позволяет пальцу в момент подбора захватывать стебли без их относительного скольжения по прямолинейному концу пальца, затем транспортировать по прямолинейной части ската стебли, скользящие по криволинейной части пальца.
Однако такое исполнение пальцев способствует захвату камней и других предметов нерастительного происхождения с поверхности почвы в момент подбора валка. Последовательное (по ходу движения обрабатываемого материала) исполнение скатов прямолинейными и криволинейными не полностью совпадает с траекторией движения слоя обрабатываемого материала, что приводит к изгибным деформациям материала, разрыву его слоя и, как следствие, к потерям обрабатываемого материала и нарушению технологического процесса. Кроме того, выполнение профиля криволинейной поверхности по «укороченной эвольвенте» окружности не дает абсолютного постоянства угла между касательными к рабочим поверхностям взаимодействующих элементов. В частности, установлено, что при увеличении текущего угла поворота радиуса окружности, входящего в формулу для определения координат «укороченной эвольвенты», от π/8 до 7 π/8 ошибка в расчетной координате составляет от 1,7 до 11,0% [Копченов А.А. Улучшение технологического процесса и обоснование параметров барабанного подборщика с равномерно вращающимися пальцами //Диссертация на соискание ученой степени кандидата технических наук. - Челябинск, 1991. - С.68].
Наиболее близким по технической сущности является ротационный рабочий орган (Патент РФ 2056090, МПК A01D 89/00), который содержит смонтированные с возможностью взаимодействия между собой рабочие элементы, одни из которых установлены на валу, ось которого не пересекает поверхность неподвижных элементов. Причем одни элементы выполнены криволинейной, а другие - прямолинейной формы, криволинейные и прямолинейные элементы расположены с возможностью обеспечения постоянного угла между касательными, проведенными к рабочим поверхностям криволинейных элементов в точке их пересечения с прямолинейными элементами, и прямолинейными элементами.
Недостатком данного рабочего органа является невозможность точного задания формы поверхности рабочих элементов устройства, а также невозможность обеспечения надежности технологического процесса, в частности, в условиях непостоянства действия сил взаимодействия обрабатываемого материала и рабочих элементов. Именно при движении материала по криволинейной поверхности в результате изменения направления действия силы тяжести величины силы инерции либо воздействия внешних по отношению к рассматриваемой системе (рабочий орган - обрабатываемый материал) сил изменяется направление и абсолютная величина равнодействующей сил трения обрабатываемого материала и рабочих элементов. В результате обрабатываемый материал скользит по поверхности одного из элементов, например подвижного криволинейного, и не может транспортироваться по прямолинейной поверхности неподвижного элемента.
Целью изобретения является повышение надежности технологического процесса за счет точного определения координат точек рабочей поверхности путем использования аналитической зависимости координат от параметров кривизны рабочих поверхностей, определяемых свойствами обрабатываемого материала, исключения защемления обрабатываемого материала различной структуры и свойств при его транспортировании и оптимизации траектории движения материала.
Изобретение содержит смонтированные с возможностью взаимодействия между собой рабочие элементы, одни из которых установлены на валу, ось которого не пересекает поверхность неподвижных элементов, с обеспечением постоянства угла между касательными к рабочим поверхностям элементов в точке их пересечения.
Профиль рабочей поверхности криволинейных элементов выполнен по кривой, являющейся логарифмической разверткой эвольвенты и определяемой уравнением
где r - радиус окружности с центром, лежащим на оси вращения вала;
φ - текущий угол поворота радиуса г,
γ - угол, образованный касательными к поверхностям взаимодействующих элементов в точке их пересечения;
е - основание натурального логарифма.
В зависимости от условий работы и свойств обрабатываемого материала подвижные и неподвижные рабочие элементы состоят из нескольких участков с рабочей поверхностью прямолинейной и (или) криволинейной формы, располагающихся в различной последовательности и попарно сочетающихся с участками соответственно неподвижных и подвижных элементов с криволинейной и прямолинейной формой рабочей поверхности.
Исполнение профиля рабочей поверхности одних из рабочих элементов прямолинейным, а других криволинейным с обеспечением постоянства угла между касательными, проведенными к рабочим поверхностям элементов в точке их пересечения, позволяет исключить защемление обрабатываемого материала между взаимодействующими элементами.
Исполнение профиля рабочих поверхностей криволинейных элементов
по логарифмической развертке эвольвенты, задаваемой аналитическим выражением
позволяет поддерживать постоянство величины угла между касательными к рабочим поверхностям элементов в точке их пересечения. Причем величина данного утла в зависимости от условий работы и свойств обрабатываемого материала может принимать любые значения из диапазона 0…180°. Тем самым соблюдаются условия взаимодействия рабочих поверхностей каждого из элементов с обрабатываемым материалом на всем их протяжении, что позволяет применять ротационный рабочий орган для обработки материалов различной структуры и свойств.
Исполнение рабочих элементов, содержащих отдельные участки, позволяет обеспечить оптимальное воздействие подвижных и неподвижных элементов на обрабатываемый материал, гарантировать стабильность и безотказность технологического процесса. Последовательное сочетание прямолинейных и криволинейных, а также только прямолинейных или только криволинейных участков рабочей поверхности элемента позволяет оптимизировать траектории движения материалов различных свойств.
Возможность исполнения профиля рабочей поверхности участков как неподвижных, так и подвижных элементов криволинейным в сочетании с прямолинейностью профиля рабочей поверхности соответствующих участков противоположных элементов позволяет при определенных параметрах кривизны достичь наиболее рациональной траектории движения обрабатываемого материала и исключить его защемление на всем протяжении взаимодействующих поверхностей, приводящее к нарушению процесса обработки.
Исполнение профиля рабочих поверхностей криволинейных участков по логарифмической развертке эвольвенты, задаваемой аналитическим выражением
позволяет избежать ошибок в расчете координат и поддерживать постоянство величины угла между касательными к рабочим поверхностям элементов в точке их пересечения, тем самым обеспечивая гарантированное перемещение обрабатываемого материала без заклинивания и непрерывность технологического процесса, не известно и не следует явным образом из уровня техники, что доказывает соответствие технического решения критериям «новизна» и «изобретательский уровень».
На фиг.1 изображен рабочий орган, состоящий из подвижных элементов ПЭ и неподвижных элементов НЭ. Каждый из элементов состоит из участков, ограниченных окружностями 1…5. Профиль рабочей поверхности криволинейных участков неподвижных элементов выполнен по логарифмической развертке эвольвенты, задаваемой аналитическим выражением
В пределах каждого из участков профиль поверхностей подвижных элементов ПЭ и неподвижных элементов НЭ выполнен либо прямолинейным (например, участки подвижных элементов ПЭ, ограниченные окружностями 1 и 2, 3 и 4), либо криволинейным (например, участки подвижных элементов ПЭ, ограниченные окружностями 2 и 3, 4 и 5), причем прямолинейный участок одного элемента сочетается с криволинейным участком противоположного элемента. Последовательность сочетаний участков в пределах каждого из элементов и параметры кривизны их криволинейных поверхностей заданы исходя из условий технологического процесса и свойств обрабатываемого материала.
На фиг.2 изображен ротационный рабочий орган, состоящий из подвижных и неподвижных элементов, причем подвижные элементы состоят из нескольких последовательно расположенных участков с рабочей поверхностью прямолинейной формы, ограниченных окружностями 2, 3 и 4. Этим участкам подвижных элементов соответствуют криволинейные участки неподвижных элементов, ограниченные теми же окружностями. Профиль криволинейных участков рабочей поверхности неподвижных элементов выполнен по логарифмической развертке эвольвенты, задаваемой аналитическим выражением
На фиг.3 изображен ротационный рабочий орган, состоящий из подвижных и неподвижных элементов, причем неподвижные элементы состоят из нескольких последовательно расположенных участков с рабочей поверхностью прямолинейной формы, ограниченных окружностями 2, 3 и 4. Этим участкам неподвижных элементов соответствуют криволинейные участки подвижных элементов, ограниченные теми же окружностями. Профиль рабочей поверхности криволинейных участков подвижных элементов выполнен по логарифмической развертке эвольвенты, задаваемой аналитическим выражением
Для участка подвижного элемента, ограниченного окружностями 3 и 4 (фиг.3), криволинейная форма профиля рабочей поверхности задается радиусом-вектором R=AB, рассчитываемым по формуле
где радиус r равен радиусу производящей окружности (окружность 3 с центром, лежащим на оси вращения вала), угол φ отсчитывается от точки пересечения производящей окружности и кривой профиля рабочей поверхности, угол γ, образованный касательными к поверхностям взаимодействующих элементов в точке их пересечения, постоянен на данном участке.
Ротационный рабочий орган осуществляет технологический процесс следующим образом. При вращении относительно оси О в направлении, обозначенном стрелкой, подвижные элементы ПЭ ротационного рабочего органа захватывают порцию материала, который транспортируется по неподвижной поверхности элементов НЭ. Подвижные элементы ПЭ в процессе поворота и транспортирования материала взаимодействуют с неподвижными элементами, причем прямолинейный участок одного из элементов взаимодействует с криволинейным участком другого. Величина угла γ между касательными к рабочим поверхностям элементов в точке их пересечения постоянна на каждом участке, что обеспечивается взаимным сочетанием прямолинейных и криволинейных поверхностей, причем профиль криволинейных поверхностей выполнен по логарифмической развертке эвольвенты, задаваемой аналитическим выражением и позволяет исключить защемление обрабатываемого материала между взаимодействующими элементами при его транспортировании. При переходе обрабатываемого материала с участка на участок неподвижного элемента в зависимости от наклона участка к горизонтали изменяется направление действия силы тяжести, которая способствует защемлению материала между рабочими поверхностями элементов при его подъеме (например, участки неподвижных элементов НЭ, ограниченные окружностями 1 и 2, 2 и 3), либо высвобождению при опускании (например, участки неподвижных элементов НЭ, ограниченные окружностями 3 и 4, 4 и 5). Вследствие указанной причины величина угла γ между касательными к рабочим поверхностям элементов в точке их пересечения на каждом из этих участков будет различной, поскольку различны углы наклона к горизонтали участков неподвижных элементов НЭ, следовательно, различны и углы подъема и опускания движущегося по их поверхности обрабатываемого материала. Профиль рабочей поверхности неподвижных элементов выбирается из условия обеспечения траектории движения материала с минимальным изгибом его слоя. В результате минимизации изгибных деформаций слоя материала исключается разрыв слоя, что приводит к снижению потерь материала, способствует стабилизации нагрузки на рабочие элементы, снижению энергоемкости процесса обработки материала.
Для транспортирования сено-соломистых материалов величина угла γ на участке неподвижного элемента, по которому осуществляется скольжение материала вниз, т.е. опускание (участки, ограниченные окружностями 3 и 5), принимается меньшей или равной суммарному углу трения обрабатываемого материала о материал, из которого изготовлены неподвижные и подвижные элементы, что для кондиционной влажности соответствует примерно 70°. На участке подъема материала (участки, ограниченные окружностями 1 и 3) величина угла γ принимается большей или равной 80° для кондиционной влажности материала (фиг.1). Подвижные элементы установлены на валу, ось которого совпадает с центром концентрических окружностей 1…5. Максимальный вылет рабочей поверхности подвижного элемента за рабочую поверхность неподвижного равен половине разности диаметров окружностей 1 и 5.
Использование ротационного рабочего органа, профиль криволинейных рабочих поверхностей элементов которого выполнен по логарифмической развертке эвольвенты, задаваемой аналитическим выражением
с исполнением элементов, состоящих из нескольких участков, позволяет повысить надежность технологического процесса обработки материала, исключить защемление обрабатываемого материала между взаимодействующими элементами при его транспортировании и оптимизировать траекторию движения материала.
| название | год | авторы | номер документа |
|---|---|---|---|
| Подборщик сельскохозяйственных культур | 1990 |
|
SU1750479A1 |
| БАРАБАННЫЙ ПОДБОРЩИК | 2013 |
|
RU2535733C1 |
| ПОДБОРЩИК СТЕБЛЕЙ СЕЛЬСКОХОЗЯЙСТВЕННЫХ КУЛЬТУР | 2013 |
|
RU2535750C1 |
| Способ изготовления тонкостенных оболочек периодического профиля из алюминиевых сплавов | 2016 |
|
RU2623203C1 |
| Цепная передача | 1990 |
|
SU1728556A1 |
| Стопорный механизм | 1990 |
|
SU1803633A1 |
| МЕХАНИЗМ КРЕПЛЕНИЯ СКАТОВ БАРАБАННОГО ПОДБОРЩИКА | 2009 |
|
RU2412581C2 |
| СПОСОБ ИЗГОТОВЛЕНИЯ СТАЛЬНЫХ ПРОФИЛЬНЫХ ОБОЛОЧЕК | 2007 |
|
RU2356675C1 |
| СПОСОБ РОТАЦИОННОЙ ВЫТЯЖКИ ТОНКОСТЕННЫХ ОБОЛОЧЕК С УТОЛЩЕНИЯМИ | 2010 |
|
RU2449848C1 |
| Способ обработки зубчатых колес | 2018 |
|
RU2677473C1 |
Изобретение относится к сельскохозяйственному машиностроению и может быть использовано в машинах для уборки сельскохозяйственных культур. Ротационный рабочий орган содержит смонтированные с возможностью взаимодействия между собой рабочие элементы. Подвижные рабочие элементы установлены на валу, ось которого не пересекает поверхность неподвижных элементов. Форма рабочей поверхности элементов обеспечивает постоянство угла между касательными, проведенными к рабочим поверхностям элементов в точке их пересечения. Профиль криволинейных рабочих поверхностей одних из элементов, взаимодействующих с прямолинейными рабочими поверхностями других элементов, выполнен по кривой, определяемой уравнением:
где r - радиус окружности с центром, совпадающим с осью вращения вала; φ - текущий угол поворота радиуса r, γ - угол, образованный касательными к поверхностям взаимодействующих элементов в точке их пересечения; e - основание натурального логарифма. Использование ротационного рабочего органа позволяет исключить защемление обрабатываемого материала между взаимодействующими рабочими элементами. 1 з.п. ф-лы, 3 ил.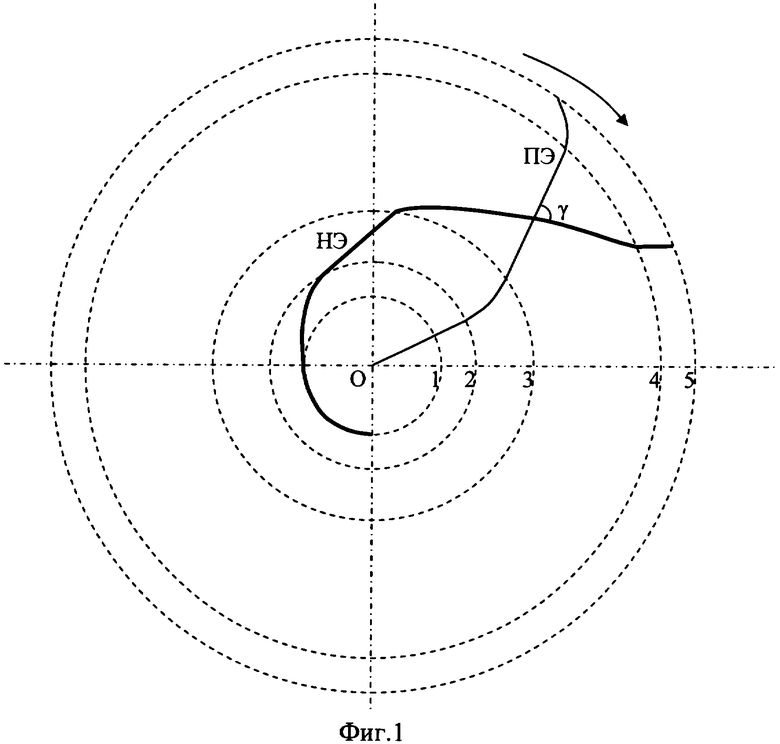
1. Ротационный рабочий орган, содержащий смонтированные с возможностью взаимодействия между собой рабочие элементы, одни из которых установлены на валу, ось которого не пересекает поверхность неподвижных элементов, обеспечивающих постоянство угла между касательными, проведенными к рабочим поверхностям криволинейных элементов в точке их пересечения с прямолинейными элементами, и прямолинейными элементами, отличающийся тем, что профиль криволинейного участка выполнен по кривой, являющейся логарифмической разверткой эвольвенты и определяемой уравнением:
где r - радиус окружности с центром, лежащим на оси вращения вала;
φ - текущий угол поворота радиуса r,
γ - угол, образованный касательными к поверхностям взаимодействующих элементов в точке их пересечения;
е - основание натурального логарифма.
2. Ротационный рабочий орган по п.1, отличающийся тем, что в зависимости от условий работы и свойств обрабатываемого материала подвижные и неподвижные рабочие элементы состоят из нескольких участков с рабочей поверхностью прямолинейной и/или криволинейной формы, располагающихся в различной последовательности и попарно сочетающихся с участками соответственно неподвижных и подвижных элементов с криволинейной и прямолинейной формой рабочей поверхности.
| RU 2056090 C1, 20.03.1996 | |||
| НАВЕСНОЙ ФРОНТАЛЬНЫЙ ПОДБОРЩИК | 0 |
|
SU179108A1 |
| Подборщик сельскохозяйственных культур | 1990 |
|
SU1750479A1 |
| SU 755241 A1, 15.08.1980 | |||
| Барабанный подборщик к уборочным сельскохозяйственным машинам | 1988 |
|
SU1523100A1 |
| US 3713283 A, 30.01.1973 | |||
| DE 19837122 A1, 24.02.2000. | |||

