Ссылка на родственные заявки
Согласно настоящей заявке испрашивается приоритет в соответствии с предварительной заявкой на выдачу патента США №62/061,425 под названием «ATTITUDE FAULT DETECTION BASED ON AIR DATA AND AIRCRAFT CONTROL SETTINGS», которая подана 8 октября 2014 года и которая ссылкой полностью включена в настоящий документ.
Уровень техники
Одной из задач, решаемых при проектировании современного коммерческого воздушного судна, является устранение необходимости в наличии трех функционирующих высококлассных (т.е., обеспечивающих получение пригодных для использования в навигации данных) инерциальных измерительных блоков, совмещенных с блоками воздушных сигналов, которые предназначены для получения данных измерения пространственного положения воздушного судна. Существует необходимость в создании воздушного судна, которое содержит только два высококлассных инерциальных измерительных блока, а также третий блок, который может представлять собой низкоклассный инерциальный датчик, такой как микроэлектромеханический (МЭМ) инерциальный датчик. Вместе с этим желательно поддержание способности воздушного судна осуществлять взлет даже в том случае, когда один из двух высококлассных инерциальных измерительных блоков вышел из строя (например, по причине отказа инерциального датчика). Как таковые взлет и дальнейшее функционирование воздушного судна с двумя доступными источниками для получения данных измерения пространственного положения не является проблемой, но может возникнуть ситуация, когда во время полета качество данных, выдаваемых одним из двух оставшихся действующих инерциальных датчиков, ухудшается, при этом такой датчик начинает выдавать данные пространственного положения, которым присущ некоторый уровень систематической ошибки. В этом случае, когда летный экипаж замечает то, что два действующих инерциальных датчика выдают отличающиеся данные крена и/или тангажа, экипаж должен иметь возможность определить, какой из датчиков выдает точные данные измерения пространственного положения, а какой нет.
По вышеуказанным причинам, а также по другим причинам, которые указаны ниже и которые станут очевидными для специалистов в данной области техники при прочтении и понимании настоящего описания, в данной области техники существует необходимость в разработке альтернативных систем и способов обнаружения отказов при определении пространственного положения на основе воздушных сигналов и настроек управления воздушным судном.
Краткое описание чертежей
Для лучшего понимания вариантов осуществления настоящего изобретения, а также его применения и дополнительных преимуществ, рассмотрим описание предпочтительных вариантов осуществления, выполненное со ссылками на прилагаемые фигуры, где:
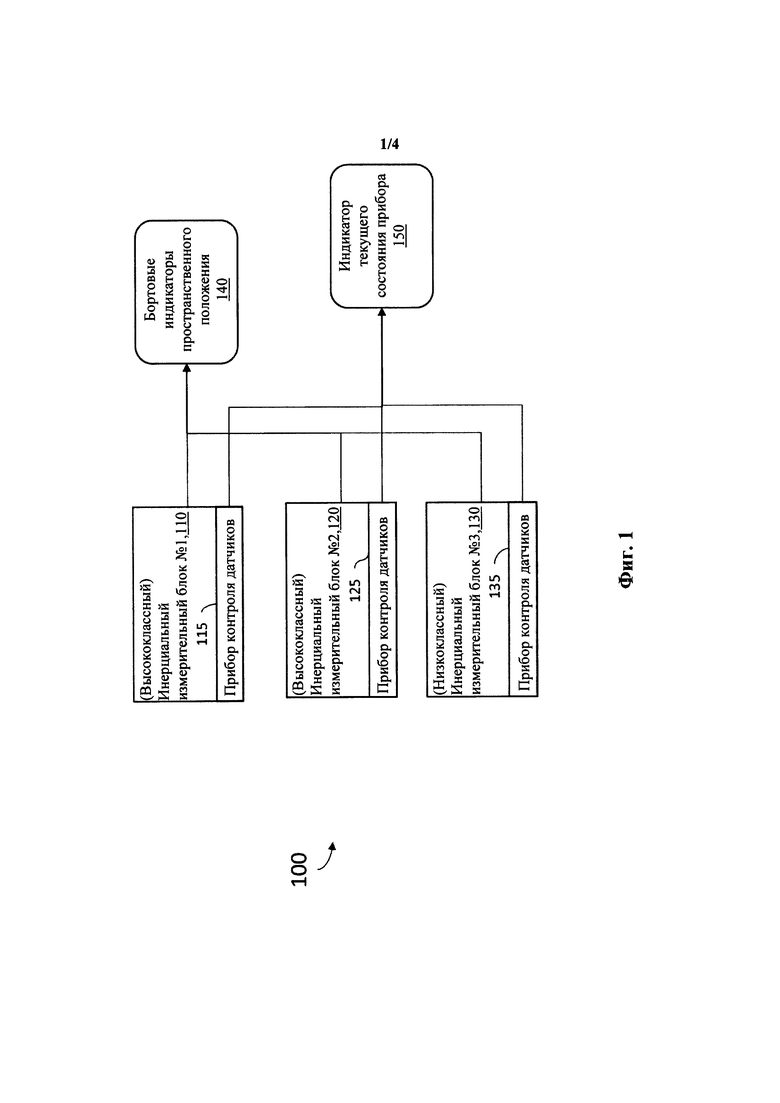
на фиг. 1 представлена схема, иллюстрирующая авиационную электронную систему для предоставления данных измерения пространственного положения воздушного судна согласно одному варианту осуществления настоящего изобретения;
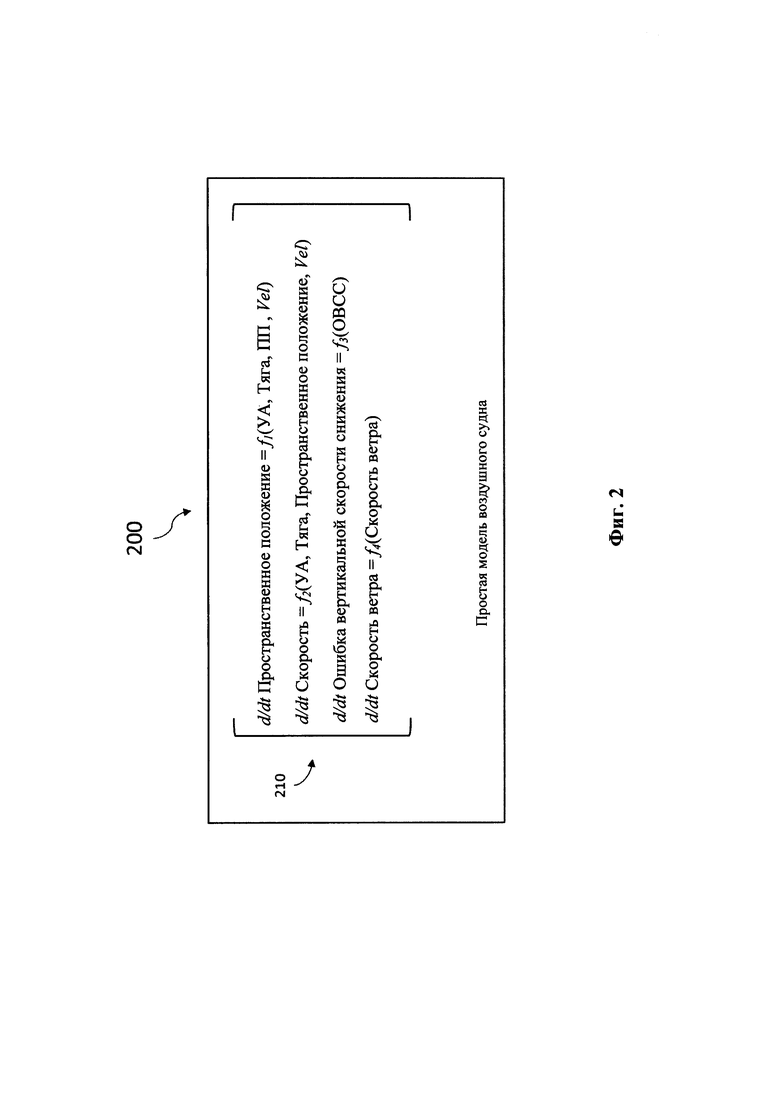
на фиг. 2 представлена схема, иллюстрирующая простую модель воздушного судна, используемую прибором контроля датчиков согласно одному варианту осуществления настоящего изобретения; и
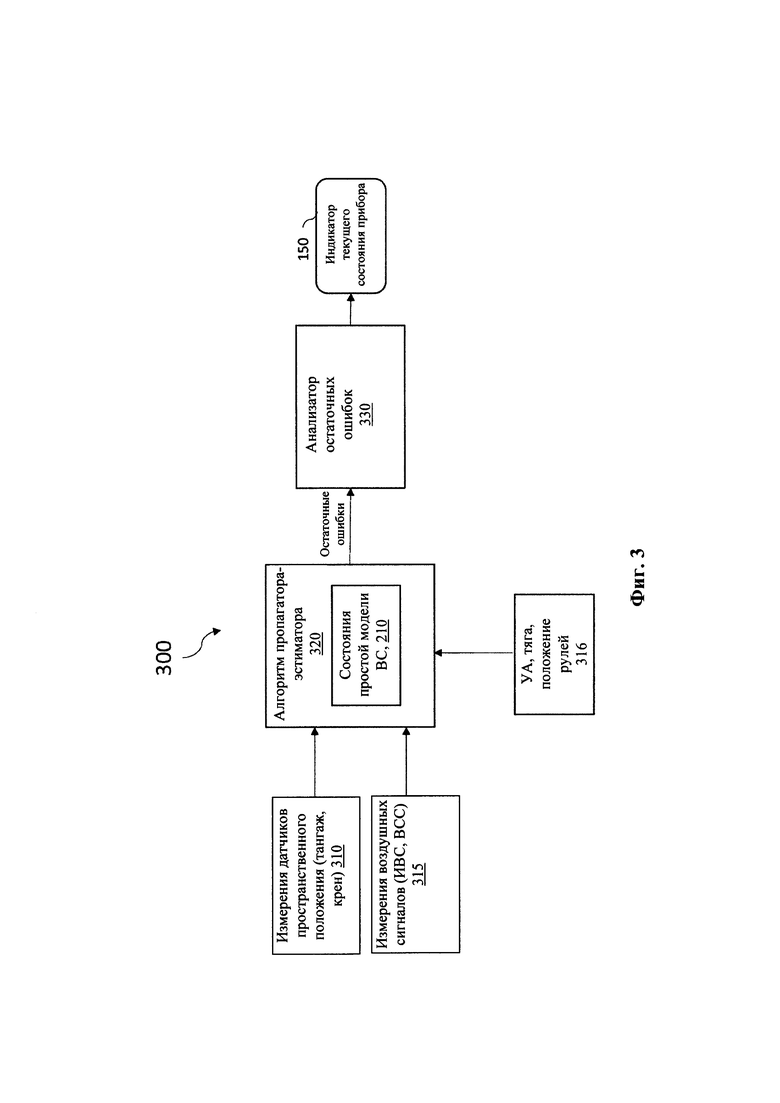
на фиг. 3 представлена схема, дополнительно иллюстрирующая прибор контроля датчиков согласно одному варианту осуществления настоящего изобретения; и
на фиг. 4 представлена блок-схема, иллюстрирующая способ согласно одному варианту осуществления настоящего изобретения.
В соответствии с общепринятой практикой различные описанные элементы изображены без соблюдения масштаба, и изображены таким образом, чтобы выделить элементы (признаки), относящиеся к настоящему изобретению. По всему описанию и на фигурах подобные позиции использованы для обозначения подобных элементов.
Сущность изобретения
Варианты осуществления настоящего изобретения предоставляют способы и системы для обнаружения отказов при определении пространственного положения и будут понятны после прочтения и изучения представленного ниже описания.
Предлагаются системы и способы обнаружения отказов при определении пространственного положения на основе воздушных сигналов и настроек управления воздушным судном. Согласно одному варианту осуществления прибор контроля датчиков для системы измерения пространственного положения воздушного судна содержит: модель воздушного судна, сконфигурированную для моделирования множества состояний, при этом множество состояний включает, по меньшей мере, состояние пространственного положения воздушного судна, состояние скорости воздушного судна, состояние ошибки вертикальной скорости снижения и состояние скорости ветра; пропагатор-эстиматор, сконфигурированный для использования множества состояний, смоделированных моделью воздушного судна, для обработки данных измерений воздушных сигналов и данных измерений пространственного положения от первого инерциального измерительного блока, входящего в состав системы измерения пространственного положения воздушного судна; и анализатор остаточных ошибок, сконфигурированный для получения значений остаточной ошибки, сгенерированных пропагатором-эстиматором, при этом анализатор остаточных ошибок выдает сигнал тревоги, когда значения остаточной ошибки превышают заданный статистический порог.
Подробное описание изобретения
В представленном ниже подробном раскрытии сделаны ссылки на прилагаемые фигуры, которые образуют его часть и на которых изображены конкретные иллюстративные варианты осуществления настоящего изобретения. Эти варианты осуществления описаны достаточно подробно для того, чтобы специалисты в данной области техники могли практически осуществить настоящее изобретение; при этом следует понимать, что могут быть использованы другие варианты осуществления, и что изменения логического характера, изменения механической конструкции и изменения электрической конфигурации могут быть выполнены без отступления от объема настоящего изобретения. Кроме того, следует отметить, что представленное ниже подробное раскрытие не следует рассматривать в качестве ограничения.
В предложенных вариантах осуществления, описанных в настоящем документе, использована простая модель динамики летательного аппарата для определения того, согласуется ли отображаемое пространственное положение (крен или тангаж), предоставляемое инерциальным датчиком, с другими измеренными или поддающимися количественному определению величинами, такими как истинная воздушная скорость (ИВС), скорость изменения барометрической высоты, угол атаки (УА), тяга и настройка рулей. Указанные параметры в сочетании с креном и тангажом образуют редундантную группу динамических параметров, и при попытке применения всех указанных параметров в простой модели в качестве данных измерений (или наблюдений) будет наблюдаться конфликт, если данные измерения крена и/или данные измерения тангажа будут иметь значительные отклонения. Этот конфликт будет выглядеть в качестве систематических погрешностей в остаточных ошибках измерений алгоритма пропагатора-эстиматора, и, так как они достигают уровня, который выходит за пределы неопределенности измеренных параметров относительно модели, устройство, предоставляющее данные тангажа и крена, признают вышедшим из строя. Алгоритм пропагатора-эстиматора может быть реализован с использованием фильтра Кальмана или эквивалента фильтра Кальмана. Пороги могут быть применены к остаточным ошибкам для того, чтобы ошибки определения пространственного положения, значения которых превышают заданные уровни, запускали выдачу предупреждения. Например, согласно одному варианту осуществления компонент, оценивающий остаточные ошибки из инерциального измерительного блока, может определить, имеется ли недопустимое отклонение угла крена (например, более 10 градусов) и/или недопустимое отклонение угла тангажа (например, более 5 градусов) для навигационного устройства. Когда две опорные системы определения пространственного положения выдают различные ответы, предложенные варианты осуществления могут проверить все доступные динамические входные параметры летательного аппарата и указать, какая из двух опорных систем определения пространственного положения выдает ошибку. Методы оценки динамического состояния, используемые в описанных в настоящем документе вариантах осуществления, распространяются не только на моделирование характерных для навигации параметров, таких как пространственное положение и скорость, но также параметров, связанных с моделями динамического состояния воздушного судна, таких как угол атаки, настройки рулей и/или положение рулей и текущий уровень тяги.
На фиг. 1 представлена схема, иллюстрирующая авиационную электронную систему 100, предназначенную для предоставления данных измерения пространственного положения воздушного судна (т.е. данных измерения тангажа и крена воздушного судна) летному экипажу воздушного судна. Указанная система содержит три инерциальных измерительных блока 110, 120 и 130. Согласно конкретному варианту осуществления, изображенному на фиг. 1, система 100 содержит первый высококлассный инерциальный измерительный блок (110) и второй высококлассный инерциальный измерительный блок (120), а также содержит низкоклассный инерциальный измерительный блок (130), который может быть реализован, например, при помощи MEM инерциального датчика. Однако система 100 не должна ограничиваться этой конкретной конфигурацией. Согласно другим вариантам осуществления все инерциальные измерительные блоки могут быть высококлассными блоками, низкоклассными блоками и/или блоками различных классов. Кроме того, согласно альтернативным вариантам осуществления, система 100 может содержать более или менее трех инерциальных измерительных блоков. Три инерциальных блока 110, 120 и 130 выдают данные на один или несколько бортовых индикаторов 140 пространственного положения, благодаря которым летный экипаж может получить данные измерения пространственного положения воздушного судна.
Как изображено на фиг. 1, согласно некоторым вариантам осуществления настоящего изобретения каждый из инерциальных измерительных блоков 110, 120 и 130 характеризуется наличием связанного с ним прибора контроля датчиков (указанные приборы обозначены соответственно позициями 115, 125 и 135), который идентифицирует поступление вызывающих сомнение данных пространственного положения, предоставляемых связанным с ним инерциальным датчиком, или отсутствие поступления данных, и генерирует предупреждение, которое отображается индикатором 150 текущего состояния прибора. Приборы 115, 125 и 135 контроля датчиков могут быть интегрированы в инерциальные измерительные блоки 110, 120 и 130, как показано на фиг. 1. Согласно другим вариантам осуществления приборы 115, 125 и 135 контроля датчиков могут быть реализованы отдельно от инерциальных измерительных блоков 110, 120 и 130. Например, согласно одному варианту осуществления приборы 115, 125 и 135 контроля датчиков могут быть реализованы в радиоэлектронном оборудовании, связанном с бортовыми индикаторами 140 пространственного положения или индикатором 150 текущего состояния прибора.
На фиг. 2 представлена схема, иллюстрирующая простую модель 200 воздушного судна, используемую одним из приборов 115, 125 или 135 контроля датчиков для математического моделирования упрощенной подгруппы состояний воздушного судна (отмеченных позицией 210), имеющих отношение к определению пространственного положения. Здесь пространственное положение является любым выбранным представлением пространственного положения, таким как четырехкомпонентный кватернион, девятикомпонентная ортонормированная матрица или три угла Эйлера, Vel является трехкомпонентным вектором скорости, d/dt является производной по времени и  ,
,  ,
,  ,
,  являются (векторными) функциями. Ошибка вертикальной скорости снижения и скорость ветра представляют стохастические процессы и, следовательно, могут характеризоваться множеством состояний моделирования. Типичные процессы, которые могут быть использованы для них, являются гауссовскими марковскими процессами 1-го и 2-го порядков. Эти процессы добавили для того, чтобы представить неопределенность в изменении скорости ветра и барометрической вертикальной скорости снижения. Когда блок инерциальных датчиков точно выдает данные измерений тангажа и крена, то отображаемые данные тангажа и крена, поступающие из этого блока инерциальных датчиков; должны соответствовать оценкам состояний, производимым моделью 200 воздушного судна. Например, если воздушное судно имеет крен «х» градусов, то воздушное судно должно испытывать соответствующую степень перегрузки (наблюдаемую на основе данных угла атаки) или должно терять высоту (т.е. иметь вертикальную скорость снижения, наблюдаемую на основе данных барометрического высотомера).
являются (векторными) функциями. Ошибка вертикальной скорости снижения и скорость ветра представляют стохастические процессы и, следовательно, могут характеризоваться множеством состояний моделирования. Типичные процессы, которые могут быть использованы для них, являются гауссовскими марковскими процессами 1-го и 2-го порядков. Эти процессы добавили для того, чтобы представить неопределенность в изменении скорости ветра и барометрической вертикальной скорости снижения. Когда блок инерциальных датчиков точно выдает данные измерений тангажа и крена, то отображаемые данные тангажа и крена, поступающие из этого блока инерциальных датчиков; должны соответствовать оценкам состояний, производимым моделью 200 воздушного судна. Например, если воздушное судно имеет крен «х» градусов, то воздушное судно должно испытывать соответствующую степень перегрузки (наблюдаемую на основе данных угла атаки) или должно терять высоту (т.е. иметь вертикальную скорость снижения, наблюдаемую на основе данных барометрического высотомера).
Как показано на фиг. 2, изменения в пространственном положении воздушного судна моделируют при помощи производной по времени первого вектора состояния «d/dt Пространственное положение», которая вычисляется моделью 200 как функция текущего значения тяги, положения рулей и угла атаки воздушного судна, а также состояний скорости и состояний пространственного положения. Согласно некоторым вариантам осуществления настройку рулей могут не использовать при расчетах. Текущие значения тяги, угла атаки и настроек рулей могут быть получены от других систем и датчиков воздушного судна. Производная по времени второго вектора состояния «d/dt Скорость» также вычисляется моделью 200 как функция текущего значения тяги, положения рулей, угла атаки, пространственного положения и скорости воздушного судна. Третья переменная состояния, именуемая «Ошибкой вертикальной скорости снижения», представляет неопределенность в измеренной барометрической вертикальной скорости снижения. Следует отметить, что данные измерений высотомера, полученные от барометрического высотомера (блока воздушных сигналов) воздушного судна, не являются идеальными геометрическими показателями высоты воздушного судна, однако они будут также изменяться в зависимости от условий окружающей среды, таких как изменения температуры воздуха и локального давления воздуха. В связи с этим полученные данные барометрической вертикальной скорости снижения включают измерение скорости, которое приблизительно представляет действительные геометрические изменения высоты воздушного судна, и ошибку в этом измерении моделируют при помощи вектора состояния «Ошибка вертикальной скорости снижения». Производная четвертого вектора состояния «Скорость ветра» является оценкой скорости ветра, представляющей ошибку в измеренной истинной воздушной скорости, полученной от датчиков воздушного судна (блока воздушных сигналов).
На фиг. 3 представлена схема, дополнительно иллюстрирующая прибор 300 контроля датчиков, который может функционировать в качестве любого из приборов 115, 125, 135 контроля датчиков, представленных на фиг. 1. В приборе 300 контроля датчиков упрощенную модель 200 воздушного судна используют для распространения состояний 210, используемых алгоритмом 320 пропагатора-эстиматора. Для некоторых вариантов осуществления алгоритм 320 пропагатора-эстиматора может быть реализован при помощи фильтра Кальмана или эквивалентного алгоритма пропагатора-эстиматора. Алгоритм 320 пропагатора-эстиматора реализует алгоритмы предиктора состояний и обновления состояний. Иначе говоря, алгоритм 320 пропагатора-эстиматора прогнозирует, какие из значений будущей группы состояний 210 должны основываться на текущих значениях состояний 210 посредством упрощенной модели 200 воздушного судна. Текущие значения могут быть определены, например, на основе данных УА, тяги и положения рулей (см. блок 316), как рассмотрено ранее. Затем алгоритм 320 пропагатора-эстиматора обновляет состояния собственных фильтров путем сравнение указанного прогноза с текущими данными 310 измерений датчиков пространственного положения и данными 315 измерений воздушных сигналов, при этом учитываются любые ошибки, которые могут обычно ожидаться в этих данных из-за шумов, допустимых отклонений в работе оборудования и условий окружающей среды. Любые различия данных измерений и прогнозов измерений на основе обновленных состояний алгоритма 320 пропагатора-эстиматора дают отклонение, именуемое остаточной ошибкой. Если остаточная ошибка является небольшой, то алгоритм 320 пропагатора-эстиматора предпримет попытку скорректировать указанную ошибку путем учета остаточной ошибки (или, по меньшей мере, некоторой ее части) в своей следующей итерации прогнозируемых значений состояний 210. Если было выполнено согласование источника этой начальной остаточной ошибки, то дальнейшие остаточные ошибки, вычисленные из последующих итераций прогнозируемых значений, должны быть меньше начальной остаточной ошибки.
Однако если существует систематическая проблема с применяемыми данными измерений, большие остаточные ошибки будут продолжать возникать, превышая любые ожидаемые отклонения, что иначе могло бы быть отнесено к шумам в данных (например, из-за изменений ветра или изменений локального давления), которые находятся в пределах ожидаемых границ распределения ошибок. Следовательно, прибор 300 контроля датчиков дополнительно содержит анализатор 330 остаточных ошибок. Если анализатор 330 остаточных ошибок определяет то, что некоторая остаточная ошибка, выдаваемая фильтрами Кальмана 320, выходит за пределы некоторого заданного статистического порога (например, больше некоторого Kσ для заданного K и стандартного отклонения σ), то существует несогласованность между моделью 200 и данными измерения 310 инерциального датчика пространственного положения, которая указывает на то, что инерциальный измерительный блок, предоставляющий данные измерения 310 датчика пространственного положения, вышел из строя или в его работе произошел отказ. На этой стадии прибор 300 контроля датчиков выдает сигнал, который генерирует предупреждение, отображаемое на индикаторе 150 текущего состояния прибора. Например, если прибор 115 контроля датчиков для (высококлассного) инерциального измерительного блока №1 110 обнаруживает отказ, то он выдает предупреждение, отображаемое на индикаторе 150 текущего состояния прибора, такое как «Отказ инерциального блока №1 при определении пространственного положения». Если прибор 125 контроля датчиков для (высококлассного) инерциального измерительного блока №2 120 обнаруживает отказ, то он выдает предупреждение, отображаемое на индикаторе 150 текущего состояния прибора, такое как «Отказ инерциального блока №2 при определении пространственного положения». Аналогично, если прибор 135 контроля датчиков для (низкоклассного) инерциального измерительного блока №3 130 обнаруживает отказ, то он выдает предупреждение, отображаемое на индикаторе 150 текущего состояния прибора, такое как «Отказ инерциального блока №3 при определении пространственного положения». Таким образом, летный экипаж будет проинформирован о частичной работоспособности вышедшего из строя инерциального измерительного блока (блоков) и будет полагаться на данные измерения пространственное положения, поступающие от оставшегося блока, в течение остальной части полета. Следует отметить, что ошибочные данные пространственного положения по крену или тангажу могут служить в качестве основания для игнорирования всех данных пространственного положения, поступающих от неисправного инерциального измерительного блока.
На фиг. 4 представлена схема, иллюстрирующая способ 400 согласно одному варианту осуществления настоящего изобретения. Согласно некоторым вариантам осуществления способ 400 может быть использован для реализацию любого из вариантов осуществления, описанных со ссылками на фиг. 1-3. Способ начинается со стадии 410, на которой осуществляют мониторинг данных решения пространственного положения, генерируемых первым инерциальным измерительным блоком, входящим в состав системы измерения пространственного положения воздушного судна. Согласно одному варианту осуществления система измерения пространственного положения воздушного судна может содержать группу инерциальных измерительных блоков, например, три инерциальных измерительных блока 110, 120 и 130, изображенных на фиг. 1. Согласно одному варианту осуществления указанная система содержит первый высококлассный инерциальный измерительный блок и второй высококлассный инерциальный измерительный блок, а также дополнительно содержит низкоклассный инерциальный измерительный блок, который может быть реализован, например, при помощи МЭМ инерциального датчика. Однако следует понимать, что система измерения пространственного положения воздушного судна не ограничена этой конкретной конфигурацией. Согласно другим вариантам осуществления все инерциальные измерительные блоки могут быть высококлассными блоками; низкоклассными блоками и/или блоками различных классов. Кроме того, согласно альтернативным вариантам осуществления способ 400 может быть реализован в системе, которая содержит более или менее трех инерциальных измерительных блоков. Каждый из инерциальных измерительных блоков сконфигурирован для выдачи данных на один или несколько бортовых индикаторов пространственного положения, благодаря которым летный экипаж может получить данные измерения пространственного положения воздушного судна.
Далее способ переходит к стадии 420, на которой осуществляют выполнение пропагатора-эстиматора, сконфигурированного с моделью воздушного судна, для множества состояний воздушного судна на основе вектора состояния пространственного положения воздушного судна, вектора состояния скорости, вектора состояния ошибки вертикальной скорости снижения и вектора состояния скорости ветра. Согласно одному варианту осуществления модель воздушного судна реализована с использованием простой модели 200 воздушного судна, описанной выше со ссылкой на фиг. 2. Производная по времени вектора пространственного положения «d/dt Пространственное положение» может быть вычислена как функция текущей тяги, положений рулей, угла атаки, скорости и пространственного положения воздушного судна. Текущие значения тяги, угла атаки и настройки рулей могут быть получены от других систем и датчиков воздушного судна. Производная по времени второго вектора состояния «d/dt Скорость» также вычисляется моделью воздушного судна как функция текущего значения тяги, положения рулей, угла атаки, пространственного положения и скорости воздушного судна. Третья переменная состояния, именуемая «Ошибкой вертикальной скорости снижения», представляет неопределенность в измеренной барометрической вертикальной скорости снижения. Следует отметить, что данные измерений высотомера, полученные от барометрического высотомера (блока воздушных сигналов) воздушного судна, не являются идеальными геометрическими показателями высоты воздушного судна, однако они будут также изменяться в зависимости от условий окружающей среды, таких как изменение температуры воздуха и локального давления воздуха. В связи с этим полученные данные барометрической вертикальной скорости снижения включают измерение скорости, которое приблизительно представляет действительные геометрические изменения высоты воздушного судна, и ошибку в этом измерении моделируют при помощи вектора состояния «Ошибка вертикальной скорости снижения». Производная четвертого вектора состояния «Скорость ветра» является оценкой скорости ветра, представляющей ошибку в измеренной истинной воздушной скорости, полученной от датчиков воздушного судна (блока воздушных сигналов). Пропагатор-эстиматор может быть реализован при помощи фильтра Кальмана или некоторого его варианта или эквивалента. Затем способ переходит к стадии 430, на которой осуществляют генерирование остаточных значений ошибки измерения при помощи пропагатора-эстиматора, при этом пропагатор-эстиматор сконфигурирован таким образом, чтобы итерационно прогнозировать и обновлять множество состояний воздушного судна из модели воздушного судна.
Далее способ переходит к стадии 440, на которой сравнивают остаточные значения ошибки измерения с заданным статистическим порогом и генерируют сигнал тревоги, когда остаточные значения ошибки измерения превышают заданный статистический порог. Если существует систематическая проблема с инерциальными данными, генерируемыми первым инерциальным измерительным блоком, мониторинг которого осуществляется, и, в частности, данными тангажа или крена, большие остаточные ошибки будут продолжать возникать, превышая любые ожидаемые отклонения, что иначе могло бы быть отнесено к шумам в данных. Остаточные значения ошибки измерения будут соответственно выходить за пределы ожидаемых границ распределения ошибок, указывая на то, что существует несогласованность между моделью воздушного судна и измерениями инерциального датчика пространственного положения. Несогласованность между моделью воздушного судна и измерениями инерциального датчика пространственного положения указывает на до, что инерциальный измерительный блок, предоставляющий данные измерения датчика пространственного положения, вышел из строя или в его работе произошел отказ. Согласно одному варианту осуществления генерирование сигнала тревоги реализуется прибором 300 контроля датчиков путем подачи сигнала тревоги посредством предупреждения, отображаемого на индикаторе 150 текущего состояния прибора.
Примеры вариантов осуществления изобретения
Пример 1 включает прибор контроля датчиков для системы измерения пространственного положения воздушного судна, при этом прибор контроля датчиков содержит: модель воздушного судна, сконфигурированную для моделирования множества состояний, при этом множество состояний включает, по меньшей мере, состояние пространственного положения воздушного судна, состояние скорости воздушного судна, состояние ошибки вертикальной скорости снижения и состояние скорости ветра; пропагатор-эстиматор, сконфигурированный для использования множества состояний, смоделированных моделью воздушного судна, для обработки данных измерений воздушных сигналов и данных измерений пространственного положения от первого инерциального измерительного блока, входящего в состав системы измерения пространственного положения воздушного судна; и анализатор остаточных ошибок, сконфигурированный для получения значений остаточной ошибки, сгенерированных пропагатором-эстиматором, при этом анализатор остаточных ошибок выдает сигнал тревоги, когда значения остаточной Ошибки превышают заданный статистический порог.
Пример 2 включает прибор контроля датчиков, раскрытый в примере 1, при этом производная по времени состояния скорости воздушного судна вычислена как функция одного или более из угла атаки, настроек рулей, настройки тяги, пространственного положения и скорости воздушного судна.
Пример 3 включает прибор контроля датчиков, раскрытый в любом из примеров 1-2, при этом производная по времени состояния ошибки вертикальной скорости снижения вычислена как функция данных измерения барометрического высотомера.
Пример 4 включает прибор контроля датчиков, раскрытый в примере 3, при этом состояние (или состояния) ошибки вертикальной скорости снижения определяет (определяют) стохастический процесс, представляющий ошибку в измерении вертикальной скорости снижения.
Пример 5 включает прибор контроля датчиков, раскрытый в любом из примеров 1-4, при этом производная по времени состояния скорости ветра вычислена как функция истинной воздушной скорости, полученной из данных датчика воздушного судна.
Пример 6 включает прибор контроля датчиков, раскрытый в примере 5, при этом состояние (или состояния) скорости ветра определяет (определяют) стохастический процесс, представляющий ошибку в измерении истинной воздушной скорости.
Пример 7 включает прибор контроля датчиков, раскрытый в любом из примеров 1-6, при этом указанный сигнал тревоги генерирует отображение индикатором предупреждения, которое указывает на то, что произошел отказ первого инерциального измерительного блока.
Пример 8 включает прибор контроля датчиков, раскрытый в любом из примеров 1-7, при этом прибор контроля датчиков встроен в первый инерциальный измерительный блок.
Пример 9 включает систему обнаружения отказов для системы измерения пространственного положения воздушного судна, при этом система обнаружения отказов содержит: прибор контроля датчиков, соединенный с первым инерциальным измерительным блоком, входящим в состав системы измерения пространственного положения воздушного судна, причем прибор контроля датчиков содержит: модель воздушного судна, при этом модель воздушного судна сконфигурирована для моделирования множества состояний воздушного судна, причем множество состояний воздушного судна включает, по меньшей мере, состояние пространственного положения воздушного судна, состояние скорости воздушного судна, состояние ошибки вертикальной скорости снижения и состояние скорости ветра; пропагатор-эстиматор, сконфигурированный для распространения и обновления множества состояний воздушного судна из модели воздушного судна на основе данных измерения воздушных сигналов и данных измерения пространственного положения из первого инерциального измерительного блока; и анализатор остаточных ошибок, соединенный с пропагатором-эстиматором и сконфигурированный для получения остаточных значений ошибки измерения, генерируемых пропагатором-эстиматором, при этом анализатор остаточных ошибок выдает сигнал тревоги, когда остаточные значения ошибки измерения превышают заданный статистический порог.
Пример 10 включает систему обнаружения отказов, раскрытую в примере 9, при этом прибор контроля датчиков встроен в первый инерциальный измерительный блок.
Пример 11 включает систему обнаружения отказов, раскрытую в любом из примеров 9-10, при этом пропагатор-эстиматор является фильтром Кальмана.
Пример 12 включает систему обнаружения отказов, раскрытую в любом из примеров 9-11, при этом он дополнительно содержит индикатор; причем сигнал тревоги генерирует отображение индикатором предупреждения, которое указывает на то, что произошел отказ первого инерциального измерительного блока.
Пример 13 включает систему обнаружения отказов, раскрытую в любом из примеров 9-12, при этом состояние пространственного положения воздушного судна включает одно или оба из угла тангажа воздушного судна и угла крена воздушного судна.
Пример 14 включает систему обнаружения отказов, раскрытую в любом из примеров 9-13, при этом производная по времени состояния пространственного положения воздушного судна вычислена как функция одного или более из угла атаки, настроек рулей, настройки тяги, пространственного положения и скорости воздушного судна; производная по времени состояния скорости воздушного судна вычислена как функция одного или более из угла атаки, настроек рулей, настройки тяга, пространственного положения и скорости воздушного судна; производная по времени состояния ошибки вертикальной скорости снижения вычислена как функция данных измерения барометрического высотомера; и производная по времени состояния скорости ветра вычислена как функция истинной воздушной скорости, полученной из данных датчика воздушного судна.
Пример 15 включает способ обнаружения отказов для системы измерения пространственного положения воздушного судна, при этом способ предусматривает: мониторинг данных решения пространственного положения, генерируемых первым инерциальным измерительным блоком, входящим в состав системы измерения пространственного положения воздушного судна; выполнение пропагатора-эстиматора, сконфигурированного с моделью воздушного судна, для множества состояний воздушного судна на основе вектора состояния пространственного положения воздушного судна, вектора состояния скорости, вектора состояния ошибки вертикальной скорости снижения и вектора состояния скорости ветра; генерирование остаточных значений ошибки измерения при помощи пропагатора-эстиматора, при этом пропагатор-эстиматор сконфигурирован для итерационного прогнозирования и обновления множества состояний воздушного судна из модели воздушного судна; и сравнение остаточных значений ошибки измерения с заданным статистическим порогом и генерирование сигнала тревоги, когда остаточные значения ошибки измерения превышают заданный статистический порог.
Пример 16 включает способ, раскрытый в примере 15, при этом пропагатор-эстиматор является фильтром Кальмана.
Пример 17 включает способ, раскрытый в любом из примеров 15-16, при этом сигнал тревоги генерирует отображение индикатором предупреждения, которое указывает на то, что произошел отказ первого инерциального измерительного блока.
Пример 18 включает способ, раскрытый в любом из примеров 15-17, при этом производная по времени состояния пространственного положения воздушного судна вычислена как функция одного или более из угла атаки, настроек рулей, настройки тяги, пространственного положения и скорости воздушного судна; производную по времени вектора состояния скорости воздушного судна вычисляют как функцию одного или более из угла атаки, настроек рулей, настройки тяги, пространственного положения и скорости воздушного судна; производную по времени вектора состояния ошибки вертикальной скорости снижения вычисляют как функцию данных измерения барометрического высотомера; и производную по времени вектора состояния скорости ветра вычисляют как функцию истинной воздушной скорости, полученной из данных датчика воздушного судна.
Пример 19 включает способ, раскрытый в примере 18, при этом вектор состояния скорости ветра определяет стохастический процесс, представляющий ошибку в измерении истинной воздушной скорости; и вектор состояния ошибки вертикальной скорости снижения определяет стохастический процесс, представляющий ошибку в измерении вертикальной скорости снижения.
Пример 20 включает способ, раскрытый в любом из примеров 15-19, при этом вектор состояния пространственного положения воздушного судна включает одно или оба из угла тангажа воздушного судна и угла крена воздушного судна.
Хотя в настоящем документе были проиллюстрированы и описаны конкретные варианты осуществления настоящего изобретения, специалистам в данной области техники будет очевидно, что любая компоновка, рассчитанная для достижения этой же цели, может быть использована вместо показанных конкретных вариантов осуществления. Согласно задумке авторов настоящая заявка охватывает любые адаптации и варианты настоящего изобретения. Следовательно, предполагается, что настоящее изобретение ограничивается только формулой изобретения, а также ее эквивалентами.
| название | год | авторы | номер документа |
|---|---|---|---|
| НАВИГАЦИОННЫЙ КОМПЛЕКС | 2012 |
|
RU2483280C1 |
| Комплексный способ навигации летательных аппаратов | 2016 |
|
RU2646957C1 |
| БОРТОВАЯ ИНТЕГРИРОВАННАЯ СИСТЕМА ИНФОРМАЦИОННОЙ ПОДДЕРЖКИ ЭКИПАЖА И КОГНИТИВНЫЙ ФОРМАТ ПРЕДСТАВЛЕНИЯ ПОЛЕТНОЙ ИНФОРМАЦИИ НА ЭТАПЕ "ВЗЛЕТ" МНОГОДВИГАТЕЛЬНОГО ВОЗДУШНОГО СУДНА | 2013 |
|
RU2550887C2 |
| Малогабаритный навигационный комплекс | 2016 |
|
RU2644632C1 |
| Интеллектуальная система поддержки экипажа летательного аппарата | 2024 |
|
RU2839176C1 |
| ИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА ПОДДЕРЖКИ ЭКИПАЖА | 2013 |
|
RU2541902C2 |
| ИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА ПОДДЕРЖКИ ЭКИПАЖА | 2015 |
|
RU2598130C1 |
| ОПРЕДЕЛЕНИЕ КУРСА ДЛЯ ГИБРИДНОГО НАВИГАЦИОННОГО РЕШЕНИЯ НА ОСНОВЕ МАГНИТНО-ОТКАЛИБРОВАННЫХ ИЗМЕРЕНИЙ | 2015 |
|
RU2673504C2 |
| СИСТЕМА И СПОСОБ ЛОКАЛИЗАЦИИ ОТКАЗОВ ПРИ ОПРЕДЕЛЕНИИ УГЛОВОГО ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ ВОЗДУШНОГО СУДНА | 2015 |
|
RU2692743C2 |
| ИНТЕГРИРОВАННЫЙ КОМПЛЕКС НАВИГАЦИИ И УПРАВЛЕНИЯ ДВИЖЕНИЕМ ДЛЯ АВТОНОМНЫХ НЕОБИТАЕМЫХ ПОДВОДНЫХ АППАРАТОВ | 2011 |
|
RU2483327C2 |

Группа изобретений относится к прибору контроля датчиков для системы измерения пространственного положения воздушного судна, системе и способу обнаружения отказов для системы измерения пространственного положения. Прибор контроля датчиков содержит модель воздушного судна для моделирования множества состояний, пропагатор-эстиматор, анализатор остаточных ошибок. Система обнаружения отказов содержит прибор контроля датчиков. Способ обнаружения отказов включает мониторинг сгенерированных данных решения пространственного положения, выполнение пропагатора-эстиматора, сконфигурированного с моделью воздушного судна, генерирование остаточных значений ошибки измерения при помощи пропагатора-эстиматора, сравнение остаточных значений ошибки измерения с заданным статистическим порогом и генерирование сигнала тревоги, когда остаточные значения ошибки измерения превышают заданный статистический порог. Обеспечивается повышение точности обнаружения отказов датчиков при определении пространственного положения воздушного судна. 3 н. и 17 з.п. ф-лы, 4 ил.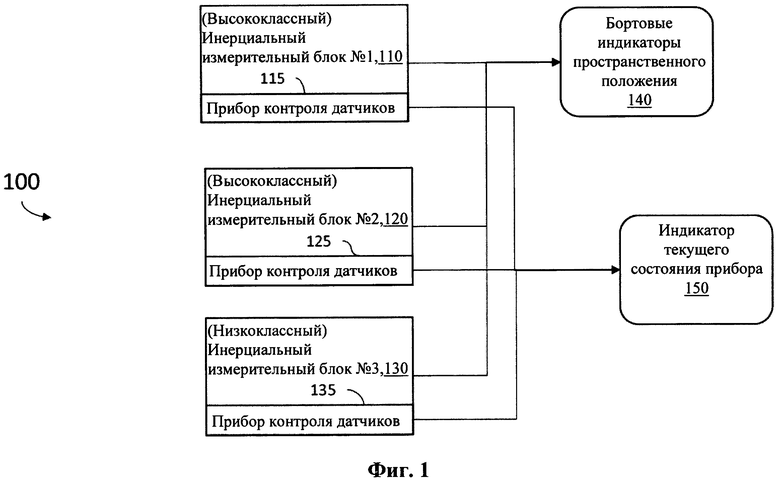
1. Прибор контроля датчиков для системы измерения пространственного положения воздушного судна, при этом прибор контроля датчиков содержит:
модель воздушного судна, сконфигурированную для моделирования множества состояний, при этом множество состояний включает, по меньшей мере, состояние пространственного положения воздушного судна, состояние скорости воздушного судна, состояние ошибки вертикальной скорости снижения и состояние скорости ветра;
пропагатор-эстиматор, сконфигурированный для использования множества состояний, смоделированных моделью воздушного судна, для обработки данных измерений воздушных сигналов и данных измерений пространственного положения из первого инерциального измерительного блока, входящего в состав системы измерения пространственного положения воздушного судна; и
анализатор остаточных ошибок, сконфигурированный для получения значений остаточной ошибки, сгенерированных пропагатором-эстиматором, при этом анализатор остаточных ошибок выдает сигнал тревоги, когда значения остаточной ошибки превышают заданный статистический порог.
2. Прибор контроля датчиков по п. 1, отличающийся тем, что производная по времени состояния скорости воздушного судна вычислена как функция одного или более из угла атаки, настроек рулей, настройки тяги, пространственного положения и скорости воздушного судна.
3. Прибор контроля датчиков по п. 1, отличающийся тем, что производная по времени состояния ошибки вертикальной скорости снижения вычислена как функция данных измерения барометрического высотомера.
4. Прибор контроля датчиков по п. 3, отличающийся тем, что состояние ошибки вертикальной скорости снижения определяет стохастический процесс, представляющий ошибку в измерении вертикальной скорости снижения.
5. Прибор контроля датчиков по п. 1, отличающийся тем, что производная по времени состояния скорости ветра вычислена как функция истинной воздушной скорости, полученной из данных датчика воздушного судна.
6. Прибор контроля датчиков по п. 5, отличающийся тем, что состояние скорости ветра определяет стохастический процесс, представляющий ошибку в измерении истинной воздушной скорости.
7. Прибор контроля датчиков по п. 1, отличающийся тем, что указанный сигнал тревоги генерирует отображение индикатором предупреждения, которое указывает на то, что произошел отказ первого инерциального измерительного блока.
8. Прибор контроля датчиков по п. 1, отличающийся тем, что прибор контроля датчиков встроен в первый инерциальный измерительный блок.
9. Система обнаружения отказов для системы измерения пространственного положения воздушного судна, при этом система обнаружения отказов содержит:
прибор контроля датчиков, соединенный с первым инерциальным измерительным блоком, входящим в состав системы измерения пространственного положения воздушного судна, при этом прибор контроля датчиков содержит:
модель воздушного судна, при этом модель воздушного судна сконфигурирована для моделирования множества состояний воздушного судна, причем множество состояний воздушного судна включает, по меньшей мере, состояние пространственного положения воздушного судна, состояние скорости воздушного судна, состояние ошибки вертикальной скорости снижения и состояние скорости ветра;
пропагатор-эстиматор, сконфигурированный для распространения и обновления множества состояний воздушного судна из модели воздушного судна на основе данных измерения воздушных сигналов и данных измерения пространственного положения из первого инерциального измерительного блока; и
анализатор остаточных ошибок, соединенный с пропагатором-эстиматором и сконфигурированный для получения остаточных значений ошибки измерения, генерируемых пропагатором-эстиматором, при этом анализатор остаточных ошибок выдает сигнал тревоги, когда остаточные значения ошибки измерения превышают заданный статистический порог.
10. Система обнаружения отказов по п. 9, отличающаяся тем, что прибор контроля датчиков встроен в первый инерциальный измерительный блок.
11. Система обнаружения отказов по п. 9, отличающаяся тем, что пропагатор-эстиматор является фильтром Кальмана.
12. Система обнаружения отказов по п. 9, отличающаяся тем, что дополнительно содержит индикатор;
при этом сигнал тревоги генерирует отображение индикатором предупреждения, которое указывает на то, что произошел отказ первого инерциального измерительного блока.
13. Система обнаружения отказов по п. 9, отличающаяся тем, что состояние пространственного положения воздушного судна включает одно или оба из угла тангажа воздушного судна и угла крена воздушного судна.
14. Система обнаружения отказов по п. 9, отличающаяся тем, что производная по времени состояния пространственного положения воздушного судна вычислена как функция одного или более из угла атаки, настроек рулей, настройки тяги, пространственного положения и скорости воздушного судна;
производная по времени состояния скорости воздушного судна вычислена как функция одного или более из угла атаки, настроек рулей, настройки тяги, пространственного положения и скорости воздушного судна;
производная по времени состояния ошибки вертикальной скорости снижения вычислена как функция данных измерения барометрического высотомера; и
производная по времени состояния скорости ветра вычислена как функция истинной воздушной скорости, полученной из данных датчика воздушного судна.
15. Способ обнаружения отказов для системы измерения пространственного положения воздушного судна, включающий:
мониторинг данных решения пространственного положения, генерируемых первым инерциальным измерительным блоком, входящим в состав системы измерения пространственного положения воздушного судна;
выполнение пропагатора-эстиматора, сконфигурированного с моделью воздушного судна, для множества состояний воздушного судна на основе вектора состояния пространственного положения воздушного судна, вектора состояния скорости, вектора состояния ошибки вертикальной скорости снижения и вектора состояния скорости ветра;
генерирование остаточных значений ошибки измерения при помощи пропагатора-эстиматора, при этом пропагатор-эстиматор сконфигурирован для итерационного прогнозирования и обновления множества состояний воздушного судна из модели воздушного судна; и
сравнение остаточных значений ошибки измерения с заданным статистическим порогом и генерирование сигнала тревоги, когда остаточные значения ошибки измерения превышают заданный статистический порог.
16. Способ по п. 15, отличающийся тем, что пропагатор-эстиматор является фильтром Кальмана.
17. Способ по п. 15, отличающийся тем, что сигнал тревоги генерирует отображение индикатором предупреждения, которое указывает на то, что произошел отказ первого инерциального измерительного блока.
18. Способ по п. 15, отличающийся тем, что производную по времени состояния пространственного положения воздушного судна вычисляют как функцию одного или более из угла атаки, настроек рулей, настройки тяги, пространственного положения и скорости воздушного судна;
производную по времени вектора состояния скорости воздушного судна вычисляют как функцию одного или более из угла атаки, настроек рулей, настройки тяги, пространственного положения и скорости воздушного судна;
производную по времени вектора состояния ошибки вертикальной скорости снижения вычисляют как функцию данных измерения барометрического высотомера; и
производную по времени вектора состояния скорости ветра вычисляют как функцию истинной воздушной скорости, полученной из данных датчика воздушного судна.
19. Способ по п. 18, отличающийся тем, что вектор состояния скорости ветра определяет стохастический процесс, представляющий ошибку в измерении истинной воздушной скорости; и
вектор состояния ошибки вертикальной скорости снижения определяет стохастический процесс, представляющий ошибку в измерении вертикальной скорости снижения.
20. Способ по п. 15, отличающийся тем, что состояние пространственного положения воздушного судна включает одно или оба из угла тангажа воздушного судна и угла крена воздушного судна.
| US 5184304 A1, 02.02.1993 | |||
| US 7219013 B1, 15.05.2007 | |||
| US 6681182 B2, 20.01.2004 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННЫХ КООРДИНАТ ПОДВИЖНЫХ ОБЪЕКТОВ И КОМПЛЕКСНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2010 |
|
RU2443978C1 |
| ОЦЕНКА ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ НАКЛОНЯЮЩЕГОСЯ ТЕЛА С ИСПОЛЬЗОВАНИЕМ МОДИФИЦИРОВАННОГО КВАТЕРНИОННОГО ПРЕДСТАВЛЕНИЯ ДАННЫХ | 2001 |
|
RU2253092C2 |

