Область техники
Данное изобретение связано со средствами и приборами для оценки состояния и параметров батарейных источников питания при помощи метода цифровой фильтрации. В частности, при помощи двухступенчатой фильтрации Кальмана и расширенной двухступенчатой фильтрации Кальмана.
Предпосылки создания технологии
В рамках технологии, связанной с аккумуляторными источниками питания, в некоторых приложениях требуется иметь возможность оценивать величины, которые описывают их текущее состояние, но которые не могут быть измерены непосредственно. Некоторые из этих величин могут изменяться довольно быстро, как, например, заряд батареи, значение которого может сильно меняться в течение нескольких минут. Другие изменяются весьма медленно, как, например, емкость элемента питания, которая может поменять свое значение только на 20% за более чем десятилетие постоянного использования. Быстроменяющиеся величины образуют «состояние» системы, а величины, которые изменяются медленно, составляют зависящие от времени «параметры» системы.
При использовании аккумуляторных источников питания, особенно если они предназначены для длительной бесперебойной работы, как например в случае транспортных средств с гибридным двигателем, электромобилей, батарей для ноутбуков, инструментов с портативными источниками питания и т.п., необходимо знать информацию о быстроменяющихся параметрах (например, заряде батареи) для того, чтобы оценить, например, количество оставшейся в батарее энергии. Более того, может потребоваться информация о медленно меняющихся параметрах (например, о емкости батареи) для того, чтобы обеспечить необходимую точность предварительных расчетов в течение всего срока службы портативного источника питания, что увеличивает продолжительность технического обслуживания и помогает выяснить степень исправности источника питания.
Существует большое количество методов оценки состояния элемента питания, которые обычно сводятся к определению трех величин: заряда батареи (быстроменяющаяся величина), уменьшения мощности и уменьшения емкости (медленные процессы). Снижение мощности и снижение емкости можно вычислить, зная, например, текущее и начальное значения электрического сопротивления и общей емкости источника питания соответственно, хотя применяются и другие методы. Степень снижения мощности и емкости часто объединяют в один термин «степень исправности». Используя значения этих переменных, можно получить и другую информацию, например, максимальное количество электроэнергии, которое на данный момент может быть запасено в батарее. Для отдельных приложений могут понадобиться дополнительные элементы состояния или параметры, и для определения каждого из них необходимы особые методы.
Уровень заряда батареи - это величина, обычно выраженная в процентах, которая показывает долю текущего заряда, запасенного в батарее, по отношению к емкости батареи.
Для оценки уровня заряда батареи было предложено множество подходов: испытание на разряд, метод подсчета ампер-часов (кулоновское вычисление), выявление свойств электролита, измерение напряжения холостого хода, линейное и нелинейное моделирование цепи, спектроскопия импеданса, измерение внутреннего сопротивления, coup de fouet и некоторые разновидности фильтрации Кальмана. При испытании на разряд элемент батареи полностью разряжается. Использование этого метода препятствует функционированию системы во время самого испытания. Кроме того, испытание может занимать слишком много времени, что делает этот метод непригодным для многих приложений.
Метод подсчета ампер-часов (кулоновское вычисление) относится к методам, использующим разомкнутую цепь, точность которых уменьшается со временем из-за накопления погрешности измерения. Свойства электролита могут быть определены только у свинцово-кислотных батарей, что ограничивает применимость метода. Метод, основанный на измерении напряжения холостого хода, можно применять только после продолжительных периодов бездействия элементов питания с пренебрежимо малым эффектом гистерезиса; он не годится при наличии изменяющихся условий работы. Использование линейного и нелинейного моделирования цепи не дает заряд батареи напрямую; величина заряда должна быть выражена через вычисленные значения. Спектроскопия импеданса требует выполнения измерений, не всегда доступных в приложениях общего назначения. Метод, основанный на определении внутреннего сопротивления, очень чувствителен к погрешности измерения и требует выполнения измерений, которые не всегда доступны в приложениях общего назначения. Coup de fouet применим только для свинцово-кислотных батарей. При использовании различных разновидностей методов фильтрации Кальмана, в которых не используется заряд батареи в качестве состояния фильтра, нельзя напрямую получить значения пределов погрешности. В другом методе, описанном в патенте США 6534954, используется фильтр (предпочтительно кальмановский фильтр) для оценки заряда батареи при помощи использования известной математической модели динамических свойств и измерения ЭДС, тока и температуры элемента питания. Данный метод пригоден для непосредственной оценки состояния элемента питания. Тем не менее, метод не учитывает значения параметров элемента питания.
Требуется знание не только уровня заряда батареи, но также и знание степени ее исправности. Поэтому нужно понимать, что снижение мощности элемента питания связано с явлением возрастания электрического сопротивления элемента питания по мере его старения. Возрастание сопротивления служит причиной снижения энергии, которая может быть запасена/отдана источником. Снижение емкости связано с явлением уменьшения общей емкости элемента питания по мере его старения. Сопротивление и емкость элемента питания являются изменяющимися во времени параметрами. Известные технические решения предполагают применение следующих подходов для определения степени исправности элемента питания: испытание на разряд, методы, основанные на определении химического состава, омические испытания и частичный разряд. В испытании на разряд происходит полная разрядка полностью заряженного элемента питания с целью определить его общую емкость. Использование этого метода прерывает функционирование системы и впустую тратит энергию, запасенную в элементе питания.
Различные химические методы включают в себя определение степени коррозии пластин, плотности электролита и «coup de fouet» в случае свинцово-кислотных батарей. Омические испытания включают анализ сопротивления, активной проводимости и импеданса с возможным привлечением алгоритмов нечеткой логики и/или нейронных сетей. Эти методы требуют трудоемких вычислений. При частичном разряде и других методах тестируемый элемент питания сравнивается с образцовым или эталонным элементом.
Существует потребность в способе, обеспечивающем возможность одновременной оценки состояния и параметров элемента питания. Более того, требуется, чтобы соответствующие испытания не прерывали функционирование системы и не расходовали понапрасну энергию. Способы должны быть общеприменимыми (т.е. применимы в случае различных типов гальванических элементов и для разных приложений), не должны требовать трудоемких вычислений и одновременно с этим быть достаточно точными. От способов и соответствующих им приборов требуется возможность автоматического определения изменяющихся во времени параметров, таких как сопротивление элемента питания и его емкость. Также способ должен быть применим для различных конфигураций параллельного и/или последовательного соединения элементов питания в батарее.
Краткое описание чертежей
Эти и другие особенности, аспекты и преимущества данного изобретения легче понять благодаря приведенному ниже описанию, прилагаемой формуле изобретения и сопутствующим схемам, где подобные элементы отмечены так же, как и на чертежах:
Фиг.1 представляет собой блок-схему, иллюстрирующую типичную систему, предназначенную для оценки состояния и параметров в соответствии с характерной модификацией изобретения; и
Фиг.2 представляет собой блок-схему, описывающую метод двухступенчатой фильтрации в соответствии с характерной модификацией изобретения.
Описание изобретения
На нескольких примерах осуществления здесь описываются способы и прибор для оценки состояния и параметров гальванического элемента, в частности, например, для оценки величин, характеризующих состояние и параметры элемента питания. Первым аспектом изобретения является способ оценки текущего состояния и текущих параметров системы гальванических элементов, включающий в себя оценку величин, характеризующих состояние гальванического элемента при помощи фильтра состояния; оценку величин, характеризующих параметры гальванического элемента, при помощи фильтра параметров, и обмен информацией между фильтром состояния и фильтром параметров.
Следующий аспект - это прибор, сконфигурированный для того, чтобы оценивать текущее состояние и текущие параметры гальванического элемента. Этот прибор включает в себя первый составной элемент, сконфигурированный для определения величин, характеризующих состояние элемента питания, и второй составной элемент, сконфигурированный для оценки величин, характеризующих параметры элемента питания. Эти составные элементы связаны между собой для осуществления обмена информации между ними.
Кроме того, приводится пример реализации системы для оценивания текущего состояния и текущих параметров гальванического элемента, которая включает в себя средство для оценивания величин, характеризующих состояние гальванического элемента при помощи фильтра состояний, средство для оценивания величин, характеризующих параметры гальванического элемента при помощи фильтра параметров, а также средство, осуществляющее обмен информацией между фильтром состояния и фильтром параметров.
Далее, в качестве примера другого варианта реализации здесь описывается носитель информации, оснащенный машинно-считываемой управляющей программой, которая включает в себя команды, благодаря которым вычислительное устройство реализует вышеупомянутый способ оценки текущего состояния и текущих параметров гальванического элемента.
Также здесь в качестве еще одного примера реализации описывается компьютерный сигнал передачи данных, воплощенный в машиночитаемом носителе. Сигнал передачи данных содержит компьютерный код, созданный так, чтобы вычислительное устройство реализовало вышеупомянутый метод оценки текущего состояния и текущих параметров гальванического элемента.
Лучший вариант осуществления изобретения
На примерах различных реализаций здесь описываются способы, системы и приборы для оценки состояния и параметров гальванического элемента при помощи двухступенчатой фильтрации. В дальнейшем описании, опирающемся на фиг.1 и 2, изложены многочисленные особенности, обеспечивающие лучшее понимание данного изобретения.
Следует иметь в виду, что хотя приведенные примеры реализации изобретения описаны как имеющие непосредственное отношение к элементам батареи в качестве гальванических элементов, они также могут быть применены к различным электрохимическим элементам, таким как батареи, блоки батарей, конденсаторы, батареи конденсаторов, топливные батареи, электролитические батареи и т.п., а также комбинированные устройства, включающие в себя по крайней мере один из вышеупомянутых элементов. Более того, должно быть принято во внимание то обстоятельство, что батарея или блок батарей могут включать в себя множество элементов питания, в котором характерные модификации, описанные в данном документе, относятся к нескольким элементам питания из всего множества.
Один или несколько примеров воплощений данного изобретения осуществляют оценку величин, характеризующих состояние и параметры элемента питания, при помощи метода двухступенчатой фильтрации. Несколько примеров воплощений данного изобретения осуществляют оценку величин, характеризующих состояние и параметры элемента питания, при помощи метода двухступенчатой фильтрации Кальмана. Некоторые модификации данного изобретения осуществляют оценку величин, характеризующих состояние и параметры элемента питания, при помощи метода расширенной двухступенчатой фильтрации Кальмана. Некоторые примеры реализации позволяют одновременно оценивать состояние заряда батареи, снижение мощности и/или емкости элемента, в то время как другие реализации позволяют оценивать дополнительные величины, характеризующие состояние элемента питания, и/или дополнительные зависящие от времени величины, характеризующие параметры элемента питания. Также следует иметь в виду, что хотя для описания и объяснения примеров реализации применяется термин «фильтрация», этот термин покрывает также методики рекурсивного предсказания и коррекции, объединенно называемых фильтрацией, которая включает в себя, фильтрацию Кальмана и/или расширенную фильтрацию Кальмана, но не ограничивается этим.
На фиг.1 изображены компоненты системы 10 оценки состояния и параметров элемента питания согласно одному из вариантов осуществления изобретения. Блок гальванических элементов 20, включающий в себя множество элементов питания 22 и составляющий, например, батарею, подсоединен к цепи нагрузки 30. Цепью нагрузки 30 может быть, например, двигатель электромобиля или транспортного средства с гибридным двигателем. Прибор, предназначенный для измерения различных характеристик и свойств элемента питания, отмечен цифрой 40. Измерительный прибор 40 может, например, включать в себя устройство, измеряющее напряжение на зажимах элемента питания, такое как датчик напряжения 42, например вольтметр, в то время как измерения тока элемента питания осуществляются при помощи датчика тока 44, например амперметра. Дополнительно можно производить измерения температуры элемента питания при помощи датчика температуры 46, например термометра. Также возможно использование датчиков ЭДС и/или датчиков импеданса 48 для отдельных типов элементов питания. Если требуется определить какие-либо другие характеристики и свойства элемента(ов) питания, то для этого могут быть использованы соответствующие датчики. Результаты измерений напряжения, тока и температуры (не обязательно) обрабатываются ЛС арифметического устройства 50, например процессором или вычислительным устройством, которое оценивает состояние и параметры элемента(ов) питания. Система может также включать в себя любой известный носитель данных 52. Носитель данных может быть связан с ЛС арифметического устройства 50 посредством множества способов, например распространяющегося сигнала 54. Следует отметить, что для того, чтобы производить измерения, касающиеся внутренних деталей элемента питания 12, нет необходимости использовать дополнительное измерительное оборудование, хотя таковое и может применяться в рамках данного изобретения. Также отметим, что все измерения могут производиться бесконтактным (не вносящим нагрузки) способом; то есть нет необходимости в проникновении сигнала в систему, что может послужить помехой для правильной работы цепи нагрузки 30.
Для того чтобы осуществлять заданные функции и необходимую обработку данных, а также вычисления (например, моделирование, описанную в данном документе оценку состояния и параметров и т.п.), ЛС арифметического устройства 50 может включать в себя, например, процессор(ы), логическую(ие) матрицу(ы), заказные логические схемы, вычислительное(ые) устройство(а), запоминающее устройство, устройство внешней памяти, регистр(ы), устройство синхронизации, устройство(а) прерывания, аппаратный(е) интерфейс(ы) и интерфейсы входного/выходного сигнала, а также комбинированные устройства, включающие в себя по крайней мере один из вышеупомянутых элементов. ЛС арифметического устройства 50 также может содержать входное устройство, фильтр входного сигнала и т.п. для того, чтобы обеспечить точную дискретизацию и преобразование или сбор данных из интерфейсов и входных устройств. Дополнительные особенности ЛС арифметического устройства 50 и конкретные процессы обработки будут основательно рассмотрены в следующем разделе.
Некоторые примеры реализации данного изобретения могут быть реализованы в виде нового или усовершенствованного программно-аппаратного обеспечения и программного обеспечения, выполняемого ЛС арифметической цепи 50 и/или другими обрабатывающими контроллерами. Функции программного обеспечения включают функции программно-аппаратного обеспечения, но не ограничиваются ими, и могут быть реализованы в аппаратных средствах, программном обеспечении или их сочетаниях. Таким образом, явным преимуществом данного изобретения является то, что оно может быть реализовано в сочетаниях с уже существующими и/или новыми системами обработки данных для зарядки и контроля гальванического элемента.
В одном примере реализации изобретения ЛС арифметического устройства 50 использует математическую модель элемента питания 12, которая содержит отличительные черты динамического режима системы, включающие в себя состояние заряда батареи в качестве модельного состояния, но не ограничивающиеся им. В одном из вариантов осуществления данного изобретения используется модель с дискретным временем. Пример модели в (возможно нелинейном) пространстве состояний с дискретным временем можно записать в виде

где xk - это состояние системы, θk - набор изменяющихся во времени параметров модели, uk - внесистемные входы, уk - выходы, a wk и vk - «шумовые» сигналы. Все величины могут быть векторами или скалярами. f(;;·) и g(;;·) - это функции, вид которых определяется используемой моделью элемента питания. Не зависящие от времени величины, необходимые для создания модели, могут быть заключены в выражения для функций f(;;·) и g(;;·) и не включаются в θk.
Элементами состояния системы являются, по крайней мере, минимальное количество информации, а также текущие входы и математическая модель элемента питания, что необходимо для прогнозирования текущего значения на выходе. Для элемента 12 состояние может определяться уровнем заряда батареи, величиной ЭДС поляризации по отношению к различным моментам времени и, например, величиной гистерезиса. Входы системы uk по крайней мере включают в себя текущий ток элемента питания и могут также содержать величину температуры элемента питания (если температура не является элементом состояния системы). Параметры системы θk - это величины, которые медленно меняются с течением времени, так что они не могут быть непосредственно определены на основе знания значений на входах и соответствующих им значений на выходах системы. Этими параметрами могут быть емкость элемента питания, сопротивление, постоянная(ые) времени ЭДС поляризации, коэффициент(ы) усреднения ЭДС поляризации, коэффициент(ы) усреднения гистерезиса, константа(ы) скорости гистерезиса, коэффициенты) полезного действия и др. Выходы модели уk соответствуют физически измеримьм величинам, характеризующим элемент питания, или тем величинам, которые могут быть непосредственно выражены из измеренных величин. Примером выхода является напряжение на зажимах элемента питания, включенного в цепь нагрузки.
Для описания динамики параметров также используется математическая модель.
Характерный ее вид:

Первое равенство утверждает, что параметры в главном приближении являются постоянными величинами, хотя и могут медленно меняться во времени, и поэтому моделируются при помощи искусственно вводимого «шумового» процесса, обозначенного rk. Результатом оптимального процесса динамики параметров является оценка выходного значения элемента питания плюс погрешность этой оценки еk.
Задав модели динамики состояния системы и параметров в примере реализации, можно применить процедуру двухступенчатой фильтрации. Здесь также могут применяться либо двухступенчатые фильтры Кальмана, либо расширенные двухступенчатые фильтры Кальмана. Кроме того, также могут применяться сочетания упомянутых выше фильтров. Таблица 1 изображает пример реализации способа и системы, использующих двухступенчатую расширенную фильтрацию Кальмана. Процедура запускается после задания оценочного значения параметра  наиболее близкого к действительным параметрам, например
наиболее близкого к действительным параметрам, например  и после задания оценочного значения состояния
и после задания оценочного значения состояния  наилучшим образом отражающего состояние элемента питания, например,
наилучшим образом отражающего состояние элемента питания, например,  Также задаются ковариационные матрицы погрешностей оценок
Также задаются ковариационные матрицы погрешностей оценок  и
и  Например, задание уровня заряда батареи должно быть оценено на основании значения напряжения на зажимах элемента питания, указанного в справочной таблице, или на основе той информации, которая была предварительно сохранена, когда блок элементов питания последний раз выключался. В других примерах может использоваться промежуток времени, в течение которого батарейная установка бездействовала с момента ее выключения, и т.п.
Например, задание уровня заряда батареи должно быть оценено на основании значения напряжения на зажимах элемента питания, указанного в справочной таблице, или на основе той информации, которая была предварительно сохранена, когда блок элементов питания последний раз выключался. В других примерах может использоваться промежуток времени, в течение которого батарейная установка бездействовала с момента ее выключения, и т.п.
Расширенный двухступенчатый фильтр Кальмана для обновления состояния и весовых коэффициентов.









В этом примере выполняется несколько шагов на каждом этапе измерения. Сначала предыдущая оценка параметра развивается во времени. Новая оценка параметра равняется старой оценке, и неопределенность погрешности вычисления параметра увеличивается с течением времени (что согласовывается в данной модели при помощи искусственно вводимого шума rk). Существуют различные возможности для обновления оценки неопределенности в значении параметра - в таблице указан лишь отдельный пример. Оценка состояния и его неопределенности изменяются с очередным шагом по времени. Далее производится измерение значения на выходе и сравнивается с предсказанным значением, основанным на оценке состояния  и оценке параметра
и оценке параметра  разница между этими значениями используется для обновления величин
разница между этими значениями используется для обновления величин  и
и  Можно легко заметить, что указанные в таблице шаги могут быть выполнены в разном порядке (т.е. при различных последовательностях выполнения шагов). Хотя в таблице в качестве примера указан определенный порядок шагов, сведущие в данной области специалисты могут найти множество других эквивалентных вариантов упорядоченного набора уравнений.
Можно легко заметить, что указанные в таблице шаги могут быть выполнены в разном порядке (т.е. при различных последовательностях выполнения шагов). Хотя в таблице в качестве примера указан определенный порядок шагов, сведущие в данной области специалисты могут найти множество других эквивалентных вариантов упорядоченного набора уравнений.
Теперь обратимся к фиг.2, на которой в качестве примера изображена реализация данного изобретения. Изображены два параллельно соединенных фильтра. Один фильтр 101/102 применяется для оценки состояния  второй фильтр 103/104 применяется для оценки параметров
второй фильтр 103/104 применяется для оценки параметров  Кроме того, обмен информацией между фильтрами дает возможность передачи скорректированных значений параметров от фильтра параметров 103/104 к фильтру состояний 101/102. Оба фильтра 101/102, 103/104 обладают способностью к временному обновлению или возможностью предсказания и способностью к уточнению измерений или возможностью коррекции. Блок временного обновления/предсказания состояния 101 получает на вход предыдущие значения uk-1 (которые могут включать в себя, например, ток элемента питания и/или его температуру) наряду с оцененной на предыдущем шаге величиной
Кроме того, обмен информацией между фильтрами дает возможность передачи скорректированных значений параметров от фильтра параметров 103/104 к фильтру состояний 101/102. Оба фильтра 101/102, 103/104 обладают способностью к временному обновлению или возможностью предсказания и способностью к уточнению измерений или возможностью коррекции. Блок временного обновления/предсказания состояния 101 получает на вход предыдущие значения uk-1 (которые могут включать в себя, например, ток элемента питания и/или его температуру) наряду с оцененной на предыдущем шаге величиной  характеризующей состояние системы, и оценку неопределенности состояния
характеризующей состояние системы, и оценку неопределенности состояния  и текущие предсказанные значения параметров
и текущие предсказанные значения параметров  Блок временного обновления/предсказания состояния 101 дает на выходе предсказанное состояние
Блок временного обновления/предсказания состояния 101 дает на выходе предсказанное состояние  и предсказанную неопределенность состояния
и предсказанную неопределенность состояния  и посылает эти значения на входы блока уточнения измерений/коррекции (блока, осуществляющего последовательные приближения) состояния 102 и на входы блока уточнения измерений/коррекции параметров 104. Блок уточнения измерений/коррекции состояния 102 дает оценку текущего состояния системы
и посылает эти значения на входы блока уточнения измерений/коррекции (блока, осуществляющего последовательные приближения) состояния 102 и на входы блока уточнения измерений/коррекции параметров 104. Блок уточнения измерений/коррекции состояния 102 дает оценку текущего состояния системы  и оценку неопределенности состояния
и оценку неопределенности состояния  Блок временного обновления/предсказания параметров 103 получает в качестве входных значений предыдущие значения зависящих от времени оценок параметров
Блок временного обновления/предсказания параметров 103 получает в качестве входных значений предыдущие значения зависящих от времени оценок параметров  и оценку неопределенности параметров
и оценку неопределенности параметров  Блок временного обновления/предсказания параметров 103 выдает предсказанные параметры
Блок временного обновления/предсказания параметров 103 выдает предсказанные параметры  и предсказанную неопределенность параметров
и предсказанную неопределенность параметров  и посылает их на входы блока уточнения измерений/коррекции параметров 104 и блока временного обновления состояния 101. Блок уточнения измерения параметров 104 выдает текущую оценку параметров
и посылает их на входы блока уточнения измерений/коррекции параметров 104 и блока временного обновления состояния 101. Блок уточнения измерения параметров 104 выдает текущую оценку параметров  и оценку неопределенности параметров
и оценку неопределенности параметров  Также надо принять во внимание, что знак "минус" отмечает, что вектор является результатом предсказания элементами 101, 103 фильтров, а знак "плюс" отмечает, что вектор получен в результате коррекции элементами 102/104 фильтров.
Также надо принять во внимание, что знак "минус" отмечает, что вектор является результатом предсказания элементами 101, 103 фильтров, а знак "плюс" отмечает, что вектор получен в результате коррекции элементами 102/104 фильтров.
Для реализации данного изобретения нужна математическая модель состояния элемента питания и динамики выходных значений для отдельных приложений. В рассмотренном примере это требование реализуется посредством задания функций f(;;·) и g(;;·). В одном из примеров реализации используется модель элемента питания, которая описывает также свойства, возникающие в результате действия одного или нескольких следующих факторов: существования напряжения холостого хода для элемента питания, внутреннего сопротивления, постоянных времени ЭДС поляризации, а также величину гистерезиса. Для наглядности значения параметров подобраны в данной модели таким образом, чтобы смоделировать динамику элемента литий-ионной батареи большой мощности, хотя устройство и методы, представленные здесь, являются универсальными и могут быть применимы и к другим электрохимическим элементам.
В данном примере состояние заряда батареи регистрируется при помощи отдельных модельных состояний. Соответствующее равенство выглядит следующим образом:

где Δt означает промежуток модельного времени (в секундах), Ck - емкость элемента питания с номером k в блоке (в ампер-секундах), zk[m] - уровень заряда элемента k в момент времени m, ik - ток, вытекающий из элемента k, и ηi есть коэффициент полезного действия элемента при величине тока ik.
В данном примере величины ЭДС поляризации регистрируются несколькими состояниями фильтров. Если мы предположим, что есть nf констант времени ЭДС поляризации, то

Матрицу  можно считать диагональной матрицей с действительными константами времени ЭДС поляризации а…anf. В этом случае система является устойчивой, когда все значения на входах меньше 1. В качестве значений для элементов вектора
можно считать диагональной матрицей с действительными константами времени ЭДС поляризации а…anf. В этом случае система является устойчивой, когда все значения на входах меньше 1. В качестве значений для элементов вектора  можно выбрать значения 1 nf. Входные значения в Bf не так уж важны, пока они остаются ненулевыми. Значения nf входных данных в матрице Af задаются в рамках процедуры определения системы таким образом, чтобы модельные параметры лучше соответствовали измеренным данным, характеризующим элемент питания. Матрицы Af и Bf могут изменяться с течением времени, а также зависеть от других факторов, имеющих отношение к текущему эксплуатационному режиму блока батарей.
можно выбрать значения 1 nf. Входные значения в Bf не так уж важны, пока они остаются ненулевыми. Значения nf входных данных в матрице Af задаются в рамках процедуры определения системы таким образом, чтобы модельные параметры лучше соответствовали измеренным данным, характеризующим элемент питания. Матрицы Af и Bf могут изменяться с течением времени, а также зависеть от других факторов, имеющих отношение к текущему эксплуатационному режиму блока батарей.
В данном примере величина гистерезиса регистрируется отдельным состоянием

где γ - это константа скорости гистерезиса, также определяемая при задании системы.
В данном примере итоговое модельное состояние
xk[m]=[fk[m]T hk[m] zk[m]]T,
где также возможна и другая расстановка состояний. Равенство, дающее состояние модели, образовано объединением всех отдельных равенств, указанных выше.
В данном примере итоговым равенством, которое объединяет величины, характеризующие состояние для предсказания значения ЭДС элемента питания, является

где  является вектором коэффициентов усреднения ЭДС поляризации g1…gnf, при помощи которого осуществляется усреднение значений ЭДС поляризации и получения соответствующего значения на выходе, R - это сопротивление элемента питания (значение которого может быть разным для разрядки и зарядки), и М является коэффициентом усреднения гистерезиса. Отметим, что на G могут быть наложены такие ограничения, что прирост тока от ik до Gfk [будет] равен нулю.
является вектором коэффициентов усреднения ЭДС поляризации g1…gnf, при помощи которого осуществляется усреднение значений ЭДС поляризации и получения соответствующего значения на выходе, R - это сопротивление элемента питания (значение которого может быть разным для разрядки и зарядки), и М является коэффициентом усреднения гистерезиса. Отметим, что на G могут быть наложены такие ограничения, что прирост тока от ik до Gfk [будет] равен нулю.
В данном примере параметрами являются

В любом варианте реализации при помощи двухступенчатых фильтров производится регулировка состояния и параметров таким образом, что соотношения между вводом и выводом в модели совпадают с измеренными данными ввода-вывода с как можно большей степенью точности. Это не гарантирует, что модельное состояние будет сходиться к физически реализуемым состояниям. В одном варианте осуществления изобретения применяются дополнительные шаги для того, чтобы обеспечить сходимость модельного состояния к состоянию заряда элемента. В еще одном варианте модель элемента питания применяемая для двухступенчатой фильтрации может быть расширена дополнительной моделью элемента, включающей в себя в качестве выходов такие состояния, которые должны сходиться к истинным значениям.
Примером такой дополнительной модели является

Значения на выходах вспомогательной модели сравниваются с измеренными выходными значениями двухступенчатого фильтра.
В примере реализации измеренное значение уровня заряда элемента питания можно аппроксимировать при помощи  , получаемого так:
, получаемого так:

Измеряя напряжение на зажимах элемента питания, включенного в сеть нагрузки, его ток, а также зная R (например, благодаря значению  , взятому из двухступенчатого фильтра) и имея обратную функцию напряжения холостого хода для гальванического элемента, в данном примере можно вычислить зашумленное значение уровня заряда элемента
, взятому из двухступенчатого фильтра) и имея обратную функцию напряжения холостого хода для гальванического элемента, в данном примере можно вычислить зашумленное значение уровня заряда элемента 
В данном примере применяется двухступенчатый фильтр для данной модифицированной модели, использующий измеренные данные для их же корректировки

Испытания показали, что хотя шум (временные отклонения, возникающие вследствие пренебрежения эффектами гистерезиса и ЭДС поляризации) и препятствует использовать  в качестве исходной оценки для уровня заряда элемента, его ожидаемые долговременные свойства при быстро меняющихся условиях точно определены, что обеспечивает точность определения состояния заряда элемента питания при использовании двухступенчатого фильтра.
в качестве исходной оценки для уровня заряда элемента, его ожидаемые долговременные свойства при быстро меняющихся условиях точно определены, что обеспечивает точность определения состояния заряда элемента питания при использовании двухступенчатого фильтра.
Другой пример реализации включает в себя способы оценки важных аспектов, позволяющих судить о степени исправности элемента, не применяя при этом полный двухступенчатый фильтр. Способ, предполагающий использование полного двухступенчатого фильтра, может требовать большого объема вычислений. Если же для полного набора модельных параметров элемента нет необходимости указывать точные значения, то можно применять методы, которые являются потенциально менее сложными или не требующими большого объема вычислений. В примерах реализации емкость элемента питания и его сопротивление определяются при помощи методов фильтрации. Отклонения емкости и сопротивления от номинальных значений (реализуемых, например, в новых элементах питания) позволяют найти снижение емкости и снижение мощности, т.е. те показатели, по которым в большинстве случаев можно судить о степени исправности элемента питания.
В данном примере для оценки сопротивления элемента при помощи техники фильтрации мы определяем модель

где Rk[m] есть сопротивление элемента питания, которое построено в виде суммы постоянной величины и вводимого искусственно шума rk, который обеспечивает подстройку; yk[m] является грубой оценкой напряжения на зажимах элемента питания, ik - ток элемента питания, а ek моделирует погрешность оценки. Если мы используем оценку zk, полученную при помощи двухступенчатого фильтра, или из другого источника, то мы просто применяем фильтр к этой модели, чтобы найти сопротивление элемента питания. В стандартном фильтре сравнивается предсказанное моделью значение yk с действительным ЭДС элемента питания, полученным в результате измерений, а использование разницы дает возможность регулировать значение Rk.
Отметим, что указанная выше модель может быть расширена на случай различающихся значений сопротивления при различных состояниях элемента питания. Например, на различия, полученные при зарядке и разрядке, разных уровнях заряда элемента питания и разных температурах. Скалярная величина Rk тогда стала бы вектором, содержащим в себе все изменяющиеся значения сопротивлений, и на каждом шаге вычислений рассматривался бы соответствующий элемент этого вектора.
В данном примере для того, чтобы оценить емкость элемента питания при помощи фильтра, мы снова определяем модель элемента питания:

Здесь также для получения оценки емкости используется соответствующий данной модели фильтр. Так, действие фильтра сводится к тому, что правая часть второго равенства сравнивается с нулем, и разница используется для корректировки оценки емкости. Отметим, что необходимы хорошие оценки для настоящих и предыдущих состояний заряда элемента, получаемые, возможно, при помощи фильтра, оценивающего заряд. Для найденной емкости также можно учесть зависимость от температуры (и тому подобных параметров) при помощи введения вектора емкости, в котором на каждом шаге вычислений можно рассматривать соответствующий элемент.
Промышленная применимость
Таким образом, здесь описан способ одновременной оценки состояния и параметров элемента питания на примере различных примеров выполнения. В некоторых примерах реализации применяется один или несколько фильтров Кальмана. В некоторых примерах реализации используется один или несколько расширенных фильтров Кальмана. Далее, некоторые примеры включают в себя механизм, обеспечивающий сходимость величины, характеризующей уровень заряда элемента питания. Некоторые примеры содержат упрощенный фильтр параметров для оценивания сопротивления, в то время как в других вариантах используется упрощенный фильтр для оценивания общей емкости. Данное изобретение можно применять в широком диапазоне приложений и для различных гальванических элементов.
Описанный способ можно осуществить в виде процедур, выполняемых вычислительным устройством, а также в виде приборов, осуществляющих эти процедуры. Способ также может быть осуществлен в виде управляющей программы, содержащей в себе команды, записанные в носителе данных 52, например, на гибких дискетах, компакт-дисках, жестких дисках и т.п. Когда управляющая программа загружена и выполняется вычислительным устройством, вычислительное устройство становится прибором, способным осуществить данный способ. Настоящий способ можно также осуществить в виде управляющей программы, записанной на носителе данных, загруженной и/или выполняемой вычислительным устройством, либо посылаемой в виде сигнала данных 54, который может, например, представлять собой модулированную несущую волну, передаваемую через некоторую передающую среду, такую как электропроводка или кабель, оптоволоконный кабель, или при помощи электромагнитного излучения. Когда управляющая программа загружена и выполняется вычислительным устройством, вычислительное устройство становится прибором, способным реализовать данный способ. Если применяется универсальный микропроцессор, то сегменты управляющей программы изменяют структуру микропроцессора для того, чтобы создать особые логические схемы.
Надо принять во внимание то обстоятельство, что использование определенной последовательности при указании однотипных операций не предполагает четкого определения последовательности действий, за исключением случаев, когда это оговорено особо. Более того, значение «по крайней мере один из» будет соответствовать термину «один или несколько», если иное не указано специально.
Несмотря на то, что изобретение было описано на различных примерах выполнения, специалистам в данной области понятно, что в пределах объема охраны данного изобретения могут быть использованы различные модификации и могут использоваться эквиваленты отдельных частей изобретения. В дополнение отметим, что может быть предложено много модификаций, чтобы удовлетворить каждой отдельной ситуации или материалу, не выходя при этом за естественные рамки изобретения. Поэтому предполагается, что применение изобретения не ограничено отдельными примерами, описанными как лучший вариант осуществления изобретения. Наоборот, изобретение включает в себя все модификации, входящие в рамки прилагаемых пунктов формулы изобретения.
Изобретение относится к области электротехники. Способ оценки текущего состояния и текущих параметров системы гальванических элементов включает оценку величин, характеризующих состояние гальванического элемента при помощи фильтра состояний; оценку величин, характеризующих параметры гальванического элемента при помощи фильтра параметров, а также обмен информацией между фильтром состояния и фильтром параметров. Прибор, предназначенный для оценки текущего состояния и текущих параметров гальванического элемента, состоит из первого элемента, предназначенного для оценки величины, характеризующей состояние элемента питания, и второго элемента, предназначенного для оценки величины, характеризующей параметры элемента питания. Эти составные элементы связаны между собой для осуществления обмена информацией между ними. Технический результат - расширение области применения, повышение точности и упрощение определения параметров. 4 н. и 18 з.п. ф-лы, 1 табл., 2 ил.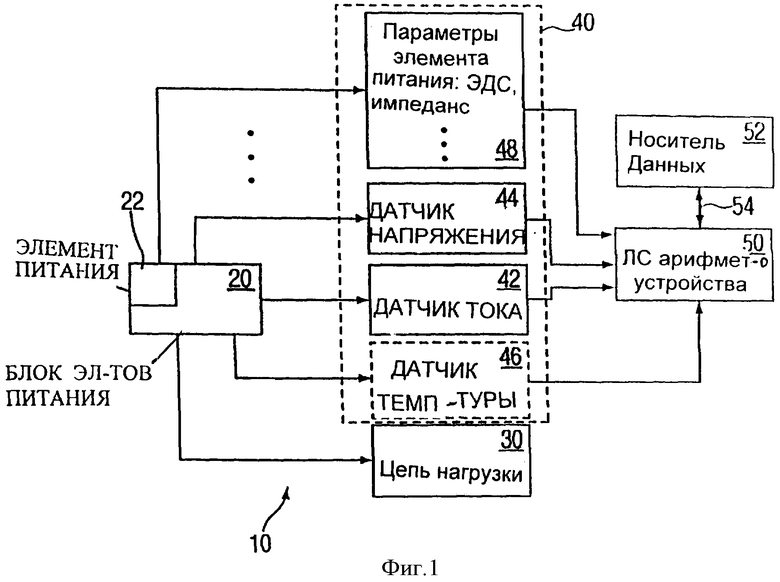
1. Способ оценки текущего состояния и текущих параметров системы гальванических элементов, включающий в себя:
оценку величин, характеризующих состояние гальванического элемента, при помощи фильтра состояния элемента для оценки вышеупомянутой величины состояния;
оценку величин, характеризующих параметры гальванического элемента, при помощи фильтра параметров элемента для оценки величины вышеупомянутого параметра
и обмен информацией между вышеупомянутым фильтром состояния элемента и упомянутым фильтром параметров элемента.
2. Способ по п.1, в котором упомянутый процесс оценивания величин, характеризующих состояние элемента, включает в себя:
выполнение предсказания внутреннего состояния вышеупомянутого элемента;
выполнение предсказания величины неопределенности вышеупомянутого предсказания внутреннего состояния;
корректировку вышеупомянутого предсказания внутреннего состояния и вышеупомянутого предсказания неопределенности и
применение алгоритма, который выполняет итерации вышеупомянутого выполнения предсказания внутреннего состояния, вышеупомянутого выполнения предсказания неопределенности и вышеупомянутой корректировки для получения текущей оценки вышеупомянутого состояния и текущей неопределенности вышеупомянутой оценки состояния.
3. Способ по п.2, в котором упомянутое предсказание внутреннего состояния включает в себя:
осуществление оценки параметров;
осуществление измерения тока;
осуществление измерения напряжения и
выполнение вышеупомянутого предсказания внутреннего состояния при использовании упомянутой оценки параметров, упомянутого измерения тока и упомянутого измерения напряжения в математической модели.
4. Способ по п.3, в котором упомянутое предсказание неопределенности включает в себя использование упомянутой оценки параметров и упомянутого измерения тока, и упомянутого измерения напряжения в математической модели для выполнения упомянутого предсказания.
5. Способ по п.4, в котором упомянутая корректировка включает в себя:
вычисление коэффициента усиления;
вычисление скорректированного предсказания внутреннего состояния при использовании упомянутого коэффициента усиления, упомянутого измерения напряжения и упомянутого предсказания внутреннего состояния и
вычисление скорректированного предсказания неопределенности при использовании упомянутого коэффициента усиления и упомянутого предсказания неопределенности.
6. Способ по п.5, в котором упомянутое применение алгоритма включает использование упомянутого скорректированного предсказания внутреннего состояния и упомянутого скорректированного предсказания неопределенности для получения предсказаний на следующем временном шаге, где упомянутый алгоритм повторяется.
7. Способ по п.6, в котором в качестве упомянутого алгоритма выступает по крайней мере один фильтр Кальмана и расширенный фильтр Кальмана.
8. Способ по п.7, в котором упомянутое внутреннее состояние включает по крайней мере одно из перечисленных: величина заряда, величина ЭДС поляризации и величина гистерезиса.
9. Способ по п.2, в котором упомянутое выполнение предсказания неопределенности также включает:
определение оценки параметра;
определение измерения тока;
определение измерения напряжения;
определение измерения температуры;
в котором вышеупомянутое выполнение предсказания неопределенности включает использование упомянутой оценки параметра, упомянутого измерения тока, упомянутого измерения напряжения и упомянутого измерения температуры в математической модели.
10. Способ по п.3, в котором упомянутая корректировка включает в себя:
вычисление коэффициента усиления;
вычисление скорректированного предсказания внутреннего состояния при использовании упомянутого коэффициента усиления, упомянутого измерения напряжения и упомянутого предсказания внутреннего состояния и
вычисление скорректированного предсказания неопределенности при помощи упомянутого коэффициента усиления и упомянутого предсказания неопределенности.
11. Способ по п.10, отличающийся тем, что упомянутое применение алгоритма включает использование упомянутого скорректированного предсказания внутреннего состояния и упомянутого скорректированного предсказания неопределенности для того, чтобы получить предсказания на следующем временном шаге, где упомянутый алгоритм повторяется.
12. Способ по п.1, в котором упомянутый процесс оценивания величины, характеризующей параметр элемента, включает в себя:
выполнение предсказания внутреннего параметра вышеупомянутого элемента;
выполнение предсказания величины неопределенности вышеупомянутого предсказания внутреннего параметра;
корректировку вышеупомянутого предсказания внутреннего параметра и вышеупомянутого предсказания неопределенности и применение алгоритма, который повторно выполняет упомянутое предсказание внутреннего параметра, упомянутое предсказание неопределенности и вышеупомянутую корректировку для того, чтобы получать текущую оценку указанного параметра и текущую неопределенность для упомянутой оценки параметра.
13. Способ по п.12, в котором упомянутый внутренний параметр включает в себя один или более из следующих: сопротивление, емкость, постоянная времени ЭДС поляризации, коэффициент усреднения ЭДС поляризации, коэффициент усреднения гистерезиса, константа скорости гистерезиса, а также коэффициент полезного действия.
14. Способ по п.1, в котором по крайней мере одна оценка из оценки параметра, оценки неопределенности, параметров, оценки состояния и оценки неопределенности состояния составляет ту информацию, обмен которой происходит между упомянутым фильтром состояний элемента и фильтром параметров элемента.
15. Прибор, сконфигурированный для оценивания текущего состояния и текущих параметров гальванического элемента, включает в себя:
первый составной элемент, сконфигурированный для определения величин, характеризующих состояние элемента питания;
второй составной элемент, сконфигурированный для оценки величин, характеризующей параметр элемента питания;
в котором первый и второй составные элементы связаны между собой для осуществления обмена информацией между ними.
16. Прибор по п.15, в котором упомянутый первый составной элемент, сконфигурированный для оценки величин, характеризующих состояние элемента питания, включает в себя:
элемент, сконфигурированный для выполнения предсказания внутреннего состояния вышеупомянутого элемента питания;
элемент, сконфигурированный для выполнения предсказания величины неопределенности вышеупомянутого предсказания внутреннего состояния;
элемент, сконфигурированный для корректирования вышеупомянутого предсказания внутреннего состояния и вышеупомянутого предсказания неопределенности; и
элемент, сконфигурированный для выполнения алгоритма, который повторяет шаги, выполненные упомянутым элементом для предсказания внутреннего состояния, упомянутым элементом для предсказания неопределенности и упомянутым элементом для корректирования для того, чтобы получать текущую оценку вышеупомянутого состояния и текущую неопределенность указанной оценки состояния.
17. Прибор по п.16, в котором упомянутый составной элемент, сконфигурированный для предсказания внутреннего состояния, включает в себя:
составной элемент, сконфигурированный для определения оценки параметра;
составной элемент, сконфигурированный для определения измерения тока;
составной элемент, сконфигурированный для определения измерения напряжения; и
составной элемент, сконфигурированный использовать упомянутую оценку параметра, упомянутое измерение тока и упомянутое измерение напряжения в математической модели для выполнения вышеупомянутого предсказания внутреннего состояния.
18. Прибор по п.17, в котором упомянутый составной элемент, сконфигурированный для предсказания неопределенности, включает в себя элемент, сконфигурированный для применения упомянутой оценки параметра, упомянутого измерения тока и упомянутого измерения напряжения в математической модели для выполнения упомянутого предсказания неопределенности.
19. Прибор по п.18, в котором упомянутый составной элемент, сконфигурированный для корректировки, включает в себя:
элемент, сконфигурированный для вычисления коэффициента усиления;
элемент, сконфигурированный для вычисления скорректированного предсказания внутреннего состояния при использовании упомянутого коэффициента усиления, упомянутого измерения напряжения и упомянутого предсказания внутреннего состояния;
и элемент, сконфигурированный для вычисления скорректированного предсказания неопределенности при использовании упомянутого коэффициента усиления и упомянутого предсказания неопределенности.
20. Прибор по п.19, в котором упомянутый элемент, сконфигурированный для выполнения алгоритма, включает в себя элемент, сконфигурированный для использования упомянутого скорректированного предсказания внутреннего состояния и упомянутого скорректированного предсказания неопределенности для того, чтобы получить предсказания на следующем временном шаге, где упомянутый алгоритм повторяется.
21. Система, предназначенная для оценивания текущих состояний и текущих параметров гальванического элемента, включает в себя:
средство для оценки состояния элемента питания, при помощи фильтра состояния элемента;
средство для оценки параметров гальванического элемента при помощи фильтра параметров элемента и
средство для обмена информацией между упомянутым фильтром состояния и упомянутым фильтром параметров.
22. Носитель данных, содержащий машинно-считываемую управляющую программу, где указанный носитель данных включает в себя команды, благодаря которым вычислительное устройство реализует способ оценки текущего состояния и текущих параметров гальванического элемента, который включает в себя:
оценку величин, характеризующих состояние гальванического элемента при помощи фильтра состояния;
оценку величин, характеризующих параметры гальванического элемента при помощи фильтра параметров;
обмен информацией между упомянутым фильтром состояния элемента и упомянутым фильтром параметров элемента.
| US 6661201 B1, 16.05.2000 | |||
| УСТРОЙСТВО ДЛЯ ЗАРЯДА НАКОПИТЕЛЯ ЭНЕРГИИ | 2002 |
|
RU2238608C2 |
| US 6618681 A, 09.09.2003 | |||
| Топчак-трактор для канатной вспашки | 1923 |
|
SU2002A1 |

