Изобретение относится к области неразрушающего контроля нефтегазопроводов (магистральных трубопроводов (МТ)) и может быть использовано для целей более надежной и точной дефектоскопии МТ за счет резервирования магниточувствительных датчиков дефектов. Оно также предназначено для целей дублирования оценки расстояния, производимой, как обычно, по измерениям колесных одометров, но также получаемой по информации от датчиков дефектов.
Известен бесконтактный измеритель расстояний [1], содержащий двухканальную проекционную систему с базовым расстоянием между объективами каналов. Устройство содержит осветительный канал для формирования зондирующей световой линии на поверхности объекта, двухкоординатные приборы с зарядовой связью или сокращенно - ПЗС-матрицы, расположенные на фиксированных расстояниях от объективов, по одному направлению, каждой из которых измеряются координаты точек объекта вдоль зондирующей световой линии, а по перпендикулярному направлению - параллаксы, и встроенный контроллер для выработки координат энергетических центров изображений на ПЗС-матрицах точек объекта, освещаемых световой линией, и для вычисления по значениям этих координат значений дальности до освещенных точек объекта.
Недостатком данного изобретения является то, что с его помощью могут быть определены только малые по величине расстояния. Кроме того, не производятся дефектоскопические измерения.
Известно устройство для путевого обследования внутренней поверхности трубопроводов [2]. Это устройство содержит электронные блоки, размещенные в герметичном контейнере, устройство перемещения контейнера по трубопроводу, датчики регистрации местонахождения, формирователь магнитного потока в исследуемом участке трубопровода, дополнительный измерительный контейнер, прозрачный со стороны, обращенной к стенке трубопровода, расположенный на держателе, шарнирно соединенном через подвижный рычаг с герметичным контейнером. В герметичном контейнере содержится источник света, оптически связанный через оптическое волокно с дополнительным герметичным контейнером, в котором последовательно по ходу светового пучка расположены поляризатор, полусферическая линза, оптическая система формирования изображения. Полусферическая линза расположена на прозрачной грани дополнительного герметичного контейнера с внутренней стороны. С наружной стороны прозрачной грани дополнительного контейнера расположена пленка магнитооптического материала с многослойным диэлектрическим покрытием. Пленка магнитооптического материала расположена на поверхности стенки трубопровода в области сформированного магнитного потока. Торец оптического волокна расположен в фокальной плоскости полусферической линзы, торец световодного жгута расположен в области изображения магнитооптического материала. Многослойное диэлектрическое покрытие на магнитооптическом материале выполнено из чередующихся четвертьволновых слоев диэлектрика с различным показателем преломления, свет освещает границы раздела слоев диэлектрика под углом Брюстера, поляризация излучения ориентирована в плоскости падения света. Устройство для путевого обследования внутренней поверхности трубопроводов позволяет обеспечить заданную надежность определения дефектных участков, которые могут привести к аварии трубопровода. Устройство не только определяет дефектный участок стенки трубопровода, но также позволяет получить изображение дефекта и пройденное расстояние.
Недостатком этого устройства является его сложность, а также то, что получаемые изображения дефектов имеют существенные размеры, они встречаются на поверхности внутренней стенки трубопровода редко и случайно, поэтому погрешность определения перемещения велика, и данное устройство напрямую для измерения пройденного внутритрубным снарядом-дефектоскопом (ВСД) расстояния использовать невозможно.
Известен одометр для внутритрубного снаряда-дефектоскопа [3], закрепленный на его герметичном контейнере, содержащий блок электроники, источник света, оптически связанный через оптическое волокно с системой формирования изображения, при этом блок электроники, источник света в виде светодиода инфракрасного диапазона излучения и система формирования изображения в виде волоконно-оптического жгута, двух его ответвителей и ПЗС-матрицы встроены герметично внутрь упругого полиуретанового основания, прикрепленного снаружи к герметичному контейнеру, на упругом основании закреплена пластинка-накладка из полиуретана, в соосное отверстие, выполненное в упругом основании и пластинке-накладке, герметично вставлен волоконно-оптический жгут, чувствительная площадка которого обращена к внутренней поверхности трубопровода и выполнена заподлицо с пластинкой-накладкой с возможностью плотного прилегания к стенке трубопровода, одна половина волокон жгута, выполненная в виде ответвителя, своим торцем через устройство оптического ввода света прижата к светодиоду инфракрасного диапазона излучения, а другая половина волокон, представляющая собой второй ответвитель волоконно-оптического жгута, своим торцем через другое устройство ввода света прижата к чувствительной площадке ПЗС-матрицы, в состав блока электроники введен контроллер ПЗС-матрицы для обработки информации по алгоритмам расчета расстояния, при этом светодиод инфракрасного диапазона излучения через транзистор-ключ соединен с управляющим выходом контроллера, к которому с помощью последовательного порта подключены управляющий вход и видеовыход ПЗС-матрицы.
Недостатком изобретения является повышение погрешности одометра при наличии жидкости, включений пыли, песка и других оптических помех.
Известен внутритрубный снаряд - дефектоскоп [4], т.е. устройство для определения дефектов в стальных стенках подземных трубопроводов, содержащий являющийся магнитопроводом цилиндрический герметичный контейнер, расположенные на нем в передней и задней частях полюсы постоянного магнита, между его полюсами щетки-магнитопроводы, проводники которых ориентированы в радиальных направлениях контейнера, опорные элементы в виде эластичных манжет с колесами, установленные за пределами полюсов магнита, концентрический, расположенный по окружности контейнера ряд ластов с пластинками-накладками, размещенных между полюсами постоянного магнита, в каждой из ласт вмонтирован герметично дефектоскопический датчик, предназначенный для измерения индукции магнитного поля трубопровода, с токоведущими проводниками, внутри контейнера размещен блок электроники, содержащий регистрирующую аппаратуру, а также блок источников электрического питания, в задней части контейнера размещены колесные одометры. Конструктивно одометр представляет собой колесо, установленное в рычаге, который, в свою очередь, установлен на кронштейне контейнера внутритрубного снаряда-дефектоскопа. В колесе снаряда установлен датчик с встроенным датчиком Холла и магнитный диск, который конструктивно выполнен из двух металлических дисков и шести магнитов, размещенных между дисками и залитых эпоксидным компаундом. Металлические диски совмещены таким образом, что внутренние зубцы одного диска входят в пазы другого с определенным зазором, создавая 25 магнитных пар. Датчик Холла неподвижно связан с осью колеса одометра, а диск - с вращающимся колесом. При вращении колеса одометра с магнитным диском в датчике вырабатываются импульсы, поступающие в электронный блок по проводам, размещенным в соединителе, и далее в герметичный разъем. Пружина в кронштейне имеет фиксатор, который предназначен для удержания одометра только в транспортном положении. Недостатком данного ВСД [4] является то, что при наличии на участках трубопровода пыли, песка, жидкости, твердых включений, волнистости трубопровода возникают вибрации ВСД, изменяется коэффициент трения между колесом и трубой, появляется проскальзывание, в силу чего понижается точность определения расстояния ВСД.
Известно "Устройство для определения расстояния, пройденного внутритрубным снарядом-дефектоскопом с одометрами" по патенту РФ №2316782 [5], которое предназначено как для определения расстояния, пройденного ВСД, так и для определения дефектов в стальных стенках трубопроводов с помощью набора магниточувствительных датчиков.
Сущность изобретения по патенту №2316782 состоит в том, что внутритрубный снаряд-дефектоскоп (ВСД) содержит являющийся магнитопроводом цилиндрический герметичный контейнер, расположенные на нем в передней и задней частях полюсы постоянного магнита, между этими полюсами - щетки-магнитопроводы, проводники которых ориентированы по радиальным направлениям цилиндрического контейнера, и опорные элементы в виде эластичных манжет с колесами, установленные за пределами полюсов магнита, расположенный по окружности цилиндрического контейнера концентрический ряд ластов с пластинками-накладками, размещенных между полюсами постоянного магнита, в каждом из ластов вмонтирован герметично дефектоскопический датчик, предназначенный для измерения индукции магнитного поля трубопровода, с токоведущими проводниками, внутри контейнера размещен блок электроники, содержащий регистрирующую аппаратуру, а также блок источников электрического питания, в задней части контейнера размещены колесные одометры, при этом введены матрицы магниточувствительных датчиков, микросборки их электроники, в состав блока электроники дополнительно введены мультиплексор, аналого-цифровой преобразователь, компьютер и флэш-память, при этом каждая матрица совмещена с соответствующим датчиком дефектов, вмонтирована в ласт, при этом каждый ласт выполнен из полиуретана, герметизирующего матрицу магниточувствительных датчиков совместно с микросборкой электроники, выходы каждого магниточувствительного датчика соединены через микросборку электроники с соответствующими входами мультиплексора, выходы которого через аналого-цифровой преобразователь соединены со входами компьютера, выходы компьютера, предназначенного для выработки информации по алгоритмам определения пройденного ВСД расстояния, соединены с входами флэш-памяти, предназначенной для записи информации в течение времени работы ВСД, а ее выходы являются выходами блока электроники и устройства в целом.
Данное устройство [5] принято за прототип.
Недостатком прототипа является сложность реализации, обусловленная большим количеством магниточувствительных матриц и, как следствие, значительным усложнением блока электроники, сложностью размещения указанных матриц на ластах с обеспечением прилегания их к поверхности трубопровода, возрастание трудоемкости обработки записанной информации. К тому же в ВСД не решаются задачи привязки дефектов к геодезическим координатам местоположения ВСД из-за отсутствия навигационной системы, вопросы снижения погрешностей из-за отсутствия датчиков температуры и давления.
Предлагаемое изобретение гораздо проще по схемному и конструкторскому решению, требует гораздо меньших затрат по обработке информации, решает задачу привязки дефектов к геодезическим координатам местоположения ВСД. Кроме того, в нем обеспечивается резервирование магнитометрических и одометрических записей информации и возможность снижения погрешности от температуры.
Технический результат изобретения состоит в применении однотипных магниточувствительных датчиков дефектов, например датчиков Холла, не предусматривающих использование матриц магниточувствительных элементов, во введении дифференцирующих устройств к выходам датчиков дефектов для повышения чувствительности получения информации, в размещении в каждом ласте двух одинаковых, расположенных в линию рядов этих датчиков на одном и том же расстоянии между рядами, во введении в состав ВСД интерфейса, трехкомпонентного измерителя угловой скорости, трехкомпонентного измерителя кажущегося ускорения с устройствами сопряжения с компьютером, датчика давления и датчика температуры.
Поставленная цель достигается тем, что внутритрубный снаряд-дефектоскоп с резервированными датчиками дефектов и одометрами содержит являющийся магнитопроводом цилиндрический герметичный контейнер, расположенные на нем в передней и задней частях полюсы постоянного магнита, к которым прикреплены щетки-магнитопроводы, проводники которых ориентированы по радиальным направлениям цилиндрического контейнера, и опорные элементы в виде эластичных манжет с колесами, установленные за пределами полюсов магнита, расположенный по окружности цилиндрического контейнера по крайней мере один пояс ластов с пластинками-накладками, размещенный между полюсами постоянного магнита, в задней части контейнера размещены одометры, в каждом из ластов герметично вмонтированы магниточувствительные датчики дефектов, предназначенные для измерения напряженности магнитного поля трубопровода, с токоведущими проводниками, внутри контейнера размещен блок источников электрического питания, в ластах также герметично размещены микросборки электроники магниточувствительных датчиков дефектов, при этом каждый магниточувствительный датчик дефектов соединен через микросборку электроники с первым блоком мультиплексоров и соответственно с первым блоком аналого-цифрового преобразователя, выходы первого блока аналого-цифрового преобразователя и выходы координатного процессора соединены с соответствующими входами центрального процессора, первая группа выходов которого соединена с входами контроллера управления записями на флэш-память, которая предназначена для записи информации в течение времени работы, а также для обеспечения съема выходной информации внутритрубного снаряда-дефектоскопа, а другая группа выходов центрального процессора связана с входами сетевого интерфейса, причем в состав внутритрубного снаряда-дефектоскопа введены трехкомпонентный гироскопический измеритель угловой скорости, трехкомпонентный измеритель кажущегося ускорения, датчики температуры и давления, при этом трехкомпонентный гироскопический измеритель угловой скорости, трехкомпонентный измеритель кажущегося ускорения, датчики температуры и давления, одометры соединены через второй блок мультиплексоров с соответствующими входами второго блока аналого-цифрового преобразователя, а выходы второго блока аналого-цифрового преобразователя соединены по шинам с соответствующими входами координатного процессора, в каждом ласте магниточувствительные датчики дефектов составляют, по меньшей мере, один ряд, а ласты объединены, по меньшей мере, в один круговой пояс.
При этом дополнительно введены ласты с образованием дополнительного кругового пояса ластов, который расположен на одинаковом расстоянии по всей своей протяженности от основного кругового пояса.
Микросборка электроники включает дифференцирующие устройства, входы которых соединены с выходами магниточувствительных датчиков дефектов, а выходы - с соответствующими дополнительными входами первого блока мультиплексоров.
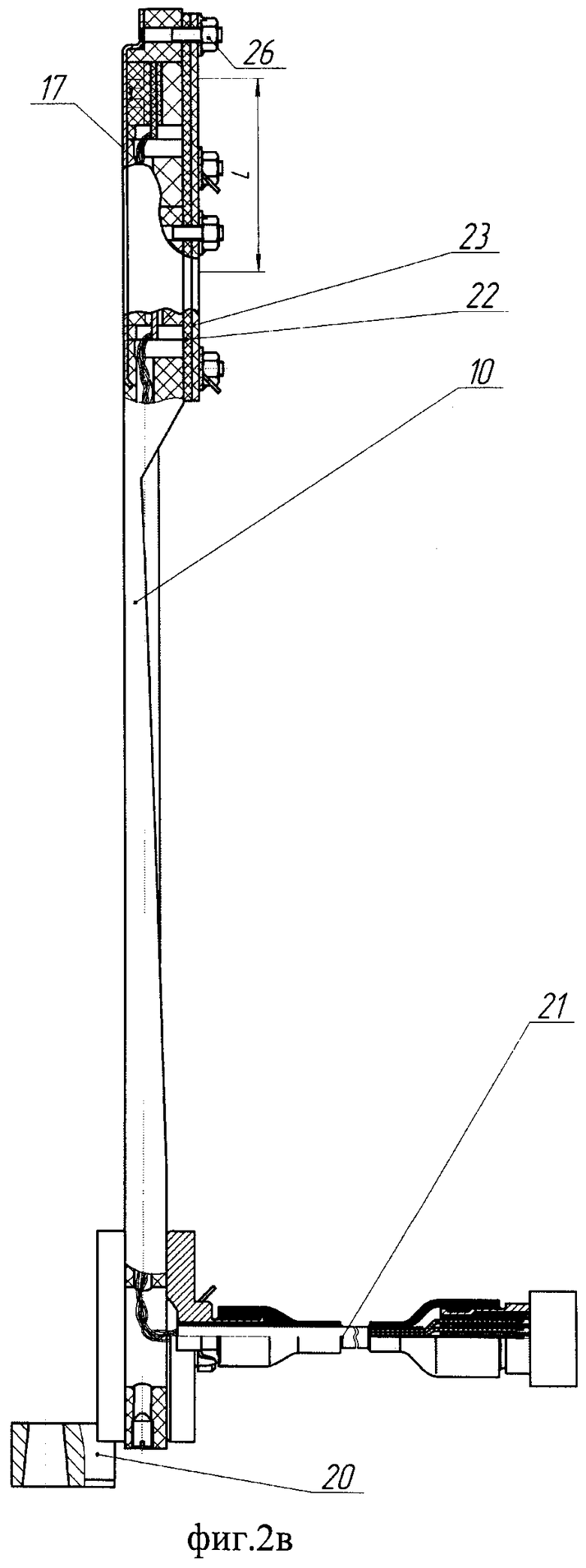
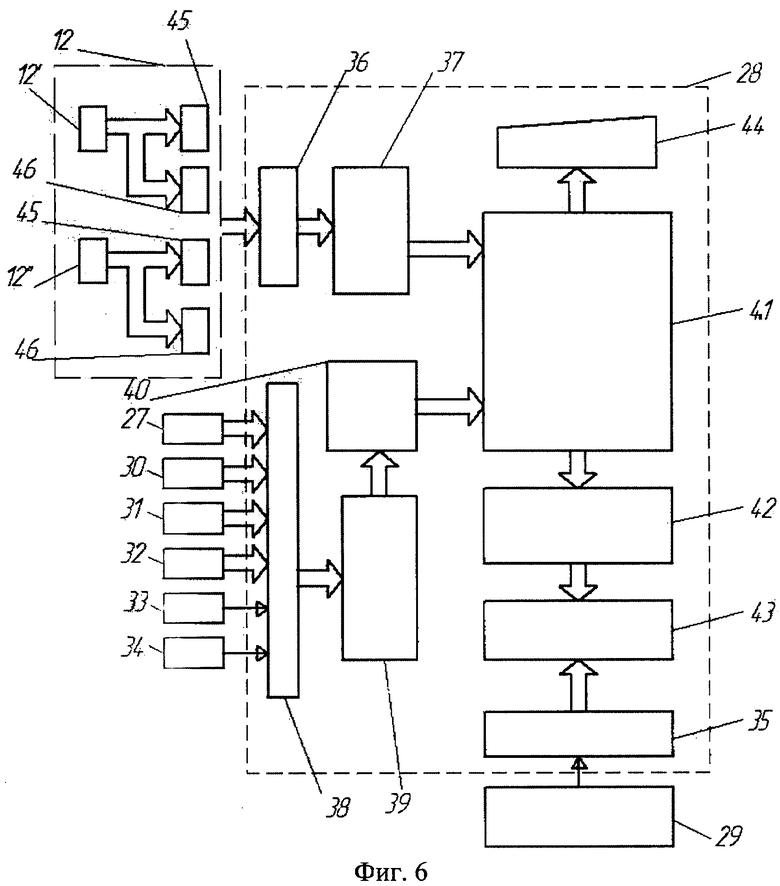
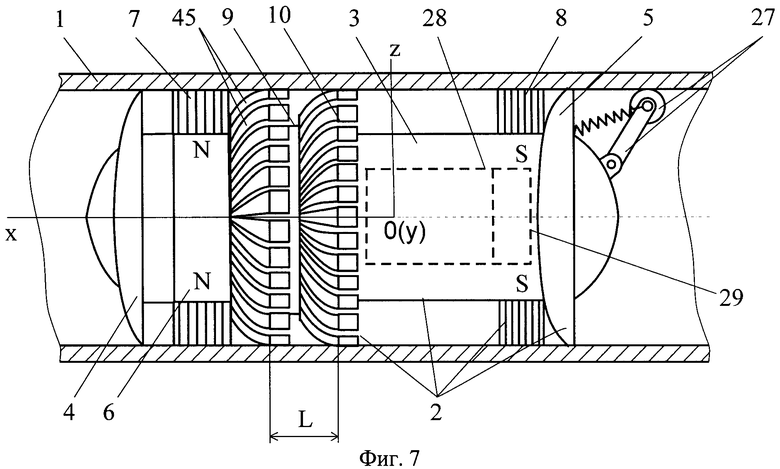
На фиг.1 изображен общий вид внутритрубного снаряда-дефектоскопа (ВСД); на фиг.2а и фиг.2в изображены две проекции конструктивной схемы сборки секции магниточувствительных датчиков дефектов (ласт); на фиг.3 изображена плата магниточувствительных датчиков дефектов; на фиг.4 представлена функциональная электрическая схема подключения магниточувствительного датчика дефекта непосредственно и через дифференцирующее устройство к первому мультиплексору; на фиг.5 - схема размещения магниточувствительных датчиков дефектов; на фиг.6 представлена функциональная электрическая схема ВСД; на фиг.7 изображен общий вид ВСД при втором варианте дублирования магниточувствительных датчиков дефектов; на фиг.8 и 9 изображены эпюры напряжений для магниточувствительного датчика дефекта и производной от этого напряжения.
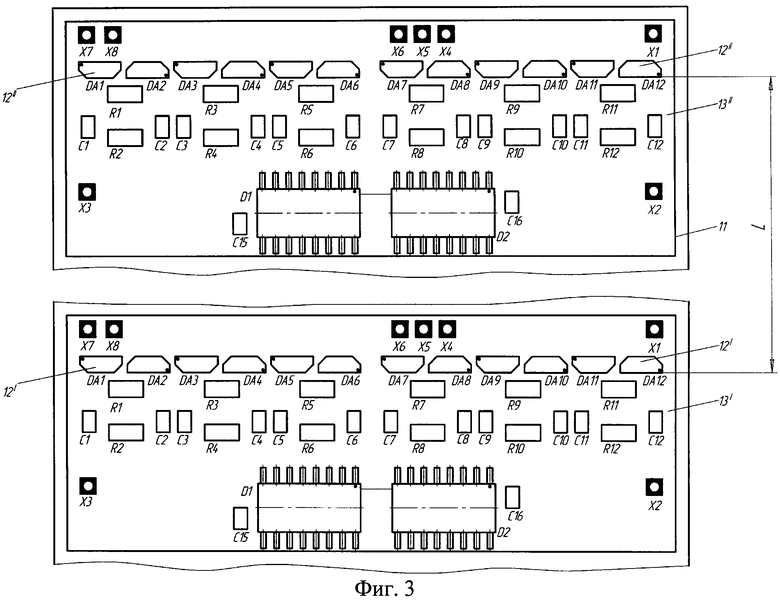
На фиг.1 позицией 1 обозначена часть ферромагнитного трубопровода. Позицией 2 изображен внутритрубный снаряд-дефектоскоп. В его состав входит герметичный контейнер 3 с эластичными манжетами 4 и 5 из полиуретана в передней и задней частях контейнера 3, выполненными для центрирования снаряда ВСД 2 в трубопроводе 1. На контейнере 3 закреплен постоянный магнит 6 с полюсами N и S, к которым прикреплены щетки-магнитопроводы 7 и 8 по радиальным направлениям. Утолщенная часть 9 контейнера 3 предназначена для крепления к ним сборок дефектоскопических датчиков 10, называемых ластами. Между полюсами N и S магнита 6 закреплен ряд сборок дефектоскопических датчиков 10 (ластов), предназначенных для измерения напряженностей магнитного поля, каждый из которых представляет собой полиуретановую пружинящую пластину 11 (фиг.3), в которой закреплены два ряда магниточувствительных датчиков 12I и 12II для измерения индукции (напряженности) магнитного поля. Наличие постоянного магнита 6 и двух рядов магниточувствительных датчиков 12I и 12II магнитного поля свидетельствуют о том, что ВСД 2 является коррозионным снарядом, определяющим изменение толщины, нарушение целостности материала, наличие вмятин и прочих дефектов в стенках трубы, а также предназначено для использования в устройстве для определения пройденного ВСД расстояния, о чем будет сказано ниже.
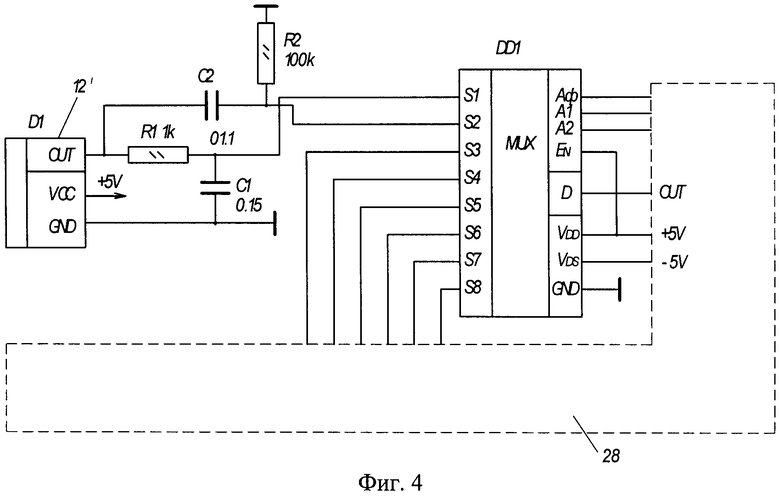
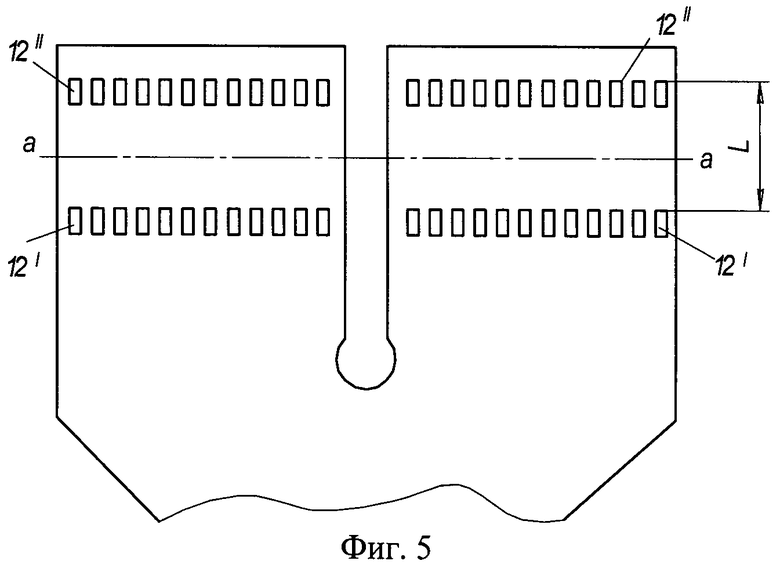
Для этой цели параллельно первому ряду магниточувствительных датчиков 12I, применяемых в прототипе, расположен след в след дополнительный второй ряд аналогичных магниточувствительных датчиков 12II на одинаковом расстоянии между рядами L=3…6 см. Это расстояние должно строго выполняться для всех пар датчиков из рядов 12I и 12II. При этом измерительные оси всех датчиков расположены вдоль соответствующих осей, параллельных продольной оси цилиндрического контейнера 3. Ряд магниточувствительных датчиков 12I вмонтирован в плату 13I, а ряд 12II вмонтирован в плату 13II (на фиг.2 для левой половины ласта они обозначены как 16I и 16II). В свою очередь, платы 13I и 13II закреплены на правой части 14 ласта 10 и герметично залиты полиуретаном. Аналогично на левой части 15 ласта 10 закреплены и герметично залиты полиуретаном платы 16I и 16II, аналогичные указанным выше платам 13I и 13II. Платы 13I, 13II, 16I, 16II герметично закрыты со стороны прилегания к трубопроводу 1 пластинками-накладками 17 из полиуретана. Отверстия 18 являются началом паза 19 между правой и левой частями конца ласта 10, обеспечивающие их лучшее прилегание к поверхности трубопровода 1, а также через это отверстие осуществляют крепление стяжки, притягивающей ласт к поверхности контейнера 9 и удерживающей его на определенном расстоянии для обеспечения запасовки в трубопровод 1. Отметим, что в выпускаемых ВСД в качестве магниточувствительных датчиков поз.12 часто применяются датчики Холла SS495A [7, 8], габаритные размеры каждого из датчиков видны на фиг.3, где их изображено 32 штуки. Из фиг.3 видно, что расстояние между двумя рядами датчиков (12I и 12II) составляет L=58 мм. На фиг.2 изображены: позициями 20 - фланец, 21 - соединитель, 22 - прокладка, 23 - крышка, 24, 25 - планки крепления узлов датчиков, 26 - винт с гайкой. Позицией 27 (фиг.1) обозначен колесный одометр, позицией 28 - блок электроники, размещенный в герметичном контейнере 9, позицией 29 - блок источников электрического питания ВСД (батарея аккумуляторов). На фиг.4 изображена функциональная электрическая схема типового подключения отдельного датчика Холла SS495A к блоку электроники 28, предназначенного для обработки, регистрации и хранения записанной информации. Из схемы фиг.4 следует, что датчик 12I, обозначенный D1 подключен к источнику напряжения питания +5V (точка GND - заземление (корпус)). Клемма выходного напряжения (OUT) через резистор R1, и после подключенного параллельно к выходу резистора R1 конденсатора С1 (ячейка R1-C1 - интегрирующее устройство 45 на фиг.6), соединена с входом S1 микросхемы DD1 марки ADG608BR [6], представляющей собой мультиплексор, последовательно подключающий выходы датчиков к входу аналого-цифрового преобразователя. К клемме OUT магниточувствительного датчика дефектов подключен первая обкладка конденсатора С2 (на фиг.6 - вход дифференцирующего устройства 46), вторая обкладка соединена с входом S2 мультиплексора DD1 и с первым концом резистора R2, второй конец которого соединен с корпусом GND. Вход S1 является входом по сигналу измерения напряженности магнитного поля трубопровода 1, а вход S2 - входом по скорости изменения этой напряженности. В связи с удвоением по отношению к прототипу числа магниточувствительных датчиков дефектов и введения ячейки R2-C2 (на фиг.6 дифференцирующее устройство 46) возрастает количество схем подключения, количество мультиплексоров и других элементов блока электроники, а также производится при необходимости смена вычислителей и других элементов по быстродействию, памяти, энергопотреблению, количествам входов-выходов и другим параметрам. На фиг.5 изображена схема размещения двух рядов - одного основного 12I из 32 магниточувствительных датчиков и одного дополнительного из 32 магниточувствительных датчиков дефектов 12II по 16 в каждой половинке ряда на каждой половинке ласта. Ласты с размещением датчиков типа, изображенных на фиг.5, составляют 3/4 или 7/8 части от общего количества ластов, например 32. Ласты распределены по окружности равномерно и предназначены для определения расстояния, пройденного ВСД вдоль продольной оси ОХ. В ряде конструкций ВСД часть ластов для снижения объемов и числа проводов записываемой информации может быть снята равномерно по окружности.
На фиг.6 изображена функциональная электрическая схема ВСД. На ней представлены соединения блоков, приборов и узлов ВСД с блоком электроники 28. Внешние датчики и приборы обозначены позициями: 12 - набор магниточувствительных датчиков дефектов основного 12′ и дополнительного 12′′ рядов с микросборкой электроники, состоящей из интегрирующих 45 и дифференцирующих 46 устройств; 27 - одометры; 29 - блок источников питания (аккумуляторов); 30 - датчик крена; 31 - трехкомпонентный гироскопический измеритель угловой скорости (ТГИУС); 32 - трехкомпонентный измеритель кажущегося ускорения (ТИКУ, блоки 31 и 32 входят в состав навигационной системы); 33 - датчик температуры, одно из его назначений - применение для учета температурных погрешностей блоков 31, 32 и других; 34 - датчик давления. С блоком аккумуляторов 29 соединен блок питания 35, например НЕ-104, вырабатывающий различные питающие напряжения (±5V; ±12V и т.д.) и соединенный со всеми потребителями как блока электроники 28, так и с внешними потребителями 12…34. В ВСД установлены сотни магниточувствительных датчиков дефектов 12, поэтому они соединены с отдельным, первым блоком мультиплексоров 36 и соответственно с первым блоком АЦП 37. Утолщенными стрелками показаны множества электрических проводников (проводов), одной стрелкой - один (второй - корпус) или два проводника. Выходы датчиков 27…34 через второй блок мультиплексоров 38 соединены с соответствующими входами второго блока АЦП 39, выходы которого соединены по шинам с соответствующими входами координатного процессора 40, выполненного, например, на основе PIC-контроллера. Выходы первого АЦП 37 и выходы координатного процессора 40 соединены с соответствующими входами центрального процессора 41, первая группа выходов которого соединена со входами контроллера 42, выполненного, например, на PCMCIA FLASH, управления записями на флэш-память 43, например, марки PCMCIA FLASH - диск SDP3. Другая группа выходов центрального процессора 41 связана со входами сетевого интерфейса 44, например, марки РСМ - 3660 (Advantech), предназначенного для считывания информации с БВСД.
Описанное выше техническое решение, когда в один ласт монтируются два ряда датчиков дефектов 12 с фиксированным расстоянием L между ними, бывает не всегда оправданным. Это может относиться к ВСД больших диаметров 103 - 1,4·103 мм - в них ласты имеют значительные размеры, в силу чего раздвоенная часть ласта недостаточно хорошо прилегает к поверхности трубопровода 1. Конкретнее, не вся поверхность ласта прижата к трубе, в первую очередь, это относится к верхней части ласта с дополнительными рядами 12II датчиков дефектов. В связи с этим имеет смысл иногда отказаться от одного кругового пояса ластов и применять два пояса, иногда можно применять двухрядные конструкции ластов с датчиками дефектов, а иногда применять ласты с однорядным расположением датчиков дефектов. В этом случае можно применять традиционные конструкции ластов [6]. Такой вариант можно использовать и в других ВСД, где есть возможность разместить два ряда ластов. В этом случае для создания базы "L" предлагается применить конструкцию ВСД с двумя рядами ластов, что отображено на фиг.7. Все позиции на фиг.7 совпадают с соответствующими позициями фиг.1 за исключением дополнительного ряда ластов 45 с датчиками дефектов. Это значит, что все элементы конструкции, приборы, блоки и узлы ВСД совпадают с таковыми по фиг.1. Отличия составляют дополнительный ряд ластов 45, конструкция ласта и количественный состав датчиков дефектов. Кроме того, база L по фиг.7 больше базы L по фиг.3. Конструкция ласта, применяемого в ВСД по фиг.7, описана в [6] и получается из конструкции по фиг.2, если из нее удалить верхнюю часть от линии аа. Аналогичная мера относится к схеме фиг.5. Схема фиг.7, в первую очередь схема блока электроники, останется неизменной.
Работает ВСД следующим образом. После запасовки снаряда в трубопровод 1 и подключения питающих напряжений от блока источников электрического питания 29 ко всем дефектоскопическим датчикам ряда 12, к колесному одометру 27, блоку электроники 28, а также к другим электроэлементам, ВСД готов к работе. При подаче в трубопровод газа или нефтепродукта за счет разности давлений на манжетах 4 и 5 возникает движущая сила, которая толкает ВСД 2 и заставляет его перемещаться по трубопроводу. При этом за счет упругости ластов 10 датчики дефектов 12 прижимаются к поверхности трубопровода 1. Непосредственного контакта не происходит из-за наличия пластинок-накладок 17. Пластинки-накладки 17 обеспечивают сохранность магниточувствительных датчиков дефектов 12 и других элементов, вмонтированных в ласт 10, обеспечивая работоспособность в различных средах. С помощью фланца 19 и соединителя 21 ласт 10 надежно удерживается на ВСД 2 во всех эксплуатационных условиях. При неподвижном, а затем движущемся ВСД 2 за счет полюсов N - S магнита 6 через щетки-магнитопроводы 7 и 8 создаются замкнутые линии магнитной напряженности и производится намагничивание трубопровода 1. За счет наличия неровностей в виде отверстий, выступов, швов, коррозии и т.д. различные участки трубы имеют разную напряженность магнитных полей, так что каждый магниточувствительный датчик дефектов 12 преобразует изменяющиеся локальные напряженности магнитных полей в пропорциональные электрические напряжения вдоль продольной (ОХ) оси, для каждой из ласт, равные

где  - коэффициенты передачи i-го датчика дефекта, где i - номер датчика дефекта;
- коэффициенты передачи i-го датчика дефекта, где i - номер датчика дефекта;  - мгновенные значения локальных магнитных напряженностей вдоль оси ОХ;
- мгновенные значения локальных магнитных напряженностей вдоль оси ОХ;  - напряжения в первом (j=I) и втором (j=II) рядах i-x датчиков; n - количество датчиков дефектов в ряду; j - номер ряда датчиков.
- напряжения в первом (j=I) и втором (j=II) рядах i-x датчиков; n - количество датчиков дефектов в ряду; j - номер ряда датчиков.
Напряжения  поступает на входы S1 (фиг.4) мультиплексоров DDL. Напряжения по скоростям изменения локальных магнитных напряженностей поступает на входы S2 этих же мультиплексоров. Так как сила тока
поступает на входы S1 (фиг.4) мультиплексоров DDL. Напряжения по скоростям изменения локальных магнитных напряженностей поступает на входы S2 этих же мультиплексоров. Так как сила тока  через резистор R2 при пренебрежении выходным сопротивлением датчика Холла определяется уравнением
через резистор R2 при пренебрежении выходным сопротивлением датчика Холла определяется уравнением

то напряжение, снимаемое с резистора R2 и поступающее на вход S2 мультиплексора DD1, будет определяться дифференциальным уравнением


где Kij,  - коэффициент передачи и постоянная времени, причем Kij вводится для повышения чувствительности в координатном процессоре.
- коэффициент передачи и постоянная времени, причем Kij вводится для повышения чувствительности в координатном процессоре.
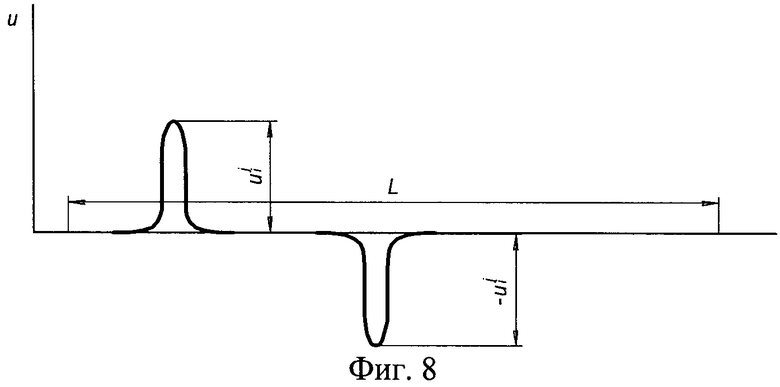
Отсюда следует, что дифференцирующее устройство является фильтрующим с постоянной времени  , которая должна подбираться по уровню и частотному диапазону шумов с целью их эффективного ослабления на фоне полезного сигнала. Организуются в процессе наблюдения за прохождением дефекта в виде (фиг.8). Фиксируются напряжения
, которая должна подбираться по уровню и частотному диапазону шумов с целью их эффективного ослабления на фоне полезного сигнала. Организуются в процессе наблюдения за прохождением дефекта в виде (фиг.8). Фиксируются напряжения

где Uпор, Uc - пороговое значение и среднее значение сигнала соответствующего датчика дефекта. Обычно  от среднего магнитного поля велико, а сигнал от дефекта приводит к изменению его значения на десятые доли - единицы процента. Поэтому для повышения чувствительности и достоверности измерений наряду с наблюдением напряжений
от среднего магнитного поля велико, а сигнал от дефекта приводит к изменению его значения на десятые доли - единицы процента. Поэтому для повышения чувствительности и достоверности измерений наряду с наблюдением напряжений  нужно наблюдать за производными
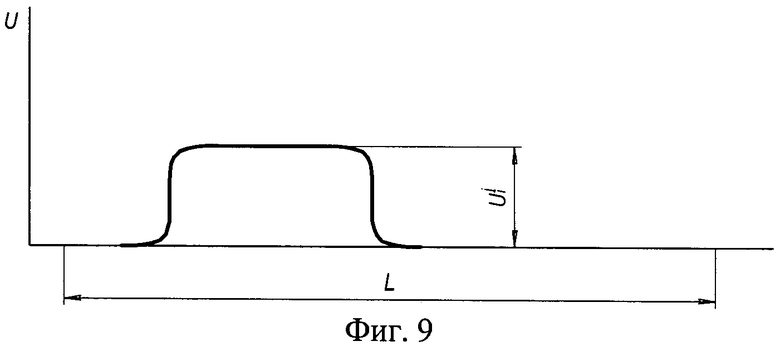
нужно наблюдать за производными  от напряжений : в них постоянная составляющая отсутствует, поэтому нужно оценивать выполнение неравенств (фиг.9)
от напряжений : в них постоянная составляющая отсутствует, поэтому нужно оценивать выполнение неравенств (фиг.9)

где uпор - пороговое значение производной от напряжения  . Чередование знаков
. Чередование знаков  покажет, был ли подъем в напряженности
покажет, был ли подъем в напряженности  или спад. Записываются сигналы в соответствии с условием (6).
или спад. Записываются сигналы в соответствии с условием (6).
Выполнение условий (5) и (6) позволяет снизить объем записываемой информации. Для каждой пары датчиков, расположенных в разных рядах, т.е. 12i I и 12i II (i=1, …, n), записываются напряжения, удовлетворяющие условиям (5) и (6), и для каждого этого дефекта фиксируются моменты времени с высокой точностью.
По сигналам датчиков дефектов второго ряда 12i II и первого ряда 12i I изображаются, как обычно, при постобработке информации развертки внутренней поверхности трубопровода 1 на всей дистанции от камеры запуска до камеры выемки с дефектами трубопровода. По нанесенным одновременным меткам времени определяются расстояния между началами и концами одновременных дефектов между рядами I и II датчиков на базе L. Определяют в компьютере время и скорость прохождения дефектом базы L. Расположение дефектов носит случайный характер, но в силу их достаточно большого количества (300…700 магниточувствительных датчиков дефектов на окружности) с помощью блока логики компьютера будут определяться как приращения пройденного расстояния, так и в целом расстояние ВСД. В процессоре 41 по разностям времени прохождения начал (концов) дефектов определяется скорость ВСД. Результаты приращений расстояний многих датчиков для одноименных промежутков времени осредняют, чем повышают точность измерений. При отсутствии идентифицируемых дефектов в течение некоторого промежутка времени замеряют его и по нему экстраполируют расстояние, используя значение скорости ВСД на предыдущем участке. При постобработке информации от сигналов магниточувствительных датчиков дефектов, бортового таймера и одометров фиксируют моменты времени прохождения, дистанции и геометрические параметры дефектных мест трубопровода. При этом с помощью информации, полученной от введенных в состав ВСД трехкомпонентного гироскопического измерителя угловой скорости, позиция 31, трехкомпонентного измерителя кажущегося ускорения, позиция 32, датчиков температуры и датчиков давления, определяют в компьютере по навигационным алгоритмам геодезические координаты ВСД на всей трассе трубопровода, корректируя их в реперных точках по сигналам GPS для повышения точности измерений. Тем самым производят определение геодезических координат дефектов, а по датчику крена 30 определяют его угловое положение на трубопроводе 1 с более высокой точностью и надежностью.
Технико-экономический эффект состоит в повышении надежности, точности и расширения дефектоскопической информации о состоянии стенок МТ за счет дополнительных датчиков дефектов, за счет получения от них дублированной и более точной информации о пройденном расстоянии ВСД, об обеспечении комплексирования этой информации с информацией от одометров, привязки дефектов к геодезическим координатам. При этом ВСД будет дешевле прототипа из-за использования освоенных производством датчиков дефектов и электроники.
Источники информации
1. Патент РФ №2124700, МПК G01B 11/00, 11/02. Авторы Ю.Е.Дукаревич и Е.Ю.Дукаревич. Бесконтактный измеритель расстояний. 1999 г.
2. Патент РФ №2156917, МПК F17D 5/02. Устройство для путевого обследования внутренней поверхности трубопроводов. 2000 г.
3. Патент РФ №2275598, Б. №12, 2006. Одометр для внутритрубного снаряда-дефектоскопа. Авторы А.И.Синев, Ю.В.Чеботаревский, П.К.Плотников, В.Б.Никишин, Ю.А.Захаров.
4. А.С. СССР №246667 от 1969. "Устройство для нахождения дефектов в стенке подземного трубопровода". Авторы Бондаренко П.М. и др.
5. Патент РФ №2316782, Бюл. №4, 2008. Устройство для определения расстояния, пройденного внутритрубным снарядом-дефектоскопом. Авторы А.И., Синев, П.К. Плотников, В.Б. Никишин и др.
6. Снаряд-дефектоскоп «Крот М 1400». Техническое описание и инструкция по эксплуатации. РНКШ 1400.00:00.00.00. ТО. ООО «Газприборавтоматикасервис», г.Саратов, 2005, 64 с.
7. Solid State Electronics Center www. magneticsensors. com (800) 323-8295.
8. Datasheet - SS495 - sp // http://catalog.sensing.hoveywell.com/printfriendly.asp? FAM=solidst…,2005.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ РАССТОЯНИЯ, ПРОЙДЕННОГО ВНУТРИТРУБНЫМ СНАРЯДОМ-ДЕФЕКТОСКОПОМ С ОДОМЕТРАМИ | 2006 |
|
RU2316782C1 |
| ВНУТРИТРУБНЫЙ СНАРЯД-ДЕФЕКТОСКОП С ОДОМЕТРАМИ | 2005 |
|
RU2306479C2 |
| ВНУТРИТРУБНЫЙ СНАРЯД-ДЕФЕКТОСКОП С КОЛЕСНЫМИ ОДОМЕТРАМИ | 2007 |
|
RU2334980C1 |
| ОДОМЕТР ДЛЯ ВНУТРИТРУБНОГО СНАРЯДА-ДЕФЕКТОСКОПА | 2004 |
|
RU2275598C2 |
| ВНУТРИТРУБНЫЙ СНАРЯД-ДЕФЕКТОСКОП | 2015 |
|
RU2606205C1 |
| СНАРЯД-ДЕФЕКТОСКОП ДЛЯ КОНТРОЛЯ ОТВЕРСТИЙ В СТЕНКАХ ВНУТРИ ТРУБОПРОВОДА | 1999 |
|
RU2172488C1 |
| Магистральный проходной магнитный дефектоскоп | 2023 |
|
RU2820508C1 |
| ВНУТРИТРУБНЫЙ СНАРЯД-ДЕФЕКТОСКОП С ИЗМЕНЯЕМОЙ СКОРОСТЬЮ ДВИЖЕНИЯ | 2008 |
|
RU2361198C1 |
| СПОСОБ МАГНИТНОЙ ДЕФЕКТОСКОПИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2634366C2 |
| ВНУТРИТРУБНЫЙ ДЕТЕКТОР ВРЕЗОК (ВАРИАНТЫ) | 2005 |
|
RU2280810C1 |
Изобретение относится к области неразрушающего контроля нефтегазопроводов. В известный внутритрубный снаряд-дефектоскоп с одометрами введены трехкомпонентный гироскопический измеритель угловой скорости, трехкомпонентный измеритель кажущегося ускорения, датчики температуры и давления. При этом трехкомпонентный гироскопический измеритель угловой скорости, трехкомпонентный измеритель кажущегося ускорения, датчики температуры и давления, одометры соединены через блок мультиплексоров с соответствующими входами блока аналого-цифрового преобразователя. Выходы блока аналого-цифрового преобразователя соединены по шинам с соответствующими входами координатного процессора. Изобретение направлено на повышение чувствительности получения информации. 2 з.п. ф-лы, 9 ил.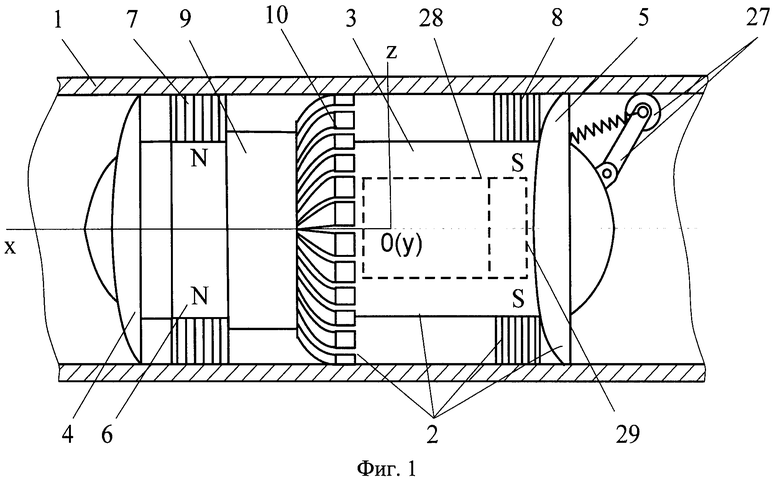
1. Внутритрубный снаряд-дефектоскоп с резервированными датчиками дефектов и одометрами, содержащий являющийся магнитопроводом цилиндрический герметичный контейнер, расположенные на нем в передней и задней частях полюсы постоянного магнита, к которым прикреплены щетки-магнитопроводы, проводники которых ориентированы по радиальным направлениям цилиндрического контейнера, и опорные элементы в виде эластичных манжет с колесами, установленные за пределами полюсов магнита, расположенный по окружности цилиндрического контейнера по крайней мере один пояс ластов с пластинками-накладками, размещенный между полюсами постоянного магнита, в задней части контейнера размещены одометры, в каждом из ластов герметично вмонтированы магниточувствительные датчики дефектов, предназначенные для измерения напряженности магнитного поля трубопровода, с токоведущими проводниками, внутри контейнера размещен блок источников электрического питания, в ластах также герметично размещены микросборки электроники магниточувствительных датчиков дефектов, при этом каждый магниточувствительный датчик дефектов соединен через микросборку электроники с первым блоком мультиплексоров и, соответственно, с первым блоком аналого-цифрового преобразователя, выходы первого блока аналого-цифрового преобразователя и выходы координатного процессора соединены с соответствующими входами центрального процессора, первая группа выходов которого соединена с входами контроллера управления записями на флэш-память, которая предназначена для записи информации в течение времени работы, а также для обеспечения съема выходной информации внутритрубного снаряда-дефектоскопа, а другая группа выходов центрального процессора связана с входами сетевого интерфейса, причем в состав внутритрубного снаряда-дефектоскопа введены трехкомпонентный гироскопический измеритель угловой скорости, трехкомпонентный измеритель кажущегося ускорения, датчики температуры и давления, при этом трехкомпонентный гироскопический измеритель угловой скорости, трехкомпонентный измеритель кажущегося ускорения, датчики температуры и давления, одометры соединены через второй блок мультиплексоров с соответствующими входами второго блока аналого-цифрового преобразователя, а выходы второго блока аналого-цифрового преобразователя соединены по шинам с соответствующими входами координатного процессора, в каждом ласте магниточувствительные датчики дефектов составляют, по меньшей мере, один ряд, а ласты объединены, по меньшей мере, в один круговой пояс.
2. Внутритрубный снаряд-дефектоскоп с резервированными датчиками дефектов и одометрами по п.1, отличающийся тем, что дополнительно введены ласты с образованием дополнительного кругового пояса ластов, который расположен на одинаковом расстоянии по всей своей протяженности от основного кругового пояса.
3. Внутритрубный снаряд-дефектоскоп с резервированными датчиками дефектов и одометрами по п.1, отличающийся тем, что микросборка электроники включает дифференцирующие устройства, входы которых соединены с выходами магниточувствительных датчиков дефектов, а выходы - с соответствующими дополнительными входами первого блока мультиплексоров.
| СНАРЯД-ДЕФЕКТОСКОП ДЛЯ КОНТРОЛЯ ОТВЕРСТИЙ В СТЕНКАХ ВНУТРИ ТРУБОПРОВОДА | 1999 |
|
RU2172488C1 |
| ВНУТРИТРУБНЫЙ СНАРЯД-ДЕФЕКТОСКОП С ОДОМЕТРАМИ | 2005 |
|
RU2306479C2 |
| ОДОМЕТР ДЛЯ ВНУТРИТРУБНОГО СНАРЯДА-ДЕФЕКТОСКОПА | 2004 |
|
RU2275598C2 |
| СНАРЯД-ДЕФЕКТОСКОП ДЛЯ КОНТРОЛЯ ОТВЕРСТИЙ В СТЕНКАХ ВНУТРИ ТРУБОПРОВОДА | 2003 |
|
RU2265816C2 |

