Изобретение относится к оптическим прицелам систем наведения управляемых объектов и может быть использовано в системах управления с телеориентцией управляемых объектов в луче лазера.
Известен способ наведения управляемых объектов (УО) первого поколения, заключающийся в наведении наводчиком (оператором) на цель линии прицеливания, глазомерном измерении отклонения от нее трассера управляемого объекта и воздействие на органы управления УО в соответствии с этими отклонениями до совмещения УО с целью (А.Н.Латухин «Противотанковое вооружение». М., Воениздат, 1974, с.192-236). К первому поколению таких систем относятся, например, французские комплексы SS-10, SS-12, западногерманская «Кобра», отечественные «Фаланга», «Малютка» и др.
Этим способам наведения присущ ряд недостатков, существенным из которых является необходимость непрерывного визуального слежения за УО и целью и управление УО на всей траектории. Поэтому к наводчику предъявляются строгие требования при обучении правилам стрельбы и практическим навыкам.
Для обучения и периодических тренировок наводчиков УО с ручной системой наведения требуются сложные электронно-оптические тренажеры. Кроме того, при таком способе управления практически невозможно устранить один из основных недостатков - низкую скорость полета УО. При увеличении скорости полета УО работа наводчика сильно усложняется, поскольку управление обычно осуществляется с помощью команд, основанных на учете взаимного положения УО и цели. Наводчик физически не успевает своевременно отреагировать на изменение направления полета скоростного УО. Наводчик испытывает также значительные трудности при выводе УО на линию прицеливания. Для избежания клевка УО о землю вблизи пусковой установки УО придают значительный угол возвышения, в результате чего образуется значительная необстреливаемая зона.
Известен ряд систем наведения УО с телеориентацией УО в лазерном растре, центр которого направлен на цель (Патент РФ №2126522, МКИ F41G 7/26, 20.02.99; Патент РФ №2126946, МКИ F41G 7/26, 25.11.97). В этих системах используется способ наведения, предусматривающий союстировку визирного канала и канала наведения в оптическом прицеле, наблюдение цели оператором с помощью визирного канала оптического прицела, слежение за целью и управление объектом посредством канала наведения оптического прицела. Наведение визирного канала на цель осуществляется наводчиком по двум угловым координатам и осуществляется с помощью датчика команд (ДК). ДК представляет собой электронно-механическое устройство, состоящее из кнюпеля (поворотное устройство), шарнирно связанного с датчиками углового положения оптического прицела (ОП). Наводчик, перемещая кнюпель, задает скорость наведения ОП по угловым координатам и с помощью светящихся марок, например окружностей или стрелок, имеющихся на мониторе визирного канала (или в окуляре ОП), наводит линию визирования ОП, совмещенную с линией нулевых сигналов лазерного растра канала управления, на цель. Наведение УО осуществляется в информационном лазерном растре, в котором обеспечены требуемые линейные размеры лазерного растра на текущей дальности полета УО. Кодирование лазерного растра осуществляется с помощью оптического модулятора, либо за счет сканирования лазерного пучка акустооптическими дефлекторами.
Управление объектом в информационном поле осуществляется с помощью фотоприемного устройства, установленного в его хвостовой части и принимающего лазерное излучение. Бортовой аппаратурой сигналы преобразуются в команды управления рулями, с помощью которых УО удерживается в центре информационного поля канала наведения.
Этот способ от предшествующего отличается тем, что наводчик лишь совмещает прицельную марку (перекрестье) визирного канала оптического прицела с целью, формируя линию прицеливания, путем совмещения оптической оси прицела с направлением на цель, а наведение УО осуществляется автоматически но сигналам рассогласования, пропорциональным угловым отклонениям УО от линии нулевых сигналов управления информационного поля канала наведения.
Угловая ошибка наведения УО на цель при таком способе наведения состоит из следующих ошибок:
- угловой ошибки разъюстировки, возникающей из-за неточной союстировки оптической оси визирною канала прицела, определяющей линию прицеливания, оптической оси передающего модуля канала наведения, определяющей линию нулевых сигналов информационного поля канала наведения;
- динамической ошибки УО, возникающей из-за отклонения УО при его движении в информационном поле системы наведения от линии нулевых сигналов этого поля;
- угловой ошибки слежения, возникающей при совмещении наводчиком перекрестья визирного канала оптического прицела с целью.
Первые две ошибки сводятся к минимуму при конструировании прицела, содержащего визирный канал и канал управления лазерной системы телеориентации и при проектировании бортовой аппаратуры УО.
Третья ошибка зависит от квалификации наводчика и составляет при средней квалификации наводчика 0,4-0,6 мрад и 0,2-0,3 мрад при высокой квалификации (Патент РФ №2217681, МПК 7 F41G 7/20, 19.07.2001).
Так как рассогласование прицельной марки (перекрестья) визирного канала оптического прицела относительно цели определяется наводчиком визуально, то точность формирования линии прицеливания, совмещение прицельной марки и цели зависит от его квалификации.
При визуальном обнаружении и сопровождении цели существенное влияние на точность, а порой и на возможность использования системы, оказывают погодные условия и фоновая обстановка.
Поэтому к недостаткам этого способа наведения следует отнести зависимость точности наведения от квалификации наводчика, которая ухудшается при слежении в сложной фоноцелевой обстановке и при слежении за движущимися целями.
Отметим, что в ряде современных оптических прицелов систем управления с телевизионными и/или тепловизионными камерами (ТК) используются автоматы сопровождения цели (АСД), в которых, после обнаружения цели наводчиком на мониторе, на цель накладывается строб сопровождения и АСЦ автоматически по заданному алгоритму сопровождает стробом цель и вырабатывает сигналы рассогласования - координаты цели относительно линии визирования (В.В.Молебный. Оптико-локационные системы. М.: «Машиностроение», 1981 г., глава 4). Выходные сигналы АСЦ подаются на приводы оптического прицела, которые разворачивают оптический прицел до уменьшения сигналов рассогласования и таким образом осуществляется автоматическое слежение за целью.
Такие автоматизированные системы сопровождения цели также имеют угловую ошибку слежения, связанную с угловой ошибкой приводов при сопровождении цели, особенно в условиях слежения за движущейся маневрирующей целью и при работе в движении.
Целью изобретения является повышение точности наведения управляемого объекта на цель.
Поставленная цель достигается за счет того, что в способе прицеливания и наведения управляемого объекта, заключающемся в слежении линии прицеливания за целью, формировании информационного поля канала наведения, линия нулевых сигналов управления которого совмещена с линией прицеливания, при этом производят измерение текущего углового отклонения цели относительно линии прицеливания и осуществляют разворот линии нулевых сигналов управления информационного поля канала наведения от линии прицеливания, пропорционально измеренному угловому отклонению цели.
Определение угловых координат цели φx и φy относительно линии прицеливания (оптической оси прицела) при слежении за ней и смещение линии нулевых сигналов управления канала наведения от линии прицеливания, пропорционально измеренным угловым координатам цели, позволило обеспечить повышение точности наведения управляемого объекта на цель, особенно при работе в движении и при поражении движущейся и маневрирующей цели за счет устранения ошибок слежения оператора или автоматических приводов прицела.
На Фиг.1-3 приведены чертежи, поясняющие способ прицеливания и наведения управляемых объектов.
На Фиг.4 приведена блок-схема оптической системы прицеливания и наведения управляемых объектов.
На Фиг.1 условно представлен экран монитора телевизионного (или тепловизионного) канала, прицельная марка в виде стрелки, верхний конец которой совмещен с оптической осью прицела, изображение цели с координатами φx и φy и строб захвата автомата сопровождения (строб AC).
Перекрестье осей У и X соответствует положению точки прицеливания, совпадающей с оптической осью прицела и соответственно с линией прицеливания (ЛП). Цель смещена относительно точки прицеливания из-за ошибки слежения, но она находится в стробе слежения автомата сопровождения цели.
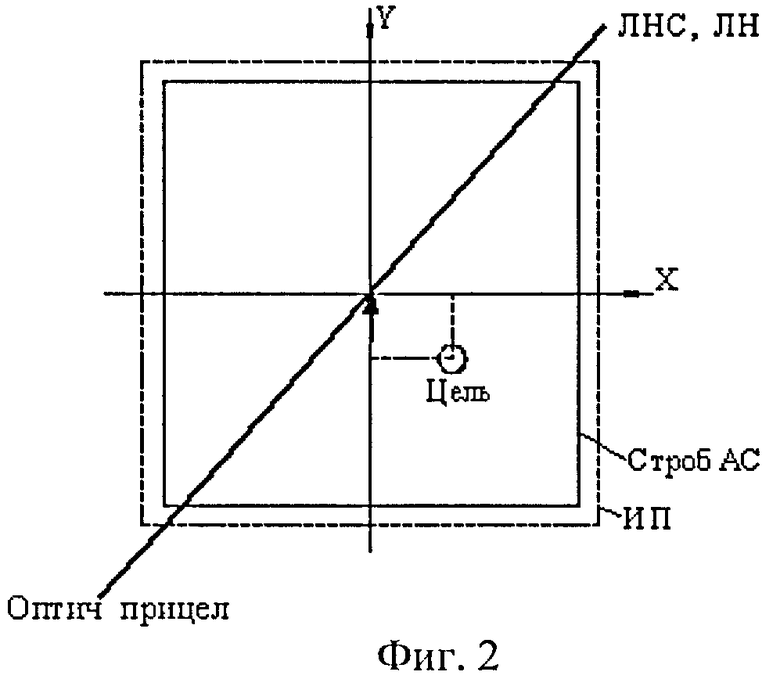
На Фиг.2 условно изображено информационное поле (ИП) канала наведения для прототипа, когда линия нулевых сигналов (ЛНС) управления (центр лазерного растра) совмещена с ЛП, но при этом имеется угловая ошибка слежения за целью, находящейся в стробе автомата сопровождения.
На Фиг.3 условно изображено информационное поле (ИП) канала наведения для предлагаемого способа наведения, когда ЛНС управления смещена относительно ЛП на величину Δφ, соответствующую координатам цели φx и φy, измеренным автоматом сопровождения.
Из рассмотрения Фиг.2 и 3 следует, что производя постоянную корректировку ЛНС управления информационного поля канала наведения относительно ЛП оптического прицела путем углового смещения ЛНС управления от ЛП на величину, пропорциональную величине измеренных телевизионным (тепловизионным) каналом координат цели, тем самым исключают ошибку, возникающую во время слежения оператором за целью, и, как следствие, повышают точность наведения управляемого объекта на движущуюся цель.
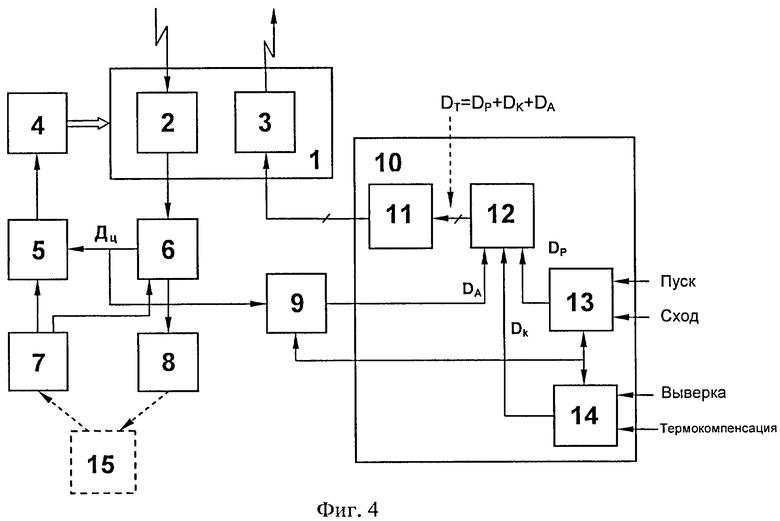
Устройство, поясняющее предлагаемый способ прицеливания и наведения (Фиг.4), состоит из оптического прицела 1, в котором размещены оптически сопряженные телевизионный или тепловизионный канал 2 и передающий модуль (ПМ) канала наведения (КН) лазерной системы телеориентации 3, привод наведения и стабилизации оптического прицела 4, блок преобразования сигналов управления 5, автомат сопровождения цели (АСЦ) 6, датчики команд управления (ДКУ) приводами и АСЦ 7, монитор (видеоконтрольное устройство) 8, блок масштабирования 9, блок электронный управления лазерной системы телеориентации 10. На Фиг.4 условно представлен наводчик 15.
Блок электронный управления лазерной системы телеориентации 10, при использовании ПМ на основе сканирования лазерного излучения акустооптическими дефлекторами (Патент РФ №2243626, МКИ H04B 10/10, 14.04.2003), содержит блок формирования кодов растра и синхросигналов 13 (БФКР и СС), блок формирования сигналов коррекции 14 (БФСК), многовходовый сумматор 12 и двухканальный синтезатор частот 11.
Способ наведения осуществляется следующим образом. В оптическом прицеле 1 перед началом работы телевизионный (тепловизионный) канал (ТК 2) и передающий модуль канала наведения 3 взаимно съюстированный, т.е. при создании информационного поля управления канала наведения линия нулевых сигналов управления (центр ИП) совпадает с линией прицеливания оптического прицела, определяемой перекрестьем на экране видеоконтрольного устройства (монитора) 8 телевизионного (тепловизионного) канала 2, как представлено на Фиг.2.
Наводчик 15, обнаружив изображение цели на экране монитора 8, перемещая кнюпель управления приводами ДКУ 7, задает скорость наведения ОП по угловым координатам и, управляя приводами оптического прицела 1, старается совместить перекрестье на экране монитора 8 с целью. На экране монитора имеется изображение строба захвата цели, которое в исходном состоянии, без автосопровождения цели, периодически меняет яркость. При вводе изображения цели внутрь строба слежения наводчик нажимает кнопку «Захват» ДКУ 7 и прицел переходит в режим автоматического слежения за целью, стараясь совместить перекрестье прицела (линию визирования) с целью. В режиме автосопровождения изображение строба захвата цели на экране монитора яркость не меняет. Цель находится внутри строба сопровождения, но из-за ошибок приводов она смещена относительно линии прицеливания на углы φx и φy, как представлено на Фиг.1. АСЦ 6 величину этого углового рассогласования преобразует в сигналы команд управления, которые поступают через БПСУ 5 на приводы 4 прицела 1, для слежения за целью, а также поступают на БМ 9. Выходные сигналы Da блока масштабирования 9 поступают на сумматор 12 блока электронного 10. В сумматоре 12 эти сигналы суммируются с внутренними сигналами Dp, Dк, вырабатываемые соответственно блоком формирования кодов растра и синхросигналов 13 и блоком формирования сигналов коррекции 14. Сигналы Dp обеспечивают формирование лазерного растра с заданными размерами в текущий момент времени. Сигналы Dк обеспечивают начальное смещение лазерного растра при начальной юстировке прицела (Фиг.4). На выходе сумматора 12 формируются коды Dт, которые подаются в двухканальный синтезатор частот 14. В нем коды Dт преобразуются в перестраиваемые во времени высокочастотные сигналы управления fzc и fyc. Эти сигналы подаются на акустооптический дефлектор передающего модуля канала наведения 3, вызывая угловое смещение ЛНС управления от ЛП на величину, пропорциональную величине измеренных телевизионным (тепловизионным) каналом координат цели (Фиг.2).
Блок масштабирования 9 обеспечивает сопряжение величин команд целеуказания и углового смещения ЛНС управления от ЛП.
Пусть величина вектора угловых координат цели относительно перекрестья прицела, измеренная АСЦ, равна  . Его проекции на координатные оси x и y равны φx и φy (Фиг.1).
. Его проекции на координатные оси x и y равны φx и φy (Фиг.1).
Модуль вектора угловых координат цели может быть записан в виде
где ho - величина смещения цели в фокальной плоскости входного объектива ТК, имеющего фокусное расстояние Fo.
Иначе можно написать: φц·Kо=Dц,
где Kо - коэффициент пропорциональности,
Dц - числовой код положения цели, смещенной на угол φц относительно линии прицеливания. Код Dц формируется на выходе АСЦ и, следовательно, он равен 
Угол отклонения лазерного пучка на выходе ПМ KH определяется выражением γд=Kд·Da·Гп,
где Kд - совместный коэффициент пропорциональности для синтезатора частот и акустооптического дефлектора,
Гп - кратность выходного телескопа ПМ,
Da - величина кода управления, поданная на вход синтезатора частот.
Так, например, для акустооптического дефлектора из монокристалла парателлурита и синтезатора частот, имеющего 13-разрядный вход управления по каждому каналу, совместный коэффициент пропорциональности Kд равен 1,35 угл. секунды на единицу команды управления.
Учитывая, что для компенсации угловых ошибок приводов угловое смещение ЛНС управления должно быть равно величине измеренных телевизионным (тепловизионным) каналом угловых координат цели, т.е. φц=γд, определим коэффициент передачи блока масштабирования 9 в виде: Kбм=Da/Dц=(Kд·Kо·Гп)-1.
Таким образом, после подачи команды «Пуск» и схода управляемого изделия, при отсутствии специальных команд превышения, оно летит по линии нулевых команд управления, совмещенной с целью.
Уменьшение ошибки наведения в процессе слежения приводом прицела за подвижной целью обусловлено тем фактом, что полоса частот привода слежения мала и составляет, как правило, единицы Гц. Это связано с достаточно большими массами следящих зеркал или всей аппаратуры прицела, которые должен переместить привод слежения прицела. Полоса частот управления лазерного канала управления при использовании малоинерционных акустооптических дефлекторов для управления угловым положением лазерного пучка управления превышает 100 Гц при точности углового позиционирования лазерного пучка доли угловых секунд.
Создаваемое таким образом информационное поле канала наведения позволяет более точное управлять объектом, обеспечивая попадание его в цель.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОПТИЧЕСКИЙ ПРИЦЕЛ СО СЛЕДЯЩИМ ДАЛЬНОМЕРОМ | 2009 |
|
RU2410629C1 |
| СПОСОБ СОПРОВОЖДЕНИЯ ВОЗДУШНОЙ ЦЕЛИ И ОПТИЧЕСКИЙ ПРИЦЕЛ СО СЛЕДЯЩИМ ДАЛЬНОМЕРОМ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2549552C2 |
| СПОСОБ РАСПОЗНАВАНИЯ ЦЕЛИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2478898C1 |
| Система управления огнем боевой машины | 2022 |
|
RU2785804C1 |
| ЛАЗЕРНАЯ СИСТЕМА ТЕЛЕОРИЕНТАЦИИ | 2003 |
|
RU2267734C2 |
| ЛАЗЕРНАЯ СИСТЕМА ТЕЛЕОРИЕНТАЦИИ С КАНАЛОМ ОПТИЧЕСКОЙ ОБРАТНОЙ СВЯЗИ (ВАРИАНТЫ) | 2009 |
|
RU2410722C1 |
| ПАНОРАМНЫЙ ПРИБОР НАБЛЮДЕНИЯ КОМАНДИРА | 2018 |
|
RU2682141C1 |
| ТЕРМОКОМПЕНСИРОВАННАЯ ЛАЗЕРНАЯ СИСТЕМА ТЕЛЕОРИЕНТАЦИИ | 2003 |
|
RU2243626C1 |
| КОМПЛЕКС ВООРУЖЕНИЯ БОЕВОЙ МАШИНЫ | 2007 |
|
RU2351876C1 |
| СПОСОБ АВТОМАТИЗАЦИИ ЦЕЛЕУКАЗАНИЯ ПРИ ПРИЦЕЛИВАНИИ НА ВЕРТОЛЕТНОМ КОМПЛЕКСЕ | 2018 |
|
RU2697939C1 |

Изобретение относится к способам наведения ракет, в частности к оптическим прицельным приспособлениям систем наведения, и может быть использовано в системах управления с телеориентацией в луче лазера. Способ заключается в слежении линии прицеливания за целью, формировании информационного поля канала наведения, при этом линия нулевых сигналов управления которого совмещена с линией прицеливания. С помощью автомата сопровождения цели производят измерение текущих координат, определяющих угловое отклонение цели относительно линии прицеливания. Далее осуществляют разворот линии нулевых сигналов управления информационного поля канала наведения от линии прицеливания, пропорционально измеренному угловому отклонению цели, путем подачи сигналов управления, подаваемых на акустооптический дефлектор передающего модуля канала наведения. Технический результат заключается в повышении точности наведения управляемого объекта на цель. 4 ил.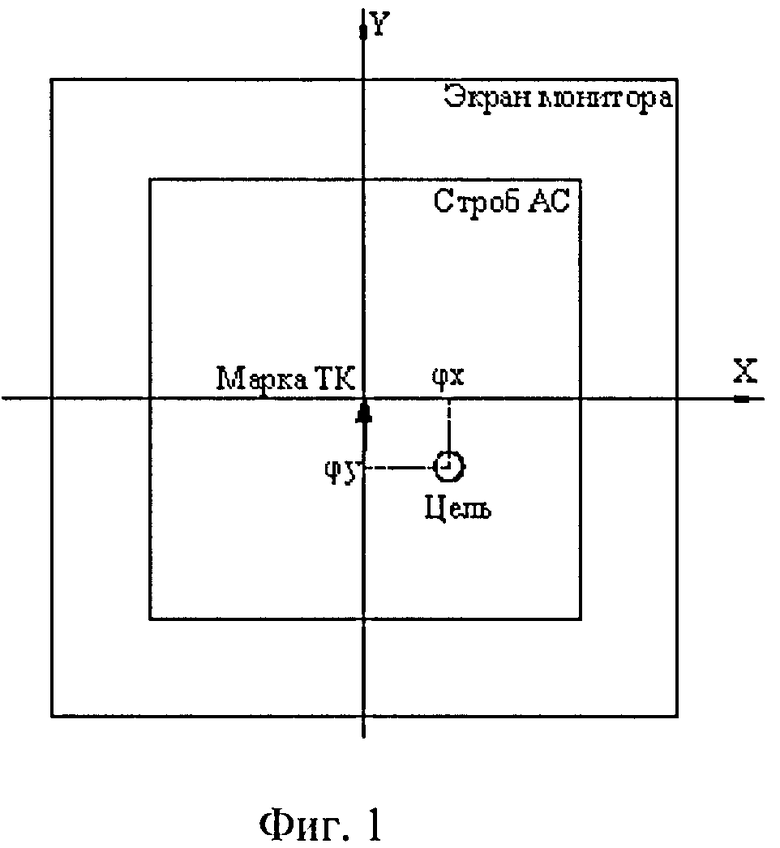
Способ прицеливания и наведения управляемого объекта, заключающийся в слежении линии прицеливания за целью, формировании информационного поля канала наведения, линия нулевых сигналов управления которого совмещена с линией прицеливания, отличающийся тем, что с помощью автомата сопровождения цели производят измерение текущих координат, определяющих угловое отклонение цели относительно линии прицеливания, и осуществляют разворот линии нулевых сигналов управления информационного поля канала наведения от линии прицеливания, пропорционально измеренному угловому отклонению цели, путем подачи сигналов управления, подаваемых на акустооптический дефлектор передающего модуля канала наведения.
| ОПТИЧЕСКИЙ ПРИЦЕЛ СИСТЕМЫ НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 1997 |
|
RU2126946C1 |
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 1997 |
|
RU2126522C1 |
| ОПТИЧЕСКИЙ ПРИЦЕЛ СИСТЕМЫ НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 2001 |
|
RU2212619C2 |
| СПОСОБ НАВЕДЕНИЯ | 1997 |
|
RU2118784C1 |
| ТЕРМОКОМПЕНСИРОВАННАЯ ЛАЗЕРНАЯ СИСТЕМА ТЕЛЕОРИЕНТАЦИИ | 2003 |
|
RU2243626C1 |

