Настоящее изобретение касается способа и устройства частотного анализа данных. В частности, его применяют для анализа данных испытаний самолетов на допуск к области полетных режимов.
Настоящее изобретение находит свое применение, в частности, в области авиации для систем управления полетом, например для анализа и контроля в полете вибрационных мод конструкций, в автомобильной области для исследования и контроля вибраций транспортных средств, в электродинамике (контроль машин производства электроэнергии), в частности, в ядерной промышленности для вибрационного мониторинга сердцевины реактора, в механике (проектирование и контроль подвижных деталей), в сейсмике (исследование сигналов, используемых при нефтеразведовательных работах) и в зоологии (исследование звуков, издаваемых животными).
Задачей изобретения является осуществление во время теста (в ходе полета в случае самолета) оценки характеристик транспортного средства и, в частности, резонансных частот и спектральных характеристик. Иначе говоря, речь идет об очень быстром извлечении и даже о вычислении в режиме реального времени соответствующих сигнатур из очень большого количества данных, поступающих от датчиков, установленных на транспортном средстве.
Совокупность определенных таких образом характеристик системы позволяет конструкторам улучшить конструкцию системы с целью повышения ее комфортабельности, ее полетных возможностей, расхода и т.д.
Сигналы, которые необходимо анализировать, состоят из шума, к которому добавляются один или несколько синусоидальных сигналов, частоты и амплитуды которых могут меняться в течение времени. Речь идет об оценке этих частот и этих амплитуд в реальном времени.
В области аэроупругости, - дисциплины, которая изучает взаимодействия между аэродинамикой, силами инерции и упругости, - явление флаттера является очень опасной колебательной неустойчивостью конструкции самолета (крыльев, фюзеляжа, хвостового оперения …), поскольку он может повлиять на целостность этой конструкции и привести к ее повреждению и даже разрушению. Комбинация из двух или нескольких движений конструкции самолета, имеющих разную природу, в сочетании с соответствующими сдвигами фазы позволяет аэродинамическим силам обеспечивать энергию для системы. При этом устойчивое явление преобразуется в неустойчивое явление, при котором энергия перестает рассеиваться: это является межмодовой связью. Наиболее часто встречающимся примером является флаттер крыла в результате межмодовой связи при изгибе и при кручении, который при квадратуре фазы приводит к появлению аэродинамических подъемных сил такого же направления, что и перемещение, и, таким образом, к появлению расходящихся колебаний.
На характеристику флаттера оказывают влияние несколько параметров: масса, жесткость, форма конструкции, а также рабочие условия, такие как скорость. Чтобы обезопасить себя от этого явления, его необходимо исследовать и, при его наличии, убедиться, что порог его появления находится выше максимальной рабочей скорости (увеличенной на 15%). Сначала проводят испытания в аэродинамической трубе, затем дополняют испытаниями конструкции самолета на вибрацию на земле. Теоретические исследования позволяют определить область, в которой не проявляется флаттер, и начиная от которой можно пошагово осуществлять полный допуск к области полетных режимов путем «возбуждения» конструкции самолета.
Для извлечения почти в реальном времени значений частоты и ослабления и изучения их изменения в области полетных режимов используют методы идентификации модальных параметров. Анализ временных данных, полученных в результате испытаний на флаттер, является сложным: данные являются зашумленными и требуют соответствующего приведения к форме путем обработки сигнала (в частности, фильтрования и субдискретизации). Для «глобального» и автоматического извлечения модальных параметров аэроупругой конструкции в настоящее время применяют несколько датчиков.
Известен документ WO03005229, в котором описана система частотного анализа сигналов, поступающих от датчика. Вместе с тем, разрешающая способность этого анализа является ограниченной.
Настоящее изобретение призвано устранить эти недостатки.
В связи с этим первым объектом настоящего изобретения является способ частотного анализа системы, отличающийся тем, что содержит:
- этап ввода сигналов, поступающих от первого датчика,
- этап ввода сигналов, поступающих, по меньшей мере, от второго датчика, при этом каждый второй датчик располагают вблизи первого датчика, чтобы сигналы, поступающие от каждого второго датчика, были сильно коррелированными с сигналами, поступающими от первого датчика,
- этап оценки для каждого датчика передаточной функции или модели, реализуемой на основании совокупности сигналов от первого датчика и от каждого второго датчика, и
- этап извлечения структурных свойств системы на основании каждой из оценочных моделей.
Модель рассматривает сигнал, поступающий от датчика, как выход из фильтра, возбуждаемого «белым» шумом. Структурные свойства включают в себя, например, спектральные свойства, частоты, амплитуды, исходные фазы, ослабления, моды.
Таким образом, модель, представляющую структурные моды, рассматривают как линейную. Благодаря применению настоящего изобретения осуществляют обработку в реальном времени путем онлайнового отслеживания пар частота/ослабление. Настоящее изобретение позволяет убедиться в реальном времени, что поведение системы, например самолета, удовлетворительное, поскольку в реальном времени располагают структурными свойствами системы. Таким образом, можно улучшить используемые методы анализа и соблюдать при этом все возрастающие требования к выигрышу времени и, следовательно, сокращению расходов.
Согласно частным отличительным признакам, во время этапа оценки сигналы, поступающие от датчиков, рассматривают как полиномы. Благодаря этому отображение сигналов является компактным, поскольку число коэффициентов полиномов намного меньше числа применяемых выборок сигналов.
Согласно частным отличительным признакам, во время этапа оценки решают рекуррентное линейное уравнение с коэффициентами, медленно меняющимися во времени и в пространстве между датчиками.
Согласно частным отличительным признакам, этап оценки содержит:
- этап адаптивного моделирования, рекурсивного по времени, порядку и пространству датчиков, и
- этап оценки мод для каждого порядка в зависимости от результата этапа адаптивного моделирования.
Согласно частным отличительным признакам, каждый этап ввода сигналов, поступающих от датчиков, содержит этап снижения в реальном времени уровня шумов сигналов, поступающих от датчиков, предшествующий этапу адаптивного моделирования.
Согласно частным отличительным признакам, этап оценки содержит этап извлечения параметров модели в зависимости от результата этапа адаптивного моделирования.
Согласно частным отличительным признакам, этап извлечения параметров модели содержит этап инверсии матрицы полиномов порядка N и размером, равным числу датчиков.
Согласно частным отличительным признакам, этап оценки мод осуществляют таким образом, чтобы получить параметры каждой из моделей, образующие совокупность избыточных данных, позволяющую сократить дисперсию оценочных мод.
Согласно частным отличительным признакам, этап адаптивного моделирования осуществляет моделирование типа ARMA («авторегрессивное скользящее среднее»).
Согласно частным отличительным признакам, упомянутое моделирование типа ARMA осуществляют в каждый момент, для каждого датчика и для всех рассматриваемых порядков.
Согласно частным отличительным признакам, этап оценки содержит этап инверсии полиномиальной матрицы, которая является симметричной взаимоспектральной матрицей, отображающей на своей главной диагонали спектральную плотность мощности каждого из датчиков и в других членах - взаимные спектры.
Согласно частным отличительным признакам, этап адаптивного моделирования содержит рекурсию по времени, по порядку модели при N=[1, 2, …, Nmax] и по числу датчиков для следующих этапов:
- вычисление векторов погрешностей заднего и переднего линейного предсказания,
- вычисление матриц частичной передней и задней корреляции,
- вычисление ковариационных матриц погрешностей заднего и переднего линейного предсказания,
- вычисление матрицы степени погрешности переднего линейного предсказания,
- прямое вычисление векторов усиления
 ,
,
где альфа является скаляром, лямбда - коэффициентом упущения и  -
-
- вычисление вектора  посредством рекуррентности на основании известного
посредством рекуррентности на основании известного  и
и
- вычисление матриц Ak, отображающих модели, при k = от 1 до N.
Согласно частным отличительным признакам, описанный выше способ в соответствии с настоящим изобретением содержит этап классификации мод, полученных в результате этапа оценки мод, с соблюдением одного из следующих двух условий:
- из одной и той же модели получают только одну моду на класс, и
- все оценки имеют одинаковый весовой коэффициент независимо от происхождения оценки.
Согласно частным отличительным признакам, упомянутые сигналы характеризуют ускорения конструкции самолета.
Вторым объектом настоящего изобретения является компьютерная программа, загружаемая в информационную систему, при этом упомянутая программа содержит команды, позволяющие выполнять описанный выше способ в соответствии с настоящим изобретением.
Преимущества, цели и отличительные признаки этой программы схожи с преимуществами, целями и отличительными признаками способа, являющегося объектом настоящего изобретения, как кратко изложено выше, они не упоминаются здесь.
Другие преимущества, цели и отличительные признаки настоящего изобретения будут более очевидны из нижеследующего описания, представленного в качестве не ограничительного примера, со ссылками на прилагаемые чертежи, на которых:
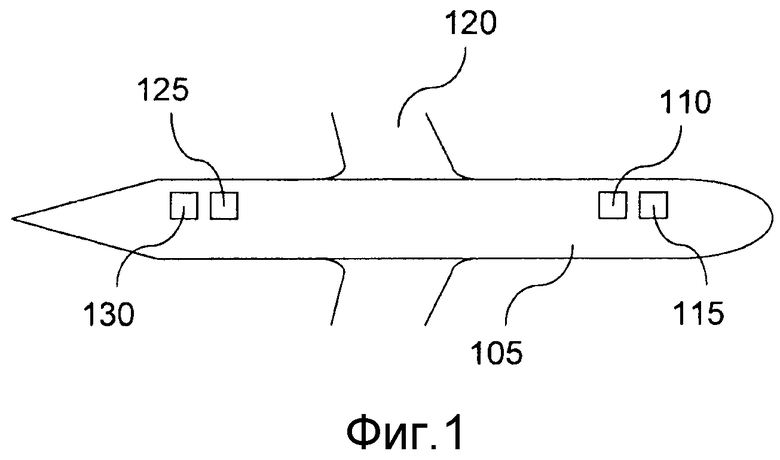
Фиг.1 - схематичный вид самолета, содержащего устройство, выполненное с возможностью осуществления способа в соответствии с настоящим изобретением.
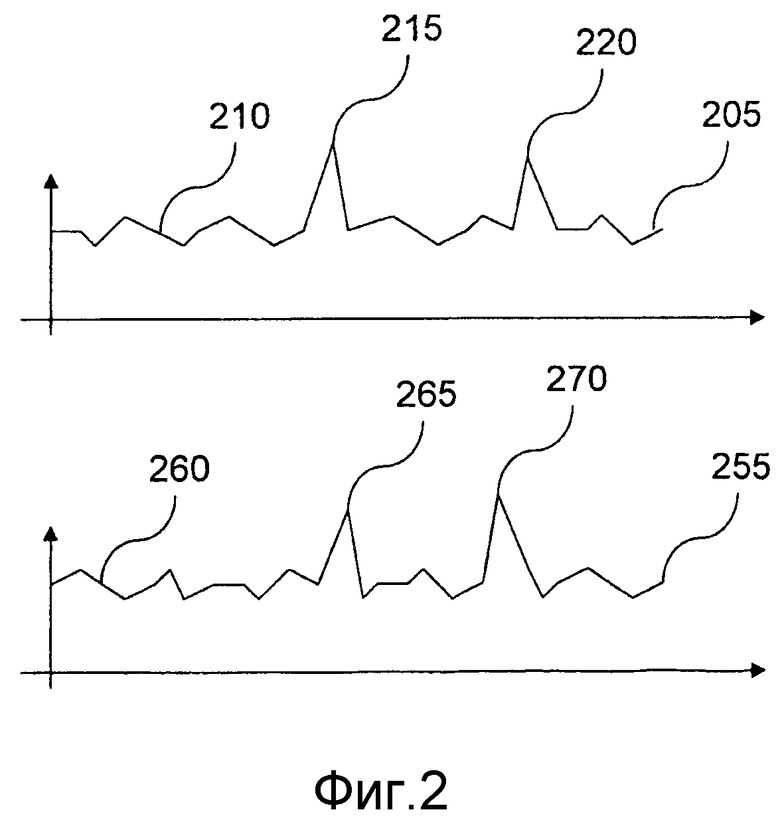
Фиг.2 - сигналы, поступающие от двух датчиков устройства, показанного на фиг.1.
Фиг.3 - логическая блок-схема этапов, применяемых в первом варианте выполнения способа в соответствии с настоящим изобретением.
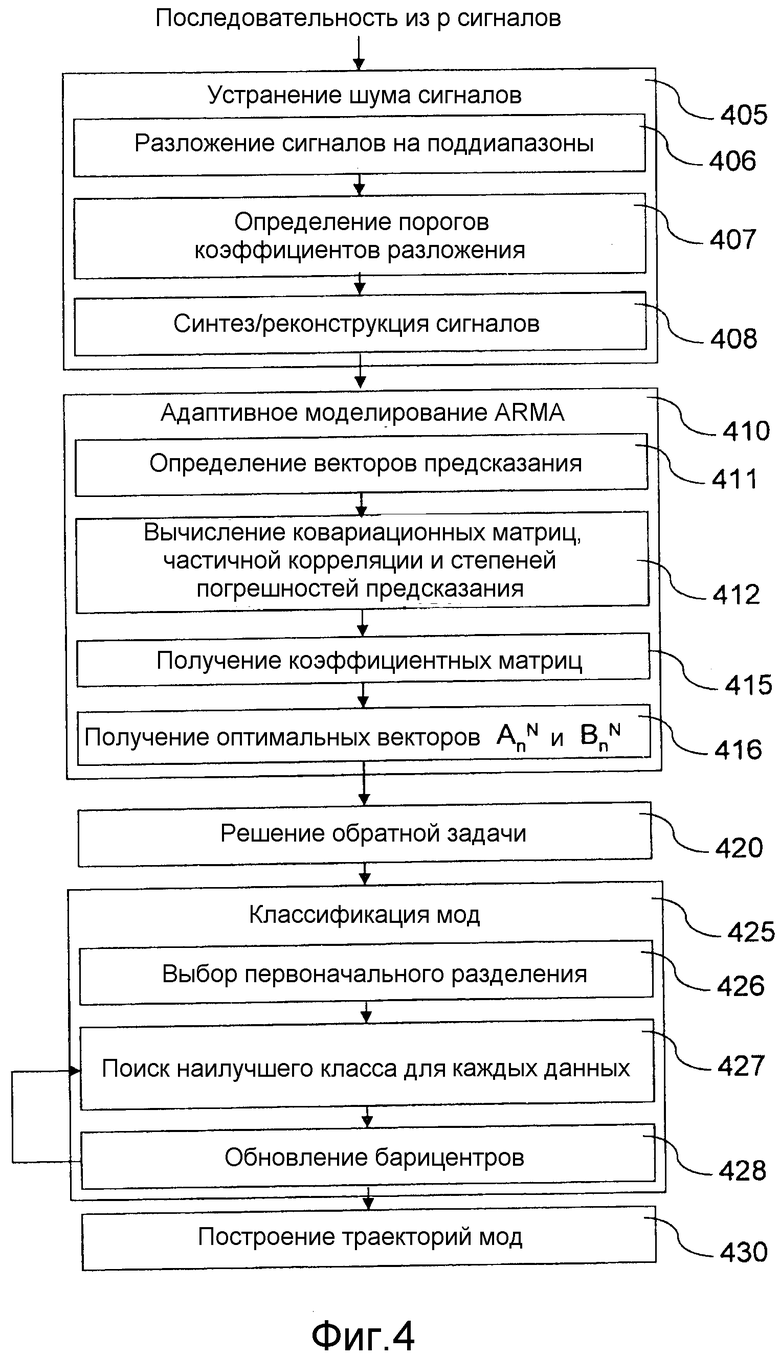
Фиг.4 - логическая блок-схема этапов, применяемых во втором варианте выполнения способа в соответствии с настоящим изобретением.
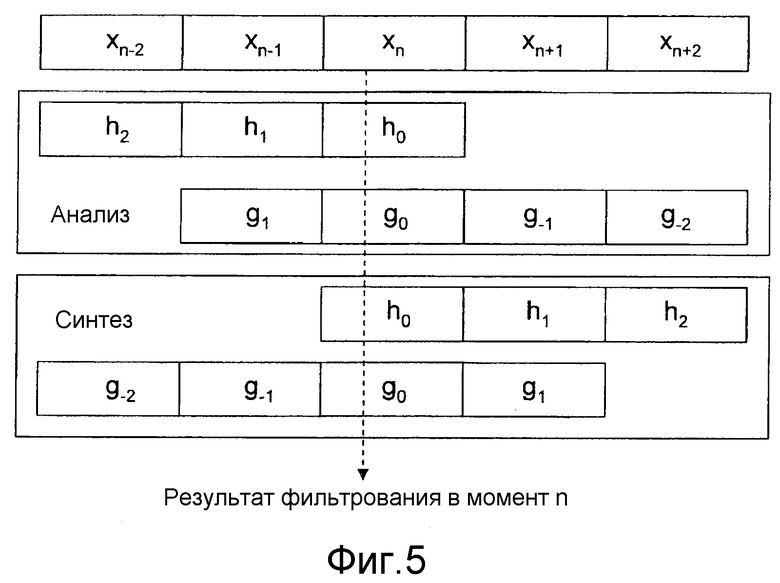
Фиг.5 - компоновка фильтров, применяемая на одном из этапов, показанных на фиг.4.
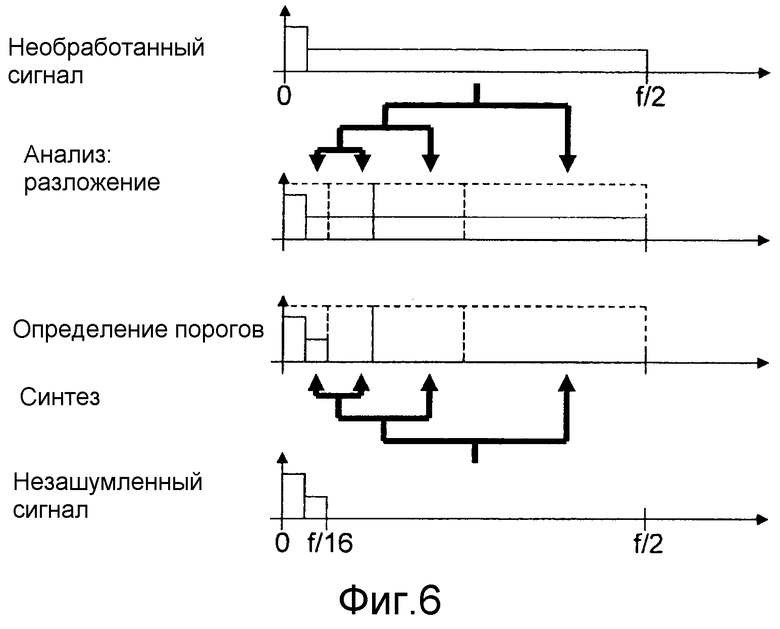
Фиг.6 - схема последовательных функций, применяемых в варианте выполнения системы снижения шума.
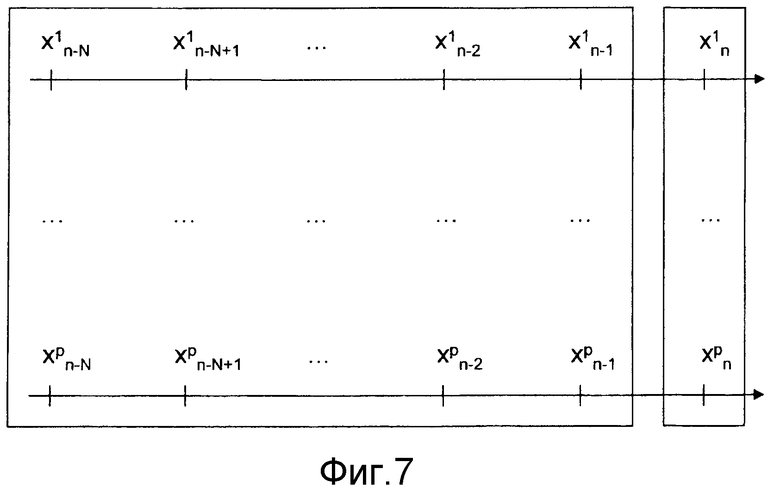
Фиг.7 - схема одномоментных выборок сигналов, поступающих от датчиков и образующих входные данные для алгоритма в варианте выполнения, показанном на фиг.4.
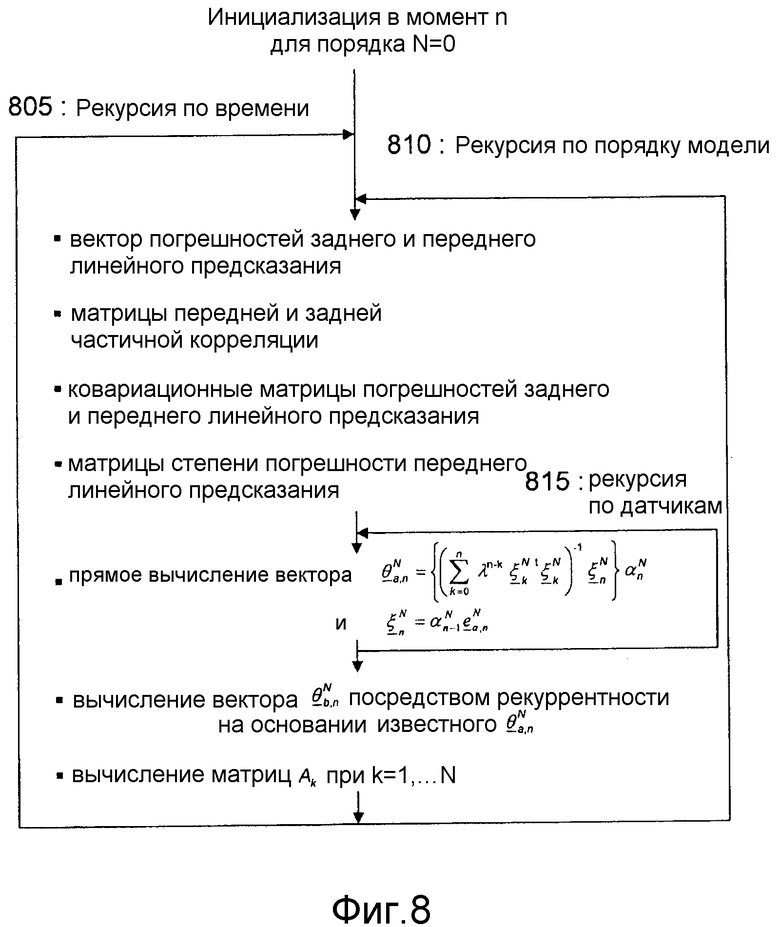
Фиг.8 - схема рекурсий, применяемых во втором варианте выполнения, показанном на фиг.4.
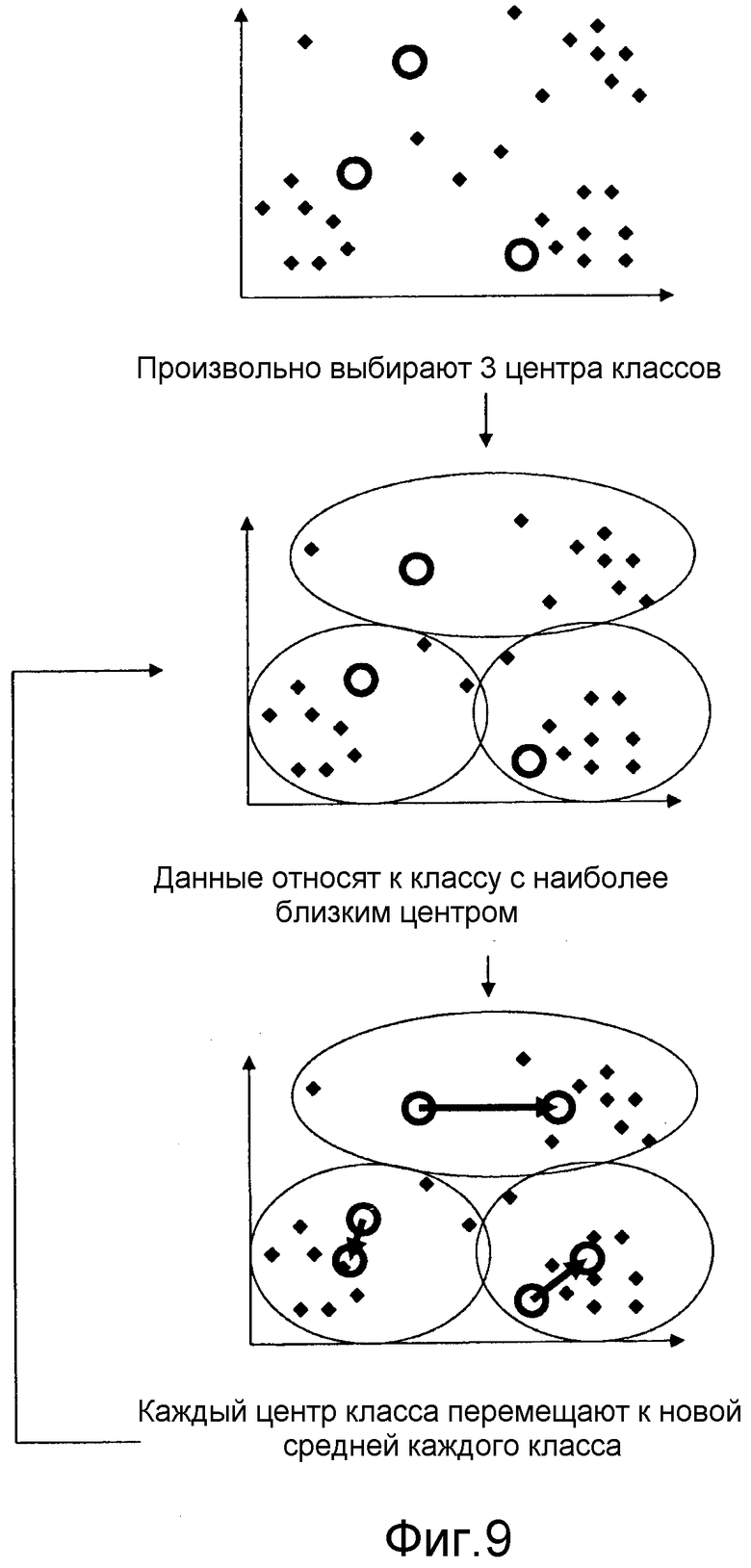
Фиг.9 - схема изменения классов неконтролируемого метода классификации типа «динамических облаков».
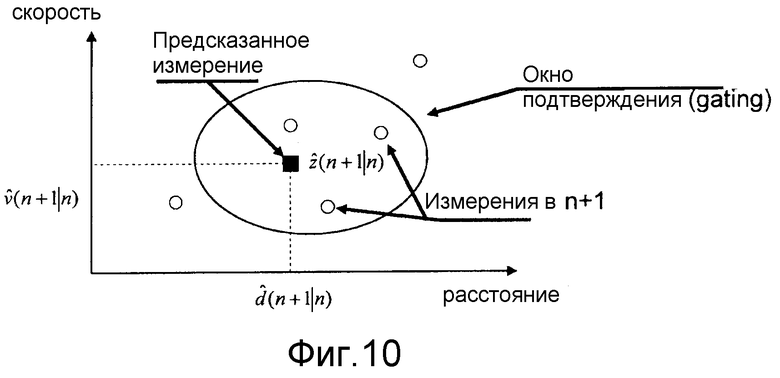
Фиг.10 - окно подтверждения, применяемое во втором варианте выполнения, показанном на фиг.4.
На фиг.1 показан самолет 105, оборудованный двумя близкими друг к другу датчиками 110 и 115 спереди от крыла 120 и двумя близки друг к другу датчиками 125 и 130 сзади от крыла 120.
Для упрощения чертежа на фиг.1 показаны только две пары близких датчиков. При этом необходимо отметить, что в реальном осуществлении настоящего изобретения применяют более двух пар.
В данном случае термин «близкий» относится к датчикам, которые принимают сигналы, сильно коррелированные между собой.
Близкие датчики воспринимают по существу одни и те же вибрации, смещенные во времени и затухающие по-разному, но согласно по существу линейной передаточной функции. Рассматриваемые датчики являются, например, акселерометрами.
На фиг.2 показано, что сигнал 205, поступающий от первого датчика пары датчиков, содержит шум 210 и два пика 215 и 220, и что сигнал 255, поступающий от второго датчика этой же пары датчиков, содержит шум 260 и два пика 265 и 270. Пик 265 соответствует ослабленному и смещенному во времени пику 215. Пик 220 соответствует ослабленному и смещенному во времени пику 270.
Как можно легко понять, за счет применения совокупностей (в данном случае пар), по меньшей мере, из двух близких датчиков настоящее изобретение позволяет производить анализ структурных свойств самолета. Эти структурные свойства включают в себя, например, спектральные свойства, частоты, амплитуды, исходные фазы, ослабления, моды.
В первом варианте выполнения, показанном на фиг.3, способ частотного анализа в соответствии с настоящим изобретением, прежде всего, содержит этап 305 позиционирования на конструкции механической системы, подвергающейся действию вибраций, групп из множества датчиков. В каждой группе датчиков, по меньшей мере, один датчик, называемый «вторым», располагают вблизи датчика, называемого «первым».
Во время работы механической системы осуществляют этап 310 ввода сигналов, поступающих от первого датчика упомянутой группы датчиков, и этап 315 ввода сигналов, поступающих, по меньшей мере, от второго датчика этой же группы датчиков. Каждый этап ввода сигналов, поступающих от датчика, содержит этап снижения уровня шума сигналов, поступающих от этого датчика. Это снижение шума можно производить от датчика к датчику известным образом или на векторе, содержащем для каждой из своих координат сигнал, поступающий от датчика. Предпочтительно эту функцию снижения шума обеспечивают путем разложения на элементарные волны (алгоритм Стефана Малла). Например, во время этапов 310 и 315 для конструкции, в которой искомыми являются собственные частоты ниже 16 Гц, сигналы, поступающие от датчиков, дискретизируют по частоте намного выше, например 256 Гц на фиг.6. Следует отметить, что использование элементарных волн обеспечивает простую и быструю обработку.
На этапе 320 производят извлечение передаточных функций путем обработки сигналов, поступающих от первого датчика и от каждого второго датчика. Таким образом, модель, представляющую структурные моды, рассматривают как линейную и осуществляют онлайновое отслеживание пар частота/ослабление без учета ввода, то есть введенного возбуждения.
На этапе 320 сигналы, поступающие от датчиков, рассматривают как полиномы и извлекают данные из сигналов, поступающих от датчиков, после учета изменений фазы и значения упомянутых данных между сигналами, поступающими от разных датчиков разных групп датчиков.
На этапе 320 осуществляют этап 325 решения линейного рекуррентного уравнения с коэффициентами, медленно меняющимися во времени, чтобы произвести оценку моделей в достаточно устойчивом интервале времени.
Этап 325 содержит:
- этап 330 адаптивного моделирования типа ARMA, рекурсивного по времени (в каждый момент), порядку (для каждого рассматриваемого порядка) и пространству датчиков (для каждого датчика), и
- этап 350 оценки мод для каждого порядка в зависимости от результата этапа адаптивного моделирования.
На этапе 330 осуществляют моделирование параметрического типа, типа ARMA (авторегрессивное скользящее среднее). Выборки, полученные от датчиков, объединяют в один вектор, число компонент которого является рассматриваемым числом датчиков (см. фиг.7). Например, если имеется четыре датчика, рассматриваемые векторы имеют размер четыре. В дальнейшем тексте описания «p» будет обозначать число датчиков группы близких датчиков.
На этапе 330 осуществляют моделирование, называемое «рекурсивным по времени», так как оно использует последние полученные оценки для обновления своих параметров. Так, в этом варианте выполнения настоящее изобретение применяет отношения между двумя последовательными моментами, так как они считаются коррелированными и когерентными. В вариантах выполнения для временной рекурсии используют два предыдущих момента.
Оптимальный порядок N моделирования не обязательно является известным. Предпочтительно этот оптимальный порядок N не определяют, чтобы получить результат в реальном времени. Наоборот, осуществляют рекурсию до достаточного большого порядка Nmax. Таким образом, получают достаточно большой набор моделей, чтобы они могли отобразить искомую информацию (структурные моды).
В варианте выполнения, показанном на фиг.3, этап 330 содержит этап 335 обработки симметричной взаимоспектральной матрицы, отображающей на своей главной диагонали спектральную плотность мощности каждого из датчиков и в своих членах вне диагонали - взаимные спектры.
Этап 335 содержит этап 340 рекурсии по времени с инициализацией в момент n для порядка N=0, содержащий рекурсию по порядку модели N=[1, 2, …, Nmax], следующих этапов:
- вычисление векторов погрешностей заднего и переднего линейного предсказания,
- вычисление матриц частичной передней и задней корреляции,
- вычисление ковариационных матриц погрешностей заднего и переднего линейного предсказания,
- вычисление матрицы степени погрешности переднего линейного предсказания,
- прямое вычисление векторов усиления, размером которых является число датчиков:
,
где альфа является скаляром, лямбда - коэффициентом упущения, и
- вычисление вектора
 посредством рекуррентности на основании известного
посредством рекуррентности на основании известного  и
и
- вычисление матриц Ak, отображающих модели, при k = от 1 до N.
На основании набора моделей, полученного после этапа 330, производят сортировку для извлечения структурных мод. Модели рассматриваются как отношения полиномов (так называемые модели «ARMA» от «AutoRegressive Moving Average» - авторегрессивное скользящее среднее). Для извлечения значений параметров, которые представляют структурные моды, ковариационные матрицы Еа и Eb минимизируют для каждого момента и для каждого порядка. Для этого вычисляют векторы θa и θb, которые представляют соответственно произведение обратной величины матрицы Еа на вектор εa и произведение обратной величины матрицы Eb на вектор εb.
Для осуществления этих вычислений в реальном времени вычисляют непосредственно вектор  для всех значений от 1 до Nmax. Затем, зная
для всех значений от 1 до Nmax. Затем, зная  , посредством рекуррентности вычисляют
, посредством рекуррентности вычисляют  .
.
Число матриц Ak (квадратных с размером р) коэффициентов моделей, оцениваемых в момент n для всех порядков от 1 до Nmax, равно Nmax×(Nmax-1)/2, то есть 105 при N=15.
Принцип классификации структурных мод состоит в том, что, если считать параметр при данном порядке релевантным, его можно будет найти в более высоком порядке. Классификация параметров является неконтролируемой и состоит в поиске подобных объектов в разных моделях. Как будет показано ниже, для этой классификации применяют построения траекторий.
На этапе 350 выдают параметры каждой из моделей, образующие совокупность избыточных данных, которая позволяет сократить дисперсию оценочных мод. Этап 350 содержит этап 355 извлечения параметров модели в зависимости от результата этапа адаптивного моделирования. Этап 355 содержит этап инверсии матрицы полиномов порядка N и размером, равным числу датчиков.
Этап 360 содержит этап 365 разложения Холецкого.
В своем втором частном варианте выполнения способ в соответствии с настоящим изобретением следует процедуре в реальном времени, описанной со ссылками на фиг.4 и предназначенной для анализа данных испытаний самолета на допуск к области полетных режимов. Этот вариант выполнения позволяет обрабатывать каждую информацию до появления следующей, без учета вводимого возбуждения конструкции.
Все характеристики метода полностью отвечают упомянутым во вступительной части требованиям безопасности и снижения затрат и позволяют улучшить процедуру допуска к области полетных режимов за счет более эффективного модального анализа.
Анализируемыми сигналами являются измерения ускорений, производимые на первичной конструкции самолета.
Каждая из операций процедуры анализа в реальном времени р сигналов типа ускорения, описанной со ссылками на фиг.4, подробное описана в нижеследующих разделах.
На первом этапе 405 способа анализа осуществляют «устранение шумов» в р сигналах, поступающих от р датчиков одной и той же группы близких датчиков, например, при помощи пирамидального алгоритма, предложенного С. Малла, с использованием ортонормированных баз элементарных волн. Этот алгоритм впервые упомянут в работах Берта и Адельсона, датируемых 1983 годом и относящихся к отображению и сжатию изображений. Этот алгоритм, являющийся исключительно простым в применении, отличается вычислительной нагрузкой, пропорциональной числу обрабатываемых выборок.
Нелинейный характер обработки усложняет применение, тем более что комплект фильтра не является каузальным. Фильтры выполнены, как показано на фиг.5, с применением элементарных волн.
Применение алгоритма Малла происходит исключительно в реальном времени, и в целом он сводится к одновременной обработке р выборок в каждый момент. Применяемый принцип основан на передискретизации сигнала, чтобы обеспечить устранение шума путем анализа и синтеза.
Таким образом, на этапе 405 сначала осуществляют этап 406 разложения сигналов на поддиапазоны. В ходе этого анализа или разложения последовательность, сформированную при дискретизации непрерывного сигнала, рассматривают в первое время как аппроксимацию этого сигнала по определенной шкале, связанной с дискретизацией (по сути дела дискретизация соответствует более мелкой шкале).
Условно эта шкала аппроксимации соответствует j=0. Таким образом, в качестве исходных берут данные, которые принадлежат к подпространству v0: последовательность выборок {x0,x1,…xk,…}=〈ƒ|ϕ0,k〉, при этом k∈Z представляет собой набор данных, которые необходимо анализировать. Отношением между подпространствами приближения является vj-1=vj⊕wj. Следовательно, достаточно разложить дискретный сигнал, то есть последовательность выборок, на два подпространства v1 и w1, чтобы получить последовательность выборок с разрешением 2-1, то есть 〈ƒ|ψ1,k〉 и 〈ƒ|ϕ1,k〉. Следующие уравнения дают рекуррентное соотношение для двух последовательных разрешений:
〈ƒ|ϕj,k〉= 〈ƒ|ϕj-1,n〉 и 〈ƒ|ψj,k〉=
〈ƒ|ϕj-1,n〉 и 〈ƒ|ψj,k〉= 〈ƒ|ϕj-1,n〉.
〈ƒ|ϕj-1,n〉.
Эти уравнения представляют соответственно произведения свертки g-n*〈ƒ|ϕj-1,n〉 и h-n*〈ƒ|ϕj-1,n〉, после которых следует децимация на два. Таким образом, коэффициенты аппроксимации 〈ƒ|ϕj,k〉 и детализации 〈ƒ|ψj,k〉 по шкале j вычисляют на основании коэффициентов, полученных по шкале j-1, посредством простой операции фильтрования при помощи фильтров Ĝ(ƒ) и Ĥ(ƒ) с последующей децимацией.
 Затем осуществляют этап 407 определения пороговых значений коэффициентов разложения, во время которого оставляют только коэффициенты первого поддиапазона.
Затем осуществляют этап 407 определения пороговых значений коэффициентов разложения, во время которого оставляют только коэффициенты первого поддиапазона.
После этого осуществляют этап 408 синтеза или реконструкции, во время которого реконструкцию сигнала на оснований известности проекций на подпространства аппроксимации производят следующим образом:
 .
.
Реконструкция является операцией, дуальной относительно предыдущей. Ее осуществляют посредством цифрового фильтрования, которому предшествует интерполяция на коэффициенты аппроксимации и детализации, полученные в результате разложения.
Общая структура «устройства устранения шума» представлена на фиг.6. Следует отметить, что рассматриваемая максимальная частота представляет собой половину частоты f дискретизации. В необработанном сигнале искомый сигнал находится в диапазоне самых низких частот. После разложения сигнала на частотные полосы от 0 до f/16, от f/16 до f/8, от f/8 до f/4 и от f/4 до f/2 производят определение порогов путем установки на ноль коэффициентов элементарных волн. Затем осуществляют синтез для выдачи незашумленного сигнала, который содержит искомый сигнал.
Затем на этапе 410 осуществляют адаптивное моделирование типа ARMA («AutoRegressive Moving Average»). Этот этап моделирования сигнала является параметрическим, что позволяет получить спектральный анализ рассматриваемого сигнала, и рекурсивным по времени, по порядку и по пространству датчиков.
Этап 410 содержит этап 411 определения вектора переднего линейного предсказания и вектора заднего линейного предсказания. В применении к векторному случаю каждое определение вектора предсказания состоит в том, чтобы выразить  в виде линейной комбинации из N последних векторов выборок, как показано на фиг.7, где представлено переднее линейное предсказание в векторном виде в пространстве р датчиков.
в виде линейной комбинации из N последних векторов выборок, как показано на фиг.7, где представлено переднее линейное предсказание в векторном виде в пространстве р датчиков.
Таким образом, речь идет о моделировании сигнала непосредственно в промежутке времени. Если  является последовательностью выборок, то моделью является:
является последовательностью выборок, то моделью является:
 .
.
Следует напомнить, что компонентами вектора  являются р текущих выборок р датчиков. В этом выражении Ak являются матрицами размера р, которые соответствуют числу датчиков, при этом N является порядком моделирования.
являются р текущих выборок р датчиков. В этом выражении Ak являются матрицами размера р, которые соответствуют числу датчиков, при этом N является порядком моделирования.
Обобщение скалярных методов дает новую запись погрешности и ее предсказания:


С внешней точки зрения  является выходом из фильтра RIF, возбуждаемого векторной последовательностью выборок . Свойство линейности позволяет инвертировать процесс: при этом становится выходом из фильтра, возбуждаемого
является выходом из фильтра RIF, возбуждаемого векторной последовательностью выборок . Свойство линейности позволяет инвертировать процесс: при этом становится выходом из фильтра, возбуждаемого  . Этот фильтр получают путем инверсии полиномиальной матрицы Ф(z), он является стабильным фильтром типа БИХ (с бесконечной импульсной характеристикой).
. Этот фильтр получают путем инверсии полиномиальной матрицы Ф(z), он является стабильным фильтром типа БИХ (с бесконечной импульсной характеристикой).
Для определения заднего линейного предсказания оценку  для
для  выражают в виде линейной комбинации векторов
выражают в виде линейной комбинации векторов  . При этом свойства аналогичны свойствам, полученным для переднего линейного предсказания.
. При этом свойства аналогичны свойствам, полученным для переднего линейного предсказания.
Затем на этапе 412 осуществляют вычисление ковариационных матриц и матриц передней и задней частичной корреляции и матриц степеней погрешностей переднего и заднего предсказания.
После этого минимизируют ковариационную матрицу погрешностей переднего и заднего линейного предсказания, априори и апостериори, построенную на основании ранее определенных понятий переднего и заднего линейного предсказания. Ковариационную матрицу погрешности переднего и заднего линейного предсказания определяют как:
 ,
,
где 0<<λ≤1 называют коэффициентом упущения или адаптации.
На этапе 415 получают коэффициентные матрицы модели порядка N для всех значений N. Для этого на этапе 416 получают оптимальный вектор  , когда ковариационная матрица
, когда ковариационная матрица  является минимальной, то есть:
является минимальной, то есть:
 .
.
На этапе 417 аналогичные рассуждения, основанные на оценке ковариационной матрицы погрешности заднего линейного предсказания, априори дают:
 .
.
В рамках расширения для множества датчиков алгоритм, называемый «ESA», позволяет вычислить два следующих вектора:

 .
.
Вектор  , вычисленный напрямую при помощи алгоритма «ESA», является произведением матрицы на вектор. Матрица является взвешенной суммой до момента n+1 диадического произведения вектора
, вычисленный напрямую при помощи алгоритма «ESA», является произведением матрицы на вектор. Матрица является взвешенной суммой до момента n+1 диадического произведения вектора  , и вектор является тем же самым вектором в момент n+1, то есть
, и вектор является тем же самым вектором в момент n+1, то есть  .
.
Вектор  получают посредством рекуррентности на основании
получают посредством рекуррентности на основании  .
.
Затем на этапе 420 решают обратную задачу, то есть извлечение параметров моделей на основании используемых для случая с множеством датчиков и описанных выше уравнений модели (1) и (2):
где  является полиномиальной матрицей по z порядка N=[1, Nmax] размером р×р, где р является числом анализируемых датчиков.
является полиномиальной матрицей по z порядка N=[1, Nmax] размером р×р, где р является числом анализируемых датчиков.
 является неизвестным вектором погрешности, но его ковариационная матрица определена путем оценки. Таким образом, для ее получения вычисляем:
является неизвестным вектором погрешности, но его ковариационная матрица определена путем оценки. Таким образом, для ее получения вычисляем:

или взаимоспектральную матрицу:
 .
.
Эта матрица является симметричной, на ее главной диагонали представлена спектральная плотность мощности каждого из датчиков. Члены вне диагонали являются взаимными спектрами. Извлечение параметров моделей состоит в осуществлении в каждый момент и для каждого порядка инверсии матрицы полиномов порядка N и размером р: Ф(z).
Для этого путем разложения Холецкого матрицы  получаем:
получаем:
 ,
,
где
 .
.
Полиномы F являются числителями различных передаточных функций, при этом знаменателями (по сути единственным знаменателем по теореме о суперпозиции) являются собственные значения.
Возьмем 
 .
.
Коэффициентами числителя являются квадратные корни из N+1 элементов N+1-ого столбца взаимоспектральной матрицы (без знака).
Обработка адаптивного моделирования показана на фиг.8. В этой схеме обработки моделирования для множества датчиков показано взаимное перекрывание трех рекурсий 805, 810 и 815.
Затем на этапе 425 осуществляют классификацию мод. В каждый момент производят оценку N моделей размером {1:p:N*p}, где р является числом датчиков. Извлечение параметров каждой из моделей (значения частоты и ослабления) является совокупностью избыточных данных, которая позволяет сократить дисперсию оценки. Далее производят классификацию этих данных, полученных при моделировании, с соблюдением определенного критерия при следующих условиях:
- из одной и той же модели получают только одну моду на класс,
- все оценки имеют одинаковый весовой коэффициент независимо от происхождения оценки.
Отсутствие априорного знания (в частности, плотности) заставляет отдавать приоритет методу неконтролируемой классификации типа «динамических облаков», которая состоит в нахождении естественных (имплицитных) классов для объединения не маркированных данных.
Этот метод, показанный на фиг.9, достаточно удовлетворительно отвечает всем требованиям по следующему алгоритму:
- на этапе 426 осуществляют выбор первоначального разделения на К классов,
- на этапе 427 производят систематический поиск наилучшего класса для каждых данных; вычисляют расстояния данных до барицентров и элемент относят к классу, центр которого находится к нему ближе всего (используя, например, евклидово расстояние или расстояние Куллбэка-Лейблера), и
- на этапе 428 производят обновление барицентров «передающего» класса и «принимающего» класса.
Затем возвращаются на этапы 427 и 428 до достижения сходимости.
На этапе 430 производят построение траекторий мод.
Проблема состоит в отслеживании в реальном времени траекторий совокупности мишеней, соответствующих частотам мод, число которых меняется во времени. Структура алгоритма построена вокруг фильтра Кальмана для каждой отслеживаемой дорожки. Когда на основании моделей выдают набор «измерений», стараются их коррелировать с существующими дорожками. В данном случае задача состоит в том, чтобы выбрать среди полученных измерений те измерения, которые могут происходить из мишени, на основании которой предсказывают измерение. Часто применяемый принцип состоит в том, что определяют окно, обычно называемое «gating», вокруг осуществленного предсказания.
Общая архитектура обработки основана на следующих принципах:
- Предсказание состояния в момент n+1 при известности n на основании известных траекторий.
- Получение связи измерения-мишени путем сравнения измерений с измерениями, предсказанными на основании известных траекторий. Эта обработка должна позволять не только сохранять уже существующие дорожки, но и инициализировать новые и, в случае необходимости, устранять те дорожки, которые соответствуют мишеням, покинувшим пространство наблюдений. Эффективность устройства отслеживания дорожек зависит именно от качества этих функций.
- Фильтрование коэффициента усиления Кальмана с обновлением состояния, а также ковариационных матриц.
В этой процедуре фильтр Кальмана позволяет отслеживать несколько мишеней, где предсказание имеет фундаментальное значение. Для каждой мишени он дает фильтрованную оценку состояния при минимальной дисперсии, предсказывает состояние и обеспечивает вычисление «gating».
Решение основано на совокупности двух систем уравнений предсказания и фильтрования, а именно:
Уравнения предсказания







Окно подтверждения позволяет выбрать для каждой мишени измерения, которые могут принадлежать к этой мишени. Принцип состоит в определении зоны, объема в пространстве наблюдений вокруг предсказанного измерения. Размер этой зоны определяют, благодаря статистическим свойствам предсказанного измерения (в данном случае гауссова измерения). «Размер» этого объема необходимо выбирать очень тщательно. По сути дела от него зависит сортировка измерений и вероятность нахождения измерения, получаемого от этой мишени, внутри поверхности, ограничивающей этот объем.
Окно подтверждения показано на фиг.10.
Технология установления связи измерение-мишень является центральной частью процедуры отслеживания мишени. Существует много технологий, некоторые из которых не управляют появлением и исчезновением дорожек. Следовательно, необходимо предусматривать дополнительный механизм для такого управления. Наиболее простым является соблюдение следующих правил:
- Правило 1: любое измерение, не связанное с какой-либо существующей дорожкой, рассматривают как инициализацию новой дорожки.
- Правило 2: дорожку подтверждают (обнаруживают), если с ней связаны, по меньшей мере, Nd последовательных измерений.
- Правило 3: дорожку считают исчезнувшей, если с ней не связаны, по меньшей мере, Ni последовательных измерений.
Венгерский метод позволяет решить задачу присвоения оценки-измерения за счет поиска минимальной стоимости, благодаря следующему частному методу решения:
Предположим, что для m задач присваивают m ресурсов, и что С является матрицей стоимости присвоения. Любое присвоение определяют m парами, обозначаемыми (1, x), (2, y), …, (k, t), …, (m, u) при (x, y, …, u): перестановка {1, 2, …, m}. Отдельному присвоению соответствует расход или общая стоимость:
F(x, y, …, t, …, u)=C1,x+C2,y+…+Ck,t+…+Cm,u.
Задача состоит в определении (x, y, …, t, …, u) таким образом, чтобы F было минимальным.
Для применения способа в соответствии с настоящим изобретением в предпочтительном варианте выполнения настоящего изобретения предусматривают компьютер общего назначения, содержащий компьютерную программу, загружаемую в этот компьютер, при этом упомянутая программа содержит команды для осуществления подробно описанных выше этапов и алгоритмов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ коррекции углов ориентации ЛА по сигналам от одноантенной СНС | 2022 |
|
RU2790081C1 |
| Способ коррекции бесплатформенной инерциальной навигационной системы | 2016 |
|
RU2646954C2 |
| Способ выставки БИНС ЛА корабельного базирования и устройство для его осуществления | 2016 |
|
RU2635398C2 |
| СПОСОБ ОЦЕНКИ НАВИГАЦИОННОГО СОСТОЯНИЯ В УСЛОВИЯХ ОГРАНИЧЕННОЙ ВОЗМОЖНОСТИ НАБЛЮДЕНИЯ | 2015 |
|
RU2701194C2 |
| Адаптивная бесплатформенная инерциальная курсовертикаль | 2016 |
|
RU2647205C2 |
| Способ распознавания характера полета пары самолетов при её сопровождении на основе калмановской фильтрации и нейронной сети | 2024 |
|
RU2829836C1 |
| СПОСОБ БОНДАРЕНКО А.В. ПОЛУЧЕНИЯ РАДИОТЕХНИЧЕСКОЙ ИНФОРМАЦИИ И РАДИОТЕХНИЧЕСКИЙ КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2599259C1 |
| РЕЗЕРВНАЯ СИСТЕМА ДЛЯ ИНДИКАЦИИ КУРСА И ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ НА САМОЛЕТЕ | 2000 |
|
RU2236697C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВОГО ПОЛОЖЕНИЯ УПРАВЛЯЕМОГО АППАРАТА, ПОДВЕШЕННОГО К САМОЛЕТУ-НОСИТЕЛЮ | 2014 |
|
RU2553776C1 |
| Малогабаритная адаптивная курсовертикаль | 2016 |
|
RU2714144C2 |
Группа изобретений относится к частотному анализу данных. В частности, к анализу данных испытаний самолетов на допуск к области полетных режимов. Способ частотного анализа данных, отличающийся тем, что содержит: этап (310) ввода сигналов, поступающих от первого датчика, этап (315) ввода сигналов, поступающих, по меньшей мере, от второго датчика, при этом каждый второй датчик расположен вблизи первого датчика, чтобы сигналы, поступающие от каждого второго датчика, были сильно коррелированными с сигналами, поступающими от первого датчика, этап оценки для каждого датчика передаточной функции или модели, реализуемой на основании совокупности сигналов от первого датчика и от каждого второго датчика, и этап (320) извлечения структурных свойств системы на основании каждой из оценочных моделей. Также заявлен компьютерный программный продукт, реализующий способ. 2 н. и 17 з.п. ф-лы, 10 ил.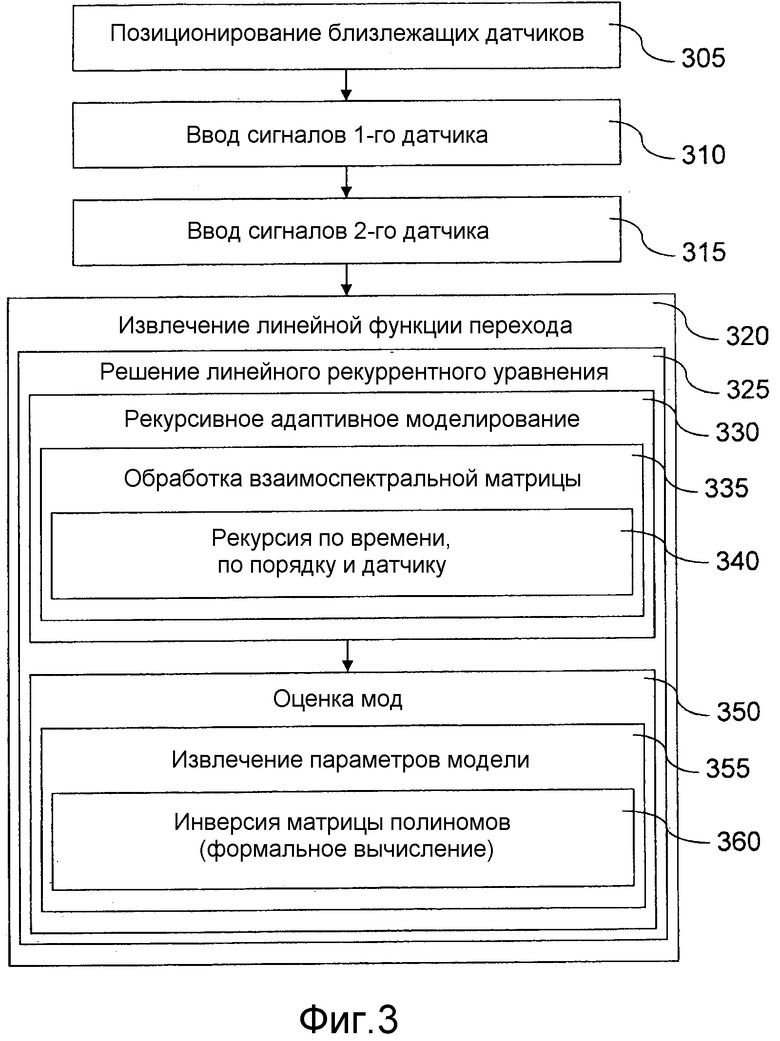
1. Способ частотного анализа данных, отличающийся тем, что содержит: этап (310) ввода сигналов, поступающих от первого датчика, этап (315) ввода сигналов, поступающих, по меньшей мере, от второго датчика, при этом каждый второй датчик расположен вблизи первого датчика, чтобы сигналы, поступающие от каждого второго датчика, были сильно коррелированными с сигналами, поступающими от первого датчика, этап оценки для каждого датчика передаточной функции или модели, реализуемой на основании совокупности сигналов от первого датчика и от каждого второго датчика, и этап (320) извлечения структурных свойств системы на основании каждой из оценочных моделей.
2. Способ по п.1, отличающийся тем, что во время этапа (320) извлечения сигналы, поступающие от датчиков, рассматривают как полиномы.
3. Способ по п.1, отличающийся тем, что во время этапа (320) извлечения решают рекуррентное линейное уравнение с коэффициентами, медленно меняющимися во времени и в пространстве между датчиками.
4. Способ по п.2, отличающийся тем, что во время этапа (320) извлечения решают рекуррентное линейное уравнение с коэффициентами, медленно меняющимися во времени и в пространстве между датчиками.
5. Способ по п.1, отличающийся тем, что этап (320) извлечения содержит: этап адаптивного моделирования, рекурсивного по времени, порядку и пространству датчиков, и этап оценки мод для каждого порядка в зависимости от результата этапа адаптивного моделирования.
6. Способ по п.2, отличающийся тем, что этап (320) извлечения содержит: этап адаптивного моделирования, рекурсивного по времени, порядку и пространству датчиков, и этап оценки мод для каждого порядка в зависимости от результата этапа адаптивного моделирования.
7. Способ по п.3, отличающийся тем, что этап (320) извлечения содержит: этап адаптивного моделирования, рекурсивного по времени, порядку и пространству датчиков, и этап оценки мод для каждого порядка в зависимости от результата этапа адаптивного моделирования.
8. Способ по п.4, отличающийся тем, что этап (320) извлечения содержит: этап адаптивного моделирования, рекурсивного по времени, порядку и пространству датчиков, и этап оценки мод для каждого порядка в зависимости от результата этапа адаптивного моделирования.
9. Способ по любому из пп.5-8, отличающийся тем, что каждый этап ввода сигналов, поступающих от датчиков, содержит этап снижения в реальном времени уровня шума сигналов, поступающих от датчиков, предшествующий этапу адаптивного моделирования.
10. Способ по п.5, отличающийся тем, что этап оценки мод содержит этап извлечения параметров модели в зависимости от результата этапа адаптивного моделирования.
11. Способ по п.10, отличающийся тем, что этап извлечения параметров модели содержит этап инверсии матрицы полиномов порядка N и размером, равным числу датчиков.
12. Способ по любому из пп.5-8, отличающийся тем, что этап оценки мод осуществляют таким образом, чтобы получить параметры каждой из моделей, образующие совокупность избыточных данных, позволяющую сократить дисперсию оценочных мод.
13. Способ по любому из пп.5-8, отличающийся тем, что на этапе адаптивного моделирования осуществляют моделирование параметрического типа.
14. Способ по любому из пп.5-8, отличающийся тем, что на этапе адаптивного моделирования осуществляют моделирование типа ARMA («авторегрессивное скользящее среднее»).
15. Способ по п.14, отличающийся тем, что упомянутое моделирование типа ARMA осуществляют в каждый момент, для каждого датчика и для всех рассматриваемых порядков.
16. Способ по любому из пп.5-8, отличающийся тем, что содержит этап инверсии полиномиальной матрицы, которая является симметричной взаимоспектральной матрицей, отображающей на своей главной диагонали спектральную плотность мощности каждого из датчиков и в других членах - взаимные спектры.
17. Способ по любому из пп.5-8, 10-11 или 15, отличающийся тем, что этап адаптивного моделирования содержит рекурсию по времени с инициализацией в момент n для порядка N=0, содержащую рекурсию по порядку модели N=[1, 2, …, Nmax], следующих этапов: вычисление векторов погрешностей заднего и переднего линейного предсказания, вычисление матриц частичной передней и задней корреляции, вычисление ковариационных матриц погрешностей заднего и переднего линейного предсказания, вычисление матрицы степени погрешности переднего линейного предсказания, прямое вычисление векторов усиления
где альфа является скаляром, лямбда - коэффициентом упущения и 


18. Способ по любому из пп.1-8, 10-11 или 15, отличающийся тем, что содержит этап классификации мод, полученных в результате этапа оценки мод, с соблюдением одного из следующих двух условий: из одной и той же модели получают только одну моду на класс, и все оценки имеют одинаковый весовой коэффициент независимо от происхождения оценки.
19. Компьютерный носитель, содержащий программу, при этом упомянутая программа содержит команды, позволяющие выполнять способ по любому из пп.1-8, 10 и 11.
| US 6195982 B1, 06.03.2001 | |||
| US 6574570 B1, 03.06.2003 | |||
| US 6947858 B2, 20.09.2005 | |||
| US 5610837 A1, 11.03.1997. |

