Изобретение относится к машиностроению, властности к механизмам для стопорения подвижных элементов конструкций.
Цель изобретения - повышение надежности и стойкости механизма.
Указанная цель достигается тем, что стопорный механизм, содержащий основание, установленные на нем с возможностью поворота вокруг закрепленных на нем осей пневмоцилиндр и упор в виде двуплечего рычага; шарнирно связанного со штоком пневмоцилиндра, и элемент в виде выступа, закрепляемого на стопорящейся детали с возможностью взаимодействия с упором, снабжен дополнительным двуплечим рычагом, установленным на основании с возможностью поворота вокруг оси, параллельной оои поворота упора, и связывающим упор со штоком пневмоцилиндра, и роликом, расположенным на конце дополнительного рычага, связанном с упором, в упоре выполнен паз для перемещения ролика, взаимодействующие между собой поверхности упора и выступа выполнены у упора выпуклой и у выступа вогнутой, кривизна вогнутой поверхности выполнена меньше кривизны выпуклой, эти поверхности выполнены с направляющими в виде дуг окружностей и расположены с возможностью контактирования по линии, параллельной оси поворота упора, или с направляющими в виде эвольвент, при этом рабочий профиль паза выполнен из двух участков, один с постоянной кривизной, а другой - с кривизной, уменьшающейся при удалении от указанного, касательная плоскость к участку с постоянной кривизной, проходящая через линию пересечения участков, совмещена с осью пово00
о
GO
о
00
со
рота упора, а величина радиуса кривизны участка с постоянной кривизной равна суммарной величине расстояния от оси поворота рычага до оси ролика.
Признаки, отличающие изобретение от прототипа, следующие: стопорный механизм снабжен дополнительным двуплечим рычагом, установленным на основании с возможностью поворота вокруг оси, параллельной оси поворота упора, и связывающим упор со штоком пневмоцилиндра, и роликом, расположенным на конце дополнительного рычага, связанном с упором, в упоре выполнен паз для перемещения ролика, взаимодействующего между собой поверхности упора и выступа выполнены у упора выпуклой, а у выступа вогнутой, кривизна вогнутой поверхности выполнена меньше кривизны выпуклой, эти поверхности выполнены с направляющими в виде дуг окружностей и расположены с возможностью контактирования по линии,параллель- ной оси поворота упора, или с направляющими в виде эвольвент, при этом рабочий профиль паза выполнен из двух участков, один с постоянной кривизной, а другой - с кривизной, уменьшающейся при удалении от указанного, касательная плоскость к участку с постоянной кривизной, проходящая через линию пересечения участков, совмещена с осью поворота упора, а величина радиуса кривизны участка с постоянной кривизной равна суммарной величине расстояния от оси поворота рычага до оси ролика и радиуса ролика.
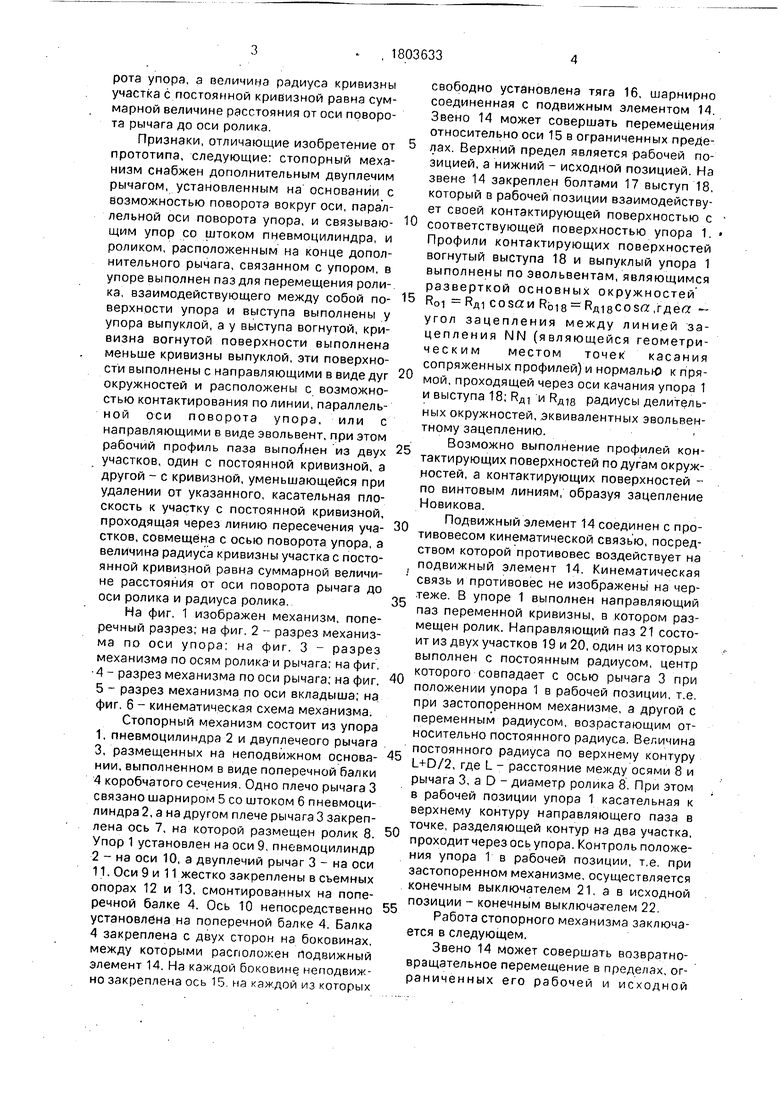
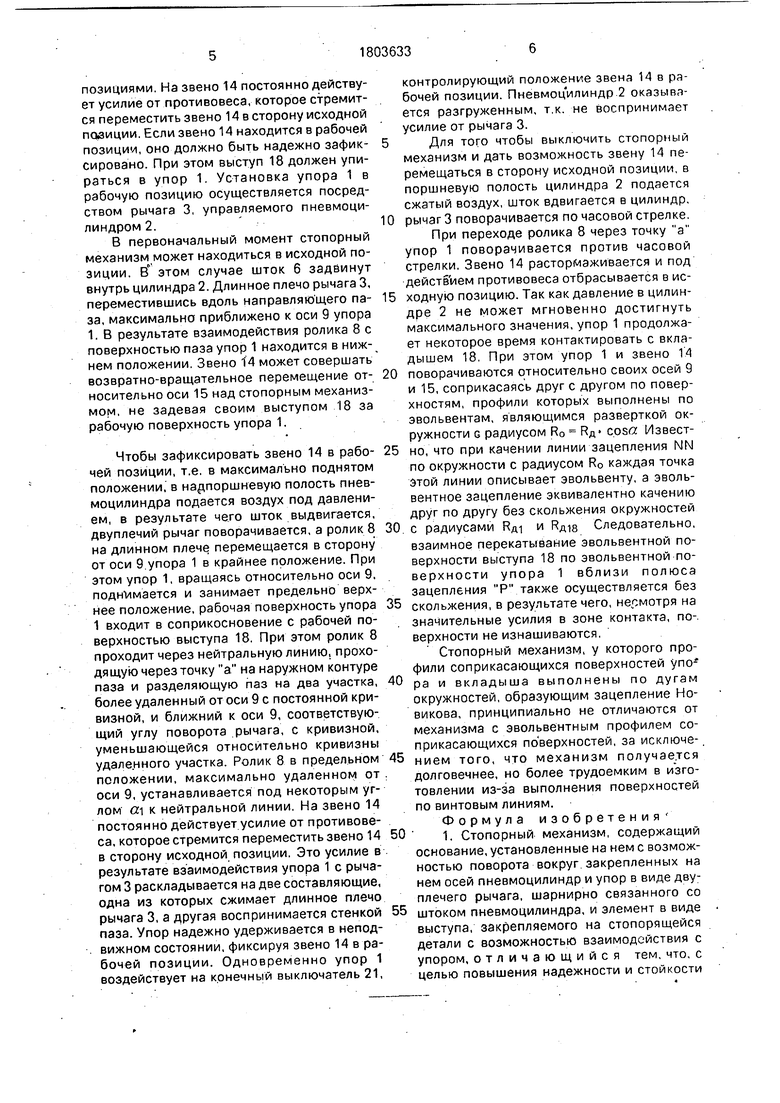
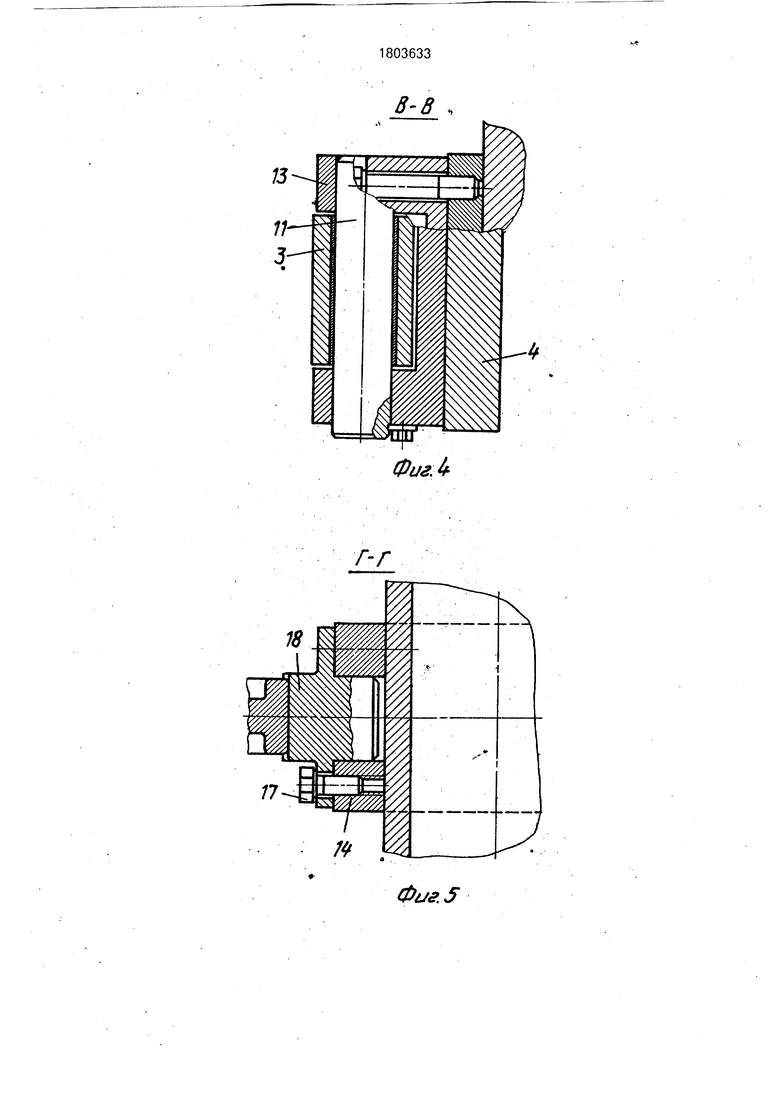
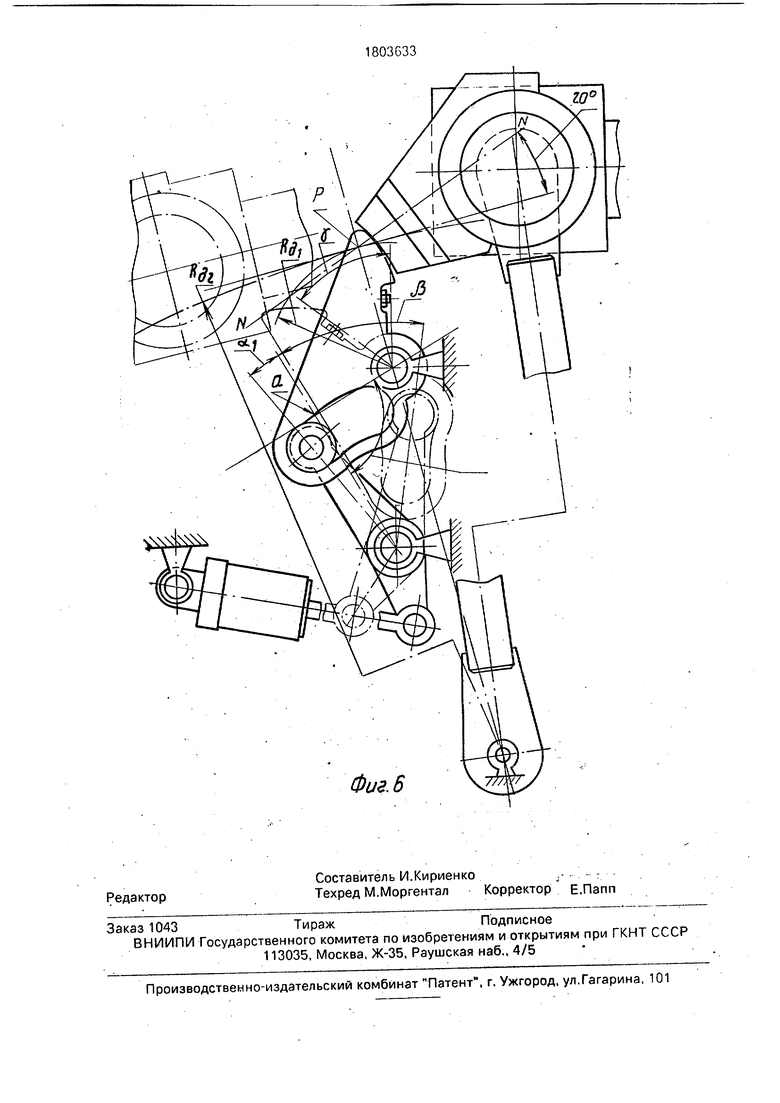
На фиг. 1 изображен механизм, поперечный разрез; на фиг. 2 - разрез механизма по оси упора; на фиг. 3 - разрез механизма по осям ролика и рычага; на фиг, 4 - разрез механизма по оси рычага; на фиг. 5 - разрез механизма по оси вкладыша; на фиг. 6 - кинематическая схема механизма.
Стопорный механизм состоит из упора
I, пневмоцилиндра 2 и двуплечеого рычага 3, размещенных на неподвижном основании, выполненном в виде поперечной балки 4 коробчатого сечения. Одно плечо рычага 3 связано шарниром 5 со штоком б пневмоцилиндра 2, а на другом плече рычага 3 закреплена ось 7, на которой размещен ролик 8. Упор 1 установлен на оси 9, пневмоцилиндр 2 - на оси 10, а двуплечий рычаг 3 - на оси
II. Оси 9 и 11 жестко закреплены в съемных опорах 12 и 13, смонтированных на поперечной балке 4. Ось 10 непосредственно установлена на поперечной балке 4. Балка 4 закреплена с двух сторон на боковинах, между которыми расположен подвижный элемент 14. На каждой боковине неподвижно закреплена ось 15. на каждой из которых
0
5
0
5
0
5
0
5
0
5
свободно установлена тяга 16, шарнирно соединенная с подвижным элементом 14. Звено 14 может совершать перемещения относительно оси 15 в ограниченных пределах. Верхний предел является рабочей позицией, а нижний - исходной позицией. На звене 14 закреплен болтами 17 выступ 18, который в рабочей позиции взаимодействует своей контактирующей поверхностью с соответствующей поверхностью упора 1. Профили контактирующих поверхностей вогнутый выступа 18 и выпуклый упора 1 выполнены по эвольвентам, являющимся разверткой основных окружностей ROI Кд1 созаи Вы8 Кд18С05«,где# - угол зацепления между линией зацепления NN (являющейся геометрическим местом точек касания сопряженных профилей) и нормалью к прямой, проходящей через оси качания упора 1 и выступа 18; Rflj и РД18 радиусы делительных окружностей, .эквивалентных эвольвен- тному зацеплению.
Возможно выполнение профилей контактирующих поверхностей по дугам окружностей, а контактирующих поверхностей - по винтовым линиям, образуя зацепление Новикова.
Подвижный элемент 14 соединен с противовесом кинематической связью, посредством которой противовес воздействует на подвижный элемент 14. Кинематическая связь и противовес не изображены на чертеже. В упоре 1 выполнен направляющий паз переменной кривизны, в котором размещен ролик. Направляющий паз 21 состоит из двух участков 19 и 20, один из которых выполнен с постоянным радиусом, центр которого совпадает с осью рычага 3 при положении упора 1 в рабочей позиции, т.е. при застопоренном механизме, а другой с переменным радиусом, возрастающим относительно постоянного радиуса. Величина постоянного радиуса по верхнему контуру L+D/2, где L - расстояние между осями 8 и рычага 3, a D - диаметр ролика 8. При этом в рабочей позиции упора 1 касательная к верхнему контуру направляющего паза в точке, разделяющей контур на два участка, проходит через ось упора. Контроль положения упора 1 в рабочей позиции, т.е. при застопоренном механизме, осуществляется конечным выключателем 21. а в исходной позиции - конечным выключателем 22.
Работа стопорного механизма заключается в следующем.
Звено 14 может совершать возвратно- вращательное перемещение в пределах, ограниченных его рабочей и исходной
позициями. На звено 14 постоянно действует усилие от противовеса, которое стремится переместить звено 14 в сторону исходной позиции. Если звено 14 находится в рабочей позиции, оно должно быть надежно зафиксировано. При этом выступ 18 должен упираться в упор 1. Установка упора 1 в рабочую позицию осуществляется посредством рычага 3, управляемого пневмоци- линдром 2.
В первоначальный момент стопорный механизм может находиться в исходной позиции. В этом случае шток 6 задвинут внутрь цилиндра 2. Длинное плечо рычага 3, переместившись вдоль направляющего паза, максимально приближено к оси 9 упора 1. В результате взаимодействия ролика 8 с поверхностью паза упор 1 находится в нижнем положении. Звено 14 может совершать возвратно-вращательное перемещение относительно оси 15 над стопорным механизмом, не задевая своим выступом 18 за рабочую поверхность упора 1.
Чтобы зафиксировать звено 14 в рабочей позиции, т.е. в максимально поднятом положении, в надпоршневую полость пнев- моцилиндра подается воздух под давлением, в результате чего шток выдвигается, двуплечий рычаг поворачивается, а ролик 8 на длинном плече перемещается в сторону от оси 9.упора 1 в крайнее положение. При этом упор 1, вращаясь относительно оси 9. поднимается и занимает предельно верхнее положение, рабочая поверхность упора 1 входит в соприкосновение с рабочей поверхностью выступа 18. При этом ролик 8 проходит через нейтральную линию, проходящую через точку а на наружном контуре паза и разделяющую паз на два участка, более удаленный от оси 9 с постоянной кривизной, и ближний к оси 9, соответствующий углу поворота рычага, с кривизной, уменьшающейся относительно кривизны удаленного участка. Ролик 8 в предельном положении, максимально удаленном от оси 9, устанавливается под некоторым углом GI к нейтральной линии. На звено 14 постоянно действует усилие от противовеса, которое стремится переместить звено 14 в сторону исходной позиции. Это усилие в результате взаимодействия упора 1 с рычагом 3 раскладывается на две составляющие, одна из которых сжимает длинное плечо рычага 3, а другая воспринимается стенкой паза. Упор надежно удерживается в неподвижном состоянии, фиксируя звено 14 в рабочей позиции. Одновременно упор 1 воздействует на конечный выключатель 21,
контролирующий положение звена 14 в рабочей позиции. Пневмоцилиндр.2 оказывается разгруженным, т.к. не воспринимает усилие от рычага 3.
Для того чтобы выключить стопорный механизм и дать возможность звену 14 перемещаться в сторону исходной позиции, в поршневую полость цилиндра 2 подается сжатый воздух, шток вдвигается в цилиндр,
рычаг 3 поворачивается по часовой стрелке.
При переходе ролика 8 через точку а
упор 1 поворачивается против часовой
стрелки, Звено 14 растормаживается и под
действием противовеса отбрасывается в исходную позицию. Так как давление в цилиндре 2 не может мгновенно достигнуть максимального значения, упор 1 продолжает некоторое время контактировать с вкладышем 18. При этом упор 1 и звено 14
поворачиваются относительно своих осей 9 и 15, соприкасаясь друг с другом по поверхностям, профили которых выполнены по эвольвентам, являющимся разверткой окружности G радиусом RO Нд cpsa Известно, что при качении линии зацепления NN по окружности с радиусом R0 каждая точка Этой линии описывает эвольвенту, а эволь- вентное зацепление эквивалентно качению друг по другу без скольжения окружностей
с радиусами Нд-| и RAig Следовательно, взаимное перекатывание эвольвентной поверхности выступа 18 по эвольвентной поверхности упора 1 вблизи полюса зацепления Р также осуществляется без
скольжения, в результате чего, несмотря на значительные усилия в зоне контакта, по-, верхности не изнашиваются.
Стопорный механизм, у которого профили соприкасающихся поверхностей упо
ра и вкладыша выполнены по дугам окружностей, образующим зацепление Новикова, принципиально не отличаются от механизма с эвольвентным профилем соприкасающихся поверхностей, за исключением того, что механизм получается
долговечнее, но более трудоемким в изготовлении из-за выполнения поверхностей по винтовым линиям.
Формула изобретения
1. Стопорный механизм, содержащий основание, установленные на нем с возможностью поворота вокруг, закрепленных на нем осей пневмоцилиндр и упор в виде дву- плечего рычага, шарнирно связанного со
штоком пневмоцилиндра, и элемент в виде выступа, закрепляемого на стопорящейся детали с возможностью взаимодействия с упором, отличающийся тем, что, с целью повышения надежности и стойкости
за счет снижения контактных напряжений, он снабжен дополнительным двуплечим рычагом, установленным на основании с возможностью поворота вокруг оси, параллельной оси поворота упора, и связывающим упор со штоком пневмоцилиндра, и роликом, расположенным на конце дополнительного рычага, связанном с упором, в упоре выполнен паз для перемещения ролика, взаимодействующие между собой поверхности упора и выступа выполнены у упора выпуклой и у выступа вогнутой, кривизна вогнутой поверхности выполнена меньше кривизны выпуклой, эти поверхности выполнены с направляющими в виде дуг окружностей и расположены с возможно0
стью контактирования по линии, параллельной оси поворота упора, или с направляющими в виде эвольвент.
2. Механизм по п.1, от л ича ющи и с я тем, что рабочий профиль паза выполнен из двух участков, один с постоянной кривизной, а другой - с кривизной, уменьшающейся при удалении от указанного, касательная плоскость к участку с постоянной кривизной, проходящая через линию пересечения участков, совмещена с осью поворота упора, а величина радиуса кривизны участка с постоянной кривизной равна суммарной величине расстояния от оси поворота рычага до оси ролика и радиуса ролика.
Фиг.4
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство реверсивного поворота и фиксации | 1991 |
|
SU1816618A1 |
| Устройство для поштучной выдачи клапанных мешков | 1987 |
|
SU1495217A1 |
| ЗУБЧАТОЕ ЗАЦЕПЛЕНИЕ ВАХРУШЕВЫХ | 2009 |
|
RU2396473C1 |
| ПРИВОД СКВАЖИННОГО НАСОСА | 2007 |
|
RU2353807C2 |
| БЕСКРИВОШИПНЫЙ ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 1996 |
|
RU2115810C1 |
| КЛАПАННОЕ УПРАВЛЯЮЩЕЕ УСТРОЙСТВО ДЛЯ КЛАПАНА ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ, СПОСОБ ОГРАНИЧЕНИЯ ОСЕВОГО ПЕРЕМЕЩЕНИЯ ПЕРЕДАТОЧНОГО ПРИСПОСОБЛЕНИЯ ДЛЯ ПЕРЕДАЧИ ДВИЖЕНИЯ КУЛАЧКА РАСПРЕДЕЛИТЕЛЬНОГО ВАЛА КЛАПАНУ, А ТАКЖЕ ДВИГАТЕЛЬ | 2012 |
|
RU2596688C2 |
| Эксцентриковый ролик кулачкового механизма для пуска и останова накопительного конвейера | 1974 |
|
SU575017A3 |
| ПЕРЕМЕННАЯ ПЕРЕДАЧА | 1994 |
|
RU2102275C1 |
| ПРИВОД СКВАЖИННОГО НАСОСА | 2006 |
|
RU2368805C2 |
| ПРИВОДНАЯ СИСТЕМА С ПОЛНЫМ КОНТАКТОМ ПОВЕРХНОСТЕЙ | 2017 |
|
RU2742434C2 |
Использование: в устройствах с подвижными элементами. Сущность изобретения: механизм содержит основание. На нем шар- нирно установлены пневмоцилиндр, упор в виде рычага и дополнительный рычаг. Последний одним концов шарнирно связан со штб ком пневмоцилиндра, а на другом конце размещен ролик. В упоре выполнен лаз и ролик расположен в нем. На Стопорящейся детали крепится элемент в виде выступа. Контактирующие поверхности упора и выступа выполнены соответственно одна - выпуклой, другая - вогнутой. Кривизна вогнутой поверхности меньше выпуклой. Направляющие этих поверхностей выполнены в виде эвольвент или дуг окружностей. Рабочая поверхность паза упора выполнена из двух участков. Один - с постоянной кривизной, другой - с уменьшающейся кривизной. При отводе упора из положения стопорения через дополнительный рычаг от пневмоцилиндра ролик сначала перемещается по участку с постоянной кривизной. Упор при этом неподвижен. Затем ролик переходит на другой участок и упор начинает поворачиваться. Расстрпорение происходит при перекатывании поверхностей упора и выступа без скольжения. 1 з.п.ф-лы; 6 ил. л
Фиг-S
| Патент США № 3979975, кл | |||
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
