Изобретение относится к области неразрушающего контроля состояния заглубленных магистральных трубопроводов с помощью магнитных полей рассеивания и может быть использовано для выявления коррозионных, стресс-коррозионных дефектов и трещин в стенках трубопроводов.
Известно устройство для магнитной дефектоскопии трубопроводов, содержащее цилиндрическое основание с опорно-ходовыми узлами, расположенную на основании систему намагничивания, образованную кольцевым магнитопроводом, расположенными на обоих концах магнитопровода по его поперечным периметрам постоянными магнитами и кольцевыми щеточными полюсными наконечниками, между которыми размещен многозвенный преобразователь, состоящий из отдельных магниточувствительных элементов, равномерно распределенных по периметру трубопровода, а также аппаратный отсек с блоком питания, обработки и регистрации информации (RU 2133032, 1999 г.).
Известен магнитный проходной дефектоскоп, содержащий цилиндрическое основание с опорной и тянущей манжетами, систему намагничивания, включающую два блока поперечного намагничивания в виде кольцевых поясов, размещенных на цилиндрическом основании, содержащих магнитные модули с попарно встречными направлениями магнитного поля и расположенных со смещением друг относительно друга, систему съема информации, содержащую датчики магнитного поля, размещенные в упругих эластичных элементах с шагом не более 3,5 мм, установленных в межполюсном пространстве магнитных модулей системы намагничивания, выполненных в виде П-образных электромагнитов, с возможностью контакта с внутренней поверхностью трубопровода, дистанцирующие элементы, установленные на блоках поперечного намагничивания, блок питания, блок обработки и накопления информации, блок измерения скорости движения дефектоскопа и регулятор скорости движения в виде винтовых каналов перепуска газа, образованных цилиндрическими стенками корпуса, обеспечивающих вращающий момент вокруг оси дефектоскопа(Яи 2144182, 2000 г.).
Известный дефектоскоп не обеспечивает требуемую скорость контроля (скорость движения дефектоскопа) при скорости газа в трубопроводе больше 10 м/с, что связано с конструкционными особенностями.
Также известен внутритрубный инспекционный снаряд с управляемой скоростью движения, содержащий цилиндрический корпус с передней и задней опорой в виде кольцевых манжет между корпусом и трубопроводом, одометрические датчики скорости перемещения снаряда, блок управления и привод для настройки перепуска газа в виде байпасной системы из шести двухконтурных секций перепуска газа с центральным каналом с соплом и каналом второго контура с соплом в виде дефлектора и дросселя (RU 2293612, 2005 г.).
Известное устройство обеспечивает стабилизацию в заданных пределах скорости перемещения магнитного дефектоскопа за счет процессов истечения газового потока в соплах.
Недостатком указанного решения является сложность конструкции, а также недостаточная точность управления скоростью движения снаряда.
Из известных технических решений наиболее близким к предлагаемому по технической сущности и достигаемому результату является внутритрубный снаряд-дефектоскоп с изменяемой скоростью движения, содержащий цилиндрический корпус, сквозные проходные отверстия внутри корпуса, одометры, компьютерную систему управления, контейнер с блоками питания и электронного оборудования, привод перепуска газа, магниты, закрепленные на цилиндрическом корпусе, датчики магнитного поля трубопровода, щетки-магнитопроводы, объединенные в секции, и устройство для изменения сечения проходных отверстий, выполненное в виде четного числа неподвижных и подвижных поворотных лопаток, закрепленных на соосном поворотном валу, связанном через редуктор с электродвигателем реверсивного электроприводами 2361198, 2008 г.).
В случае превышения снарядом значения скорости V=4 м/с система управления по сигналам одометров, трубок Пито по сигналам датчиков перемещений будет, поворачивая подвижные лопатки 1, изменять сечение проходных отверстий в такой степени, чтобы поддерживать скорость снаряда на уровне не больше заданной скорости.
Однако известное устройство позволяет поддерживать скорость движения в требуемом диапазоне только при скорости движения газа до 10 м/с, в случае же увеличения скорости газа будет возрастать и скорость движения дефектоскопа, что приведет к ухудшению качества данных диагностирования магистрального газопровода или к невозможности их получения в виду большой скорости движения дефектоскопа.
Увеличение перетока газа, необходимое для снижения и поддержания скорости движения дефектоскопа, ограничено наличием неподвижных лопаток, а также секции бортовой аппаратуры, которые, по сути, являются местными гидравлическими сопротивлениями.
Технической проблемой, решаемой настоящим изобретением, является повышение достоверности диагностирования стенки газопровода и упрощение конструкции дефектоскопа.
Поставленная проблема решается тем, что магистральный проходной магнитный дефектоскоп содержит цилиндрическое основание с опорной и тянущей манжетами, систему намагничивания, включающую размещенные на цилиндрическом основании два блока поперечного намагничивания в виде кольцевых поясов, содержащих магнитные модули в виде постоянных магнитов замкнутой формы с попарно встречными направлениями магнитного поля, расположенных со смещением друг относительно друга на π⋅d/2⋅n, где d - диаметр кольцевого пояса системы намагничивания, n - число полюсов кольцевого пояса блока намагничивания и установленных на основании по образующим или под углом к ним не более 10°, систему съема информации, содержащую датчики магнитного поля, размещенные в упругих эластичных элементах, установленных в межполюсном отверстии магнитных модулей системы намагничивания с возможностью контакта с внутренней поверхностью трубопровода, дистанцирующие узлы в виде щеток из магнитомягкого материала, установленные на блоках поперечного намагничивания, блок питания, блок сбора и обработки информации, измерители скорости движения дефектоскопа и блок изменения сечения проходного отверстия для транспортируемого газа, включающий узел перепуска газа, регулятор и привод, при этом узел перепуска газа выполнен в виде лепестковой диафрагмы с изменяющимся углом раскрытия между лепестками и пропускным отверстием между ними в зависимости от изменения скорости движения.
Технический результат заключается в обеспечении поддержания оптимальной скорости движения снаряда в зависимости от скорости движения газа за счет минимизации гидравлического сопротивления при движении дефектоскопа при максимальной скорости газа в газопроводе.
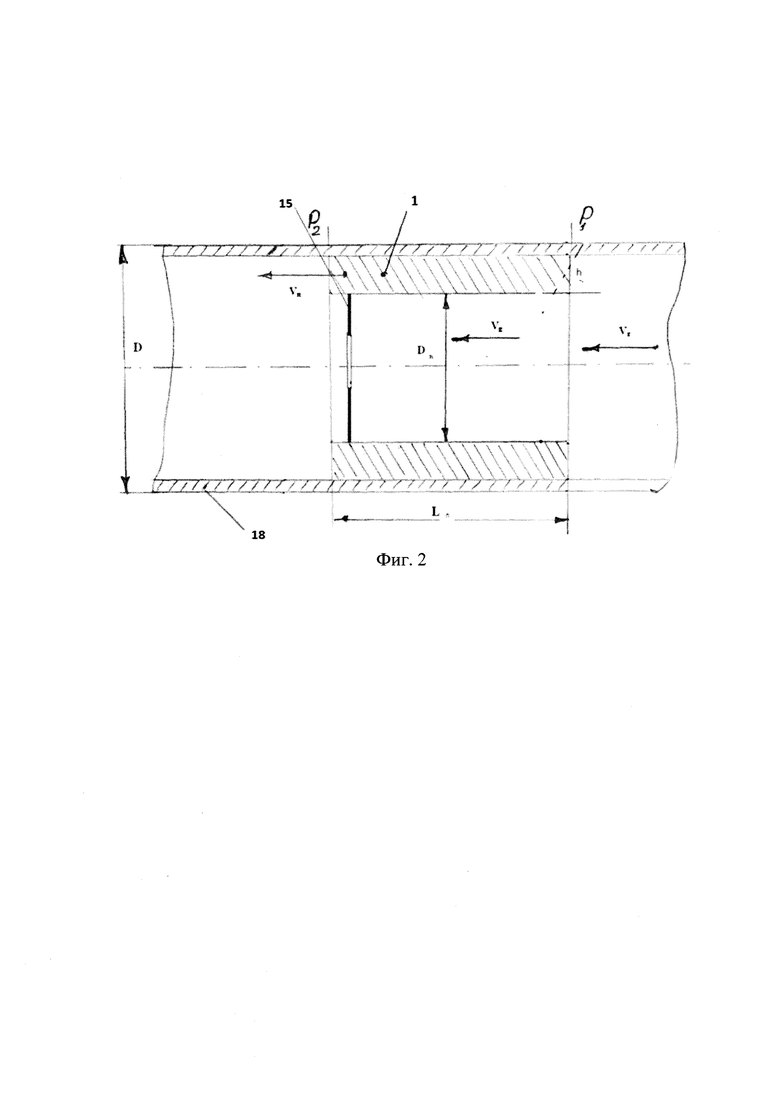
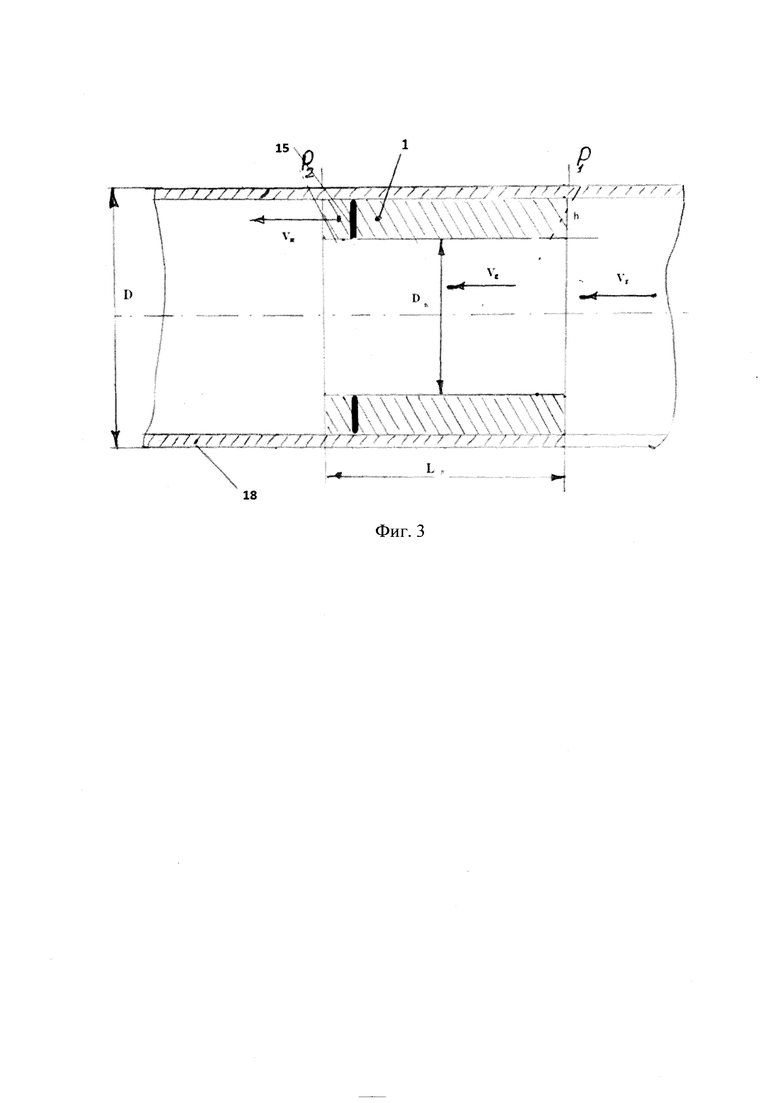
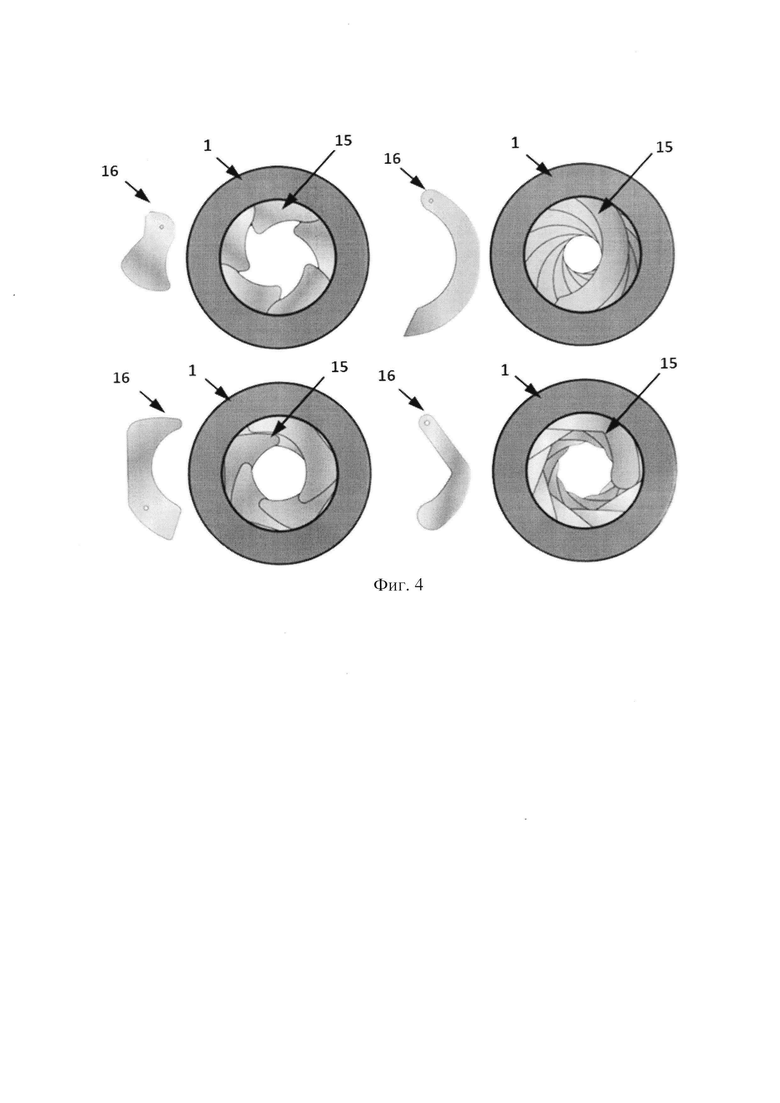
Сущность изобретения поясняется чертежами, где на фиг. 1 приведена принципиальная схема предлагаемого устройства, на фиг. 2 и 3 показаны схемы размещения дефектоскопа в трубопроводе, соответственно, с приоткрытой и полностью открытой регулируемой лепестковой диафрагмой, на фиг. 4 показано конструктивное исполнение диафрагмы.
Магистральный проходной дефектоскоп содержит цилиндрическое основание (корпус) 1 с опорной (центрирующей) манжетой 2 и тянущей манжетой 3. На цилиндрическом основании 1 размещены первый и второй блоки намагничивания 4, 5 в виде кольцевых поясов, расположенных на расстоянии друг от друга по оси устройства. Блоки намагничивания 4 и 5 состоят из магнитных модулей - постоянных магнитов 6. Магнитные модули 6 имеют замкнутую в плане форму. Внутренний контур магнитного модуля 6 может иметь прямоугольную, округлую или эллиптическую форму. Магниты 6 обращены друг к другу одноименными полюсами и имеют попарно встречное направление магнитного поля. Магниты 6 установлены на основании по образующим или под углом а к ним не более 10°. Кольцевые пояса блоков намагничивания 4 и 5 смещены друг относительно друга на π⋅d/2⋅n, где d - диаметр кольцевых поясов, n - число полюсов магнитных модулей кольцевого пояса блока намагничивания. Блоки намагничивания снабжены дистанцирующими узлами 7, выполненными в виде щеток из магнитомягкого материала. Щетки контактируют с внутренней поверхностью трубопровода и замыкают магнитную цепь между источником магнитного поля - блоками намагничивания и трубопроводом. В межполюсном пространстве - отверстии магнитных модулей 6 расположены упругие эластичные элементы - ласты 8, которые контактируют с внутренней поверхностью трубопровода. В ластах 8 размещены датчики 9 магнитного поля (датчики Холла). Датчики 9 расположены в виде матрицы около внутренней поверхности трубопровода на расстоянии друг от друга не более 2,5 мм. Ласты 8 могут быть выполнены из износостойкого полиуретана и снабжены сменными защитными накладками. В ласты 8 встроены аналого-цифровые преобразователи и элементы системы обработки для увеличения помехозащищенности информации, снимаемой с датчиков 9 магнитного поля. Датчики 9 и измерители скорости движения дефектоскопа виде одометров 10 связаны с блоком 11 сбора и обработки информации, расположенным в герметичном отсеке цилиндрического основания 1.
Блок изменения сечения проходного отверстия для транспортируемого газа состоит из узла перепуска газа 12, регулятора 13 и привода 14.
Узел перепуска газа 12 выполнен в виде лепестковой диафрагмы 15 с изменяющимся углом раскрытия между лепестками и пропускным отверстием между ними в зависимости от изменения скорости движения.
Диафрагма 15 состоит из системы металлических подвижных лепестков 16.
В герметичном отсеке расположен блок питания 17, содержащий аккумуляторы.
Позицией 18 обозначен газопровод.
Дефектоскоп работает следующим образом.
Дефектоскоп вводится в магистральный газопровод.
Под действием перепада давления, возникающего на тянущей манжете 3, дефектоскоп начинает двигаться с определенной скоростью. Скорость движения дефектоскопа зависит от многих факторов, а особенно от перепадов высот по трассе трубопровода. Одометры 10 измеряют скорость движения дефектоскопа. В процессе движения дефектоскопа магнитные модули - постоянные магниты 6 кольцевых поясов 4 и 5 системы намагничивания через дистанцирующие узлы 7 намагничивают стенку трубопровода в поперечном направлении до состояния технического насыщения. В местах, где имеется нарушение сплошности материала трубопровода, например в виде продольной трещины, магнитное поле, «обтекая» дефект, выходит за стенку трубопровода, образуя поле рассеивания дефекта с топологией и распределением тангенциальной составляющей напряженности магнитного поля Нт При этом, чем глубже и опаснее дефект, тем больше пиковое значение напряженности магнитного поля над дефектом. При прохождении места дефекта системой съема информации - ластами 8 и опросе датчиков 9 магнитного поля на датчиках, находящихся в зоне магнитного «следа» дефекта, появляются сигналы, обусловленные наличием дефекта, которые поступают в блок сбора и обработки информации 11. Очевидно, что, чем ближе расположены датчики 9, тем более точно можно восстановить распределение магнитного поля рассеивания над дефектом, а тем самым идентифицировать дефект и не пропустить наиболее опасные из них. Необходимо иметь, по крайней мере, три точки съема информации в зоне магнитного следа дефекта в поперечном сечении, чтобы не пропустить максимальное значения напряженности магнитного поля. Установлено, что для этого датчики должны быть расположены на расстоянии не более 3,5 мм. Помимо магнитного поля рассеивания дефекта на датчики 9 действует магнитное поле рассеивания намагничивающей системы 4 и 5. Поэтому сигнал, снимаемый с датчика 9, является суммой сигнала от магнитного поля рассеивания магнитной системы и сигнала от магнитного поля рассеивания дефекта. При незамкнутой форме магнитный модулей, выполненных, как правило, в виде П-образных магнитов, поле рассеивания магнитной системы неоднородно и имеет максимальное значение у полюсов. Поэтому датчики, расположенные в разных точках по отношению к полюсам, находятся под действием значительно отличающегося по величине напряженности намагничивающего поля.
Использование магнитных модулей в виде постоянных магнитов 6 замкнутой формы. Это обеспечивает более равномерное распределение поля в зоне расположения датчиков, что упрощает его учет при обработке информации и позволяет снизить габариты дефектоскопа. Информация, считываемая с датчиков 9, поступает в блок 11 сбора и обработки информации. В результате обработки считанной информации формируется модель пространственного распределения полей рассеивания, по которой определяют наличие, вид, ориентацию и параметры дефектов.
Для обеспечения вращения дефектоскопа и сканирования поверхности трубопровода по винтовой линии магнитные модули 6 располагают под углом образующей цилиндрического основания, не превышающем 10°. При этом за счет возникновения поперечной силы давления газа на стенки модулей 6 появляется вращающий момент, обеспечивающий вращение дефектоскопа вокруг оси. Сканирование поверхности трубопровода по винтовой линии позволяет улучшить выявление дефектов ориентации, отличной от продольной.
В ходе движения дефектоскопа при изменении скорости движения за счет перепуска газа через регулируемое отверстие лепестковой диафрагмы 15 осуществляется ее плавное открытие, обеспечивающее изменение перепада давления на тянущей манжете 3 и, соответственно, поддержание скорости движения дефектоскопа в заданных пределах.
Блок регулятора скорости 13 получает данные от одометров 10 и далее передает дает сигнал приводу 14, который связан с подвижными лепестками 16 диафрагмы 15, и проводит изменение угла их положения с целью увеличения или уменьшения ее пропускного сечения для поддержания требуемой для проведения диагностирования скорости движения дефектоскопа
Регулировка осуществляется посредством регулятора 13 в зависимости от скорости движения газа согласно формуле (1). Чем больше скорость движения газа, тем больше степень открытия диафрагмы, а именно диаметр перепускного отверстия будет увеличиваться согласно формуле (2).
Открытие диафрагмы осуществляется за счет поворота ее подвижных элементов 16 приводом 14, расположенным в ходовой части дефектоскопа 1.
При полном открытии диафрагмы лепестки убираются в кольцевой паз корпуса дефектоскопа 1.
На фиг. 2 представлен вариант с приоткрытой диафрагмой, которая по мере увеличения скорости движения газа открывается больше вплоть до полного открытия, как показано на фиг. 3.
Ниже приведено условие равномерного движения дефектоскопа в газопроводе с фиксированной скоростью:

где х - расстояние по ходу движения дефектоскопа в газопроводе, м;
δ(х) - площадь открытия диафрагмы, м2;
F - площадь поперечного сечения трубопровода, м;
ΔР- потери давления на местные сопротивления в перепускном отверстии дефектоскопа, Па;
 - сила трения, Н;
- сила трения, Н;
k - коэффициент трения, безразмерная величина;
G - вес поршня, Н.
Из приведенной зависимости можно определить диаметр открытия диафрагмы, м.
где х - расстояние по ходу движения поршня в газопроводе, м;
F - площадь поперечного сечения трубопровода, м2;
ΔР- потери давления на местные сопротивления в перепускном отверстии диафрагмы, Па;
 - сила трения, Н;
- сила трения, Н;
k - коэффициент трения, табличная величина, безразмерная величина;
G - вес поршня, Н.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАГИСТРАЛЬНЫЙ ПРОХОДНОЙ МАГНИТНЫЙ ДЕФЕКТОСКОП | 2006 |
|
RU2303779C1 |
| МАГНИТНЫЙ ПРОХОДНОЙ ДЕФЕКТОСКОП | 1998 |
|
RU2144182C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ СТЕНОК ТРУБОПРОВОДОВ | 2011 |
|
RU2453835C1 |
| МАГНИТНЫЙ ПРОХОДНОЙ ДЕФЕКТОСКОП | 2000 |
|
RU2176081C1 |
| ВНУТРИТРУБНЫЙ МАГНИТНЫЙ ДЕФЕКТОСКОП | 2000 |
|
RU2176082C1 |
| ВНУТРИТРУБНЫЙ СНАРЯД-ДЕФЕКТОСКОП С ИЗМЕНЯЕМОЙ СКОРОСТЬЮ ДВИЖЕНИЯ | 2008 |
|
RU2361198C1 |
| ВНУТРИТРУБНЫЙ СНАРЯД-ДЕФЕКТОСКОП С РЕГУЛИРУЕМОЙ СКОРОСТЬЮ ДВИЖЕНИЯ | 2008 |
|
RU2395750C2 |
| СПОСОБ МАГНИТНОГО КОНТРОЛЯ ПРОФИЛЯ ВНУТРЕННЕЙ ПОВЕРХНОСТИ ТРУБОПРОВОДА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2393466C2 |
| ВНУТРИТРУБНЫЙ СНАРЯД-ДЕФЕКТОСКОП С РЕЗЕРВИРОВАННЫМИ ДАТЧИКАМИ ДЕФЕКТОВ И ОДОМЕТРАМИ | 2009 |
|
RU2406082C1 |
| ВНУТРИТРУБНЫЙ ИНСПЕКЦИОННЫЙ СНАРЯД-ДЕФЕКТОСКОП С РЕГУЛИРУЕМОЙ СКОРОСТЬЮ ДВИЖЕНИЯ | 2008 |
|
RU2369783C1 |
Изобретение относится к области неразрушающего контроля состояния заглубленных магистральных трубопроводов. Магистральный проходной магнитный дефектоскоп содержит цилиндрическое основание, систему намагничивания, систему съема информации, содержащую датчики магнитного поля, блок питания, блок сбора и обработки информации, измерители скорости движения дефектоскопа и блок изменения сечения проходного отверстия для транспортируемого газа, включающий узел перепуска газа, регулятор и привод, при этом узел перепуска газа выполнен в виде лепестковой диафрагмы с изменяющимся углом раскрытия между лепестками и пропускным отверстием между ними в зависимости от изменения скорости движения. Технический результат – обеспечение поддержания оптимальной скорости движения снаряда в зависимости от скорости движения газа. 4 ил.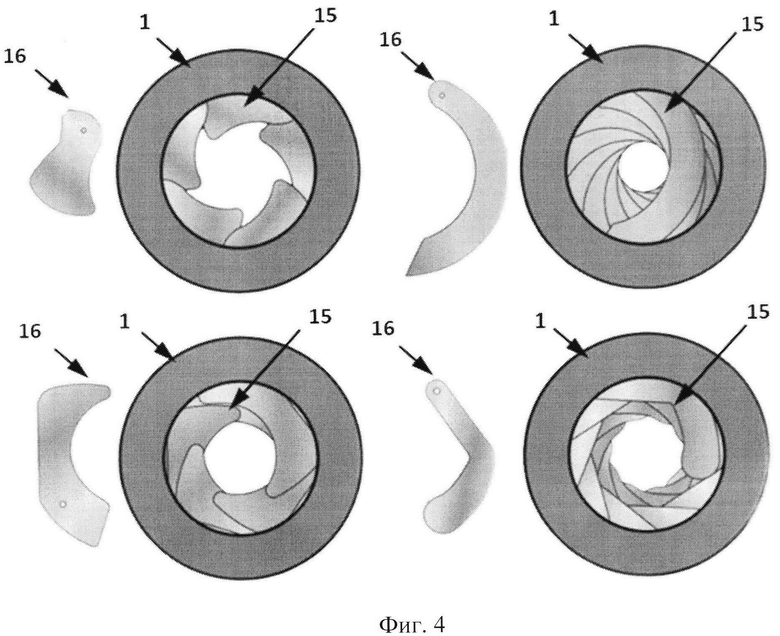
Магистральный проходной магнитный дефектоскоп, характеризующийся тем, что он содержит цилиндрическое основание с опорной и тянущей манжетами, систему намагничивания, включающую размещенные на цилиндрическом основании два блока поперечного намагничивания в виде кольцевых поясов, содержащих магнитные модули в виде постоянных магнитов замкнутой формы с попарно встречными направлениями магнитного поля, расположенных со смещением друг относительно друга на π⋅d/2⋅n, где d - диаметр кольцевого пояса системы намагничивания, n - число полюсов кольцевого пояса блока намагничивания, и установленных на основании по образующим или под углом к ним не более 10°, систему съема информации, содержащую датчики магнитного поля, размещенные в упругих эластичных элементах, установленных в межполюсном отверстии магнитных модулей системы намагничивания с возможностью контакта с внутренней поверхностью трубопровода, дистанцирующие узлы в виде щеток из магнитомягкого материала, установленные на блоках поперечного намагничивания, блок питания, блок сбора и обработки информации, измерители скорости движения дефектоскопа и блок изменения сечения проходного отверстия для транспортируемого газа, включающий узел перепуска газа, регулятор и привод, при этом узел перепуска газа выполнен в виде лепестковой диафрагмы с изменяющимся углом раскрытия между лепестками и пропускным отверстием между ними в зависимости от изменения скорости движения.
| ВНУТРИТРУБНЫЙ СНАРЯД-ДЕФЕКТОСКОП С ИЗМЕНЯЕМОЙ СКОРОСТЬЮ ДВИЖЕНИЯ | 2008 |
|
RU2361198C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ АППАРАТА ДЛЯ ВНУТРИТРУБНОГО ОБСЛЕДОВАНИЯ И АППАРАТ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2329432C1 |
| US 6098231 A, 08.08.2000 | |||
| CN 106269734 A, 04.01.2017. | |||

