Область техники, к которой относится изобретение
Настоящее изобретение относится к способу и устройству оценки навигационных данных наземного транспортного средства.
Уровень техники
Чтобы производить оценку навигационных данных носителя (положение, скорость, ориентация), как известно, на таком транспортном средстве устанавливают инерциальный навигационный блок INS (сокращение от англо-саксонского выражения “Inertial Navigation System”).
В настоящее время данные положения носителя на основе инерциальных данных, поступающих от инерциальной системы, имеют при чистой инерции точность порядка 1 Нм/час.
Однако существуют области применения, в которых желательно обеспечивать более высокую точность.
Чтобы добиться повышения точности, было предложено комбинировать инерциальные данные, выдаваемые инерциальным блоком, и информацию, внешнюю по отношению к носителю.
Для этого сначала применяют инерциальные измерения, чтобы оценить положение носителя, затем, чтобы скорректировать возможные погрешности этой оценки, используют внешнюю информацию, получаемую от другой системы. Такие навигационные системы часто обозначают термином «гибридные системы».
Например, известны системы этого типа, в которых коррекцию производят при помощи данных, поступающих от радионавигационной системы GNSS (внешняя информация). Однако проблема в данном случае состоит в том, что радионавигационные системы иногда подвергаются воздействию помех. В этом случае инерциальная навигационная система не может рассчитывать на данные GNSS, чтобы скорректировать правильное положение.
Разумеется, известны решения для устранения этого недостатка.
В случае носителя типа наземного транспортного средства (например, автомобиля) внешняя информация может поступать от одометра, установленного на транспортном средстве.
При этом используют данную расстояния, пройденного транспортным средством, которая поступает от одометра и которая считается относительно надежной, чтобы корректировать навигационные данные, выведенные из инерциальных данных.
Хотя система этого типа и отвечает в определенной степени поставленным задачам, в частности, для автотранспортных средств, ее интегрирование может быть связано с трудностями.
Во-первых, адаптация системы этого типа к транспортному средству часто создает проблемы, в частности, что касается нормального приема сигнала, передаваемого одометром. Такое качество приема требует, например, усилий со стороны разработчиков на уровне электронных схем, учитывая разнообразные формы, которые могут иметь сигналы.
Во-вторых, с учетом условий, в которых может двигаться транспортное средство (неровность местности, подъемы, спуски и т.д.), транспортное средство может деформироваться в разных направлениях пространства.
Например, если рассматривать составляющую перемещения, параллельную относительно направления движения транспортного средства, последнее может деформироваться вдоль этой составляющей (воздействие на подвески и т.д.), что приводит к потере релевантности сравнения одометрических измерений с интегрированными инерциальными измерениями.
Существуют другие решения, которые позволяют получить достаточную точность позиционирования в отсутствие радионавигационной системы или одометра.
Например, другое решение, известное под сокращением “ZUPT” от “Zero velocity Update”, состоит в периодической остановке носителя, чтобы скорости в осях пространства были нулевыми, и в использовании этой информации. Это решение часто обозначают выражением «гибридизация при нулевой скорости». В этом случае инерциальная навигационная система может оценить погрешности, связанные с показаниями датчиков, и повысить точность определения положения. Однако эти периодические остановки (каждые 4-10 минут в зависимости от требуемой точности) часто создают большие проблемы оперативного характера. Например, в случае военного носителя в фазе ведения боя остановка для применения гибридизации при нулевой скорости может быть проблематичной.
Чтобы решить эти проблемы, в документе FR2878954 был предложен способ оценки навигационных данных наземного транспортного средства, позволяющий добиться высокой эффективности позиционирования, причем без применения радионавигационной системы или одометра. В рамках этого способа применяют, в частности, кинематическую модель транспортного средства, то есть модель, позволяющую предсказать поведение транспортного средства (поведение при маневрировании, поведение на вираже, случай колесного или гусеничного транспортного средства). Однако для того, чтобы быть эффективной, такая кинематическая модель должна быть исключительно сложной.
Раскрытие сущности изобретения
Задачей изобретения является преодоление вышеупомянутых недостатков.
В связи с этим, первым объектом изобретения является способ оценки навигационных данных наземного транспортного средства, при этом способ содержит следующие этапы:
- получение инерциальных данных, считанных инерциальным датчиком, установленным на наземном транспортном средстве,
- получение параметров, связанных с геометрией и ориентаций дороги, по которой движется наземное транспортное средство,
- интегрирование инерциальных данных на основе параметров, чтобы получить навигационные данные транспортного средства, включающие в себя по меньшей мере одно перемещение транспортного средства относительно дороги, измеренное параллельно одному направлению, при этом транспортное средство может перемещаться параллельно направлению только в ограниченном интервале, не покидая дороги,
- оценка по меньшей мере одной погрешности в полученных навигационных данных посредством решения системы уравнений, предполагая при этом, что отклонение между вычисленным перемещением и соответствующим контрольным перемещением образует погрешность перемещения транспортного средства параллельно выбранному направлению, при этом контрольное перемещение, соответствующее вычисленному перемещению, имеет значение, меньшее или равное длине ограниченного интервала,
- коррекция полученных навигационных данных на основании оцененной погрешности, чтобы получить скорректированные навигационные данные.
Способ, являющийся первым объектом изобретения, может содержать следующие факультативные признаки или этапы, рассматриваемые отдельно или в комбинации, если это технически возможно.
В первом варианте выполнения параметры дороги включают в себя ширину дороги, измеренную в поперечном направлении, перпендикулярном к среднему направлению движения наземного транспортного средства по дороге. В этом случае навигационные данные транспортного средства, полученные на этапе интегрирования, включают в себя поперечное перемещение транспортного средства, измеренное параллельно поперечному направлению, и контрольное перемещение, соответствующее поперечному перемещению, имеет значение, меньшее или равное ширине дороги.
Контрольное перемещение, соответствующее поперечному перемещению, может иметь нулевое значение.
Во втором варианте выполнения навигационные данные транспортного средства, полученные на этапе интегрирования, включают в себя вертикальное перемещение транспортного средства, измеренное параллельно направлению, перпендикулярному к поверхности дороги, и в этом случае контрольное перемещение, соответствующее вертикальному перемещению, имеет нулевое значение.
Первый вариант выполнения, в котором используют поперечное перемещение, и второй вариант выполнения, в котором используют вертикальное перемещение, являются двумя альтернативными решениями поставленной выше задачи.
Первый вариант выполнения и второй вариант выполнения можно комбинировать, чтобы получить третий вариант выполнения, в котором: вычисляют оба типа вышеупомянутых перемещений (поперечное и вертикальное), оценивают соответствующие погрешности посредством решения системы уравнений, при этом выдвигают два предположения (что вычисленное вертикальное перемещение представляет собой погрешность перемещения транспортного средства параллельно вертикальному направлению и что вычисленное отклонение представляет собой погрешность перемещения транспортного средства параллельно поперечному перемещению).
Этап оценки можно осуществлять с применением фильтра Кальмана, и перемещение транспортного средства параллельно выбранному направлению можно использовать для фильтра Кальмана в качестве данной наблюдения.
Способ может содержать этапы получения спутниковых радионавигационных данных и согласования между спутниковыми радионавигационными данными и данными дороги, записанными в бортовой памяти транспортного средства, чтобы получить параметры, относящиеся к геометрии и ориентации дороги.
Если спутниковые радионавигационные данные недоступны, этап согласования можно осуществлять между скорректированными навигационными данными, полученными в результате предшествующего этапа коррекции, и данными дороги, которые могут быть записаны в памяти.
Вторым объектом изобретения является компьютерный программный продукт, содержащий командные коды программы для исполнения этапов способа, заявленного в качестве первого объекта изобретения, когда этот способ исполняет по меньшей мере один процессор.
Третьим объектом изобретения является устройство оценки навигационных данных наземного транспортного средства, при этом устройство содержит:
- интерфейс приема инерциальных данных, считанных по меньшей мере одним инерциальным датчиком, установленным на наземном транспортном средстве,
- интерфейс приема параметров, связанных с геометрией и ориентацией дороги, по которой движется наземное транспортное средство,
- по меньшей мере один процессор, выполненный с возможностью:
- интегрирования инерциальных данных на основе параметров, чтобы получить навигационные данные транспортного средства, включающие в себя по меньшей мере одно перемещение транспортного средства относительно дороги, измеренное параллельно одному направлению, при этом транспортное средство может перемещаться параллельно направлению только в ограниченном интервале, не покидая дороги,
- вычисления отклонения между вычисленным перемещением и соответствующим контрольным перемещением, имеющим значение, входящее в ограниченный интервал,
- оценки по меньшей мере одной погрешности в полученных навигационных данных посредством решения системы уравнений, предполагая при этом, что отклонение между вычисленным перемещением и соответствующим контрольным перемещением образует погрешность перемещения транспортного средства параллельно выбранному направлению,
- коррекции полученных навигационных данных на основании оцененной погрешности, чтобы получить скорректированные навигационные данные.
Четвертым объектом изобретения является система, предназначенная для установки на борту наземного транспортного средства, содержащая инерциальный блок, включающий в себя по меньшей мере один инерциальный датчик, устройство, являющееся третьим объектом изобретения и выполненное с возможностью получать инерциальные данные, генерируемые инерциальным блоком при помощи инерциального датчика.
Пятым объектом изобретения является система, предназначенная для установки на борту наземного транспортного средства, содержащая:
- память, содержащая данные дороги,
- приемник, выполненный с возможностью принимать спутниковые радионавигационные данные,
- устройство согласования, выполненное с возможностью осуществления согласования между спутниковыми радионавигационными данными и содержащимися в памяти данными дороги, чтобы получить параметры, связанные с геометрией и ориентацией дороги,
- устройство, являющееся третьим объектом изобретения, выполненное с возможностью получения параметров от устройства согласования.
Шестым объектом изобретения является наземное транспортное средство, содержащее устройство, являющееся третьим объектом изобретения, или систему, являющуюся четвертым или пятым объектом изобретения.
Краткое описание чертежей
Другие отличительные признаки, задачи и преимущества изобретения будет более очевидны из нижеследующего описания, которое представлено исключительно в качестве иллюстративного и не ограничительного примера со ссылками на прилагаемые чертежи, на которых:
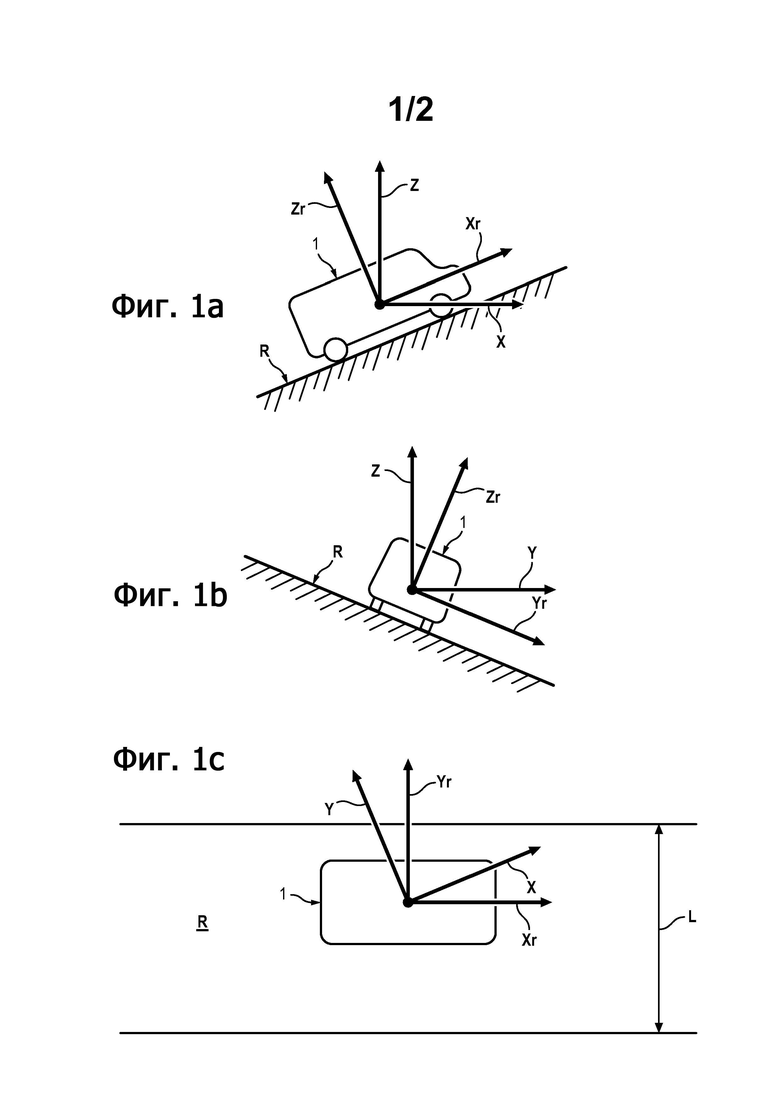
Фиг. 1а, 1b, 1с - наземное транспортное средство, перемещающееся по дороге, соответственно вид сбоку, спереди и сверху.
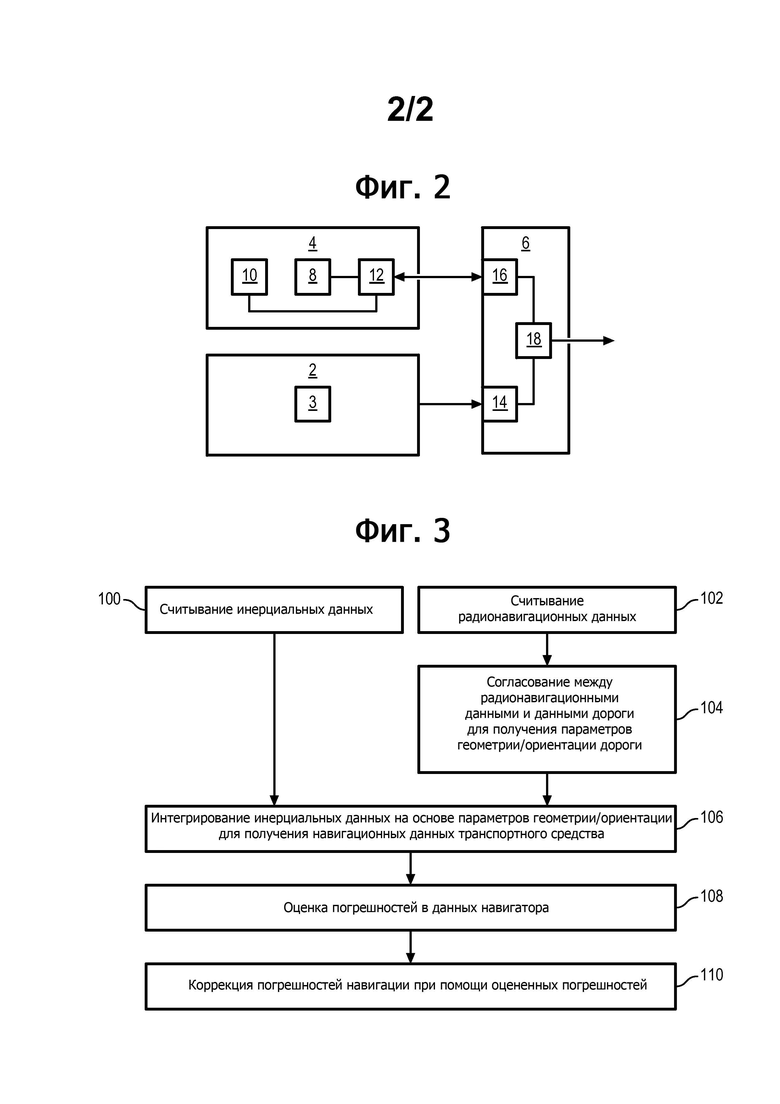
Фиг. 2 - схематичный вид навигационной системы согласно варианту выполнения изобретения.
Фиг. 3 - этапы способа, осуществляемого системой, показанной на фиг. 2, согласно варианту выполнения изобретения.
На всех фигурах подобные элементы имеют одинаковые обозначения.
Осуществление изобретения
На фиг. 1а-1с показано транспортное средство 1 на дороге R, а также две системы координат: локальная географическая система координат и система координат дороги.
Началом отсчета локальной географической системы координат является заранее определенная точка транспортного средства. Географическая система координат содержит три оси X, Y, Z:
- ось Х является горизонтальной осью, направленной на географический север Земли,
- ось Y является горизонтальной осью, направленной на географический запад, и
- ось Z является ортогональной к осям Х и Y и направлена к зениту.
Кроме того, система координат дороги содержит три оси Xr, Yr, Zr:
- ось Xr является продольной осью, параллельной главному направлению движения транспортного средства вдоль дороги,
- ось Yr является поперечной осью, перпендикулярной к оси Xr; обе оси Xr и Yr образуют плоскость, в которой расположена дорога,
- ось Zr является осью, вертикальной относительно плоскости, образованной осями Xr, Yr, то есть является перпендикулярной к поверхности дороги.
Начало отсчета системы координат дороги является, например, таким же, что и начало локальной географической системы координат.
Дорога имеет геометрические параметры и параметры ориентации. Эти параметры дороги, как правило, хорошо известны и регламентируются, например, во Франции документами, которые следует учитывать при проектировании дорог (см., например, документ под названием «Понятие об основных геометрических параметрах проектирования дорог», Sétra 2006).
Обычно параметрами дороги являются:
- угол продольного наклона,
- угол уклона или поперечного наклона,
- курсовой угол дороги,
- ширина дороги L.
Вышеупомянутые параметры дороги позволяют переходить от локальной географической системы координат или наоборот.
Соответствующие направления осей Xr и Zr являются носят особый характер. Действительно, если предположить, что транспортное средство перемещается по дороге, не покидая ее, то перемещение транспортного средства параллельно одной из осей Xr и Zr обязательно является ограниченным.
В частности, поскольку наземное транспортное средство летать не может, перемещение транспортного средства параллельно оси Zr должно быть нулевым или в среднем нулевым, если принимать во внимание колебания транспортного средства по оси Zr в результате работы подвесок этого транспортного средства.
Кроме того, перемещение транспортного средства в поперечном направлении, то есть параллельно оси Yr, ограничено двумя противоположными боковыми краями дороги. Таким образом, поперечное перемещение должно находиться в интервале, ограниченном этими двумя противоположными краями (следовательно, этот интервал имеет длину, равную ширине дороги).
На прямолинейном участке пути транспортное средство может производить движения кузова, которые в реальном времени приводят к небольшим перемещениям вдоль осей Yr и Zr, однако за время, необходимое для прохождения указанного участка пути, в среднем перемещения являются нулевыми, так как транспортное средство всегда возвращается в положение равновесия как по оси Yr, так и по оси Zr.
Разумеется, это относится также к участку пути на вираже или на склоне.
Как показано на фиг. 2, транспортное средство 1 содержит навигационную систему, включающую в себя инерциальный навигационный блок 2.
Как известно, инерциальный навигационный блок 2 содержит множество инерциальных датчиков 3, как правило, гироскопов и акселерометров (один из них показан на фиг. 2).
Кроме того, навигационная система содержит систему 4 выдачи геометрических параметров и параметров ориентации дороги и устройство 6 слияния данных.
Система 4 выдачи параметров содержит приемник 8 радионавигационных сигналов, память 10 и устройство 12 согласования.
Приемник 8 сам по себе известен. Он содержит антенну, выполненную с возможностью принимать сигналы, передаваемые спутником или спутниками (как правило, GPS/GNSS). Кром того, приемник 8 содержит по меньшей мере один процессор, выполненный с возможностью генерировать радионавигационные данные на основе принятых антенной сигналов (как правило, для оценки положения транспортного средства) и выдавать эти данные в устройство 12 согласования.
Кроме того, память 10 содержит базу данных дороги, включая геометрические данные дорог географической зоны, в которой должно перемещаться транспортное средство, например, дороги, показанной на фиг. 1-3.
Информация, записанная в базе данных, обычно представляет собой параметры геометрических уравнений (сегмент прямой, клотоиды), что позволяет экономить объем памяти.
Устройство 12 согласования, тоже само по себе известное, выполнено с возможностью производить известную обработку согласования, называемую на английском языке “map matching”, при этом согласование производят между данными, выдаваемыми приемником 8, и данными, содержащимися в базе данных дороги, записанной в памяти 8.
Устройство 6 слияния содержит интерфейс 14, выполненный с возможностью получать данные от инерциального навигационного блока 2, и интерфейс 16, выполненный с возможностью получать данные, вычисленные устройством 12 согласования системы 4 выдачи параметров.
Устройство 6 слияния выполнено с возможностью оценивать навигационные данные транспортного средства (положение, скорость, ориентация) на основе данных, которые оно получает через свои интерфейсы.
Как правило, устройство слияния содержит процессор 18, выполненный с возможностью исполнять программу, обеспечивающую такую оценку данных.
Следует отметить, что устройство слияния может также передавать данные в устройство 12 согласования. Предпочтительно такую передачу применяют в отсутствие приема приемником какого-либо радионавигационного сигнала.
Как показано на фиг. 3, когда транспортное средство 1 перемещается по дороге R, навигационная система осуществляет следующие этапы.
Инерциальный блок 2 считывает инерциальные данные при помощи инерциальных датчиков (этап 100).
Инерциальный блок 2 передает считанные инерциальные данные в устройство 6 слияния.
Кроме того, приемник 8 принимает передаваемые спутниками радионавигационные сигналы и генерирует радионавигационные данные на основе принятых сигналов.
Устройство 12 согласования производит обработку согласования между полученными от приемника радионавигационными данными и данными дороги, содержащимися в базе данных дороги, записанной в памяти 10, чтобы генерировать параметры, связанные с геометрией и ориентацией дороги, по которой движется наземное транспортное средство (этап 104).
Эти параметры включают в себя, в частности, ширину L дороги и даже вышеупомянутые углы уклона, наклона и курсовые углы.
Система 4 выдачи параметров передает генерированные параметры геометрии и ориентации в устройство 6 слияния.
Устройство 6 слияния осуществляет следующие этапы с целью оценки навигационных данных наземного транспортного средства 1 (эти навигационные данные могут включать в себя, например, положение, скорость и ориентацию транспортного средства в локальной географической системе координат).
Устройство 6 слияния интегрирует инерциальные данные на основе параметров, полученных от системы 4 выдачи, чтобы получить навигационные данные транспортного средства. Интеграционное вычисление осуществляют за временной интервал заранее определенной продолжительности.
Эти навигационные данные включают в себя по меньшей мере одно перемещение транспортного средства относительно дороги R, измеренное параллельно одному направлению, при этом транспортное средство может перемещаться параллельно направлению только в ограниченном интервале, не покидая дороги.
Навигационные данные включают в себя вертикальное перемещение транспортного средства относительно дороги R, то есть измеренное параллельно оси Zr. Как было указано выше, это вертикальное перемещение должно быть нулевым или в среднем нулевым, поскольку транспортное средство летать не может.
Эти навигационные данные включают в себя также поперечное перемещение транспортного средства относительно дороги R, то есть измеренное параллельно оси Yr. Как было указано выше, это поперечное перемещение ограничено двумя противоположными боковыми краями дороги R. Таким образом, поперечное перемещение входит в интервал длиной, равное ширине дороги, пока транспортное средство находится на дороге R.
Затем устройство 6 слияния оценивает по меньшей мере одну погрешность в навигационных данных, полученных в ходе этапа интегрирования, посредством решения системы уравнений с использованием некоторых предположений.
По меньшей мере для одного перемещения, вычисленного в ходе этапа интегрирования, устройством 6 слияния делает предположение, что отклонение между вычисленным перемещением и контрольным перемещением, соответствующим этому вычисленному перемещению, представляет собой погрешность перемещения транспортного средства параллельно направлению рассматриваемого перемещения. Контрольное перемещение, соответствующее вычисленному перемещению, имеет значение, меньшее или равное длине рассматриваемого ограниченного интервала.
Если навигационные данные, полученные в ходе этапа 106 интегрирования, содержат вертикальное перемещение и поперечное перемещение, система уравнений использует два предположения, по одному для каждого вычисленного перемещения.
Контрольное поперечное перемещение, соответствующее вычисленному поперечному перемещению, имеет значение, меньшее или равное ширине дороги. Иначе говоря, система уравнений выдвигает предположение, что транспортное средство не пересекает одну из двух боковых сторон дороги, по которой оно движется. Значение контрольного поперечного перемещения является, например, нулевым.
Кроме того, контрольное вертикальное перемещение, соответствующее вычисленному вертикальному перемещению, является нулевым. Иначе говоря, система уравнений исходит из того, что транспортное средство не летает.
После этого устройство 6 слияния корректирует (этап 110) полученные навигационные данные при помощи погрешности или погрешностей, оцененных посредством решения системы уравнений.
Вышеупомянутые этапы повторяются во времени на основе новых радионавигационных сигналов, принятых приемником, и/или новых инерциальных данных, полученных от инерциального навигационного блока.
Иногда прием спутниковых радионавигационных данных становится невозможным (например, когда транспортное средство проезжает через туннель).
Если обнаруживается отсутствие радионавигационных сигналов, этап согласования осуществляют между скорректированными навигационными данными, полученными в результате предыдущего этапа 12 коррекции, и данными дороги, записанными в памяти.
В варианте выполнения устройство 6 слияния применяет фильтр Кальмана для оценки навигационных данных транспортного средства.
Работа фильтра Кальмана сама по себе известна (ее принцип описан, в частности, в документе “Applied Optimal Estimation”, The Analytic Sciences Corporation, Ed. Arthur Gelb, 1974). Можно напомнить, что фильтр Кальмана рекурсивно оценивает состояние Х, представленное в виде вектора. Фильтр Кальмана имеет две разные фазы: фазу предсказания и фазу обновления.
Входом фазы предсказания является оцененное состояние, полученное во время предыдущей итерации фильтра, и используют переходную матрицу для оценки состояния, называемого предсказанным состоянием.
На этапе обновления используют наблюдения для коррекции предсказанного состояния с целью получения более точной оценки. Для этого используют матрицу наблюдения, связывающую состояние с наблюдениями. Обновленная оценка переходит на вход этапа предсказания последующей итерации фильтра, и так далее.
В данном случае фильтр Кальмана конфигурирован с вектором состояния Х, регулируемым следующими уравнениями:
где f является нелинейной функцией, и t обозначает время. Кроме того, F является матрицей динамики фильтра Кальмана. Ее получают путем линеаризации первого уравнения, где упоминается функция f. Среди составляющих вектора δХ можно указать: по меньшей мере 3 составляющих соответствующей погрешности положения относительно точки линеаризации, 3 составляющих соответствующей погрешности скорости относительно точки линеаризации и 3 составляющих погрешности ориентации относительно точки линеаризации.
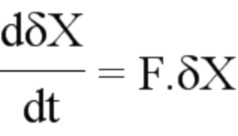
В варианте выполнения вектор состояния δХ является, например, следующим:
где:
- δLat является погрешностью широты (рад)
- δG является погрешностью долготы (рад)
- δZ является погрешностью высоты над уровнем моря (м)
- δVx является погрешностью скорости вдоль оси Xg (м/с)
- δVy является погрешностью скорости вдоль оси Yg (м/с)
- δVz является погрешностью скорости вдоль оси Zg (рад)
- ϕx является погрешностью ориентации вдоль оси Xg (рад)
- ϕy является погрешностью ориентации вдоль оси Yg (рад)
- ϕz является погрешностью ориентации вдоль оси Zg (рад)
- δbxm является погрешностью смещения акселерометра вдоль оси Xm (м/с2)
- δbym является погрешностью смещения акселерометра вдоль оси Ym (м/с2)
- δbzm является погрешностью смещения акселерометра вдоль оси Zm (м/с2)
- δdxm является погрешностью ухода гироскопа вдоль оси Xm (рад/с)
- δdym является погрешностью ухода гироскопа вдоль оси Ym (рад/с)
- δdzm является погрешностью ухода гироскопа вдоль оси Zm (рад/с)
- δdepYr является погрешностью перемещения вдоль оси Yr системы координат дороги (м)
- δdepZr является погрешностью перемещения вдоль оси Zr системы координат дороги (м).
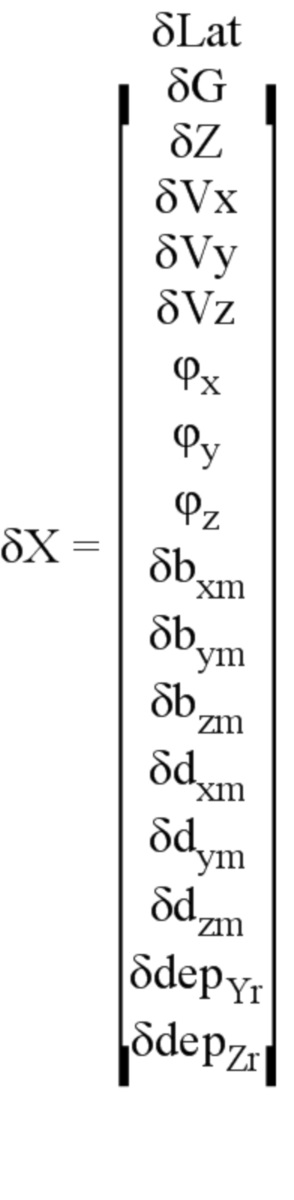
В этом случае переходную матрицу F записывают следующим образом:
где:
- Lat является широтой транспортного средства (рад)
-  является силой, измеренной акселерометром вдоль оси Xg (м/с2)
является силой, измеренной акселерометром вдоль оси Xg (м/с2)
-  является силой, измеренной акселерометром вдоль оси Yg (м/с2)
является силой, измеренной акселерометром вдоль оси Yg (м/с2)
-  является силой, измеренной акселерометром вдоль оси Zg (м/с2)
является силой, измеренной акселерометром вдоль оси Zg (м/с2)
- Ωt является угловой скоростью вращения Земли (рад/с)
- G0 является средним значением силы тяжести (м/с2)
- cc является косинусом курса транспортного средства
- sc является синусом курса транспортного средства
- cr является косинусом курса дороги
- sr является синусом курса дороги
- R является радиусом Земли.
В ходе этапа предсказания фильтр Кальмана вычисляет предсказанное состояние, используя матрицу динамики F.
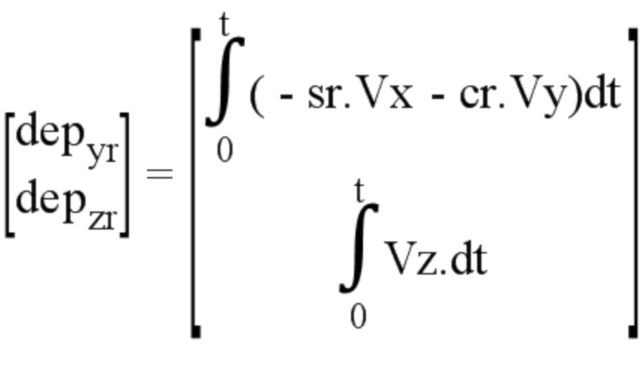
Кроме того, в качестве результата наблюдения фильтр Кальмана использует перемещение вдоль оси Yr и перемещение вдоль оси Zr. В этом случае матрицу наблюдения Н фильтра Кальмана записывают следующим образом:

После этого вычисляют текущую ошибку фильтра Кальмана.
Как известно, текущая ошибка является отклонением между контрольными данными и данными, наблюдаемыми фильтром.
Например, текущая ошибка “Inno” является следующей:
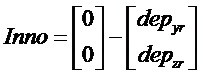
где:
depyr: Перемещение транспортного средства вдоль оси у системы координат дороги
depzr: Перемещение транспортного средства вдоль оси z системы координат дороги
В этом вычислении нулевой вектор с двумя составляющими является вектором контрольного перемещения, о котором речь шла выше. Следовательно, текущая ошибка фильтра Кальмана соответствует вектору отклонений между вектором вычисленных перемещений и вектором нулевых контрольных перемещений. Использование этой текущей ошибки фильтром Кальмана в ходе его применения иллюстрирует выдвинутые предположения, а именно то, что транспортное средство не покидает дороги, перемещаясь вдоль осей Yr и Zr.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВОЙ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА ПО СИГНАЛУ РАДИОНАВИГАЦИОННОГО ОРИЕНТИРА | 2008 |
|
RU2367909C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОНТРОЛЬНЫХ ЗНАЧЕНИЙ ПАРАМЕТРОВ ПРОСТРАНСТВЕННО-УГЛОВОЙ ОРИЕНТАЦИИ САМОЛЁТА НА ТРАССАХ И ПРИАЭРОДРОМНЫХ ЗОНАХ ПРИ ЛЁТНЫХ ИСПЫТАНИЯХ ПИЛОТАЖНО-НАВИГАЦИОННОГО ОБОРУДОВАНИЯ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2584368C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ И КОМПЛЕКСИРОВАННАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2009 |
|
RU2395061C1 |
| МОБИЛЬНАЯ БАЗОВАЯ КОНТРОЛЬНАЯ СТАНЦИЯ ДЛЯ ПОЛУЧЕНИЯ ПАРАМЕТРОВ ТРАЕКТОРНОГО ДВИЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА И ОЦЕНКИ РАБОТОСПОСОБНОСТИ СИСТЕМ ПИЛОТАЖНО-НАВИГАЦИОННОГО КОМПЛЕКСА ПРИ ЛЕТНЫХ ИСПЫТАНИЯХ | 2007 |
|
RU2330320C1 |
| СИСТЕМА КОМПЛЕКСНОЙ ОБРАБОТКИ ИНФОРМАЦИИ РАДИОНАВИГАЦИОННЫХ И АВТОНОМНЫХ СРЕДСТВ НАВИГАЦИИ ДЛЯ ОПРЕДЕЛЕНИЯ ДЕЙСТВИТЕЛЬНЫХ ЗНАЧЕНИЙ ПАРАМЕТРОВ САМОЛЕТОВОЖДЕНИЯ | 2012 |
|
RU2487419C1 |
| СПОСОБ КОРРЕКЦИИ ТРАЕКТОРИИ ПОЛЕТА КОСМИЧЕСКОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2013 |
|
RU2537818C1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС | 2005 |
|
RU2279039C1 |
| АСТРОНАВИГАЦИОННАЯ СИСТЕМА | 2014 |
|
RU2607197C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННЫХ КООРДИНАТ ПОДВИЖНЫХ ОБЪЕКТОВ И КОМПЛЕКСНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2010 |
|
RU2443978C1 |
| АСТРОНАВИГАЦИОННАЯ СИСТЕМА | 2015 |
|
RU2592715C1 |
Изобретение относится к способу оценки навигационных данных наземного транспортного средства, содержащему этапы, на которых: принимают инерциальные данные, считанные (100) инерциальным датчиком, принимают параметры геометрии и ориентации проходимой дороги, интегрируют (106) данные на основе параметров для получения навигационных данных, включающих в себя перемещение транспортного средства относительно дороги, измеренное в направлении (Zr, Yr), при этом транспортное средство может перемещаться в этом направлении только в ограниченном интервале, не покидая дороги, оценивают (108) погрешность в полученных навигационных данных посредством решения системы уравнений в предположении, что отклонение между вычисленным перемещением и контрольным перемещением образует погрешность перемещения транспортного средства параллельно направлению, при этом контрольное перемещение имеет значение, меньшее или равное длине указанного интервала, корректируют (110) полученные навигационные данные на основании оцененной погрешности. Техническим результатом является повышение точности позиционирования наземного транспортного средства. 7 н. и 4 з.п. ф-лы, 5 ил.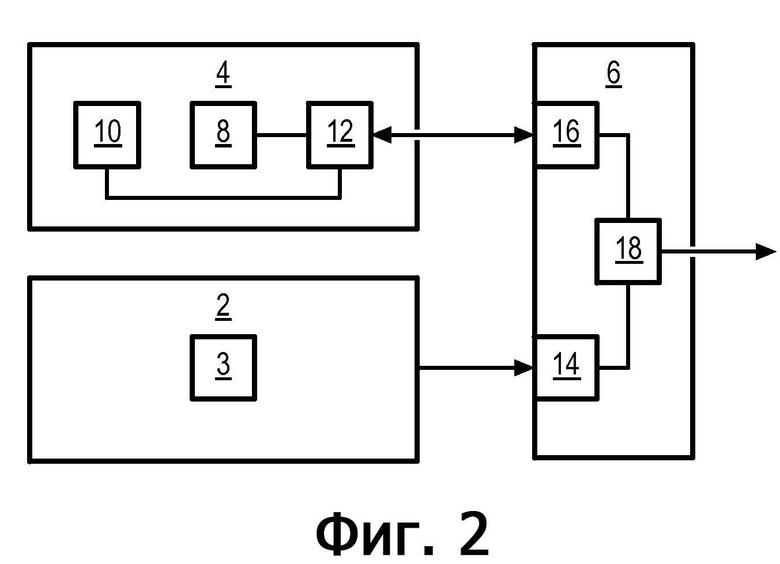
1. Способ оценки навигационных данных наземного транспортного средства, содержащий этапы, на которых:
принимают инерциальные данные, считанные (100) инерциальным датчиком, установленным на наземном транспортном средстве,
принимают параметры, относящиеся к геометрии и ориентации дороги, по которой движется наземное транспортное средство,
интегрируют (106) инерциальные данные на основе параметров для получения навигационных данных транспортного средства, включающих в себя по меньшей мере одно вертикальное перемещение транспортного средства, измеренное параллельно направлению (Zr), перпендикулярному к поверхности дороги,
оценивают (108) по меньшей мере одну погрешность в полученных навигационных данных посредством решения системы уравнений в предположении, что вычисленное вертикальное перемещение образует погрешность перемещения транспортного средства параллельно вертикальному направлению,
корректируют (110) полученные навигационные данные на основании оцененной погрешности для получения скорректированных навигационных данных.
2. Способ оценки навигационных данных наземного транспортного средства, содержащий этапы, на которых:
принимают инерциальные данные, считанные (100) инерциальным датчиком, установленным на наземном транспортном средстве,
принимают параметры, относящиеся к геометрии и ориентации дороги, по которой движется наземное транспортное средство, при этом параметры включают в себя ширину (L) дороги, измеренную вдоль поперечного направления (Yr), перпендикулярного к среднему направлению (Xr) движения наземного транспортного средства по дороге,
интегрируют (106) инерциальные данные на основе параметров для получения навигационных данных транспортного средства, включающих в себя по меньшей мере одно поперечное перемещение транспортного средства относительно дороги, измеренное параллельно поперечному направлению (Yr),
вычисляют отклонение между вычисленным поперечным перемещением и соответствующим контрольным перемещением, имеющим заданное значение, меньшее или равное ширине (L) дороги,
оценивают (108) по меньшей мере одну погрешность в полученных навигационных данных посредством решения системы уравнений в предположении, что вычисленное отклонение образует погрешность перемещения транспортного средства параллельно поперечному направлению,
корректируют (110) полученные навигационные данные на основании оцененной погрешности для получения скорректированных навигационных данных.
3. Способ по п. 2, в котором контрольное перемещение, соответствующее поперечному перемещению, имеет нулевое значение.
4. Способ по любому из пп. 1-3, в котором этап оценки осуществляют с применением фильтра Кальмана, при этом перемещение транспортного средства параллельно выбранному направлению используется фильтром Кальмана в качестве данных наблюдения.
5. Способ по любому из пп. 1-4, содержащий этапы, на которых:
получают (102) спутниковые радионавигационные данные,
согласуют (104) спутниковые радионавигационные данные и данные дороги, записанные в бортовой памяти транспортного средства для получения параметров, относящихся к геометрии и ориентации дороги.
6. Способ по п. 5, в котором, если спутниковые радионавигационные данные недоступны, этап согласования осуществляют между скорректированными навигационными данными, полученными в результате предшествующего этапа коррекции, и записанными в памяти данными дороги.
7. Устройство (6) оценки навигационных данных наземного транспортного средства, содержащее:
интерфейс (14) для приема инерциальных данных, считываемых по меньшей мере одним инерциальным датчиком, установленным на наземном транспортном средстве,
интерфейс (16) для приема параметров, относящихся к геометрии и ориентации дороги, по которой движется наземное транспортное средство,
по меньшей мере один процессор (18), выполненный с возможностью:
интегрирования инерциальных данных на основе параметров для получения навигационных данных транспортного средства, включающих в себя по меньшей мере одно вертикальное перемещение транспортного средства относительно дороги, измеренное параллельно вертикальному направлению, перпендикулярному к поверхности дороги,
оценки по меньшей мере одной погрешности в полученных навигационных данных посредством решения системы уравнений в предположении, что вычисленное вертикальное перемещение образует погрешность перемещения транспортного средства параллельно вертикальному направлению,
коррекции полученных навигационных данных на основании оцененной погрешности для получения скорректированных навигационных данных.
8. Устройство (6) оценки навигационных данных наземного транспортного средства, содержащее:
интерфейс (14) для приема инерциальных данных, считываемых по меньшей мере одним инерциальным датчиком, установленным на наземном транспортном средстве,
интерфейс (16) для приема параметров, относящихся к геометрии и ориентации дороги, по которой движется наземное транспортное средство, при этом параметры включают в себя ширину (L) дороги, измеренную вдоль поперечного направления (Yr), перпендикулярного к среднему направлению (Xr) движения наземного транспортного средства по дороге,
по меньшей мере один процессор (18), выполненный с возможностью:
интегрирования инерциальных данных на основе параметров для получения навигационных данных транспортного средства, включающих в себя по меньшей мере одно поперечное перемещение транспортного средства относительно дороги, измеренное параллельно поперечному направлению,
вычисления отклонения между вычисленным поперечным перемещением и соответствующим контрольным перемещением, имеющим заданное значение, меньшее или равное ширине (L) дороги,
оценки по меньшей мере одной погрешности в полученных навигационных данных посредством решения системы уравнений в предположении, что вычисленное отклонение образует погрешность перемещения транспортного средства параллельно поперечному направлению,
коррекции полученных навигационных данных на основании оцененной погрешности для получения скорректированных навигационных данных.
9. Система, предназначенная для установки на борту наземного транспортного средства, содержащая:
инерциальный блок (2), включающий в себя по меньшей мере один инерциальный датчик (3),
устройство (6) по п. 7 или 8, выполненное с возможностью приема инерциальных данных, генерируемых инерциальным блоком при помощи инерциального датчика (3).
10. Система, предназначенная для установки на борту наземного транспортного средства, содержащая:
память (8), содержащую данные дороги,
приемник, выполненный с возможностью принимать спутниковые радионавигационные данные,
устройство (12) согласования, выполненное с возможностью осуществления согласования спутниковых радионавигационных данных и содержащихся в памяти данных дороги для получения параметров, относящихся к геометрии и ориентации дороги,
устройство по п. 7 или 8, выполненное с возможностью приема параметров от устройства согласования.
11. Наземное транспортное средство (1), содержащее устройство по п. 8 или систему по любому из пп. 9 или 10.
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПОДВИЖНОГО ОБЪЕКТА ПОСРЕДСТВОМ ГИБРИДНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ (ВАРИАНТЫ) | 2008 |
|
RU2399065C2 |
| СИСТЕМА И СПОСОБ КОНТРОЛЯ ПОЛОСЫ ДВИЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2572939C9 |
| СПОСОБ КОРРЕКЦИИ ПОЗИЦИОННОЙ ПОГРЕШНОСТИ В НАВИГАЦИОННОЙ СИСТЕМЕ | 2003 |
|
RU2254558C2 |
| EP 1949032 B1, 07.05.2014. | |||

