Изобретение относится к способу и устройству для ограничения силовой нагрузки в комплексе средств для увеличения подъемной силы летательных аппаратов, который имеет разветвленную приводную систему для механической передачи мощности к приводным установкам систем отдельных секций посадочных закрылков и/или отклоняемых предкрылков, приводной установке датчиков относительных положений и к приводной установке приводного агрегата.
Уже известны комплексы средств для увеличения подъемной силы летательных аппаратов, которые имеют центральный силовой привод и разветвленную приводную систему для механической передачи мощности к приводным установкам систем отдельных секций посадочных закрылков и/или отклоняемых предкрылков. Если становятся заблокированными секция посадочного закрылка и/или передача для разветвленной приводной системы, эта секция и соответствующее ей ответвление приводной системы и/или передача и соответствующее ей ответвление приводной системы могут поглощать всю энергию привода от силового привода в виде реактивного момента, и соответственно этому они должны проектироваться массивными и тяжеловесными.
Механические устройства ограничителей силовой нагрузки (ограничители вращающего момента) предусматриваются в качестве защитных устройств в комплексах средств для увеличения подъемной силы летательных аппаратов с разветвленной приводной системой, такой как указанные, с целью предотвращения местной силовой перегрузки в этой секции, в соответствующем ответвлении приводной системы и/или передаче и в соответствующем ответвлении приводной системы в случае блокирования отдельной секции посадочного закрылка и/или передачи разветвленной приводной системы. В этом случае секция посадочного закрылка защищается с помощью ограничителя силовой нагрузки установки (срабатывающего ограничителя вращающего момента), и разветвленная приводная система защищается посредством использования ограничителя силовой нагрузки системы (ограничителя вращающего момента в системе).
Устройства ограничителей силовых нагрузок, такие как эти, собраны на базе механических деталей, сами по себе представляют собой значительно оптимизированные технические решения. Однако из-за их сложной конструкции эти системы увеличивают массу и эксплуатационные издержки у летательного аппарата, и более того, по причине их функционального назначения они начинают работать только в случае наличия неисправностей. Наконец, при узких по своему диапазону изменения допусках на проектирование и при наличии динамики, чувствительной к изменению параметров системы, эти устройства ограничителей силовых нагрузок могут среагировать в том случае, когда приводная система находится в исправности и работает без повреждений или погрешностей, после чего вся система будет заблокирована.
Задачами настоящего изобретения являются разработка способа такого типа, о котором упоминалось здесь первоначально, и разработка устройства для реализации такого способа, как вышеуказанный, при котором достигается ограничение силовой нагрузки при наличии желательного сокращения массы и эксплуатационных издержек системы.
Эти задачи изобретения достигаются посредством реализации способа и устройства, которые заявлены в независимых пунктах формулы изобретения. В соответствии с осуществлением способа согласно настоящему изобретению переменные параметры характеристик положений обнаруживаются деталями приводной системы и передаются на измерительное устройство для ограничения силовой нагрузки. Это измерительное устройство оценивает переменные параметры характеристик положений с помощью алгоритма, предназначенного для идентификации неисправностей, и инициирует контролируемое ограничение работы приводного агрегата в случае наличия неисправности. Этот способ, осуществляемый согласно изобретению, означает, что имеется возможность ограничения перегрузок, возникающих из-за наличия неисправности и приводящих в результате к помехам в комплексе средств для увеличения подъемной силы, без необходимости снабжения механическим устройством ограничителя силовой нагрузки.
Изобретение будет более подробно поясняться последующим текстом со ссылками на один вариант его примерного воплощения, который иллюстрируется чертежами, при этом на последних:
фиг.1 показывает схематически устройство приводной системы закрылков, выполненное в соответствии с настоящим изобретением со связанными с ним приводными деталями и с электронным способом контролируемой защитой от силовых перегрузок, основанной на сравнении сигналов;
фиг.2 схематически показывает устройство приводной системы закрылков, выполненное в соответствии с настоящим изобретением при его дополнительном варианте воплощения;
фиг.3 показывает блок-схему реализации одного варианта воплощения способа для ограничения силовых нагрузок, выполненную в соответствии с изобретением;
фиг.4 иллюстрирует схему так называемого обобщенного средства обозрения для идентификации неисправностей в кинематической цепи.
Приводная система для посадочных закрылков, как это иллюстрировано на фиг.1, скорее оснащена электронным методом контролируемого средства защиты от силовых перегрузок, чем обычным механическим ограничителем силовых нагрузок. В этом случае приводная система содержит порт и подсистемы 1, 2 левого и правого бортов летательного аппарата, которые соответственно используются для привода двух закрылков 3, 4 и 5, 6 с целью увеличения подъемной силы, которые расположены на хвостовых кромках крыла, при этом две подсистемы 1, 2 спроектированы симметричными по отношению друг к другу. Механическая энергия, которая требуется для приведения в позиционирующее положение закрылков 3-6, вырабатывается центральным приводным агрегатом 7, мощность которого может контролироваться в значительной степени динамическим способом, и в каждом случае механическая энергия передается через кинематическую цепь 8, 9 соответственно к набору исполнительных механизмов 10 у двух крыльев. Эти механизмы в каждом случае включают в себя передачи 11, 12 ответвлений. Отдельные приводные установки 25 соединены с кинематической цепью 8 посредством соответственно подключенных передач 11 ответвлений. Тормозы 13, 14 с гидравлическим приводом также расположены на наружном концевом участке кинематических цепей 8, 9. Более того, асимметрично расположенные передатчики 15, 16 расположены у двух крайних концевых участков соответствующих кинематических цепей 8, 9, иначе говоря, в наличии имеется передатчик угловых положений, с помощью которого может определяться текущее мгновенное угловое положение вала на концевом участке каждой кинематической цепи 8, 9, и, если это целесообразно, любое несимметричное положение закрылков может идентифицироваться по несимметричному угловому положению. Компоновка завершается передатчиком 17 угловых положений, расположенным у приводного агрегата 7 с тремя вышеупомянутыми компонентами, каждый из которых подключен через соответственно подключенный блок 18-20 передатчика и через соответствующие линии 21, 22 передачи сигналов к специальному блоку 23 контролирования, который оснащен монитором для того, чтобы идентифицировать помеху.
В связи с проектированием приводной системы и закрылков симметричными, положения двух подсистем будут только незначительно отличаться друг от друга во время обычного полета, поскольку две подсистемы для передачи мощности к закрылкам у крыльев левого и правого бортов летательного аппарата имеют предполагаемое идентичное динамическое реагирование. Одно возможное малое отличие вызывается, по существу, несимметричным распределением воздушной силовой нагрузки на два крыла, которое может учитываться аналитическим способом посредством использования адаптивных пороговых величин по ходу процесса идентификации неисправностей в том случае, когда являются известными отклонения интерцепторов и отклонения воздушных скоростей. В случае помехи, в противоположность этому, механические характеристики одной из подсистем будут значительно изменяться и, таким образом, они также будут менять ее динамическое реагирование. Если стимул со стороны приводного агрегата 7 является идентичным, это приведет к различными положениям в этих подсистемах. В этом случае зондирующая подсистема действует так же, как и опорная система для подсистемы неисправностей. Сигнал сравнения между положениями у соответствующих концевых участков двух кинематических цепей и/или между другими симметричными положениями подсистем 1, 2 левого и правого бортов летательного аппарата, следовательно, приводит в случае наличия помехи к разностям, которые не могут возникать при исследуемом правильном нормальном случае и которые используются в соответствии с изобретением для обнаружения наличия помехи.
Для того чтобы устранять отказ материальной части, приводной агрегат 7 теперь ограничивается в том случае, если превышены предопределенные пороговые величины для разностей в положениях в результате наличия помехи. Кроме того, уменьшенная силовая нагрузка у выходных приводов достигается в случае наличия помехи с помощью использования заданной гибкости элементов, секции 27 вала, между приводным агрегатом 7 и первой передачей 26 ответвления без уменьшения доминирования помехи при воздействии на положения подсистемы. Оценка сигналов, требуемых для идентификации неисправности в случае наличия помехи, такой как эта, и инициализация управляемого ограничения центрального приводного агрегата 7 осуществляются в этом случае и выполняются в измерительном устройстве 23, которое само является составной частью компьютера 24 для срабатывания и контролирования, предназначенного для системы закрылков, увеличивающей подъемную силу.
На фиг.1, таким образом, показано устройство для ограничения силовой нагрузки в комплексе средств для увеличения подъемной силы летательных аппаратов, при этом комплекс средств для увеличения подъемной силы летательного аппарата имеет разветвленную приводную систему для передачи механической энергии приводным агрегатам 25 отдельных секций 3, 4, 5, 6 и/или систем отклоняемых предкрылков, датчики 8, 9, 17 положений и приводной агрегат 7 с устройством для ограничения силовой нагрузки, имеющим измерительное устройство 23, которое подключено к датчикам 8, 9, 17 положений и спроектировано для того, чтобы обрабатывать сигналы, поступающие от датчиков 8, 9, 17 положений и чтобы вырабатывать сигнал, предназначенный для ограничения подаваемой энергии для работы привода.
Датчики положений имеют передатчик 17 угловых положений на приводном агрегате и/или передатчики 15, 16 угловых положений, которые работают как передатчики асимметрии на концевых участках кинематический цепей 8, 9.
Приводная система закрылков, которая иллюстрирована чертежом, изображенным на фиг.2, при реализации этого способа относится к электронным методом контролируемому техническому средству защиты от силовых перегрузок, работающему с помощью диагностики, основанной на сигналах. Приводная система спроектирована таким образом, что она в большой степени является идентичной той системе, которая показана на чертеже, изображенном на фиг.1, и используется для осуществления привода двух закрылков 103, 104 и 105, 106 для повышения подъемной силы, соответственно установленных на хвостовых кромках крыла посредством использования центрального приводного агрегата 107, посредством применения двух кинематических цепей 108, 109, передач 111, 112 ответвлений, а также посредством исполнительных механизмов 110. В этом случае тормозы 113, 114 с гидравлическим приводом и передатчики 115, 116 асимметрии также расположены на крайнем концевом участке кинематических цепей 108, 109. Более того, передатчик 117 угловых положений предусмотрен на приводном агрегате 107. В дополнение к блокам 118-120 передатчиков и соответствующим линиям для передачи сигналов имеются дополнительные передатчики 125, 126 сигналов (которые аналогично подключены к измерительному устройству 123), однако, в этом случае они предусмотрены в кинематических цепях 108, 109 и в каждом случае в непосредственной близости от передач 111, 112 ответвлений.
При одном конкретном предпочтительном варианте воплощения настоящего изобретения используются сигналы от датчиков 17, 15, 16, показанных на чертеже, изображенном на фиг.1, и два дополнительных сигнала от датчиков положений, находящихся в непосредственной близости от соответствующих первых передач ответвлений кинематической цепи левого и правого бортов для того, чтобы ограничивать силовую нагрузку в кинематической цепи. Этот вариант воплощения настоящего изобретения позволяет заменить ограничитель силовой нагрузки системы.
На фиг.3 показана используемая блок-схема 130 для описания способа, реализуемого в соответствии с настоящим изобретением, предназначенная для ограничения силовых нагрузок в комплексе средств для увеличения подъемной силы летательного аппарата, при этом такой комплекс имеет разветвленную приводную систему для механической передачи мощности с целью осуществления работы приводных установок отдельных секций систем посадочных закрылков и/или систем отклоняемых предкрылков, датчики положений и приводной агрегат.
На стадии 231 способа измеряются сигналы, по меньшей мере, от двух датчиков положений. Эти сигналы представляют собой угловые положения на местах датчиков положений в кинематической цепи. Множество датчиков положений может быть использовано вдоль кинематической цепи. Эти сигналы подаются к измерительному устройству 23, как это показано на чертеже, изображенном на фиг.1, или к измерительному устройству 123, как это показано на чертеже, изображенном на фиг.2, в котором также выполняются следующие рабочие операции способа.
По меньшей мере, одна опорная переменная величина рассчитывается по измеренным сигналам от датчиков положений на стадии 232 способа. Опорная переменная величина является индикаторным средством для идентификации помехи и, таким образом, силовой перегрузки. Определение опорной переменной величины описывается в далее излагаемом здесь тексте.
Каждая опорная переменная величина сравнивается с соответствующей пороговой величиной, которая определяется предварительно по максимально допускаемой силовой нагрузке при выполнении следующей стадии 233 способа. Различные опорные переменные величины могут определяться в соответствии с идентичными или различными пороговыми величинами.
Учитывая тот факт, что ни одна опорная переменная величина либо не достигает, либо не превышает соответствующую пороговую величину, имеет место ответвление и такое, как показано стрелкой 235 в сторону стадии 231 способа, и выполняются дополнительные измерения сигналов от датчиков положений.
Если, по меньшей мере, одна опорная переменная величина достигает или превышает значение соответствующей пороговой величины, имеет место ответвление и такое, как показано стрелкой 234 в сторону выполнения стадии 236 способа для выработки контрольного сигнала, предназначенного для ограничения приводной мощности в измерительном устройстве 23, показанном на фиг.1, или в измерительном устройстве 123, изображенном на фиг.2.
Энергия привода приводного агрегата ограничивается посредством использования контрольного сигнала при выполнении стадии 237 способа. В этом случае контрольный сигнал, который вырабатывается измерительным устройством, пропускается к компьютеру 24 для контролирования, показанному на чертеже, изображенном на фиг.1, или к компьютеру 124 для контролирования, показанному на чертеже, изображенном на фиг.2, который инициирует управляемое ограничение подачи энергии системы с помощью приводного агрегата. Приводная система преимущественно имеет весьма динамичный по своей сущности приводной агрегат для быстрого контролирования приводной мощности.
Измеренные сигналы от двух датчиков положений могут использоваться совместно при известности сведений о гибкости (возвратности жесткости) кинематической цепи между положениями датчиков положений с целью осуществления расчета силовой нагрузки в этой секции. Распределение силовой нагрузки по всей кинематической цепи может вычисляться в соответствии с количеством положений датчиков положений в кинематической цепи. Различные опорные переменные величины и соответствующая пороговая величина могут определяться на основе этих взаимозависимостей и максимальной силовой нагрузки на всю систему при правильном положении, которая заранее задается проектом или может быть предварительно определена.
В связи с тем, что разность в силовой нагрузке в кинематической цепи вверху по потоку и внизу по потоку от передачи ответвления представляет собой силовую нагрузку на кинематическую цепь, подлежащую ограничению, одна из опорных переменных величин при одном предпочтительном варианте воплощения настоящего изобретения включает в себя, по меньшей мере, одну разность между измеренными сигналами, поступившими, по меньшей мере, от двух датчиков положений.
При дополнительном предпочтительном варианте воплощения настоящего изобретения, два сигнала измеряются при известном интервале времени, по меньшей мере, одним датчиком положений для того, чтобы определить угловую скорость, возникающую при этом. Разность в угловых скоростях между по-разному расположенными датчиками положений является индикатором резкого замедления угловой скорости в одной точке в кинематической цепи. Вследствие этого соответствующая опорная переменная величина, которая является функцией разности между угловыми скоростями, в совокупности с приемлемой пороговой величиной, идентифицирует устойчивую помеху, которая может несомненно приводить к появлению силовой перегрузки. Различные опорные переменные величины и соответствующая пороговая величина могут определяться на основе этих взаимозависимостей, а также может определяться максимальная разность скоростей вращения при исследуемом положении, когда она задана проектом или может определяться им.
Предпочтительно одна из опорных переменных величин включает в себя функцию ускорения. Соображения, которые требуются для определения опорной переменной величины и для определения связанной с ней пороговой величины, получаются таким способом, который для специалиста в данной области является подобным тому, который применяется в случае наличия угловой скорости.
При дополнительном предпочтительном варианте воплощения настоящего изобретения в качестве одной опорной переменной величины используется расчетная силовая нагрузка по соображениям, подобным вышеуказанным.
При дополнительном предпочтительном варианте воплощения настоящего изобретения мощность привода приводного агрегата определяется для того, чтобы более точно дедуктивно определять распределение силовых нагрузок в кинематической цепи.
При другом предпочтительном варианте воплощения настоящего изобретения пороговая величина задается подходящим образом для рабочего положения. Это позволяет принимать во внимание наименее вероятную силовую нагрузку при каждом рабочем положении системы.
При другом предпочтительном варианте воплощения настоящего изобретения одна из опорных переменных величин включает в себя функцию переменной величины положения, которая оценивается посредством применения математических методов с учетом группы параметров, содержащей положение, скорость и силовую нагрузку. Система, основанная на математической модели, таким образом, позволяет быстрее осуществлять при одном и том же времени идентифицирование помехи и при наличии уменьшенного количества датчиков.
На фиг.4 иллюстрировано осуществление одной такой системы, основанной на математической модели, в частности, той системы, которая иллюстрирует как положения датчиков, так и структурную конфигурацию наблюдателя. В дополнение к входному сигналу в виде

разность между измеренной выходной переменной

и моделированной выходной переменной величиной является обратной связью в виде дополнительной входной переменной величины для наблюдателя.
Исследователи, осуществлявшие оценку положения при использовании различных конфигураций датчиков, показали, что этот выбор компоновки датчиков может считаться минимальным в отношении датчиков. Система датчиков, которая уже осуществлена в настоящий момент времени в комплексах средств для увеличения подъемной силы летательных аппаратов на концевом участке передачи между валами и у приводного агрегата, должна иметь только один добавленный к ним датчик, размещенный в центре между этими положениями для того, чтобы гарантировать требуемое качество наблюдателя.
Отклонение наблюдателя для идентификации неисправностей в гидравлических усилителях различается с помощью всех доступных входов и выходов системы, в каждом случае используемых для работы наблюдателя, но при одном отдельном определенном входе или выходе, который не учитывается. Опорная переменная величина в виде

различается, главным образом, отсутствием обратной связи сигнала φS1 положения для наблюдателя. Из-за того, что эта величина корректно отражается на карте наблюдателем при исследуемом правильном положении, но не в случае наличия помехи, в результате помеха приводит к значительной разности между реальным положением и оцениваемым положением. Наблюдатель, как показано на фиг.4, не может впоследствии корректировать погрешность оценки результирующего положения в случае наличия помехи. Пороговая величина в этом случае выбирается таким образом, чтобы опорная переменная величина была меньше, чем значение пороговой величины при исследуемом правильном положении.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА ПОДДЕРЖКИ ЭКИПАЖА | 2015 |
|
RU2598130C1 |
| ИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА ПОДДЕРЖКИ ЭКИПАЖА | 2013 |
|
RU2541902C2 |
| СИСТЕМА И СПОСОБ УПРАВЛЕНИЯ ПЕРЕМЕЩЕНИЕМ ЗАКРЫЛКОВ ЛЕТАТЕЛЬНОГО АППАРАТА | 2017 |
|
RU2728236C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПЕРЕСТАНОВКОЙ ПОДВИЖНОГО СТАБИЛИЗАТОРА НА ЛЕТАТЕЛЬНОМ АППАРАТЕ | 2008 |
|
RU2460670C2 |
| Интеллектуальная система поддержки экипажа летательного аппарата | 2024 |
|
RU2839176C1 |
| ЛЕГКИЙ СВЕРХЗВУКОВОЙ МНОГОЦЕЛЕВОЙ САМОЛЕТ | 2004 |
|
RU2271305C1 |
| СИСТЕМА УПРАВЛЕНИЯ САМОЛЕТОМ | 2003 |
|
RU2235043C1 |
| ПРИВОД С ОБЛЕГЧЕННОЙ УСТАНОВКОЙ | 2017 |
|
RU2704077C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ МОЩНОСТИ ТЯГОВОГО ЭЛЕКТРОДВИГАТЕЛЯ НЕЗАВИСИМОГО ВОЗБУЖДЕНИЯ КОЛЕСНОГО ТРАНСПОРТНОГО СРЕДСТВА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2015040C1 |
| СПОСОБ И УСТРОЙСТВО ОБЕСПЕЧЕНИЯ АВТОМАТИЧЕСКОГО СНИЖЕНИЯ НАГРУЗКИ НА СИСТЕМУ ПОВЕРХНОСТЕЙ, СОЗДАЮЩИХ БОЛЬШУЮ ПОДЪЕМНУЮ СИЛУ, В ЧАСТНОСТИ НА СИСТЕМУ ПОСАДОЧНЫХ ЗАКРЫЛКОВ ЛЕТАТЕЛЬНОГО АППАРАТА | 2006 |
|
RU2415776C2 |
Группа изобретений относится к авиации. Заявлены способ и устройство для ограничения силовой нагрузки в системе для увеличения подъемной силы летательных аппаратов. Предполагается, что указанная система имеет разветвленную приводную систему для механической передачи мощности к приводным агрегатам отдельных секций систем посадочных закрылков и/или систем отклоняемых предкрылков посредством соответствующих кинематических цепей и приводной агрегат. Сигналы измеряются, по меньшей мере, с помощью двух датчиков положений. Способ осуществляется посредством сравнения каждой опорной переменной величины с соответствующей пороговой величиной, которую предварительно определяют по максимально допустимой силовой нагрузке. Сигнал управления вырабатывают для того, чтобы ограничивать подачу мощности к приводному агрегату, когда, по меньшей мере, одна из опорных переменных величин достигает или превышает значение пороговой величины. Группа изобретений обеспечивает ограничение силовой нагрузки при сокращении массы и эксплуатационных издержек ограничивающей системы. 2 н. и 19 з.п. ф-лы, 4 ил.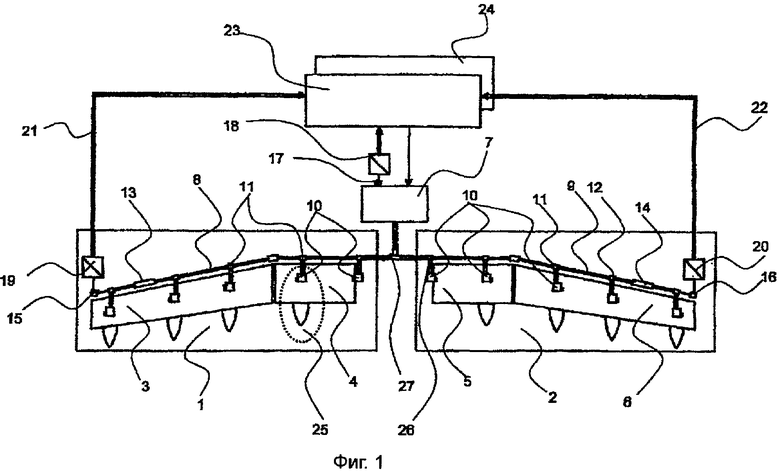
1. Способ ограничения силовой нагрузки в системе для увеличения подъемной силы летательных аппаратов, имеющей разветвленную приводную систему для механической передачи мощности к приводным агрегатам (25) отдельных секций (3, 4, 5, 6; 103, 104, 105, 106) систем посадочных закрылков и/или систем отклоняемых предкрылков посредством соответствующих кинематических цепей (8, 9; 108, 109), датчики (15, 16, 17; 115, 116, 117) положений и приводной агрегат (7; 107), при котором сигналы измеряются (231), по меньшей мере, с помощью двух датчиков положений, отличающийся тем, что он предусматривает
расчет (232), по меньшей мере, одной опорной переменной величины по измеренным сигналам,
сравнение (233) каждой опорной переменной величины с соответствующей пороговой величиной, которую предварительно определяют по максимально допустимой силовой нагрузке, и
выработку (236) сигнала управления для того, чтобы управляемым способом ограничивать подачу мощности к приводному агрегату (7; 107) в пределах ограничения его приводной мощности, когда, по меньшей мере, одна из опорных переменных величин достигает или превышает значение пороговой величины.
2. Способ ограничения силовой нагрузки по п.1, отличающийся тем, что одна из опорных переменных величин включает в себя, по меньшей мере, одну разность между измеренными сигналами, поступившими, по меньшей мере, от двух датчиков положений.
3. Способ ограничения силовой нагрузки по п.1, отличающийся тем, что измеряют два сигнала при известном интервале времени у, по меньшей мере, одного датчика положений.
4. Способ ограничения силовой нагрузки по п.3, отличающийся тем, что одна из опорных переменных величин включает в себя функцию угловой скорости.
5. Способ ограничения силовой нагрузки по п.3, отличающийся тем, что одна из опорных переменных величин включает в себя функцию ускорения.
6. Способ ограничения силовой нагрузки по любому из пп.1-5, отличающийся тем, что одна из опорных переменных величин использует вычисленную силовую нагрузку.
7. Способ ограничения силовой нагрузки по любому из пп.1-5, отличающийся тем, что определяют приводную мощность приводного агрегата.
8. Способ ограничения силовой нагрузки по любому из пп.1-5, отличающийся тем, что обнаруживают сигналы от датчиков (15, 16; 115, 116) положений, которые расположены у каждого из концевых участков кинематических цепей (8, 9; 108, 109), и от передатчика (17; 117) угловых положений, который расположен на приводном агрегате (7; 107), и по сигналам рассчитывают, по меньшей мере, одну опорную переменную величину, которая представляет собой силовую нагрузку в кинематических цепях (8, 9; 108, 109).
9. Способ ограничения силовой нагрузки по п.8, отличающийся тем, что сигнал сравнения получают между соответствующими подсистемами, которые связаны с крыльями левого и правого бортов летательного аппарата и каждая из которых содержит кинематическую цепь (8, 9; 108, 109), передатчик (15, 16; 115, 116) положений, который расположен у концевого участка кинематической цепи (8, 9; 108, 109), и передатчик (17; 117) угловых положений, который размещен на приводном агрегате (7, 107).
10. Способ ограничения силовой нагрузки по п.8, отличающийся тем, что сигналы от датчиков (125, 126) положений, которые предусмотрены на передачах (111, 112) ответвлений кинематических цепей (108, 109), дополнительно используют для того, чтобы вычислять, по меньшей мере, одну опорную переменную величину, которая представляет собой силовую нагрузку в кинематической цепи (8, 9; 108, 109).
11. Способ ограничения силовой нагрузки по п.7, отличающийся тем, что ограничивают (237) динамичным способом приводную мощность приводного агрегата, используя сигнал управления.
12. Способ ограничения силовой нагрузки по любому из пп.1-5, отличающийся тем, что пороговую величину предварительно определяют приемлемым образом для рабочего положения.
13. Способ ограничения силовой нагрузки по п.1, отличающийся тем, что одна из опорных переменных величин включает в себя функцию переменной величины положения, которую оценивают посредством математических методов при учете группы параметров, содержащей положение, скорость и силовую нагрузку.
14. Устройство ограничения силовой нагрузки в системе для увеличения подъемной силы летательных аппаратов, имеющей разветвленную приводную систему для механической передачи мощности к приводным агрегатам (25) отдельных секций (3, 4, 5, 6; 103, 104, 105, 106) систем посадочных закрылков и/или систем отклоняемых предкрылков посредством соответствующих кинематических цепей (8, 9; 108, 109), датчики (15, 16, 17; 115, 116, 117) положений и приводной агрегат (7; 107), отличающееся тем, что оно имеет измерительное устройство (23; 123) для ограничения силовой нагрузки, которое подключено к датчикам (15, 16, 17; 115, 116, 117) положений и которое выполнено так, чтобы обрабатывать сигналы, поступающие от датчиков (15, 16, 17; 115, 116, 117) положений, и чтобы посредством сравнения, по меньшей мере, одной опорной переменной величины, которая представляет собой силовую нагрузку в кинематических цепях (8, 9; 108, 109), с соответствующей пороговой величиной, которую предварительно определяют по максимально допустимой силовой нагрузке, вырабатывать сигнал управления для того, чтобы ограничивать приводную мощность, которой снабжают приводной агрегат (7; 107), в пределах ограничения этой приводной мощности.
15. Устройство по п.14, отличающееся тем, что датчики положений имеют передатчик (17; 117) угловых положений на приводном агрегате (7; 107) и/или передатчики (15, 16; 115, 116) угловых положений, которые действуют как асимметричные передатчики на концевых участках кинематических цепей (8, 9; 108, 109).
16. Устройство по п.14, отличающееся тем, что датчики положений имеют передатчики (125, 126) угловых положений на передачах (111, 112) ответвлений кинематических цепей (108, 109).
17. Устройство по любому из пп.14-16, отличающееся тем, что предусмотрены датчики (15, 16; 115, 116) положений, которые расположены у каждого из концевых участков кинематических цепей (8, 9; 108, 109), и передатчик (17; 117) угловых положений, который расположен на приводном агрегате (7; 107), и тем, что измерительное устройство (23; 123) предусмотрено для того, чтобы вычислять по его сигналам, по меньшей мере, одну опорную переменную величину, которая представляет собой силовую нагрузку в кинематической цепи (8, 9; 108, 109).
18. Устройство по п.17, отличающееся тем, что измерительное устройство (23; 123) предусмотрено для выполнения сравнения сигналов между соответствующими подсистемами, которые связаны с крыльями левого и правого бортов летательного аппарата и каждая из которых содержит кинематическую цепь (8, 9; 108, 109), передатчик (15, 16; 115, 116) положений, который расположен на концевом участке кинематической цепи (8, 9; 108, 109), и передатчик (17; 117) угловых положений, который расположен на приводном агрегате (7; 107).
19. Устройство по п.17, отличающееся тем, что датчики (125, 126) положений дополнительно предусмотрены на передачах (111, 112) ответвлений кинематических цепей (108, 109) и их сигналы используются для того, чтобы рассчитывать, по меньшей мере, одну опорную переменную величину, которая представляет собой силовую нагрузку в кинематической цепи (8, 9; 108, 109).
20. Устройство по п.14, отличающееся тем, что мощность приводного агрегата может контролироваться динамичным способом.
21. Устройство по п.14, отличающееся тем, что секция (27) вала с определенной высокой гибкостью располагают между приводным агрегатом (7) и первой передачей (26) ответвления.
| Фотоэлектрическое устройство для измерения плотности текстильных материалов | 1980 |
|
SU922633A1 |
| US 4260121 А, 07.04.1981 | |||
| US 3841589 А, 15.10.1974 | |||
| RU 1820595 С, 20.01.1996. | |||

