Изобретение относится к лазерной технике, в частности к гироскопии, и может быть использовано для определения угловой скорости лазерного гироскопа, включающего кольцевой лазер, блок электроники, систему качания на неподвижном основании, и систем на основе этого гироскопа путем уменьшения влияния знакопеременной модуляции частот встречных бегущих волн в кольцевом лазере, вызываемой механическими колебаниями кольцевого лазера относительно основания лазерного гироскопа, на точность измерения угловой скорости.
Известен способ определения угловой скорости лазерного гироскопа и систем на его основе с применением оптического вычитания [1]. При использовании данного способа устройство смешения встречных лучей (фотосмеситель) устанавливают не на самом кольцевом лазере, а на неподвижном основании лазерного гироскопа (ЛГ). При соблюдении определенных условий разность частот встречных бегущих волн, вызванная колебаниями кольцевого лазера относительно основания, компенсируется доплеровским сдвигом частоты при отражении от фотосмесителя.
Этот способ обладает следующими недостатками:
- сложность точной юстировки фотосмесителя для полной компенсации модуляции встречных бегущих волн в кольцевом лазере, а также необходимость изготовления оптических деталей с большой точностью;
- наличие дополнительных элементов для поддержания разности фаз сигнала между фотоприемными площадками в 90 градусов.
Наиболее близким по технической сущности к предлагаемому способу является способ определения угловой скорости лазерного гироскопа и систем на его основе путем уменьшения влияния знакопеременной модуляции частот встречных бегущих волн в кольцевом лазере, вызываемой механическими колебаниями кольцевого лазера относительно основания лазерного гироскопа, использующий измерение угловой скорости синхронно с его колебаниями [2]. При применении данного способа измерение происходит за время, кратное периоду качания гироскопа, поэтому в случае постоянной амплитуды колебаний гироскопа ошибка определения угловой скорости равна нулю.
Этот способ обладает следующими недостатками:
- измерение угловой скорости может производиться только за время, кратное периоду качания гироскопа;
- невозможно уменьшить дискретность измерения угловой скорости без дополнительной математической обработки.
Задачей настоящего изобретения является определение угловой скорости лазерного гироскопа и систем на его основе.
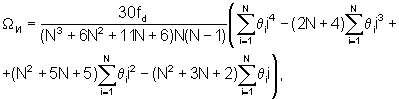
Поставленная задача решается за счет того, что в известном способе измерения угловой скорости лазерного гироскопа и систем на его основе производят измерения значений приращений угла поворота θi за время опроса 1/fd, где fd - частота дискретизации или количество измерений в секунду, и определяют угловую скорость вращения лазерного гироскопа и систем на его основе по следующей формуле:

где θi - значение приращения угла поворота,
i - номер измерения θi,
N - число измерений θi.
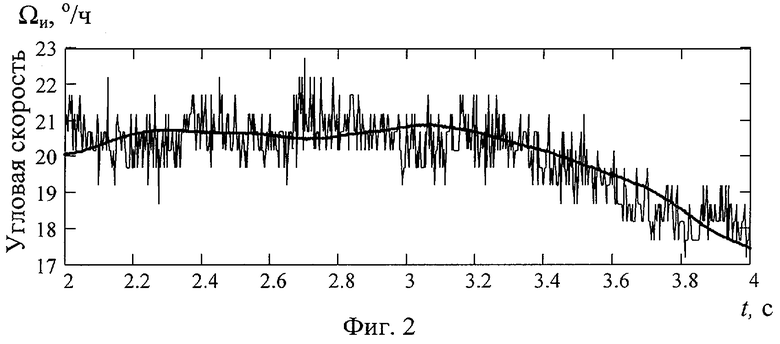
На фиг.1 изображен типичный сигнал гироскопа со случайным изменением амплитуды (ошумлением), по оси абсцисс отложено время, а по оси ординат - приращение угла поворота лазерного гироскопа. На фиг.2 изображены измеренные значения угловой скорости для прототипа (тонкая линия) и предложенного способа (жирная линия), по оси абсцисс отложено время, а по оси ординат - угловая скорость поворота лазерного гироскопа.
Сигнал на выходе ЛГ представляет собой приращение угла θi за определенный промежуток времени, определяемый частотой дискретизации fd (количество измерений за секунду).
Как видно из фиг.1, полезный сигнал представляет собой постоянную составляющую Ω/fd с наложенным на нее колебанием подставки и приближенно описывается следующей формулой:

где Ω - угловая скорость вращения гироскопа, Ωn - максимальная угловая скорость (так называемая амплитуда подставки), fk - частота качания гироскопа, ϕ - начальная фаза подставки, i - номер измерения, ti - время i-го измерения.
При непосредственном измерении угловой скорости по приращению угла поворота ошибка измерения может достигать значения Ωn, которая существенно уменьшается при использовании предложенного метода.
Предлагаемый способ был применен для определения угловой скорости лазерного гироскопа марки КМ-11.
Испытания методики вычитания проводились на лазерном гироскопе марки КМ-11 при средней частоте подставки 24 кГц и частоте качания 148 Гц. Угловая скорость определялась по предложенной формуле с помощью микроконтроллера с частотой дискретизации 4 кГц за одну секунду.
За каждую секунду микроконтроллер измерял массив из 4 тыс. точек приращений угла поворота, после чего производил вычисление угловой скорости по предложенной формуле.
Результаты измерений при вычитании за 1 секунду для предложенного способа и прототипа приведены на фиг.2.
Из фиг.2 видно, что с помощью предложенного способа вычитания удалось более чем в 10 раз увеличить точность измерения угловой скорости по сравнению с прототипом.
Испытания данного способа показали, что, по сравнению с известным, он обладает следующими преимуществами:
- позволяет проводить измерение за любое время, кратное частоте дискретизации;
- значительно уменьшает дискретность измерения угловой скорости.
Литература
1. Великобритания, патент №2107511, Н01S 3/083.
2. Design and implementation of an FPGA-based ring laser gyro signal processing, J. Instrum. Soc. India 35 (2), 213-221 - прототип.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПРЕЦИЗИОННОЙ ОБРАБОТКИ СИГНАЛОВ ЛАЗЕРНОГО ГИРОСКОПА | 2014 |
|
RU2571437C1 |
| Способ стабилизации и регулирования периметра четырехчастотного зеемановского лазерного гироскопа со знакопеременной магнитооптической частотной подставкой в форме меандра | 2023 |
|
RU2805770C1 |
| СПОСОБ ИСКЛЮЧЕНИЯ ЗОНЫ ЗАХВАТА В ЛАЗЕРНОМ ГИРОСКОПЕ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ (ЛАЗЕРНЫЙ ГИРОСКОП) | 2008 |
|
RU2397446C2 |
| Способ компенсации влияния медленного меандра на показания лазерного гироскопа | 2018 |
|
RU2685795C1 |
| Кольцевой оптический квантовый генератор | 1968 |
|
SU1841275A1 |
| Лазерный гироскоп | 1990 |
|
SU1820214A1 |
| Способ измерения угловой скорости лазерного гироскопа со знакопеременной частотной подставкой | 2017 |
|
RU2651612C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ ПЕРЕМЕЩЕНИЙ ЛАЗЕРНЫМ ГИРОСКОПОМ | 2010 |
|
RU2418266C1 |
| ИНЕРЦИАЛЬНОЕ ИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО С ЦИФРОВЫМ СРЕДСТВОМ УПРАВЛЕНИЯ | 2019 |
|
RU2731656C1 |
| Способ измерения угловых перемещений зеемановским лазерным гироскопом | 2018 |
|
RU2688952C1 |
Изобретение относится к лазерным гироскопам, включающим кольцевой лазер, блок электроники и систему качания на неподвижном основании, и может быть использовано для измерения его угловой скорости. Способ включает измерение значений приращений угла поворота θ за время опроса l/fd и определение угловой скорости вращения гироскопа и систем на его основе по следующей формуле:
где θi - значение приращения угла поворота, i - номер измерения θi, N - число измерений θi, fd - количество измерений в секунду. Изобретение позволяет существенно уменьшить ошибку, вызываемую механическими колебаниями гироскопа относительно неподвижного основания, и уменьшить дискретность измерения угловой скорости без использования дополнительных оптических элементов в его конструкции. 2 ил.
Способ определения угловой скорости лазерного гироскопа и систем на его основе, позволяющий уменьшить влияние знакопеременной модуляции частот встречных бегущих волн в лазерном гироскопе на угловую скорость, отличающийся тем, что производят измерения значений приращений угла поворота θi за время опроса l/fd, где fd - частота дискретизации или количество измерений в секунду, и определяют угловую скорость вращения лазерного гироскопа и систем на его основе по следующей формуле:
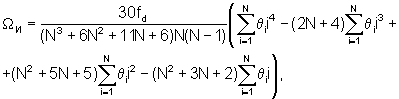
где θi - значение приращения угла поворота;
i - номер измерения θi;
N - число измерений θi.
| BANERGJEE K | |||
| et al | |||
| Design and Implementation of an FPGA-Based Ring Laser Gyro Signal Processing, J | |||
| Instrum | |||
| Soc | |||
| India, v.35 (2), 2005, p.213-221 | |||
| Способ определения угловой скорости | 1989 |
|
SU1760455A1 |
| Лазерный волоконный гироскоп | 1981 |
|
SU972923A1 |
| СТАБИЛИЗИРОВАННАЯ ФАРМАЦЕВТИЧЕСКАЯ КОМПОЗИЦИЯ НА ОСНОВЕ РЕКОМБИНАНТНОГО НЕГЛИКОЗИЛИРОВАННОГО ИНТЕРЛЕЙКИНА ЧЕЛОВЕКА В ВОССТАНОВЛЕННОМ ВИДЕ IL-2 И СПОСОБ ЕЕ ПОЛУЧЕНИЯ | 1992 |
|
RU2107511C1 |
| JP 2004150826 А, 27.05.2004 | |||
| КЛАПАН ЗАПОРНО-РЕГУЛИРУЮЩИЙ | 2005 |
|
RU2301932C1 |
| US 5450197 А, 12.09.1995. | |||

