Данное изобретение относится к измерительному датчику вибрационного типа для измерения текучей среды, в особенности газа, жидкости, порошка и других текучих веществ, транспортируемых по трубопроводу.
В технологии измерения и автоматизации процессов физические параметры, такие как скорость массопереноса, плотность и (или) вязкость среды, текущей в трубопроводе, часто измеряются с использованием измерительных устройств, расположенных вдоль линии наблюдения, которые включают в себя датчик вибрационных измерений, через который течет среда, и соединенную с ним измерительную и управляющую схему, для обеспечения противодействующих сил в среде, таких как, например, силы Кориолиса, соответствующие скорости массопереноса, силы инерции, соответствующие плотности среды, и (или) силы трения, соответствующие вязкости среды, и т.д., и для получения сигналов измерения, выведенных из этих сил, представляющих соответственно скорость массопереноса, плотность и вязкость.
Такие измерительные датчики, особенно в виде измерителей кориолисового массопереноса или измерителей кориолисового массопереноса/плотности детально описаны, например, в WO-A 04/038341, WO-A 03/076879, WO-A 03/027616, WO-A 03/021202, WO-A 01/33174, WO-A 00/57141, WO-A 98/07009, в патентах США 6711958, 6666098, 6308580, 6092429, 5796011, 5301557, 4876898, в заявках ЕПВ ЕР-А 553939, ЕР-А 1001254, ЕР-А 1448956, или ЕР-А 1421349. Для перемещения среды, текущей по меньшей мере иногда, измерительные датчики включают в себя по меньшей мере одну трубку датчика, которая крепится соответствующим образом с возможностью колебаний к обычно более толстостенному, предпочтительно трубчатому и (или) балкообразному несущему цилиндру или несущей рамке. Для создания вышеупомянутых противодействующих сил трубку датчика заставляют колебаться во время работы обычно посредством электродинамического возбуждающего механизма. Для улавливания вибраций трубки датчика, особенно концевых вибраций на входном и выходном концах, и для выработки по меньшей мере одного сигнала измерения колебаний, представляющего такие вибрации, эти измерительные датчики дополнительно включают в себя сенсорное средство, реагирующее на движения, а значит и на механические колебания трубки датчика.
Во время работы вышеописанная внутренняя колебательная система измерительного датчика, образованная по меньшей мере одной трубкой датчика, средой, транспортируемой в ней по меньшей мере в один момент времени, и по меньшей мере частично возбуждающим механизмом и сенсорным средством, возбуждается посредством электромеханического возбуждающего механизма по меньшей мере время от времени, чтобы осуществить механические колебания в желательным колебательном режиме на по меньшей мере одной преобладающей желательной частоте колебаний. Эти колебания в так называемом желательном колебательном режиме являются, в основном, особенно в случае применения измерительного датчика в измерителе кориолисового массопереноса или плотности, по меньшей мере частично поперечными колебаниями. В этом случае в качестве желательной частоты колебаний выбирается естественная мгновенная резонансная частота внутренней колебательной системы, которая, в свою очередь, зависит от размера, формы и материала трубки датчика, а также от мгновенной плотности среды; если это приемлемо, на желательную частоту колебаний может также значительно влиять мгновенная вязкость среды. Вследствие отклонения плотности подлежащей измерению среды и (или) вследствие изменения среды во время работы, желательная частота колебаний естественным образом изменяется во время работы измерительного датчика по меньшей мере в пределах калиброванного и, в определенной степени, заранее заданного диапазона желательной частоты, который соответственно имеет заранее заданные нижний и верхний частотные пределы.
Внутренняя колебательная система измерительного датчика, сформированная совместно по меньшей мере одной трубкой датчика, колебательным механизмом и сенсорным средством, кроме того, обычно помещается в корпусе датчика, имеющем в качестве неотъемлемого компонента несущую рамку или несущий цилиндр, в зависимости от обстоятельств. Этот корпус может тоже иметь большое количество естественных колебательных режимов. Подходящие корпуса датчиков для измерительных датчиков вибрационного типа описаны, например, в WO-A 03/076879, WO-A 03/021202, WO-A 01/65213, WO-A 00/57141, US-B 6776052. US-B 6711958, US-A 6044715, US-A 5301557 или ЕР-А 1001254. Корпусные крышки таких корпусов датчиков обычно изготавливаются в виде одной детали посредством глубоко вытянутых промежуточных частей. Дополнительно, однако, эти корпусные крышки могут быть - особенно в случае больших размеров - составлены из отдельных промежуточных частей в форме раковин, как предложено, например, в WO-A 03/021202. Корпус датчика, описанный в WO-A 03/021202, формируется посредством опорной трубки и приваренной к ней корпусной крышки, причем сама корпусная крышка включает в себя, благодаря специальной технологии изготовления, верхний практически корытообразный первый корпусной сегмент с первым краем сегмента и вторым краем сегмента, сформированным практически идентично первому краю сегмента, практически плоский второй корпусной сегмент, который соединен через свой первый край сегмента с первым краем сегмента первого корпусного сегмента, и третий корпусной сегмент, практически зеркально симметричный второму корпусному сегменту и соединенный через свой первый край сегмента со вторым краем сегмента первого корпусного сегмента.
Корпуса датчиков описанного типа служат, кроме крепления по меньшей мере одной трубки датчика, дополнительно также для защиты трубки датчика, возбуждающего механизма и сенсорного средства, а также других расположенных внутри компонентов от внешних воздействий среды, таких, например, как пыль и водяные брызги. Пользователь также часто требует, чтобы такие корпуса датчиков и особенно их корпусные крышки были в состоянии противостоять, без утечки, по меньшей мере в течение заранее заданного периода времени, внутреннему давлению, по большей части заметно превосходящему внешнее давление, возникающему в случае разрыва трубчатого сегмента трубки датчика. По меньшей мере для применений, включающих в себя токсичные или легковоспламеняющиеся среды, корпус датчика должен быть в состоянии выполнять требования, подходящие для безопасного сосуда. Дополнительно требуется также достаточное подавление звуковых излучений, возможно производимых измерительным датчиком.
Разработки в области измерительных датчиков вибрационного типа достигли тем временем такого уровня, что современные измерительные датчики описанного вида могут использоваться практически почти для всех применений технологии потоковых измерений и могут удовлетворить самым высоким требованиям этой области. Таким образом, такие измерительные датчики используются на практике для скоростей массопереноса от нескольких г/ч (грамм в час) до нескольких т/с (тонн в секунду), при давлениях до 100 бар для жидкостей или даже более 300 бар для газов. Достигаемая точность измерений в таких случаях обычно составляет приблизительно 99,9% от истинного значения или выше, или ошибка измерения около 0,1%, с нижней границей гарантированного диапазона измерений, лежащей в пределах 1% от конечного значения диапазона измерений. В силу высокого диапазона их применимости, предлагаются измерительные датчики описанного вида, в зависимости от области применения, дополнительно с номинальными диаметрами, лежащими в диапазоне, измеренном на фланце, от 1 до 250 мм и даже выше.
По мере того, как номинальный диаметр измерительных датчиков вибрационного типа становится больше, их установленная масса практически по своей природе тоже увеличивается. Такие измерительные датчики, включающие в себя возможно присоединяемые к ним фланцы, выросли тем временем по меньшей мере в отдельных случаях или в мелкосерийном производстве до установленных масс намного больше 500 кг. Однако следует понимать, что с учетом только структурных ситуаций на заводах необходимо, чтобы имелись ограничения для дальнейших отмеченных увеличений в установленных массах таких измерительных датчиков. Учитывая также, что установленная масса растет более чем пропорционально номинальному диаметру измерительных датчиков, чтобы достичь высокой механической стабильности, обычно требуемой для измерительных датчиков описанного вида, то кажется, что приведенные выше размеры уже представляют верхний предел, для экономически осуществимых в настоящее время измерительных датчиков вибрационного типа. В случае описанных выше традиционных форм конструкции, соответствующее отношение установленной массы к номинальному диаметру всей установленной массы измерительного датчика к его номинальному диаметру для номинального диаметра менее 150 мм обычно составляет меньше 1 кг/мм, в то время как для номинальных диаметров выше 150 мм, а особенно превышающих 200 мм, это отношение должно лежать значительно выше 1,5 кг/мм. Учитывая, что в случае измерительных датчиков описанной выше конструкции с номинальными диаметрами больше 150 мм и при использовании обычных ныне материалов, ожидается очень большое отношение установленной массы к номинальному диаметру, оказывается, что для измерительных датчиков вибрационного типа увеличение их номинального диаметра уже вряд ли возможно без соответствующего значительного увеличения установленных масс.
Как результат конкретных ограничений соответствующих максимальных установленных масс существуют особая проблема при разработке измерительных датчиков большого номинального диаметра, состоящая в том, что вследствие вынужденной очень большой общей массы вышеупомянутой внутренней колебательной системы (масса самой трубки датчика, масса части объема подлежащей измерению среды, мгновенно передаваемой в трубке датчика, общая масса возбуждающего механизма и сенсорного средства и т.д.), внешняя колебательная система измерительного датчика, образованная по меньшей мере корпусом датчика, включающим в себя несущий цилиндр или несущую рамку, в зависимости от обстоятельств, и возможно предусмотренные распределительные части и (или) фланцы, должны становиться даже более легкими по сравнению с внутренней колебательной системой. Другими словами, такие измерительные датчики с большими номинальными диаметрами должны быть вследствие чаще всего большой установленной массы спроектированы так, чтобы по сравнению с традиционными измерительными датчиками с меньшими номинальными диаметрами массовое отношение общей массы внешней колебательной системы к общей массе внутренней колебательной системы было малым.
Тем не менее, последние исследования показали, что в случае сравнительно малых массовых отношений (общая масса внешней колебательной системы: общая масса внутренней колебательной системы) меньше 4:1, которые могут возникнуть вследствие описанных выше ограничений на все еще осуществимую установленную массу измерительного датчика, особенно в случае измерительных датчиков большого номинального диаметра, особенно в случае измерительных датчиков традиционной конструкции с номинальным диаметром больше 200 мм, собственные частоты внешней колебательной системы, к сожалению, сдвигаются совсем близко к желательной частоте колебаний и даже в желательный частотный диапазон. В результате этого может, например, возникнуть нежелательная ситуация, что внутренние колебания, происходящие, как и должно быть, на желательной частоте колебаний, возбуждают внешнюю колебательную систему на резонансных колебаниях, которые затем налагаются на колебания внутренней колебательной системы и таким образом могут значительно влиять или даже сделать совершенно бесполезным сигнал измерения колебаний, переданный сенсорным средством. Мешающие колебания в этом случае вызваны в значительной степени компонентами внешней колебательной системы, особенно упомянутыми сегментами корпуса, которые изготовлены с толщиной стенок по большей части меньше 5 мм, таким образом почти тонкостенные, но в то же время достаточно большие по отношению к площади поверхности. Например, частотный спектр, показанный для примера на фиг.2, был экспериментально определен для внешней колебательной системы с конструкцией, описанной в WO-A 03/021202 и схематически изображенной на фиг.1A, B, включающей в себя опорную трубку и прикрепленную к ней корпусную крышку. Совершенно понятно, что внешняя колебательная система возбуждает выраженные режимы колебаний на примерно 255 Гц и примерно 259 Гц при вышеупомянутом желательном частотном диапазоне внутренней колебательной системы измерительного датчика, определенной находящейся в диапазоне от примерно 210 до 270 Гц. В соответствии с этим, в случае описанной конфигурации измерительного датчика, внешняя колебательная система будет резонировать практически по всему желательному частотному диапазону, который должен быть на деле свободен от помех. Вследствие этого сигналы вибрационных измерений, определенные в данном случае, особенно сигналы для измерений скорости массопереноса или для измерений плотности, будут по существу совершенно непригодны.
Возможность снизить такие вредные колебания, приходящие от внешней колебательной системы, состоит, например, как предложено в WO-A 01/33174, в присоединении дополнительной массы к корпусу датчика, чтобы резонировать с корпусом датчика и, следовательно, умышленно вызывать расстройку внешней колебательной системы относительно внутренней колебательной системы. Недостатком такого решения является (в отношении использования измерительных датчиков с большим номинальным диаметром) то, что это, в свою очередь, приведет к дополнительному увеличению уже и без того очень большой установленной массы измерительного датчика.
Исходя из описанного выше уровня техники, цель настоящего изобретения состоит в том, чтобы предложить измерительный датчик вибрационного типа, который, особенно при сохранении уже установленных и проверенных форм конструкции, проявляет, даже при большом номинальном диаметре, наивысшую возможную точность измерений в 99,8% или выше и таким образом дает ошибку измерения меньше чем 0,2%.
Для достижения этой цели измерительный датчик вибрационного типа для измерения текучей среды, транспортируемой в трубопроводе, особенно газа, жидкости, порошка или какого-либо другого текучего вещества, содержит:
- корпус который проявляет множество естественных режимов колебаний;
- по меньшей мере первую трубку для транспортировки по меньшей мере части объема подлежащей измерению среды, причем упомянутая трубка удерживается с возможностью колебаний в корпусе датчика и вибрирует по меньшей мере время от времени;
- электромеханический, особенно электродинамический возбуждающий механизм, действующий в по меньшей мере одной трубке датчика для выработки и (или) поддержания механических колебаний по меньшей мере одной трубки датчика;
- сенсорное средство, реагирующее на движения, особенно на изгибающие колебания трубки датчика для выработки по меньшей мере одного сигнала измерения, представляющего колебания трубки датчика, а также
- по меньшей мере первый опорный элемент, прикрепленный главным образом непосредственно к корпусу датчика и служащий для формирования практически локально фиксированных узлов в корпусе датчика для подавления или уничтожения по меньшей мере одного естественного режима колебаний в корпусе датчика;
- при этом внешняя колебательная система измерительного датчика формируется корпусом датчика и по меньшей мере одним опорным элементом, а внутренняя колебательная система измерительного датчика формируется по меньшей мере одной трубкой датчика, средой, по меньшей мере мгновенно транспортируемой в ней, и по меньшей мере частично возбуждающим механизмом и сенсорным средством; и
- при этом внутренняя колебательная система, приводимая в действие возбуждающим механизмом, осуществляет по меньшей мере время от времени во время работы измерительного датчика механические колебания, главным образом в форме поперечных колебаний, имеющие по меньшей мере одну желательную частоту колебаний,
- которая зависит от размера, формы и материала трубки датчика, а также от мгновенной плотности среды, и
- которая во время работы измерительного датчика является переменной в заранее заданном желательном частотном диапазоне, имеющем нижнюю и верхнюю предельные частоты.
В первом варианте осуществления измерительного датчика по изобретению корпус датчика и по меньшей мере один опорный элемент так сформированы и так механически соединены друг с другом, что внешняя колебательная система измерительного датчика, по меньшей мере сформированная таким образом, несмотря на колебания трубки датчика, не генерирует по меньшей мере в желательном частотном диапазоне нежелательных помех или, возможно, генерирует только такие нежелательные помеховые колебания, мгновенно рассеиваемая помеховая мощность колебаний которых значительно меньше мощности желательных колебаний мгновенно рассеиваемой на желательной частоте колебаний колебаниями внутренней колебательной системы.
Во втором варианте осуществления измерительного датчика по изобретению отношение мощности желательных колебаний к мощности помеховых колебаний по меньшей мере больше 2, главным образом больше 5. В основном, мощность помеховых колебаний соответствует в этом случае среднему значению мощностей всех колебаний, мгновенно рассеиваемых в желательном частотном диапазоне колебаниями помех.
В третьем варианте осуществления измерительного датчика по изобретению корпус датчика и по меньшей мере один опорный элемент так сформированы и так механически соединены друг с другом, что внешняя колебательная система измерительного датчика, по меньшей мере сформированная таким образом, несмотря на колебания трубки датчика, не генерирует по меньшей мере в желательном частотном диапазоне нежелательных помех или, возможно, генерирует только такие нежелательные помеховые колебания, мгновенная максимальная амплитуда помеховых колебаний которых значительно меньше мгновенной максимальной амплитуды колебаний для колебаний внутренней колебательной системы, особенно самой трубки датчика.
В четвертом варианте осуществления измерительного датчика по изобретению отношение мгновенной максимальной амплитуды колебаний внутренней колебательной системы к мгновенной максимальной амплитуде помех больше 1,5, а главным образом больше 2.
В пятом варианте осуществления измерительного датчика по изобретению корпус датчика и по меньшей мере один опорный элемент так сформированы и так механически соединены друг с другом, что внешняя колебательная система измерительного датчика, по меньшей мере сформированная таким образом, несмотря на колебания трубки датчика, не генерирует по меньшей мере в желательном частотном диапазоне нежелательных помех или, возможно, генерирует только такие нежелательные помеховые колебания, мгновенный показатель качества помеховых колебаний которых значительно меньше мгновенного показателя качества колебаний внутренней колебательной системы на желательной частоте колебаний.
В шестом варианте осуществления измерительного датчика по изобретению отношение показателя качества колебаний внутренней колебательной системы к показателю качества помеховых колебаний по меньшей мере равен 50:1, а главным образом больше 80.
В седьмом варианте осуществления измерительного датчика по изобретению сенсорное средство включает в себя первый датчик колебаний, особенно расположенный на входном конце по меньшей мере одной трубки датчика, а также второй датчик колебаний, особенно расположенный на выходном конце по меньшей мере одной трубки датчика.
В восьмом варианте осуществления измерительного датчика по изобретению возбуждающий механизм включает в себя по меньшей мере один возбудитель колебаний, особенно расположенный посредине по меньшей мере одной трубки датчика.
В девятом варианте осуществления измерительного датчика по изобретению корпус датчика включает в себя главным образом стальной несущий элемент, с которым по меньшей мере одна трубка датчика механически соединена на его входном и выходном концах. В дальнейшем развитии этого варианта осуществления измерительного датчика по изобретению несущий элемент корпуса датчика реализован как главным образом трубчатый несущий цилиндр, с которым по меньшей мере одна трубка датчика механически соединена на его входном и выходном концах. В дальнейшем развитии этого варианта осуществления измерительного датчика по изобретению несущий элемент имеет массу по меньшей мере 70 кг, в основном более 140 кг, и (или) длину по меньшей мере 1000 мм, в основном более 1200 мм.
В десятом варианте осуществления измерительного датчика по изобретению по меньшей мере одна трубка датчика имеет по меньшей мере один изогнутый трубный сегмент. В дальнейшем развитии этого варианта осуществления измерительного датчика по изобретению по меньшей мере одна трубка датчика имеет по меньшей мере один практически U- или V-образный трубный сегмент. В дальнейшем развитии этого варианта осуществления измерительного датчика по изобретению корпус датчика имеет корпусный сегмент, размещенный поперечно рядом с по меньшей мере одним изогнутым трубчатым сегментом по меньшей мере одной трубки датчика, особенно проходящий по меньшей мере кусочно практически параллельно изогнутому трубному сегменту и (или) имеющий практически плоскую форму, с предпочтительно по меньшей мере двумя корпусными сегментами, расположенными напротив друг друга таким образом, что по меньшей мере один изогнутый трубный сегмент по меньшей мере одной трубки датчика проходит по меньшей мере частично между двумя корпусными сегментами. Предпочтительно, в данном случае по меньшей мере один опорный элемент прикрепляется по меньшей мере частично к корпусным сегментам.
В одиннадцатом варианте осуществления измерительного датчика по изобретению по меньшей мере один опорный элемент сформирован с помощью по меньшей мере одной сплошной пластины, которая соединяется с корпусом датчика по меньшей мере в двух противостоящих друг другу местах главным образом с помощью винтов и (или) по меньшей мере частично с возможностью съема.
В одиннадцатом варианте осуществления измерительного датчика по изобретению по меньшей мере один опорный элемент имеет массу по меньшей мере 3 кг.
В тринадцатом варианте осуществления измерительного датчика по изобретению по меньшей мере один опорный элемент по меньшей мере точечно приварен и (или) припаян главным образом тугоплавким или твердым припоем к трубке датчика.
В четырнадцатом варианте осуществления измерительного датчика по изобретению по меньшей мере один опорный элемент по меньшей мере точечно прикреплен винтом к трубке датчика.
В пятнадцатом варианте осуществления измерительного датчика по изобретению по меньшей мере один опорный элемент по меньшей мере точечно прикреплен к трубке датчика в области пучности колебаний, особенно амплитуды локальных колебаний, естественного режима колебаний корпуса датчика.
В шестнадцатом варианте осуществления измерительного датчика по изобретению предусмотрена по меньшей мере одна гасящая колебания прокладка, соединенная с корпусом датчика, в основном проходящая, по меньшей мере частично, между по меньшей мере одним опорным элементом и корпусом датчика. В дальнейшем развитии этого варианта осуществления по изобретению гасящая колебания прокладка сделана из пластмассы, резины, кремнийорганического соединения или чего-то подобного. В другом дальнейшем развитии этого варианта осуществления по изобретению прокладка проходит, по меньшей мере частично, между по меньшей мере одним опорным элементом и корпусом датчика.
В семнадцатом варианте осуществления измерительного датчика по изобретению он дополнительно включает в себя второй опорный элемент, прикрепленный аналогичным образом, в основном непосредственно, к корпусу датчика, в основном второй опорный элемент практически идентичен первому опорному элементу, для формирования практически локально фиксированных узлов колебаний в корпусе датчика, причем внешняя колебательная система измерительного датчика включает в себя по меньшей мере второй опорный элемент. В дальнейшем развитии этого варианта осуществления измерительного датчика по изобретению сенсорное средство включает в себя первый датчик колебаний, в основном первый датчик колебаний, установленный на входном конце по меньшей мере одной трубки датчика, а также второй датчик колебаний, в основном расположенный на выходном конце по меньшей мере одной трубки датчика, и первый опорный элемент прикреплен к корпусу датчика, по меньшей мере частично, вблизи от первого сенсорного датчика, а второй опорный элемент прикреплен, по меньшей мере частично, вблизи от второго датчика колебаний.
В восемнадцатом варианте осуществления измерительного датчика по изобретению он дополнительно имеет третий опорный элемент, прикрепленный аналогичным образом, в основном непосредственно, к корпусу датчика для формирования практически локально фиксированных колебательных узлов в корпусе датчика, причем внешняя колебательная система измерительного датчика включает в себя по меньшей мере также третий опорный элемент. В дальнейшем развитии этого варианта осуществления измерительного датчика по изобретению возбуждающий механизм включает в себя по меньшей мере один возбудитель колебаний, в основном возбудитель, размещенный посредине по меньшей мере одной трубки датчика, а третий опорный элемент по меньшей мере частично прикреплен к корпусу датчика вблизи от возбудителя колебаний.
В девятнадцатом варианте осуществления измерительного датчика по изобретению устройство дополнительно имеет на входном конце первый соединительный фланец, а также на выходном конце второй соединительный фланец для присоединения измерительного датчика к трубопроводу, причем внешняя колебательная система измерительного датчика включает в себя также по меньшей мере первый и второй соединительные фланцы. В дальнейшем развитии этого варианта осуществления измерительного датчика по изобретению каждый из двух соединительных фланцев имеет в этом случае массу больше 50 кг, в основном больше 60 кг.
В двадцатом варианте осуществления измерительного датчика по изобретению он включает в себя дополнительно вторую трубку датчика, практически идентичную первой трубке датчика и (или) проходящую практически параллельно первой трубке датчика. В дальнейшем развитии этого варианта осуществления измерительного датчика по изобретению устройство дополнительно имеет по меньшей мере первую узловую пластину, соединяющую первую и вторую трубки датчика вместе на их входных концах, а также по меньшей мере вторую узловую пластину, соединяющую первую и вторую трубы вместе на их выходных концах, причем внутренняя колебательная система измерительного датчика включает в себя по меньшей мере также первую и вторую узловые пластины. В другом дальнейшем развитии этого варианта осуществления измерительного датчика по изобретению он дополнительно имеет по меньшей мере первый распределительный элемент, соединяющий первую и вторую трубки датчика вместе на их входных концах, а также второй распределительный элемент, соединяющий первую и вторую трубки датчика вместе на их выходных концах, причем внешняя колебательная система измерительного датчика включает в себя также по меньшей мере первый и второй распределительные элементы. В основном, каждый из двух распределительных элементов имеет в таком случае массу более 10 кг и обычно более 20 кг.
В двадцать первом варианте осуществления измерительного датчика по изобретению мгновенная желательная частота колебаний соответствует практически мгновенной естественной собственной частоте внутренней колебательной системы.
В двадцать втором варианте осуществления измерительного датчика по изобретению внешняя колебательная система измерительного датчика имеет по меньшей мере один режим колебаний с наименьшей естественной собственной частотой, которая меньше, чем нижняя предельная частота желательного частотного диапазона.
В двадцать третьем варианте осуществления измерительного датчика по изобретению внутренняя колебательная система имеет по меньшей мере один режим колебаний с естественной собственной частотой, которая во время работы всегда больше нижней естественной собственной частоты внешней колебательной системы.
В двадцать четвертом варианте осуществления измерительного датчика по изобретению внешняя колебательная система имеет по меньшей мере один режим колебаний с естественной собственной частотой, которая меньше, чем верхняя предельная частота желательного частотного диапазона, и больше, чем нижняя предельная частота желательного частотного диапазона.
В двадцать пятом варианте осуществления измерительного датчика по изобретению верхняя предельная частота желательного частотного диапазона определяется для того условия, что плотность среды по существу равна нулю, в основном приблизительно равна плотности воздуха.
В двадцать шестом варианте осуществления измерительного датчика по изобретению нижняя предельная частота желательного частотного диапазона определяется для того условия, что плотность среды больше 400 кг/м3.
В двадцать седьмом варианте осуществления измерительного датчика по изобретению нижняя предельная частота желательного частотного диапазона определяется для того условия, что плотность среды меньше 2000 кг/м3.
В двадцать восьмом варианте осуществления измерительного датчика по изобретению верхняя предельная частота желательного частотного диапазона определяется для того условия, что вязкость среды меньше 100·10-6 Па, в основном приблизительно равна вязкости воздуха.
В двадцать девятом варианте осуществления измерительного датчика по изобретению нижняя предельная частота желательного частотного диапазона определяется для того условия, что вязкость среды больше 300·10-6 Па.
В тридцатом варианте осуществления измерительного датчика по изобретению нижняя предельная частота желательного частотного диапазона определяется для того условия, что вязкость среды меньше 3000·10-6 Па.
В тридцать первом варианте осуществления измерительного датчика по изобретению желательный частотный диапазон имеет ширину диапазона по меньшей мере 20 Гц, в основном больше 50 Гц.
В тридцать втором варианте осуществления измерительного датчика по изобретению по меньшей мере одна трубка датчика и корпус датчика состоят из стали, в основном из высококачественной и (или) нержавеющей стали.
В тридцать третьем варианте осуществления измерительного датчика по изобретению по меньшей мере одна трубка датчика имеет массу по меньшей мере 10 кг, в основном больше 25 кг.
В тридцать четвертом варианте осуществления измерительного датчика по изобретению трубка датчика имеет внутренний диаметр по меньшей мере 80 мм, в основном больше 100 мм.
В тридцать пятом варианте осуществления измерительного датчика по изобретению трубка датчика имеет длину по меньшей мере 1000 мм, в основном больше 1500 мм.
В тридцать шестом варианте осуществления измерительного датчика по изобретению трубка датчика имеет массу по меньшей мере 80 кг, в основном больше 160 кг.
В тридцать седьмом варианте осуществления измерительного датчика по изобретению корпус датчика имеет минимальную толщину стенки меньше 6 мм.
В тридцать восьмом варианте осуществления измерительного датчика по изобретению общая масса внутренней колебательной системы достигает по меньшей мере 70 кг. В дальнейшем развитии этого варианта осуществления измерительного датчика по изобретению общая масса во время работы составляет, по меньшей мере время от времени, более 90 кг.
В тридцать девятом варианте осуществления измерительного датчика по изобретению общая масса внешней колебательной системы достигает по меньшей мере 200 кг. В дальнейшем развитии этого варианта осуществления измерительного датчика по изобретению общая масса превышает 300 кг.
В сороковом варианте осуществления измерительного датчика по изобретению массовое отношение общей массы внешней колебательной системы к общей массе внутренней колебательной системы составляет во время работы, по меньшей мере время от времени, меньше 3, в основном меньше 2,5. В дальнейшем развитии этого варианта осуществления измерительного датчика по изобретению массовое отношение общей массы внешней колебательной системы к общей массе внутренней колебательной системы постоянно меньше 3.
В сорок первом варианте осуществления измерительного датчика по изобретению отношение установленной массы измерительного датчика к номинальному диаметру измерительного датчика, соответствующему калибру трубопровода, в который должен вставляться этот измерительный датчик, достигает более 2 кг/мм.
В сорок втором варианте осуществления измерительного датчика по изобретению установленная масса всего измерительного датчика превышает 200 кг, в основном более 400 кг.
В первой разновидности данного варианта осуществления изобретения по меньшей мере одна трубка датчика имеет изогнутый трубный сегмент, а несущий элемент внедрен как поперечный по меньшей мере частично открытый, в основном трубчатый, несущий цилиндр, который таким образом соединен с по меньшей мере одной трубкой датчика, что по меньшей мере один изогнутый трубный сегмент выступает поперечно из несущего цилиндра. Далее, корпус датчика включает в себя корпусную крышку, прикрепленную, в основном постоянно и (или) умеренно плотно, к несущему элементу и установленную на расстоянии от по меньшей мере одного изогнутого трубного сегмента датчика.
В первом варианте осуществления первой разновидности измерительного датчика по изобретению корпусная крышка имеет массу по меньшей мере 10 кг, в основном больше 20 кг.
Во втором варианте осуществления первой разновидности измерительного датчика по изобретению по меньшей мере один опорный элемент прикреплен частично к корпусной крышке, а частично - к несущему цилиндру.
В третьем варианте осуществления первой разновидности измерительного датчика по изобретению по меньшей мере один опорный элемент сформирован с помощью по меньшей мере одной сплошной пластины, которая прикрепляется по меньшей мере точечно, в основном по меньшей мере частично с возможностью съема и (или) по меньшей мере точечно прикрепляется как к корпусной крышке, так и к несущему цилиндру
В четвертом варианте осуществления первой разновидности измерительного датчика по изобретению корпусная крышка включает в себя корпусные сегменты, расположенные поперечно рядом по меньшей мере с одним изогнутым трубным сегментом по меньшей мере одной трубки датчика, в основном проходящие, по меньшей мере частично, практически параллельно изогнутому трубному сегменту и (или) имеющие в основном плоскую форму, с предпочтительно по меньшей мере двумя корпусными сегментами, расположенными напротив друг друга таким образом, что по меньшей мере один изогнутый трубный сегмент по меньшей мере одной трубки датчика продолжается по меньшей мере частично между двумя корпусными сегментами. В дальнейшем развитии этого осуществления первого варианта корпусная крышка включает в себя желобообразный первый корпусной сегмент, имеющий форму круговой дуги, с первым краем сегмента заранее заданного радиуса и со вторым краем сегмента, сформированным в основном идентично первому краю сегмента, причем первый корпусной сегмент имеет поперечное сечение в форме круговой дуги с радиусом меньшим, чем радиус первого края сегмента. Дополнительно, корпусная крышка включает в себя в основном плоский второй корпусной сегмент, соединенный через первый край сегмента в форме круговой дуги с первым краем сегмента первого корпусного сегмента, а также третий корпусной сегмент, в основном зеркально симметричный второму корпусному сегменту и соединенный через первый край сегмента в форме круговой дуги со вторым краем первого корпусного сегмента, при этом второй и третий корпусные сегменты предпочтительно лежат каждый в касательной плоскости первого корпусного сегмента.
Во второй разновидности измерительного датчика по изобретению корпус датчика включает в себя несущую рамку, таким образом соединенную механически с по меньшей мере одной трубкой датчика на ее входном и выходном концах, что по меньшей мере один изогнутый трубный сегмент тянется вдоль несущей рамки, первый корпусной сегмент, который расположен поперечно около по меньшей мере одного изогнутого трубного сегмента по меньшей мере одной трубки датчика, в основном проходящий, по меньшей мере частично, практически параллельно изогнутому трубному сегменту и (или) в основном плоской формы и который прикреплен к несущей рамке, в основном постоянно или умеренно плотно, а также второй корпусной сегмент, который расположен около по меньшей мере одного изогнутого трубного сегмента по меньшей мере одной трубки датчика, в основном, по меньшей мере частично, проходящий практически параллельно изогнутому трубному сегменту и (или) в основном плоской формы и который прикреплен к несущей рамке, в основном постоянно и (или) умеренно плотно. Дополнительно два корпусных сегмента размещены в этой второй разновидности таким образом напротив друг друга, что по меньшей мере один изогнутый трубный сегмент по меньшей мере одной трубки датчика проходит, по меньшей мере частично, между этими двумя корпусными сегментами.
Основная идея изобретения состоит в использовании дополнительных опорных элементов для создания внешней колебательной системы, т.е. тех компонентов измерительного датчика, механические колебания которых во время работы измерительного датчика, если они существуют, являются нежелательными и, следовательно, возможными помеховыми колебаниями, такими, что внешняя колебательная система действует как заграждающий полосовой фильтр для по меньшей мере тех частот колебаний, которые лежат в желательно частотном диапазоне, который, в свою очередь, заранее заданным образом зависит от характеристик внутренней колебательной системы. Другими словами, путем намеренной расстройки внешней колебательной системы относительно внутренней колебательной системы посредством опорных элементов создается блокированный частотный диапазон, исключающий потенциальные помеховые колебания. В пределах блокированного частотного диапазона возможные помеховые колебания внешней колебательной системы по меньшей мере эффективно подавляются. Изобретение основывается в данном случае, помимо прочего, на понимании того, что потенциальные вредные колебания в области желательного частотного диапазона преимущественно определяются характеристиками колебаний тонкостенных и обладающих очень большой поверхностью корпусных сегментов, если они существуют, и что особенно эффективное удаление помех измерительного датчика может произойти при правильном размещении опорных элементов, даже после размещения всего нескольких таких дополнительных элементов, дающих точки фиксации в корпусе датчика и тем самым при только относительно незначительной добавленной массе.
Преимущество настоящего изобретения состоит в том, что уже при использовании нескольких опорных элементов, служащих, в принципе, для увеличения изгибной жесткости корпусных сегментов и, таким образом, без большого усложнения по сравнению с традиционными измерительными датчиками, можно реализовать желательный частотный диапазон или блокированный частотный диапазон для потенциальных помеховых колебаний, который для практической работы измерительных датчиков с критическим отношением установленной массы к номинальному диаметру больше 1,5 кг/мм, в основном больше 2 кг/мм, и (или) критическим отношением общей массы внешней колебательной системы к общей массе внутренней колебательной системы меньше 4, в основном меньше 3, почти совершенно свободен от помеховых колебаний в достаточно широком частотном диапазоне. Дополнительное преимущество настоящего изобретения состоит в том, что создается возможность, за счет которой измерительные датчики вибрационного типа также с большим номинальным диаметром свыше 150 мм, особенно с номинальным диаметром больше 200 мм, могут быть, с одной стороны, реализованы на экономически здравом базисе, а, с другой стороны, установленная масса остается осуществимой. Дополнительное преимущество настоящего изобретения состоит в том, что в этом случае могут быть сохранены уже установленные и проверенные формы конструкции.
Измерительный датчик по изобретению поэтому особенно пригоден для измерения текучих сред, транспортируемых в трубопроводе с калибром больше 150 мм, особенно 250 мм или выше. Дополнительно, измерительный датчик также пригоден для измерения скоростей массопереноса, которые по меньшей мере время от времени превышают 900 т/ч, особенно по меньшей мере время от времени больше 1200 т/ч, такие, которые могут возникать, например, в случае применений, включающих в себя измерение нефти, природного газа или других нефтехимических веществ.
Далее изобретение будет подробно объяснено на основе примеров вариантов осуществления и чертежей. Функционально равноценные части обозначены на отдельных чертежах одними и теми же ссылочными номерами, которые, однако, повторяются на последующих фигурах только, если это оказывается полезным.
На фиг.1A, 1B показаны две проекции традиционного встроенного в линию измерительного прибора, например, служащего в качестве измерительного датчика кориолисова потока/плотности/вязкости, основанного на измерительном датчике вибрационного типа;
фиг.2 показывает экспериментально определенный спектр механических собственных частот измерительного датчика вибрационного типа, используемого для встроенного в линию измерительного устройства, показанного на фиг.1A, 1B;
На фиг.3А, 3B показаны две проекции встроенного в линию измерительного устройства, служащего в качестве измерительного датчика кориолисова потока/плотности/вязкости, основанного на усовершенствованном измерительном датчике вибрационного типа;
фиг.4-7 показывают различные, иногда в разрезе, виды сбоку и детали первой разновидности измерительного датчика, подходящего для встроенного в линию измерительного устройства, показанного на фиг.3А, 3B;
фиг.8 показывает экспериментально определенный спектр механических собственных частот измерительного датчика, согласно фиг.4-7; и
на фиг.9-11 показаны различные проекции виды сбоку в разрезе и детали второй разновидности измерительного датчика, подходящего для встроенного в линию измерительного устройства, показанного на фиг.3А, 3B;
На фиг.3А, 3B представлено встроенное в линию измерительное устройство 1, в особенности используемое как устройство измерения кориолисовой скорости массопереноса и (или) плотности, которое служит для регистрации скорости m массопереноса среды, текущей в трубопроводе (не показан), и для отражения ее в измеренном значении Xm, мгновенно представляющем эту скорость массопереноса. Средой может быть практически любая текучая субстанция, в особенности порошок, жидкость, газ, пар или тому подобное. В качестве альтернативы или в дополнение, встроенное в линию измерительное устройство 1 может, если требуется, использоваться для измерения плотности ρ и (или) вязкости η среды. Измерительный датчик, главным образом, предназначен для измерения таких сред как, например, нефть, природный газ или другие нефтехимические вещества, которые текут в трубопроводе, имеющем калибр более 150 мм, в основном калибр 250 мм и выше, и (или) которые имеют, по меньшей мере время от времени, скорость массопереноса более 900 т/ч, в основном больше 1200 т/ч. Линейное измерительное устройство 1 включает в себя для этого измерительный датчик 10 вибрационного типа, через который протекает среда, подлежащая измерению во время работы, а также электроника 20 измерительного устройства, соединенная с измерительным датчиком 10. Электроника 20 измерительного устройства не показана здесь в деталях, но вместо этого только схематически показывается как блок. Преимущественно, электроника 20 измерительного устройства сконструирована таким образом, что она может обмениваться измерениями и (или) другими рабочими данными с блоком обработки измеренного значения, подчиненным ей, например, с программируемым логическим контроллером (PLC), персональным компьютером и (или) рабочей станцией через систему передачи данных, например систему с сетевой шиной. Дополнительно, электроника измерительного устройства сконструирована так, что она может питаться от внешнего источника энергии или мощности, например, также по вышеупомянутой системе с сетевой шиной. Для того чтобы встроенное в линию измерительное устройство имело средства для соединения с системой с сетевой шиной или другой системой связи, специально запрограммированная электроника измерительного устройства имеет дополнительно подходящий интерфейс связи для передачи данных, например для передачи данных измерений к уже упомянутому программируемому логическому контроллеру или к подчиненной системе управления процессом.
На фиг.4-7 представлен в различных видах пример варианта осуществления первой разновидности измерительного датчика 1, служащего, в основном, в качестве датчика кориолисовой скорости массопереноса, плотности и (или) вязкости, в то время как на фиг.9-11 иллюстрируется пример варианта осуществления второй разновидности такого измерительного датчика. Как уже указано выше, измерительный датчик служит для выработки таких механических противодействующих сил, особенно сил Кориолиса, зависящих от скорости массопереноса, сил инерции, зависящих от плотности среды, и (или) сил трения, зависящих от вязкости среды. Эти силы ощутимо реагируют, главным образом способом, регистрируемым датчиком, на измерительный датчик. На основе этих противодействующих сил, описывающих среду, могут быть, например, измерены скорость массопереноса, плотность и (или) вязкость, известными специалистам в данной области техники способами посредством вычислительных методов, подходящим образом воплощенных в электронике измерительного устройства. Измерительный датчик 1 во время работы вставляется в линию трубопровода (не показан) с помощью фланцев 2 и 3. Подлежащая измерению среда, главным образом порошок, жидкость, газообразная или парообразная среда, протекает через этот трубопровод. Вместо использования фланцев измерительный датчик 1 может также быть присоединен к указанному трубопроводу с использованием других средств, таких как, например, соединители с тройным зажимом или резьбовые соединения.
Для транспортировки части объема среды, подлежащей измерению, измерительный датчик включает в себя по меньшей мере одну трубку 4 датчика, служащую как измерительная труба и поддерживаемую в колебательном состоянии в корпусе 10 датчика. В процессе работы трубка 4 находится в связи с трубопроводом и приводится в состояние вибрации по меньшей мере время от времени, в по меньшей мере одном колебательном режиме, подходящем для определения физической измеряемой переменной. Кроме корпуса 10 датчика и по меньшей мере одной трубки 4 датчика, находящейся в нем, измерительный датчик 1 включает в себя электромеханический, главным образом электродинамический возбуждающий механизм 60, воздействующий на по меньшей мере одну трубку 4 датчика для выработки и (или) поддержания механических колебаний, а также сенсорное средство 70, реагирующее на механические колебания, особенно на поперечные колебания, трубки 4 датчика для выработки по меньшей мере одного сигнала svb измерения колебаний, представляющего колебания трубки 4 датчика. По меньшей мере одна трубка датчика, а также дополнительно прикрепляемые к ней компоненты, такие как, например, часть возбуждающего механизма 60 и часть сенсорного средства 70, таким образом формируют, по существу, внутреннюю колебательную систему измерительного датчика.
Для определения по меньшей мере одного физического измеряемого сигнала на основе по меньшей мере одного сигнала измерения колебания возбуждающий механизм 60 и сенсорное средство 70 дополнительно, как обычно для таких измерительных датчиков, связаны подходящим образом, например, гальванически и (или) оптоэлектронно с измерительной и управляющей схемой, предусмотренной в электронике 20 измерительного устройства. Измерительная и управляющая схема, в свою очередь, вырабатывает, с одной стороны, сигнал sxc возбудителя, управляемый, например, по отношению к току возбудителя и (или) напряжению возбудителя, и подходящим образом управляющий возбуждающим механизмом 60. С другой стороны, измерительная и управляющая схема принимает по меньшей мере один сигнал svb измерения колебания от сенсорного средства 70 и генерирует из него нужные желательные измеренные значения, которые, например, могут представлять скорость массопереноса, плотность и (или) вязкость среды, подлежащей измерению, и которые могут отображаться, если требуется, на месте или также, если требуется, обрабатываться дальше на более высоком уровне. Электроника 20 измерительного устройства, включающая в себя измерительную и управляющую схемы, может, например, размещаться в отдельном корпусе 9 электроники, который располагается удаленно от измерительного датчика, или же для формирования единого компактного устройства крепится непосредственно на измерительном датчике 1, например, снаружи на корпусе 10 датчика. В случае примера варианта осуществления, показанного на фиг.1, предусмотрена переходная деталь 8 на корпусе датчика, служащая для крепления корпуса 9 электроники. На фиг.4-6, однако, переходная деталь 8 и корпус 9 электроники опущены; только на фиг.6 можно видеть углубленную посадочную поверхность 63 в стенке корпуса 10 датчика для крепления переходной детали 8. В посадочной поверхности 63 размещено отверстие 64 для электропитания, с помощью которого обеспечиваются электрические соединения для возбуждающего механизма 60 и для сенсорного средства 70, а также для других электрических компонентов, таких как, например, датчики давления и (или) температуры, возможно присутствующие в измерительном датчике.
Измерительный датчик 1 включает в себя, как уже было указано, по меньшей мере одну трубку 4 датчика, служащую в качестве измерительной трубки, в предпочтительном варианте осуществления изобретения вместе с по меньшей мере одной трубкой 4 датчика, имеющей по меньшей мере один трубный сегмент 41, изогнутый по меньшей мере частично в по меньшей мере одной плоскости. Трубка 4 датчика может, в таком случае, иметь, например, отчетливую U-образную форму, такую, как так же показано в патенте США US-B 6776052, или как показано на фиг.4-6, а также она может иметь выраженную V-образную форму, как предложено в патентах США US-B 6802224 или US-B 6711958. Кроме того, трубка датчика может быть такой же, как описано в US-A 5796011, только незначительно изогнута прямоугольно или трапецеидально, или, как показано в WO-A 01/65213, US-B 6308580, US-A 5301557, US-A 6092429 или US-А 6044715, изогнута четко прямоугольно или трапецеидально. Подходящим материалом для трубки датчика являются, в основном, высококачественная и (или) нержавеющая сталь, титан, цирконий или тантал. Кроме того, практически любые другие материалы, обычно используемые или по меньшей мере подходящие, могут служить материалом для по меньшей мере одной трубки датчика.
Как уже было упомянуто, измерительный датчик 1 предлагается в основном для измерений высоких скоростей массопереноса в трубопроводах большого калибра. В силу этого, дальнейший вариант осуществления измерительного датчика 1 предусматривает, что по меньшей мере одна трубка 4 датчика имеет внутренний диаметр, достигающий по меньшей мере 80 мм. В основном по меньшей мере одна трубка 4 датчика реализована так, что ее внутренний диаметр превышает 100 мм или даже 110 мм. Более того, по меньшей мере одна трубка 4 датчика в другом варианте осуществления имеет такой размер, что длина ее превышает по меньшей мере 1000 мм. В таком случае, в особенности, измерительная трубка спроектирована так, что ее длина превышает 1500 мм. В соответствии с этим, по меньшей мере для случая, в котором по меньшей мере одна трубка 4 датчика сделана из стали, масса трубки 4 датчика достигает по меньшей мере 10 кг при обычной толщине стенок немного более 1 мм. В дальнейшем варианте осуществления изобретения по меньшей мере одна трубка датчика имеет такие размеры, что ее масса достигает более чем 25 кг, из-за сравнительно большой толщины стенок около 5 мм и (или) сравнительно большой длины около 2000 мм.
Кроме трубки 4 датчика далее возможно, как так же показано на фиг.5 и 6, предусмотреть вторую трубку 5 датчика в датчике измерений. Обычно трубка 5 практически идентична первой трубке 4 датчика и служит для транспортировки по меньшей мере части объема среды, подлежащей измерению. В дальнейшем варианте осуществления изобретения вторая трубка 5 датчика имеет по меньшей мере один изогнутый трубный сегмент 51. Две трубки датчика, особенно в случае, когда они проходят, по меньшей мере частично, параллельно друг другу, как показано на фиг.5, 9 и 11, и как показано, например, в патентах США US-B 6711958, US-A 5796011 и US-A 5301557, могут быть соединены вместе с помощью подходящих распределительных частей 11, 12 на входном и выходном концах для формирования потоков, текущих параллельно во время работы; они могут быть, однако, соединены последовательно, как показано, например, в US-A 6044715, для формирования путей потока, лежащих один за другим. Кроме того, также возможно, как, например, также предложено в US-B 6.666.098 или US-A 5.549.009, использовать только одну из двух трубок датчика в качестве измерительной трубки для транспортировки среды, и другую в качестве слепой трубки, не содержащей подлежащей измерению среды, текущей через нее, а вместо этого используемой для уменьшения внутреннего дисбаланса в измерительном датчике.
В требуемом случае, механические напряжения и (или) колебания, вызванные возможно или по меньшей мере потенциально корпусом датчика на входном и выходном концах вибрирующих трубок датчика, могут быть минимизированы, например, механическим соединением трубок датчика вместе, что является обычным в случае измерительных датчиков описанного типа, на входном конце посредством по меньшей мере первой узловой пластины 217 и на выходном конце посредством по меньшей мере второй узловой пластины 218. Кроме того, на механические собственные частоты двух трубок 4, 5 датчика и, таким образом, механические колебания внутренней колебательной системы, можно намеренно влиять с помощью узловых пластин 217, 218, через их размеры и (или) их положение.
Принимая во внимание то, что, как уже было упомянуто, каждая из трубок 4, 5 датчика весит намного больше 10 кг, и в этом случае, как очевидно без дальнейших размерных деталей, емкость сосуда может достигать 10 л или более, внутренняя колебательная система, включающая в себя две трубки 4, 5 датчика, может достигнуть общей массы выше 50 кг по меньшей мере в случае текущей через устройство среды высокой плотности. Главным образом, в случае использования трубок датчика со сравнительно большим внутренним диаметром, большой толщиной стенок и большой длиной труб, масса внутренней колебательной системы может достигать величин больше 70 кг или по меньшей мере вместе с текущей через устройство средой более 90 кг.
В случае показанного примера варианта осуществления, две трубки 4, 5 датчика возбуждаются электромеханическим возбуждающим механизмом 60, прикрепленным по меньшей мере частично к ним, для генерации колебаний консольного типа предпочтительно на мгновенной механической собственной частоте внутренней колебательной системы, сформированной двумя трубками 4, 5 датчика. В этом случае трубки 4, 5 датчика отклоняются в поперечном направлении от вышеупомянутой плоскости и начинают колебаться подобно камертону в противофазе одна другой. Иначе говоря, изогнутые трубочные сегменты 41, 51 колеблются в поперечном направлении подобно консоли, зажатой на одном конце. В приведенном примере варианта осуществления возбуждающий механизм 60 имеет для этой цели возбудитель колебаний, расположенный для каждой трубки 4, 5 датчика в области ее вершины приблизительно посредине трубы. Возбудитель колебаний может быть, например, возбудителем электродинамического типа, таким образом возбудитель колебаний реализуется с помощью соленоида 62, прикрепленного к трубке 5 датчика, и арматуры 61, соответственно прикрепленной к другой трубке 4 датчика, для движения в соленоиде 62.
Для регистрации колебаний трубки датчика и для выработки по меньшей мере одного сигнала измерения колебания, представляющего колебания трубки датчика, далее предусматривается, как было упомянуто выше, сенсорное средство, посредством которого колебания, особенно колебания на входном конце и выходном конце, изогнутого трубного сегмента 41 могут быть преобразованы в сигнал и посланы для дальнейшей электронной обработки. В приведенном примере варианта осуществления сенсорное средство имеет для этой цели первый датчик колебаний, расположенный на входном конце по меньшей мере одной трубки 4 датчика, и второй датчик колебаний, практически идентичный или равный по конструкции первому датчику колебаний и расположенный на выходном конце по меньшей мере одной трубки 5 датчика. Датчики колебаний могут также быть датчиками электродинамического типа, таким образом датчики колебаний реализуются в каждом случае посредством соленоидов 72, 82, прикрепленных к трубке 5 датчика, и арматуры 71, 81, соответственно прикрепленной к другой трубке 4 датчика для вдвигания в расположенный напротив соленоид. Кроме того, могут быть использованы другие датчики колебаний, известные специалистам в данной области техники, например оптоэлектронные датчики.
По меньшей мере одна трубка 4 датчика измерительного датчика, как видно из набора фиг.3а, 3b и 5 и как общепринято в случае измерительных датчиков такого типа, по существу полностью закрыта корпусом 10 датчика. Корпус 10 датчика служит не только для удержания трубок 4, 5 датчика, но также для защиты внутренних компонентов измерительного датчика 1, таких, например, как возбуждающий механизм и сенсорное средство, и компонентов измерительного датчика, помещенных в корпус датчика, от внешних влияний среды, таких, например, как пыль или водяные брызги. Кроме этого, корпус 10 датчика может дополнительно быть так реализован и иметь такие размеры, чтобы он мог сохранять утекающую среду настолько полно, насколько возможно, в пределах корпуса датчика, вплоть до требуемого максимального избыточного давления, в случае возможного повреждения по меньшей мере одной трубки 4 датчика, например, путем разлома или разрыва. Материалом корпуса датчика, особенно корпусной крышки 7, может быть, например, сталь, такая как конструкционная сталь или нержавеющая сталь, или также любой подходящий высокопрочный материал. В другом варианте осуществления измерительного датчика по меньшей мере одна трубка 4 датчика, особенно по меньшей мере частично изогнутая трубка, и корпус датчика сделаны из одного и того же материала, в основном стали высокого качества и (или) нержавеющей стали, или по меньшей мере материалов, подобных один другому, в основном из различных типов стали. Дополнительно предусматривается, что фланцы, как показано на фиг.3а, 3b и как это обычно принято в случае измерительных датчиков этого типа, формируются как неотъемлемые компоненты корпуса датчика, чтобы таким образом достичь минимально возможной установленной длины в сочетании с максимальной возможной стабильностью измерительного датчика; таким же образом возможно, что предусмотренные распределительные детали 11, 12 также могут быть прямо встроены в корпус датчика.
В первой реализации измерительного датчика корпус 10 датчика включает в себя несущий элемент 6, показанный здесь как поперечно по меньшей мере частично открытый несущий цилиндр, который, как показано на фиг.3 и 4, таким образом механически соединен с по меньшей мере одной трубкой датчика на входном и выходном концах, что по меньшей мере один изогнутый трубный сегмент 41 проходит в поперечном направлении наружу из несущего цилиндра. Кроме того, корпус датчика имеет корпусную крышку 7, расположенную на расстоянии по меньшей мере от одного изогнутого трубного сегмента трубки 4 датчика и прикрепленную к несущему элементу 6, в основном постоянно и (или) умеренно плотно, для размещения по меньшей мере одного изогнутого трубного сегмента по меньшей мере одной трубки 4 датчика. В случае примера варианта осуществления, представленного на фиг.3, трубка 4 датчика таким образом удерживается в трубчатом несущем элементе 6 на входном и выходном концах, что сегмент 41 колеблющейся трубки, проходящий через два выреза несущего элемента, проходит наружу в поперечном направлении и, следовательно, в корпусную крышку 7, также прикрепленную к несущему элементу 6. Следует также упомянуть здесь, в этой связи, что вместо, в основном, трубчатого несущего элемента 6, показанного на фиг.3 и 4, также, по требованию, может использоваться сплошной несущий цилиндр с другим подходящим поперечным сечением, например несущий элемент в форме балки.
В зависимости от того, какая форма и длина выбраны для по меньшей мере одной трубки 4 датчика, выбранный, в основном цилиндрический, несущий элемент имеет длину, практически равную или чуть более короткую, чем длина трубки датчика. Имея это в виду и учитывая вышеупомянутые размеры по меньшей мере одной трубки 4 датчика, несущий элемент в одном варианте осуществления измерительного датчика имеет длину по меньшей мере около 1000 мм. Предпочтительно реализовывать цилиндрические несущие элементы длиной более 1200 мм. Кроме того, несущий элемент, особенно в случае, если он изготовлен из стали, имеет массу по меньшей мере 70 кг. В дальнейшем варианте осуществления первой реализации измерительного датчика несущий элемент реализован так, что его масса достигает более 140 кг. В соответствии с этим измерительный датчик реализуется так, что массовое отношение общей массы внешней колебательной системы к общей массе внутренней колебательной системы меньше 3, а в основном меньше 2.
Корпусная крышка 7, используемая для размещения изогнутого трубного сегмента 41, включает в себя, как схематически показано на фиг.3, желобообразный сегмент 10с крышки, а также в основном плоский первый боковой сегмент 10а корпуса и второй боковой сегмент 10b корпуса, практически зеркально симметричный первому. Форма сегмента 10с крышки соответствует, как видно из фиг.3а и 3b, тороидальной раковине. В связи с этим, сегмент 10с крышки имеет практически дугообразную форму, предпочтительно полукруглую, поперечное сечение заранее заданного радиуса r и по меньшей мере виртуально по существу дугообразный первый край 10с сегмента с существенно большим радиусом R по сравнению с радиусом r, а также второй край 10с' сегмента, сформированный практически идентично первому краю сегмента. По требованию, как поперечное сечение, так и сегменты могут не быть идеально круглыми, а иметь слегка эллиптическую форму. Как понятно из набора фиг.1, 2 и 3, боковые сегменты 10а и 10b соединены через край сегмента 10а, 10b, имеющий форму круговой дуги, соответственно с первым и вторым краями 10с, 10с' сегмента 10с крышки, и, разумеется, таким образом, что боковые сегменты 10а, 10b корпуса расположены каждый в касательной плоскости к сегменту 10с крышки и, следовательно, ориентированы практически по касательной к связанному краю 10са, 10cb сегмента соответственно. Иначе говоря, между сегментом крышки и сегментами 10с, 10а корпуса и соответственно между сегментом крышки и сегментами 10с, 10b корпуса имеется в данном случае почти совершенно непрерывный и таким образом, насколько это возможно, гладкий переход, в котором, в случае допустимого внутреннего избыточного давления, не возникает никаких или почти никаких изгибающих напряжений. Кроме того, корпусная крышка прикрепляется к несущему элементу 6 через третий край 10с+ и четвертый край 10с# сегмента 10с крышки, а также в каждом случае через второй край 10а', 10b' первого и второго боковых сегментов 10а, 10b корпуса, и, разумеется, таким образом, что сегмент крышки и сегменты 10с, 10а, 10b корпуса остаются отделенными от по меньшей мере одного колеблющегося изогнутого трубного сегмента 41 во время работы. Для изготовления корпусной крышки 7 сегменты 10с, 10а, 10b в каждом случае предварительно изготавливаются отдельно и затем последовательно соединяются вместе, обычно путем сварки. Преимущественно, при изготовлении корпусной крышки 7 может использоваться также метод, описанный в уже упомянутой WO-A 03/021202 для изготовления металлической крышки, используемой для корпусной крышки 7, в котором она формируется сваркой двух практически идентично сформированных половинок крышки, главным образом половинок, вырезанных из плоского листа с отогнутым краем, особенно с отогнутым краем в форме четверти тора. Кроме того, корпусная крышка 7 может быть получена путем штамповки металлического листа подходящей толщины.
В варианте осуществления этой первой разновидности измерительного датчика, корпусная крышка 7 конструируется с такими размерами, что она, особенно при использовании стали в качестве материала корпуса, имеет массу по меньшей мере 10 кг, однако в основном больше 20 кг. Принимая во внимание, что несущий элемент может безусловно иметь массу 70 кг и более, ясно, что корпус датчика может достигать по меньшей мере 80 кг, особенно, однако, больше 160 кг. Однако для вышеупомянутого случая, где фланцы и (или) распределительные детали предусматриваются для внешней колебательной системы в датчике измерений и они являются частью внешней колебательной системы, соответственно должна вычисляться и приниматься во внимание большая масса при подгонке внешней колебательной системы к внутренней. Общая масса внешней колебательной системы может достигать по меньшей мере 200 кг или значительно большего значения. Особенно в случае использования трубок датчика с внутренним диаметром свыше 100 мм, можно ожидать массы, намного превышающей 300 кг.
В примере варианта осуществления первой разновидности измерительного датчика 1, приведенном здесь, как показано на фиг.4 и 6, терминалы несущей системы присоединены к несущему элементу 6 на входном и выходном концах. Эти терминалы должны обеспечить определенные точки соединения для возможной установки вспомогательных средств, таких как, например, подходящие кабели и ремни спускоподъемного оборудования, чтобы эффективнее предотвращать повреждение имеющего массу более 500 кг измерительного датчика, например, в результате неподходящего транспорта и (или) неправильного выбора точек соединения.
Во второй реализации измерительного датчика несущий элемент 6 корпуса 10 датчика предоставляется в форме несущей рамки, которая таким образом соединена механически по меньшей мере с одной трубкой 4 датчика на входном и выходном концах, что по меньшей мере один изогнутый трубный сегмент проходит в несущей рамке. Кроме того, корпус 10 датчика включает в себя, в случае этой разновидности измерительного датчика, первый корпусной сегмент, расположенный поперечно вдоль по меньшей мере одного изогнутого трубного сегмента 41 по меньшей мере одной трубки 4 датчика и присоединенный сбоку на несущей рамке, в основном постоянно и (или) умеренно плотно, а также второй корпусной сегмент, расположенный сбоку вдоль по меньшей мере одного изогнутого трубного сегмента по меньшей мере одной трубки датчика и присоединенный сбоку на несущей рамке, в основном постоянно и (или) умеренно плотно. Два корпусных сегмента в этом случае расположены напротив друг друга таким образом, что по меньшей мере один изогнутый трубный сегмент по меньшей мере одной трубки датчика проходит по меньшей мере частично между двумя корпусными сегментами.
Как понятно из набора фиг.5-7 и 9-11, как в случае примера варианта осуществления для первой разновидности измерительного датчика, так и в случае примера варианта осуществления второй разновидности измерительного датчика, несущий цилиндр или несущая рамка, в зависимости от обстоятельств, и два корпусных сегмента кроме того сформированы таким образом, и два корпусных сегмента, особенно два сегмента, имеющих практически плоскую форму, соединены сбоку к несущему цилиндру или несущей рамке таким образом, что они проходят, по меньшей мере частично, сбоку практически параллельно изогнутому трубному сегменту 41.
Как легко может быть выведено из приведенных объяснений, внутренняя колебательная система измерительного датчика 1, сформированная по меньшей мере одной трубкой 4 датчика, средой, транспортируемой, по меньшей мере мгновенно, в этой трубке, и по меньшей мере частично возбуждающим механизмом 60 и сенсорным средством 70, выполняет во время работы измерительного датчика 1 по меньшей мере время от времени механические колебания по меньшей мере с одной желательной частотой Fn, с механическими колебаниями, являющимися по меньшей времени время от времени и (или) по меньшей мере частично поперечными колебаниями, в основном изгибными колебаниями. Желательная частота Fn колебаний, в таком случае зависит в форме известной специалистам в данной области техники как от размера, формы и материала трубки 4 датчика, так и особенно от мгновенной плотности среды, и при этих ограничениях изменяется в процессе работы измерительного датчика в пределах заранее заданного желательного частотного диапазона ΔFn, показывающего нижнюю и верхнюю предельные частоты. В дальнейшем развитии измерительного датчика, во время работы предусматривается такой контроль и настройка мгновенной желательной частоты Fn колебаний внутренней колебательной системы, что она в основном соответствует мгновенной естественной собственной частоте внутренней колебательной системы.
Как уже указано выше, сам корпус 10 датчика имеет множество естественных режимов колебаний. Кроме того, как следует из приведенных выше объяснений, массовое отношение общей массы внешней колебательной системы к общей массе внутренней колебательной системы по меньшей мере при использовании сравнительно больших трубок датчика может быть по меньшей мере иногда значительно ниже, чем обсужденное выше критическое значение 4, в результате чего также собственные режимы внешней колебательной системы, особенно корпусных сегментов, могут быть установлены совсем близко к желательному частотному диапазону ΔFn или даже в его пределах для случая, в котором корпусу датчика в традиционной манере будет разрешено свободно колебаться. Для подавления или уничтожения по меньшей мере одного естественного режима помеховых колебаний корпуса датчика в измерительной трубке измерительный датчик 1 настоящего изобретения поэтому дополнительно имеет по меньшей мере первый опорный элемент 13а, прикрепленный в основном непосредственно к корпусу датчика и служащий для генерации в основном локально фиксированных режимов колебаний в корпусе датчика. Этот опорный элемент 13а принадлежит также внешней колебательной системе измерительного датчика. Следовательно, посредством по меньшей мере одного опорного элемента создается практически блокированный частотный диапазон ΔFs в противовес потенциально вредным частотам Fs внешней колебательной системы. По меньшей мере один опорный элемент 13а и корпус 10 датчика являются в таком случае, в основном, настолько подогнанными друг к другу, что блокированный частотный диапазон ΔFs имеет диапазон, который с по меньшей мере шириной полосы желательного частотного диапазона ΔFn, изначально откалиброванной как измерительный диапазон и заранее заданной, является по меньшей мере соответствующим и, если это возможно, даже несколько большим ширины полосы желательного частотного диапазона. Иначе говоря, в случае измерительного датчика по изобретению, может быть вполне приемлемым, что внешняя колебательная система измерительного датчика возможно также имеет по меньшей мере один режим колебаний с наименьшей естественной собственной частотой, которая меньше, чем заранее заданная нижняя предельная частота желательного частотного диапазона ΔFn.
Учитывая, что внутреннюю колебательную систему вынуждают во время работы колебаться на естественной собственной частоте, следует далее гарантировать, что она имеет по меньшей мере один режим колебаний с естественной собственной частотой, которая во время работы всегда выше, чем самая низкая естественная собственная частота внешней колебательной системы. Аналогично, внутренняя колебательная система имеет по меньшей мере один режим колебаний с естественной собственной частотой, которая во время работы всегда меньше, чем верхняя предельная частота желательного частотного диапазона ΔFn. В варианте осуществления измерительного датчика внешняя и внутренняя колебательная системы являются в таком случае настолько подогнанными друг к другу, что желательный частотный диапазон ΔFn внутренней колебательной системы и соответственно блокированный частотный диапазон ΔFs внешней колебательной системы имеют каждый полосу пропускания по меньшей мере 50 Гц. В дальнейшем варианте осуществления измерительного датчика нижняя предельная частота блокированного частотного диапазона поэтому выбирается по меньшей мере на 5% и (или) на 10 Гц меньше, чем заранее определенная нижняя предельная частота желательного частотного диапазона ΔFn. В результате, измерительный датчик по настоящему изобретению также подходит для измерения тех потоков сред, плотность которых во время работы измерительного датчика изменяется более чем на 20 кг/м3, что может случаться в случае потоков двухфазных или многофазных сред или также в случае прерывистых потоков сред.
В дальнейшем варианте осуществления измерительного датчика нижняя предельная частота желательного частотного диапазона ΔFn предпочтительно калибруется, и также устанавливается нижняя предельная частота блокированного частотного диапазона ΔFs для сред, имеющих плотность больше 400 кг/м3. Обычно нижняя предельная частота желательного частотного диапазона ΔFn в дальнейшем задается, и соответственно нижняя предельная частота блокированного частотного диапазона ΔFs выбирается таким образом, что она соответствует собственной частоте внутренней колебательной системы, когда среда с плотностью меньшей или равной 2000 кг/м3 течет по меньшей мере в одной трубке 4 датчика. В другом варианте осуществления измерительного датчика 1 верхняя предельная частота желательного частотного диапазона ΔFn выбирается для состояния, в котором плотность среды почти нулевая, то есть приблизительно равна плотности воздуха.
Здесь следует отметить, что желательная частота Fn колебания внутренней колебательной системы в случае измерительных датчиков описанного типа обычно зависит или по меньшей мере управляется как функция от мгновенной вязкости среды. Соответственно, в дальнейшем варианте осуществления верхняя предельная частота желательного частотного диапазона задается состоянием, в котором вязкость среды меньше 100·10-6 Па, т.е. приблизительно равна вязкости воздуха. Так как измерительный датчик в основном предлагается также для измерения масел, особенно нефти, нижняя предельная частота желательного частотного диапазона ΔFn заранее задается в следующем варианте осуществления для среды, вязкость которой больше чем 300·10-6 Па. Кроме того, нижняя предельная частота желательного частотного диапазона ΔFn в следующем варианте осуществления измерительного датчика задается для случая, когда вязкость среды меньше чем 3000·10-6 Па.
В варианте осуществления внешней колебательной системы измерительного датчика 1 корпус 10 датчика и по меньшей мере один опорный элемент 13а формируются и соединяются механически вместе таким образом, что внешняя колебательная система во время работы осуществляет самое большое по меньшей мере в желательном частотном диапазоне ΔFn только те нежелательные помеховые колебания, для которых мощность мгновенно рассеиваемых помеховых колебаний существенно меньше, чем мощность мгновенно рассеиваемых желательных колебаний внутренней колебательной системы на желательной частоте колебания. Например, среднее значение мощности всех мгновенно рассеиваемых помеховых колебаний в желательном частотном диапазоне ΔFn может рассматриваться как мощность помеховых колебаний. Для измерений высокой точности, требуемых на практике, будет преимуществом, если соответствующее отношение мощностей сигнал-шум для мощности желательных колебаний к мощности помеховых колебаний больше 5, однако, по меньшей мере больше 2. Например, среднее значение мощности всех мгновенно рассеиваемых помеховых колебаний в желательном частотном диапазоне ΔFn может служить мерой мощности помеховых колебаний. В качестве альтернативы или в дополнение, корпус 10 датчика и по меньшей мере один опорный элемент 13а формируются и соединяются механически вместе таким образом, что внешняя колебательная система во время работы по меньшей мере в желательном частотном диапазоне ΔFn не производит никаких или, самое большое, производит только такие нежелательные помеховые колебания, где максимальная амплитуда мгновенных помеховых колебаний внешнего колебательной системы значительно меньше максимальной амплитуды колебаний внутренней колебательной системы, особенно в самой трубке 4 датчика. В дополнение, корпус 10 датчика и по меньшей мере один опорный элемент 13а могут также быть так сформированы и соединены вместе, что мгновенный показатель качества помеховых колебаний, возможно созданных внешней колебательной системой, существенно меньше мгновенного показателя качества колебаний внутренней колебательной системы на желательной частоте ΔFn колебаний. В следующем варианте осуществления настоящего изобретения корпус 10 датчика и по меньшей мере один опорный элемент сформированы и механически соединены вместе таким образом, что отношение амплитуд сигнал/шум для мгновенной максимальной амплитуды колебаний внутренней колебательной системы к мгновенной максимальной амплитуде помеховых колебаний больше 1,5, в основном, однако, больше 2, и (или) отношение показателя качества сигнал/шум для показателя качества мгновенных желательных колебаний к показателю качества мгновенных помеховых колебаний достигает по меньшей мере 50, а в основном больше 80.
Для подавления по меньшей мере одного режима помеховых колебаний корпуса 10 датчика настолько эффективно, насколько это возможно, по меньшей мере один опорный элемент прикрепляется к нему по меньшей мере поточечно в области корпуса датчика, в которой такая форма колебаний имеет пучность колебаний, особенно локальной амплитуды колебаний, или по меньшей мере должна была иметь, если бы опорный элемент не был приложен к корпусу датчика. В случае показанного здесь примера варианта осуществления по меньшей мере один опорный элемент 13а внедрен в виде по меньшей мере одной сплошной пластины (например, также сделанной из стали), который, как очевидно из фиг.3а, 3b, 4-7, а также 9 и 10, соединен, в основном по меньшей мере частично с возможностью съема, с корпусом 10 датчика по меньшей мере в двух лежащих напротив друг друга местах 11а, 12а прикрепления. Предпочтительно по меньшей мере один опорный элемент 13а, кроме того, по меньшей мере поточечно, приварен и (или) припаян, особенно посредством тугоплавкого или твердого припоя, к корпусу 10 датчика. В качестве альтернативы или в дополнение к этому, по меньшей мере один опорный элемент 13а может иметь, по меньшей мере поточечно, винтовое соединение с корпусом 10 датчика, в основном с корпусными сегментами, расположенными сбоку от трубки 4 датчика.
В дальнейшем варианте осуществления измерительного датчика по меньшей мере один опорный элемент, соответственно, как очевидно из фиг.4-7, а также 9 и 10, может быть по меньшей мере частично прикреплен к корпусным сегментам 10 датчика сбоку от измерительной трубки с помощью болта, а также шайбы и (или) приварен к ним для удержания корпусного сегмента с небольшим зазором от опорного элемента, возможно со вставкой тарельчатых пружин и (или) демпфирующих шайб. Как также показано для примера на фиг.7, по меньшей мере один опорный элемент 13а может, кроме того, быть дополнительно прикреплен, по меньшей мере частично, к несущему элементу - в данном случае к несущему цилиндру, например, посредством сварки или пайки. Вместо такого соединения материалов или в дополнение к нему, конечно, могут использоваться винтовые соединения для прикрепления опорного элемента 13а к несущему элементу.
В дальнейшем развитии измерительного датчика по изобретению дополнительно предусматривается по меньшей мере первая вкладка 14а демпфирования колебаний корпуса 10 датчика, соединенная с корпусом датчика, в основном проходящая, по меньшей мере частично, между по меньшей мере первым опорным элементом демпфирования колебаний и корпусом датчика. Вкладка 14а может быть изготовлена, например, из пластика, резины, силикона или подобного материала, и может, например, иметь форму ленты или подстилки. В варианте осуществления этого следующего развития изобретения вкладка 14а таким образом формируется и таким образом располагается в датчике измерений, что она проходит, по меньшей мере частично, между по меньшей мере одним опорным элементом 13а и корпусом 10 датчика. Для описанного выше случая, в котором корпус датчика имеет несущий цилиндр 6, вкладка 14а может быть также в качестве альтернативы или в дополнение к предыдущему варианту осуществления таким образом расположена в датчике измерений, что она проходит по меньшей мере частично вдоль несущего цилиндра 6 и в таком случае также создает сплошной контакт. Кроме того, еще одна похожая вкладка 14b демпфирования колебаний может быть вставлена в измерительный датчик, располагаясь внутри корпуса датчика.
В другом дальнейшем развитии измерительного датчика дополнительно предусматривается по меньшей мере второй опорный элемент 13b, аналогичным образом прикрепленный к корпусу 10 датчика и служащий для формирования в основном локально фиксированных узлов колебаний в корпусе 10 датчика, с внешней колебательной системой измерительного датчика 1, включающей, в случае этого дальнейшего развития, по меньшей мере также второй опорный элемент 13b. В варианте осуществления этого дальнейшего развития измерительного датчика первый опорный элемент 13а и второй опорный элемент 13b, особенно второй опорный элемент 13b, аналогичным образом прикрепленный непосредственно к корпусу 10 датчика, сконструированы практически идентичными друг другу. Также, в случае этого дальнейшего развития измерительного датчика, первый опорный элемент 13а прикрепляется к корпусу 10 датчика, по меньшей мере частично, поблизости от первого датчика 71, 72 колебаний, а второй опорный элемент 13b, по меньшей мере частично, поблизости от второго датчика 81, 82 колебаний. В дополнительном варианте осуществления этого дальнейшего развития измерительного датчика он также включает в себя третий опорный элемент 13с, аналогично прикрепленный, в основном непосредственно, к корпусу датчика и аналогично служащий для формирования в основном локальных фиксированных узлов колебания в корпусе датчика, с внешней колебательной системой измерительного датчика, включающей в себя по меньшей мере также третий опорный элемент. Как очевидно из фиг.4, третий опорный элемент в случае примера варианта осуществления, приведенного здесь, по меньшей мере частично, прикреплен поблизости от возбудителя колебаний к корпусу 10 датчика, в данном случае к цилиндрическому несущему элементу 6.
Эксперименты показали, что уже посредством только небольшого числа опорных элементов блокируемый частотный диапазон может быть создан очень простым образом для внешней колебательной системы для того, чтобы обеспечить функционирование внутренней колебательной системы в желательном частотном диапазоне достаточно широкой полосы пропускания. Например, частотный спектр, показанный в качестве иллюстрации на фиг.8, был определен экспериментально для внешней колебательной системы измерительного датчика, построенного в соответствии с первой разновидностью с тремя опорными элементами. Совершенно ощутимо, что внешняя колебательная система практически не имеет естественных режимов колебания между приблизительно 210 Гц и намного выше 270 Гц, с желательным частотным диапазоном для того же измерительного датчика, лежащим, в свою очередь, между приблизительно 210 и 270 Гц. Кроме того, было обнаружено, что оба частотных диапазона блокированного частотного диапазона и его положения в частотном спектре могут быть легко отрегулированы для желательного частотного диапазона, ожидаемого в реальной работе измерительного датчика, путем небольших изменений в форме и (или) положении опорных элементов. Таким образом, за счет использования опорных элементов также возможно изготовлять измерительные датчики описанного типа экономически эффективно, даже при номинальных диаметрах 250 мм или выше, с одной стороны, с точностью измерений выше 99,8% и, с другой стороны, удерживать установленные размеры и установленную массу таких измерительных датчиков существенно в таких пределах, что, несмотря на большой номинальный диаметр, транспортировка, установка и функционирование могут осуществляться все еще в экономически рациональном режиме.
В корпусе (10) датчика, имеющем множество естественных режимов колебаний, с возможностью колебания под действием возбуждающего механизма (60) установлена по меньшей мере одна трубка (4) с сенсорным средством для выработки по меньшей мере одного сигнала измерения колебаний трубки, через которую протекает измеряемая среда. Для подавления по меньшей мере одного естественного режима колебания корпуса (10) к нему прикреплен по меньшей мере один опорный элемент (13а), служащий для формирования локальных фиксированных узлов колебаний в корпусе (10). Внешняя колебательная система датчика формируется корпусом датчика и по меньшей мере одним опорным элементом, а внутренняя колебательная система - по меньшей мере одной трубкой (4) датчика, измеряемой средой и по меньшей мере частично возбуждающим механизмом (60) и сенсорным средством (70). Внутренняя колебательная система во время работы измерительного датчика осуществляет механические колебания с по меньшей мере одной желательной частотой (Fn), которая зависит от размера, формы и материала трубки (4), а также от мгновенной плотности среды, и изменяется во время работы датчика в пределах заранее заданного диапазона (ΔFn) частот. Изобретение обеспечивает высокую точность измерений датчиками вибрационного типа с номинальными диаметрами свыше 150 мм, сохраняя уже установившиеся и проверенные формы конструкции. 54 з.п. ф-лы, 13 ил.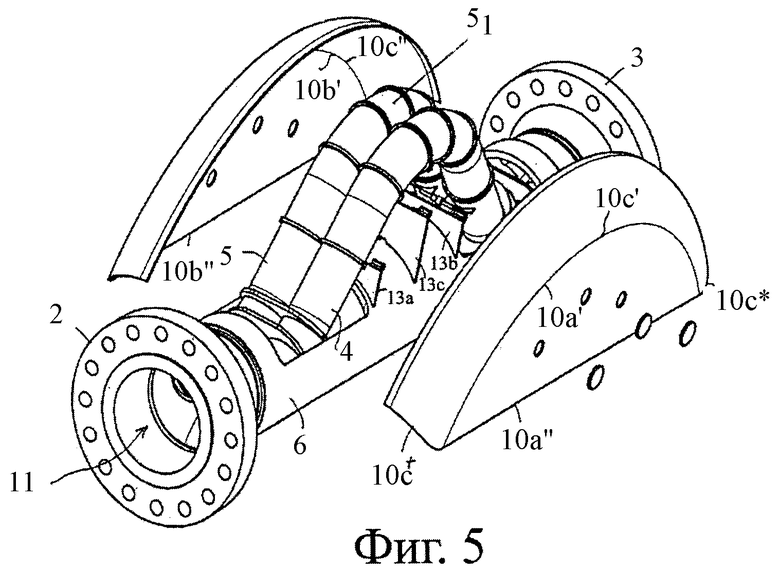
1. Измерительный датчик вибрационного типа для измерения текучей среды, транспортируемой в трубопроводе, особенно газа, жидкости, порошка или иного текучего вещества, содержащий:
корпус (10) датчика, который воспринимает множество естественных режимов колебаний;
по меньшей мере первую трубку (4) датчика для транспортировки по меньшей мере части объема подлежащей измерению среды, причем упомянутая трубка удерживается с возможностью колебаний в корпусе (10) датчика и вибрирует по меньшей мере время от времени;
электромеханический, предпочтительно электродинамический возбуждающий механизм (60), действующий в по меньшей мере одной трубке датчика для выработки и/или поддержания механических колебаний по меньшей мере одной трубки (4) датчика;
сенсорное средство, реагирующее на движения, особенно на изгибающие колебания трубки (4) датчика для выработки по меньшей мере одного сигнала (svb) измерения, представляющего колебания трубки датчика, а также
по меньшей мере первый опорный элемент (13а), прикрепленный, главным образом, непосредственно к корпусу (10) датчика и служащий для формирования практически локально фиксированных узлов колебаний в корпусе (10) датчика для подавления или уничтожения по меньшей мере одного естественного режима колебаний в корпусе (10) датчика;
при этом внешняя колебательная система измерительного датчика формируется корпусом датчика и по меньшей мере одним опорным элементом, а внутренняя колебательная система измерительного датчика формируется по меньшей мере одной трубкой (4) датчика, средой, по меньшей мере мгновенно транспортируемой в ней, и по меньшей мере частично возбуждающим механизмом и сенсорным средством (70); и
при этом внутренняя колебательная система, приводимая в действие возбуждающим механизмом (60), осуществляет, по меньшей мере время от времени, во время работы измерительного датчика механические колебания, главным образом в форме поперечных колебаний, имеющие по меньшей мере одну желательную частоту (Fn) колебаний, которая зависит от размера, формы и материала трубки (4) датчика, а также от мгновенной плотности среды, и которая во время работы измерительного датчика является переменной в заранее заданном желательном частотном диапазоне ΔFn, имеющем нижнюю и верхнюю предельные частоты.
2. Измерительный датчик по п.1, в котором корпус (10) датчика и по меньшей мере один опорный элемент (13а) так сформированы и так механически соединены друг с другом, что внешняя колебательная система измерительного датчика, по меньшей мере сформированная таким образом, несмотря на колебания трубки (4) датчика, не генерирует по меньшей мере в желательном частотном диапазоне ΔFn, нежелательных помех, или возможно генерирует только такие нежелательные помеховые колебания, мгновенно рассеиваемая помеховая мощность колебаний которых значительно меньше мощности желательных колебаний, мгновенно рассеиваемой на желательной частоте (Fn) колебаний колебаниями внутренней колебательной системы.
3. Измерительный датчик по п.2, в котором отношение мощности желательных колебаний к мощности помеховых колебаний по меньшей мере больше 2, главным образом, больше 5.
4. Измерительный датчик по п.2 или 3, в котором мощность помеховых колебаний соответствует в этом случае среднему значению мощностей всех колебаний, мгновенно рассеиваемых в желательном частотном диапазоне (ΔFn) колебаниями помех.
5. Измерительный датчик по п.1 или 2, в котором корпус (10) датчика и по меньшей мере один опорный элемент (13а) так сформированы и так механически соединены друг с другом, что внешняя колебательная система измерительного датчика, по меньшей мере сформированная таким образом, несмотря на колебания трубки (4) датчика, не генерирует по меньшей мере в желательном частотном диапазоне, нежелательных помех, или возможно генерирует только такие нежелательные помеховые колебания, мгновенная максимальная амплитуда помеховых колебаний которых значительно меньше мгновенной максимальной амплитуды колебаний для колебаний внутренней колебательной системы, особенно самой трубки (4) датчика.
6. Измерительный датчик по п.5, в котором отношение мгновенной максимальной амплитуды колебаний внутренней колебательной системы к мгновенной максимальной амплитуде помех больше 1,5, а главным образом больше 2.
7. Измерительный датчик по одному из пп.1-3, в котором корпус (10) датчика и по меньшей мере один опорный элемент (13а) так сформированы и так механически соединены друг с другом, что внешняя колебательная система измерительного датчика, по меньшей мере сформированная таким образом, несмотря на колебания трубки (4) датчика, не генерирует по меньшей мере в желательном частотном диапазоне (ΔFn), нежелательных помех, или возможно генерирует только такие нежелательные помеховые колебания, мгновенный показатель качества помеховых колебаний которых значительно меньше мгновенного показателя качества колебаний внутренней колебательной системы на желательной частоте Fn колебаний.
8. Измерительный датчик по п.7, в котором отношение показателя качества колебаний внутренней колебательной системы к показателю качества помеховых колебаний по меньшей мере равно 50:1, а главным образом больше 80.
9. Измерительный датчик по одному из пп.1-3, в котором корпус (10) датчика включает в себя, в основном стальной несущий элемент (6), с которым по меньшей мере одна трубка (4) датчика механически соединена на входном и выходном концах.
10. Измерительный датчик по п.9, в котором несущий элемент (6) корпуса (10) датчика реализован как в основном практически трубчатый несущий цилиндр, с которым по меньшей мере одна трубка (4) датчика механически соединяется на входном и выходном концах.
11. Измерительный датчик по п.10, в котором несущий элемент (6) имеет массу по меньшей мере 70 кг, а в основном более 140 кг, и (или) длину по меньшей мере 1000 мм, а в основном более 1200 мм.
12. Измерительный датчик по п.1, в котором по меньшей мере одна трубка (4) датчика имеет по меньшей мере один изогнутый трубный сегмент (41).
13. Измерительный датчик по п.12, в котором по меньшей мере одна трубка (4) датчика имеет по меньшей мере один трубный сегмент (41), изогнутый в U-образной или V-образной форме.
14. Измерительный датчик по п.12, в котором трубка (4) датчика включает в себя:
несущий элемент (6) цилиндрической формы, выполненный из стали, который механически соединен по меньшей мере с одной трубкой (4) датчика на ее входном и выходном концах, а также
корпусную крышку (7), установленную отделенной по меньшей мере от одной трубки (6) датчика и прикрепленную в основном постоянно и (или) умеренно плотно к несущему элементу (6) для размещения по меньшей мере одного изогнутого трубного сегмента трубки датчика.
15. Измерительный датчик по п.14, в котором несущий элемент (6) реализован как по меньшей мере частично открытый сбоку в основном трубчатый несущий цилиндр, таким образом соединенный по меньшей мере с одной трубкой (4) датчика, что по меньшей мере один изогнутый трубный сегмент (41) выступает вбок из несущего цилиндра.
16. Измерительный датчик по п.14 или 15,
в котором несущий цилиндр имеет массу по меньшей мере 70 кг, а в основном больше 140 кг; и (или)
в котором корпусная крышка имеет массу по меньшей мере 10 кг, а в основном больше 20 кг.
17. Измерительный датчик по п.14 или 15, в котором корпусная крышка (7) включает в себя корпусные сегменты (10а, 10b), расположенные сбоку рядом с по меньшей мере одним изогнутым трубным сегментом (41) по меньшей мере одной трубки (4) датчика, по существу, проходящие, по меньшей мере частично, практически параллельно изогнутому трубному сегменту (41) и имеющие практически плоскую форму.
18. Измерительный датчик по п.17, в котором по меньшей мере два корпусных сегмента (10а, 10b) расположены напротив друг друга таким образом, что по меньшей мере один изогнутый трубный сегмент (41) по меньшей мере одной трубки датчика идет, по меньшей мере частично, между двумя корпусными сегментами (10а, 10b).
19. Измерительный датчик по п.17, в котором корпусная крышка (7) включает в себя:
сегмент (10с) крышки в форме желоба
с первым краем сегмента (10с) в форме круговой дуги заранее заданного радиуса (R) и
со вторым краем (10с') сегмента, сформированным практически идентично первому краю (10с) сегмента,
при этом сегмент (10с) крышки имеет поперечное сечение в форме круговой дуги с радиусом (r), меньшим, чем радиус R края (10с) первого сегмента,
практически плоский первый боковой корпусной сегмент (10а),
который соединен с краем (10с) первого сегмента (10с) крышки через край (10а) первого сегмента в форме круговой дуги, а также
второй боковой корпусной сегмент (10b), который практически зеркально симметричен первому боковому корпусному сегменту (10а) и соединен с краем (10с') второго сегмента первого корпусного сегмента (10) через край (10b) в форме круговой дуги первого сегмента.
20. Измерительный датчик по п.19, в котором первый и второй боковые корпусные сегменты (10а, 10b) лежат каждый в касательной плоскости к сегменту (10с) крышки.
21. Измерительный датчик по одному из пп.14-15,
в котором по меньшей мере один опорный элемент (13а) прикреплен, по меньшей мере частично, к цилиндрическому несущему элементу (6); и (или)
в котором по меньшей мере один опорный элемент (13а) прикреплен, по меньшей мере частично, к корпусной крышке (7); и (или)
в котором по меньшей мере один опорный элемент, который прикреплен как к корпусной крышке (7), так и к цилиндрическому несущему элементу (6), по меньшей мере поточечно, в особенности, по меньшей мере частично, с возможностью съема, и (или), по меньшей мере поточечно, посредством скрепления материалов.
22. Измерительный датчик по п.12, в котором корпус датчика включает в себя:
несущую рамку, которая таким образом механически присоединяется к входному и выходному концам по меньшей мере одной трубки датчика, что по меньшей мере один изогнутый трубный сегмент проходит в несущей рамке,
первый корпусной сегмент, расположенный сбоку рядом по меньшей мере с одним изогнутым трубным сегментом, в основном идущий, по меньшей мере частично, практически параллельно изогнутому трубному сегменту и (или) имеющий в основном плоскую форму и прикрепленный в основном постоянно и умеренно плотно к несущей рамке, а также
второй корпусной сегмент, расположенный сбоку рядом по меньшей мере с одним изогнутым трубным сегментом трубы, в основном идущий, по меньшей мере частично, практически параллельно изогнутому трубному сегменту и (или) имеющий в основном плоскую форму и прикрепленный в основном постоянно или умеренно плотно к несущей рамке,
при этом два корпусных сегмента расположены напротив друг друга таким образом, что по меньшей мере один изогнутый трубный сегмент по меньшей мере одной трубки датчика проходит, по меньшей мере частично, между двумя корпусными сегментами.
23. Измерительный датчик по п.21,
в котором по меньшей мере один опорный элемент (13а) прикрепляется, по меньшей мере частично, к корпусным сегментам; и/или
в котором по меньшей мере один опорный элемент формируется посредством по меньшей мере одной сплошной пластины, которая соединяется с корпусом датчика в по меньшей мере двух взаимно противоположных положениях фиксации, особенно посредством болтов и/или по меньшей мере частично с возможностью съема.
24. Измерительный датчик по одному из пп.1-3, в котором по меньшей мере один опорный элемент (13а) имеет массу по меньшей мере 3 кг.
25. Измерительный датчик по п.24,
в котором по меньшей мере один опорный элемент (13а), по меньшей мере точечно, приварен и (или) припаян, в основном тугоплавким или твердым припоем, к корпусу (10) датчика; и (или)
в котором по меньшей мере один опорный элемент (13а), по меньшей мере частично, прикрепляется винтами к корпусу (10) датчика; и (или)
в котором по меньшей мере один опорный элемент (13а), по меньшей мере точечно, прикрепляется к корпусу (10) датчика в области пучности колебаний, особенно на амплитуде локальных колебаний, естественного режима колебаний корпуса (10) датчика.
26. Измерительный датчик по одному из пп.1-3, в котором дополнительно предусмотрена по меньшей мере одна вкладка (14а, 14b) демпфирования колебаний, соединенная с корпусом (10) датчика, в основном проходящая, по меньшей мере частично, между по меньшей мере одним опорным элементом (13а) и корпусом (10) датчика.
27. Измерительный датчик по п.26, в котором вкладка демпфирования колебаний сделана из пластмассы, резины, кремнийорганического соединения или тому подобного.
28. Измерительный датчик по одному из пп.1-3, в котором дополнительно предусмотрен второй опорный элемент (13b), таким же образом прикрепленный, в основном непосредственно, к корпусу (10) датчика, причем в основном второй опорный элемент практически идентичен первому опорному элементу (13а) для формирования в основном локально фиксированных узлов колебаний в корпусе (10) датчика, при этом внешняя колебательная система измерительного датчика также включает в себя по меньшей мере второй опорный элемент (13b).
29. Измерительный датчик по п.28,
в котором сенсорное средство (70) включает в себя первый датчик (71, 72) колебаний, главным образом, первый датчик колебаний расположен на входном конце по меньшей мере одной трубки (4) датчика, а также второй датчик (81, 82) колебаний, главным образом, второй датчик колебаний располагается на выходном конце по меньшей мере одной трубки (4) датчика, и
при этом первый опорный элемент (13а) прикрепляется к корпусу датчика, по меньшей мере частично, поблизости от первого датчика (71, 72) колебаний, и второй опорный элемент (13b) прикрепляется к корпусу датчика, по меньшей мере частично, поблизости от второго датчика (81, 82) колебаний.
30. Измерительный датчик по п.29, дополнительно содержащий третий опорный элемент (13с), таким же образом прикрепленный, в основном непосредственно, к корпусу (10) датчика для формирования в основном локально фиксированных узлов колебаний в корпусе (10) датчика, с внешней колебательной системой измерительного датчика, дополнительно включающей по меньшей мере также третий опорный элемент (13с).
31. Измерительный датчик по п.30,
в котором возбуждающий механизм (60) включает в себя по меньшей мере один возбудитель (61, 62) колебаний, в основном расположенный посредине по меньшей мере одной трубки датчика, и
при этом третий опорный элемент (13с), по меньшей мере частично, прикреплен к корпусу (10) датчика поблизости от возбудителя (61, 62) колебаний.
32. Измерительный датчик по одному из пп.1-3, в котором сенсорное средство (70) включает в себя первый датчик (71, 72) колебаний, главным образом, первый датчик колебаний расположен на по меньшей мере одной трубке (4) датчика на ее входном конце, а также второй датчик (81, 82) колебаний, главным образом, второй датчик колебаний расположен на по меньшей мере одной трубке (4) датчика на ее выходном конце.
33. Измерительный датчик по одному из пп.1-3, в котором возбуждающий механизм (60) включает в себя по меньшей мере один возбудитель (61, 62) колебаний, главным образом, возбудитель колебаний расположен посредине трубки (4) датчика.
34. Измерительный датчик по одному из пп.1-3, в котором дополнительно предусмотрен для соединения измерительного датчика к трубопроводу первый соединительный фланец (2) на входном конце и второй соединительный фланец (3) на выходном конце, при этом внешняя колебательная система измерительного датчика дополнительно включает в себя по меньшей мере первый и второй соединительные фланцы (2, 3).
35. Измерительный датчик по п.34, в котором каждый из двух соединительных фланцев (2, 3) имеет массу больше 50 кг, а, главным образом, больше 60 кг.
36. Измерительный датчик по п.1, в котором дополнительно предусмотрена вторая трубка (5) датчика, практически идентичная первой трубке (4) датчика и/или проходящая практически параллельно первой трубке (4) датчика.
37. Измерительный датчик по п.36, в котором дополнительно предусмотрена по меньшей мере одна первая узловая пластина, соединяющая вместе первую и вторую трубки (4, 5) датчика на их входных концах, и по меньшей мере одна вторая узловая пластина (218), соединяющая вместе первую и вторую трубки (4, 5) датчика на их выходных концах, при этом внутренняя колебательная система измерительного датчика дополнительно включает в себя по меньшей мере также первую и вторую узловую пластины (217 и 218).
38. Измерительный датчик по п.36 или 37, в котором дополнительно предусмотрена первая распределительная деталь (11), соединяющая вместе первую и вторую трубки (4, 5) датчика на их входных концах, а также вторая распределительная деталь (12), соединяющая вместе первую и вторую трубки (4, 5) датчика на их выходных концах, при этом внешняя колебательная система измерительного датчика дополнительно включает в себя по меньшей мере также первую и вторую распределительные детали (11 и 12).
39. Измерительный датчик по п.38, в котором каждая из двух распределительных деталей (11 и 12) имеет массу больше 10 кг, а, главным образом, больше 20 кг.
40. Измерительный датчик по п.1,
в котором мгновенная желательная частота (Fn) в основном соответствует мгновенной естественной собственной частоте внутренней колебательной системы; и (или)
в котором внешняя колебательная система измерительного датчика имеет по меньшей мере один режим колебаний с естественной собственной частотой, которая меньше, чем верхняя предельная частота желательного частотного диапазона (ΔFn), и больше, чем нижняя предельная частота желательного частотного диапазона (ΔFn); и (или)
в котором верхняя предельная частота желательного частотного диапазона (ΔFn) определяется для того условия, что плотность среды практически равна нулю, а в основном приблизительно равна плотности воздуха.
41. Измерительный датчик по одному из пп.1-3, в котором внешняя колебательная система измерительного датчика имеет по меньшей мере один режим колебаний, имеющий нижнюю естественную собственную частоту, которая меньше, чем нижняя предельная частота желательного частотного диапазона (ΔFn).
42. Измерительный датчик по п.41, в котором внутренняя колебательная система имеет по меньшей мере один режим колебаний с естественной собственной частотой, которая, во время работы, всегда больше нижней естественной собственной частоты внешней колебательной системы.
43. Измерительный датчик по одному из пп.1-3, в котором нижняя предельная частота желательного частотного диапазона (ΔFn) определяется для того условия, что плотность среды больше 400 кг/м3.
44. Измерительный датчик по п.43, в котором нижняя предельная частота желательного частотного диапазона (ΔFn) определяется для того условия, что плотность среды меньше чем 2000 кг/м3.
45. Измерительный датчик по п.1, в котором по меньшей мере одна желательная частота (Fn) колебания значительно зависит также от мгновенной вязкости среды.
46. Измерительный датчик по п.45, в котором верхняя предельная частота желательного частотного диапазона (ΔFn) определяется для того условия, что плотность среды меньше чем 100·10-6 Па, а в основном приблизительно равна плотности воздуха.
47. Измерительный датчик по п.45, в котором нижняя предельная частота желательного частотного диапазона (ΔFn) определяется для того условия, что плотность среды больше чем 300·10-6 Па.
48. Измерительный датчик по одному из пп.45-47, в котором нижняя предельная частота желательного частотного диапазона (ΔFn) определяется для того условия, что вязкость среды меньше чем 3000·10-6 Па.
49. Измерительный датчик по одному из пп.1-3, в котором желательный частотный диапазон (ΔFn) имеет ширину полосы по меньшей мере 20 Гц, а в основном больше 50 Гц.
50. Измерительный датчик по одному из пп.1-3,
в котором по меньшей мере одна трубка (4) датчика и корпус (10) датчика состоят из стали, в основном высококачественной и (или) нержавеющей стали; и/или
в котором корпус (10) датчика имеет минимальную толщину стенки меньше 6 мм.
51. Измерительный датчик по одному из пп.1-3,
в котором по меньшей мере одна трубка (4) датчика имеет массу по меньшей мере 10 кг, а в основном больше 25 кг; и (или)
в котором трубка (4) датчика имеет внутренний диаметр по меньшей мере 80 мм, а в основном больше 100 мм; и (или)
в котором трубка (4) датчика имеет длину по меньшей мере 1000 мм, а в основном больше 1500 мм; и (или)
в котором корпус (10) датчика имеет массу по меньшей мере 80 кг, а в основном больше 160 кг.
52. Измерительный датчик по п.1,
в котором общая масса внутренней колебательной системы достигает по меньшей мере 70 кг, а в основном, во время работы, по меньшей мере время от времени, больше 90 кг; и (или)
в котором общая масса внешней колебательной системы достигает по меньшей мере 200 кг, а в основном, во время работы, по меньшей мере время от времени, больше 300 кг; и (или)
в котором отношение установленной массы измерительного датчика к номинальному диаметру для установленной массы всего измерительного датчика, соответствующему калибру трубопровода, в который должен быть вставлен этот измерительный датчик, достигает по меньшей мере 1,5 кг/мм, а в основном больше 2 кг/мм; и(или)
в котором установленная масса всего измерительного датчика больше 200 кг, а в основном больше 400 кг.
53. Измерительный датчик по одному из пп.1-3, в котором массовое отношение общей массы внешней колебательной системы к общей массе внутренней колебательной системы, во время работы, по меньшей мере время от времени, меньше 3, а в основном меньше 2,5.
54. Измерительный датчик по одному из пп.1-3, в котором массовое отношение общей массы внешней колебательной системы к общей массе внутренней колебательной системы постоянно меньше 3.
55. Измерительный датчик по п.1, в котором предусмотрено измерение текучей среды, транспортируемой в трубопроводе, имеющем калибр больше чем 150 мм, а в основном больше чем 250 мм и выше, и/или измерение скорости массопереноса, текущей через трубопровод со скоростью, по меньшей мере время от времени, больше чем 900 т/ч, а в основном, по меньшей мере время от времени, больше чем 1200 т/ч.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| US 5705754 A, 06.01.1998 | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| УСТРОЙСТВО И СПОСОБ ИЗМЕРЕНИЯ МАССОВОГО РАСХОДА ПОТОКА ТЕКУЧЕЙ СРЕДЫ | 1988 |
|
RU2037782C1 |

