Изобретение относится к рыбной промышленности, а более конкретно к области технологического оборудования для обезглавливания рыбы, и может найти применение на береговых рыбообрабатывающих предприятиях и судах промыслового флота.
Обезглавливание рыбы является самостоятельной технологической операцией разделывания. Общим требованием для всех видов обезглавливания является уменьшение отходов мяса.
При обезглавливании рыбы предусматриваются три следующих вида реза: прямой, клиновидный и фигурный. Вид реза определяется видом и формой тела рыбы, видом вырабатываемого продукта. При прямом резе плоскость резания перпендикулярна или наклонена под определенным углом к оси тела рыбы. При клиновидном резе имеются две плоскости резания, расположенные под углом друг к другу и к оси тела рыбы. При фигурном (U-образном) резе плоскость резания повторяет очертания жаберной крышки. Фигурный рез является наиболее экономичным, так как на обезглавленной тушке остаются участки мяса, грудные плавники с костями оснований, а в некоторых случаях - брюшные плавники и плечевые кости.
Основной проблемой реализации технологической операции обезглавливания рыбы является точная настройка рабочего органа на экономичный рез головы. С целью максимальной экономии ценного рыбного сырья форма рабочего органа должна соответствовать очертаниям жаберной крышки. Форма жаберной щели может быть приближенно описана дугой окружности. Вместе с тем обрабатываемая рыба различных размерных диапазонов отличается морфометрическими параметрами и формой жаберной крышки. Таким образом, форма рабочего органа должна изменяться при обработке различных партий рыбы вследствие различной формы жаберных крышек.
Известно устройство для обезглавливания рыбы (RU №1126199, МПК A22C 25/14, опубл. 23.11.1984), состоящее из транспортирующего органа с поперечно размещенными лотками для перемещения рыбы на боку, пары приводных дисковых ножей, симметрично установленных под углом один относительно другого, подвижного ощупывающего механизма, соединенного с дисковыми ножами. Для обеспечения точной ориентации положения дисковых ножей относительно плоскости симметрии рыбы дисковые ножи закреплены с возможностью поворота, а ощупывающий механизм содержит подпружиненные планки, которые связаны с ножами посредством осей.
К недостатку устройства следует отнести значительные потери сырья при выполнении клиновидного реза головы. Конструкция дисковых ножей допускает резание по прямой линии, в то время как жаберная щель рыбы имеет криволинейную форму. При этом в отходы поступает ценное мясо приголовка рыбы. Также недостатком устройства является применение контактного измерительного органа. Это существенно снижает точность настройки режущих инструментов вследствие различной консистенции сырья, так как механический щуп неизбежно продавливает ткань рыбы. Механизм настройки имеет сложную кинематику, что приводит к низкой производительности устройства. Указанные обстоятельства существенно ухудшают эксплуатационные характеристики устройства и не позволяют обеспечить экономичное отрезание головы рыбы.
Известно устройство для отрезания голов у крупных рыб (RU №2076606, МПК6 A22C 25/14, опубл. 10.04.1997), включающее горизонтальный стол с прорезью, гильотинный нож, установленный в вертикальных направляющих с возможностью перемещения вдоль них. Гильотинный нож имеет режущую грань, изогнутую под углом 90-120°. Стол оснащен роликами для подачи рыбы и захватом с держателями рыбы.
Основными недостатками данного устройства являются отсутствие транспортирующего органа и обмеряющего приспособления, а также выполнение обезглавливания рыбы клиновидным резом. Для работы устройства необходимо присутствие оператора, который вручную подводит тушку рыбы под режущий инструмент. В связи с чем имеется опасность травмирования рук оператора. Поскольку оператор вынужден вручную укладывать рыбу на линию резания и приводить в действие пневмоцилиндр, производительность устройства является низкой и определяется физическими возможностями человека. В устройстве отсутствует приспособление для автоматического измерения параметров сырья, в связи с чем невозможна настройка гильотинного ножа. Клиновидный рез головы рыбы приводит к значительным потерям мяса приголовка и невысокому выходу готовой продукции. Вследствие вышеизложенных обстоятельств устройство имеет низкие эксплуатационные показатели по производительности, ресурсосбережению и технике безопасности.
Известно устройство для обезглавливания рыбы (CN 202445051, МПК A22C 25/14, опубл. 26.09.2012), включающее транспортирующий орган, выполненный в виде двухленточного конвейера, дисковый нож и два электродвигателя. Первый электродвигатель соединен с дисковым ножом, второй - с приводным валом конвейера. Рыба укладывается оператором в желоба ленты конвейера и перемещается в них к дисковому ножу.
Недостатками устройства являются выполнение прямого реза головы рыбы, отсутствие обмеряющего приспособления и приспособления для настройки рабочего органа. Положение дискового ножа относительно плоскости движения рыбы не регулируется. Прямой рез головы приводит к существенным потерям мяса на приголовке рыбы, в связи с чем выход продукции является низким. Вследствие этого существенно ограничена экономичность устройства, поскольку значительное количество ценного мяса поступает в отходы, а также требуются существенные затраты ручного труда для предварительного выставления рыбы на линию резания.
Наиболее близким техническим решением является устройство для отрезания головы рыбы (RU №599785, МКИ2 A22C 25/14, опубл. 30.03.1978), включающее подающий конвейер, содержащий поперечно расположенные лотки, приспособление для перемещения рыбы, выполненное в виде упорной планки, соединенной с шаговым электроприводом, режущий орган, выполненный в виде пары дисковых ножей, обмеряющее приспособление, выполненное в виде пары механических датчиков для измерения толщины тушки, систему управления, связанную с режущим органом и выполненную в виде вычислительного блока, преобразователя, коммутатора. Приспособление осуществляет обезглавливание рыбы прямым резом с автоматической настройкой положения тушки относительно линии резания.
Недостатками устройства являются использование косвенного метода для измерения длины головы рыбы, применение механических контактных щупов для измерения толщины рыбы, а также выполнение обезглавливания прямым резом. Длина головы рыбы косвенно рассчитывается по измеренной толщине рыбы, что приводит к систематической погрешности, поскольку зависимость между указанными морфометрическими параметрами имеет статистический характер. Механический щуп продавливает ткань рыбы, вследствие чего в процесс измерения вносятся дополнительные погрешности. Выполнение прямого реза головы дисковыми ножами приводит к значительным потерям ценного мяса на приголовке. Таким образом, устройство не обеспечивает ресурсосберегающее обезглавливание рыбы.
Изобретение решает задачу повышения автоматизации операции обезглавливания рыбы и экономии мяса рыбы при осуществлении этой операции за счет использования видеоизображения тушки рыбы для точного измерения длины головы и очертания жаберной крышки рыбы, оснащения устройства набором режущих органов и автоматического выбора наиболее оптимального размера режущего органа и его установку в рабочую позицию, выбора в качестве режущих органов фигурных гильотинных ножей, а также более точного выставления тушки рыбы на линию резания.
Для достижения необходимого технического результата устройство, включающее подающий конвейер, содержащий поперечно расположенные лотки, приспособление для перемещения рыбы, выполненное в виде упорной планки, снабженной приводом, режущий орган, обмеряющее приспособление, систему управления, снабжено набором режущих органов, которые подпружинены и закреплены в пазах ротора. Ротор установлен над подающим конвейером с возможностью поворота и снабжен для этого шаговым двигателем, который связан с системой управления. Режущие органы выполнены в виде фигурных гильотинных ножей, различающихся размерами, а их профили соответствуют очертаниям жаберных крышек рыб. Кроме того, ротор снабжен связанным с пневматическим распределителем и системой управления пневматическим цилиндром, шток которого использован в качестве толкателя при опускании выбранного подпружиненного фигурного гильотинного ножа для отрезания головы рыбы. В качестве обмеряющего приспособления использована видеокамера, установленная перед ротором с ножами, связанная с системой управления и снабженная источником света. Подающий конвейер дополнительно снабжен связанными с системой управления двумя парами оптических датчиков и отражателей, расположенных оппозитно по обе стороны конвейера, причем первая пара расположена под видеокамерой, а вторая - перед упорной планкой.
Наличие ротора, в пазах которого закреплены сменные фигурные гильотинные ножи различного профиля, соответствующего очертаниям жаберной крышки рыбы, позволяет выполнять экономичный рез головы рыбы практически без потерь ценного мяса приголовка. На основе исследований морфометрических параметров промысловых видов рыб профиль фигурных гильотинных ножей выбирается таким образом, чтобы он соответствовал очертанию жаберной крышки рыбы. Автоматический выбор соответствующего фигурного гильотинного ножа для ввода его в действие осуществляется путем вращения ротора шаговым двигателем по команде системы управления.
Рыба основных промысловых видов характеризуется тем, что жаберная щель выделяется значительно меньшей интенсивностью излучения отраженного света на фоне приголовной части. Этот признак позволяет определить очертания жаберной крышки и границу головы для расчета координат цилиндрической поверхности экономичного реза.
Формально получение видеоизображения заключается в определении функциональной зависимости интенсивности излучения от координат точек изображения:

Видеоизображение приголовной части тела рыбы представляется в цифровой форме путем дискретизации значений интенсивности излучения (яркости) в каждой точке фотоизображения. Дискретизация ведется в пространстве по геометрическим координатам и по значению интенсивности излучения. Результатом дискретизации по полю изображения является дискретное изображение - функция g (m, n), значения которой совпадают со значениями f (x, y) в точках:

где m=0, 1, 2, …, M-1; n=0, 1, 2, …, N-1.
В связи с тем, что на этапе формирования видеоизображения приголовной части вносятся аппаратные шумы, применяется пороговая фильтрация шумов. При этом последовательно анализируется цифровое представление яркости всех элементов изображения f (x, y), и если яркость элемента анализируемой группы из N×N элементов превышает среднюю яркость группы
на заданное пороговое значение, то его яркость заменяется на среднюю яркость группы G. Обычно N принимается равным 3 или 5.
Выделение контуров головы и жаберной крышки основано на дифференциальном алгоритме. Контур жаберной щели и контур головы рыбы соответствуют максимумам нормы градиента функции изображения f (x, y). Поиск градиента связан с определением производных функции f (x, y). Границы могут быть определены численным методом поиска максимума функции при помощи оператора Робертса.
В результате выполнения процедуры выделения контуров в соответствии с выражениями (1)-(3) определяются значения совокупности параметров приголовной части рыбы, представленных в таблице 1.

Для получения контрастного изображения и уверенного распознавания морфометрических параметров рыбы требуется освещение поля зрения видеокамеры. В качестве источника света применяется светодиодная лампа на основе полупроводниковых светодиодов белого свечения. Это позволяет исключить из осветительной системы конденсор за счет достаточного потока излучения, направляемого в рабочую зону видеокамеры. Выбор приборов указанного типа для эффективного освещения рабочей зоны обусловлен следующими причинами:
- полезный световой поток по отношению к общему световому потоку существенно выше, чем у люминесцентных и газоразрядных ламп. В связи с этим возможно снижение общего светового потока по сравнению с люминесцентными или газоразрядными лампами при той же освещенности рабочей зоны;
- низкий уровень излучения в ультрафиолетовом диапазоне;
- широкая номенклатура сверхъярких светодиодов белого свечения с цветовой температурой 3000 K - 10000 K. Вследствие этого имеется выбор до 8 градаций оттенков белого цвета;
- возможность подбора вторичной оптики с оптимальными светотехническими характеристиками вследствие компактности светодиодов;
- значительный срок службы и высокая виброустойчивость;
- высокая электробезопасность, обусловленная тем, что питание светодиодов осуществляется от низковольтных источников постоянного напряжения через микросхемы коммутаторов, имеющих встроенную защиту от короткого замыкания;
- высокая устойчивость к холоду и влаге;
- стабильность параметров в процессе работы;
- возможность управления параметрами в процессе работы;
- возможность осуществления модуляции в схеме включения источника.
Наличие оптических датчиков и отражателей позволяет получать информацию о текущем положении тушки рыбы на подающем конвейере. В основу работы оптического датчика положен принцип перекрытия светового луча тушкой рыбы. Излучение датчика формируется его передающей частью и проецируется на уголковый отражатель. В результате отражения луч света попадает в фотоприемную часть оптического датчика. При прохождении тушки между оптическим датчиком и уголковым отражателем луч света перекрывается рыбой, в результате чего формируется соответствующий сигнал наличия тушки рыбы для системы управления.
Наличие системы управления, выполненной, например, в виде микроЭВМ, позволяет рассчитать длину головы рыбы и очертания жаберной крышки по видеоизображению тушки, а также сформировать управляющие воздействия для упорной планки, пневматического распределителя и шагового двигателя. Программа ЭВМ позволяет на основании полученной видеоинформации о голове рыбы осуществлять в процессе обработки каждой тушки автоматическое совмещение жаберной щели и линии резания фигурного гильотинного ножа, а также управлять положением режущих инструментов, подбирая тем самым оптимальную форму резания.
Как показывают промышленные исследования устройства, для выполнения экономичного реза в качестве режущего инструмента наиболее подходит фигурный нож гильотинного типа. Для резания продуктов с мягкой консистенцией наиболее подходящим является пневматический привод режущего инструмента, выполненный в виде пневматического цилиндра. Пневматический привод характеризуется большим быстродействием, высокими показателями по мощности, усилию и массе. Пневматический привод может работать во влажной, запыленной и загрязненной средах, длительное время выдерживает перегрузки. Перемещение сжатого воздуха в полости двигателя и элементах пневматического привода позволяет отводить избыточную теплоту, что обеспечивает работу привода в условиях повышенной температуры.
Режим работы привода ротора с набором фигурных гильотинных ножей характеризуется как режим поворота или порционирования исполнительного вала. Таким образом, цель состоит в обеспечении строгой пропорциональности между суммарным углом поворота и числом поданных импульсов, то есть в исключении накапливаемой ошибки. При этом закон движения во времени и фазовая траектория движения произвольны. Внутри интервала движения не устанавливается определенного соответствия между мгновенным положением исполнительного вала и номером или моментом подачи каждого управляющего импульса. Динамическая ошибка лимитируется только условиями сохранения устойчивости движения. Подобным требованиям отвечает разомкнутый электропривод на основе шагового двигателя.
Разомкнутый шаговый электропривод обеспечивает устойчивое движение и сохранение полученной информации. Статическая и динамическая ошибки такого привода ограничены максимальными значениями, обусловленными ценою шага и числом тактов коммутации двигателя, и не превышают их во всем диапазоне нормальной работы.
Разомкнутый шаговый электропривод непосредственно реагирует на импульсные команды, причем информационная характеристика сигнала определяется только частотой и числом импульсных посылок. Изменения в определенных пределах амплитуды и формы импульса не нарушают нормальной работы. Скорость вращения и суммарный угол поворота вала двигателя пропорциональны соответственно частоте и числу поданных импульсов. При отсутствии сигнала коммутация фаз прекращается, поле в рабочем зазоре двигателя останавливается, а шаговый двигатель развивает значительный статический момент (синхронизирующий момент). Это позволяет приводу фиксировать конечные координаты любых перемещений. Таким образом, дискретный разомкнутый привод с шаговым двигателем является синхронно-импульсным следящим приводом, сочетающим в себе возможности глубокого частотного регулирования скорости с возможностями числового задания пути и надежной фиксации конечных координат.
Преимущества разомкнутого шагового электропривода следующие:
- повышение надежности устройства, обусловленное уменьшением количества элементов системы, поскольку отсутствуют датчик обратной связи, усилитель датчика, электронные узлы индикатирования рассогласования, тахогенератор;
- удешевление устройства, обусловленное уменьшением количества элементов;
- упрощение синтеза систем автоматического управления, характеризующееся уменьшением количества связей между узлами;
- увеличение точности дискретного перемещения, обусловленное фиксацией ротора шагового двигателя при его остановке.
На фиг. 1 представлена схема предлагаемого устройства для обезглавливания рыбы, вид со стороны пневматического цилиндра;
На фиг. 2 - то же, вид со стороны шагового двигателя;
На фиг. 3 представлен предлагаемый набор режущих органов для установки в пазах ротора.
На чертежах приняты следующие обозначения:
1 - ротор;
2 - фигурный гильотинный нож;
3 - возвратная пружина;
4 - подающий конвейер;
5 - поперечно расположенный лоток;
6 - шаговый двигатель;
7 - пневматический цилиндр;
8 - пневматический распределитель;
9 - упорная планка;
10 - привод упорной планки;
11 - привод подающего конвейера;
12, 13 - оптический датчик;
14, 15 - отражатель;
16 - видеокамера;
17 - источник света;
18 - направляющая;
19 - лоток отвода голов рыбы;
20 - система управления;
21 - кронштейн;
22, 23 - луч света;
24 - опорная стойка;
25 - шток пневматического цилиндра.
В предлагаемом техническом решении экономия мяса рыбы достигается за счет выполнения фигурного реза головы рыбы гильотинным ножом, профиль которого в наибольшей мере соответствует очертанию жаберной крышки. Резание выполняется по жаберной щели рыбы. Система управления обеспечивает автоматическое совмещение жаберной щели рыбы с линией резания фигурного гильотинного ножа. Точное измерение длины головы и очертаний жаберной крышки рыбы выполняется путем получения видеоизображения тушки рыбы, находящейся в лотках подающего конвейера, а также распознавания образа рыбы в системе управления. На основе полученных данных о координатах жаберной щели рыбы по команде системы управления тушка рыбы автоматически выставляется упорной планкой на линию резания. Кроме того, автоматический выбор и ввод в действие режущего органа из набора фигурных гильотинных ножей осуществляется путем вращения ротора шаговым двигателем по команде системы управления. При вращении ротора требуемый фигурный гильотинный нож, профиль которого в наибольшей мере соответствует очертаниям жаберной крышки обрабатываемой рыбы, одновременно устанавливается над головой рыбы и подводится под шток пневматического цилиндра для приведения в действие. Наличие пневматического цилиндра позволяет обеспечить необходимые усилия резания для выполнения экономичного обезглавливания рыбы. Пневматический распределитель позволяет обеспечить работу пневматического цилиндра по командам системы управления. Наличие оптических датчиков с отражателями позволяет контролировать положение тушки рыбы на подающем конвейере и формировать команды системой управления.
Предлагаемое устройство для обезглавливания рыбы содержит ротор 1. В пазах ротора 1 закреплены фигурные гильотинные ножи 2. Профили фигурных гильотинных ножей 2 в наборе соответствуют очертаниям жаберной крышки рыб и отличаются размерами. На штоках фигурных гильотинных ножей 2 закреплены возвратные пружины 3. Ротор 1 установлен с возможностью поворота над подающим конвейером 4 по сигналу от системы управления 20 для выставления в рабочую позицию фигурного гильотинного ножа 2 наиболее оптимального размера для очередной тушки рыбы. На подающем конвейере 4 закреплены поперечно расположенные лотки 5, шаговый двигатель 6, пневматический цилиндр 7, пневматический распределитель 8, упорная планка 9, привод упорной планки 10, привод подающего конвейера 11, оптические датчики 12 и 13, отражатели 14 и 15, видеокамера 16, источник света 17, направляющая 18, лоток 19 для отвода голов рыбы, система управления 20. Привод подающего конвейера 11 соединен с системой управления 20. Шаговый двигатель 6 соединен с верхней частью ротора 1 и системой управления 20. Пневматический цилиндр 7 соединен с пневматическим распределителем 8. Пневматический распределитель 8 соединен с системой управления 20. Шток 25 пневматического цилиндра 7 в рабочей позиции расположен над выбранным системой управления 20 фигурным гильотинным ножом 2, который находится над очередной тушкой рыбы. Конструкция пневматического цилиндра предусматривает самовозврат штока 25 в исходное положение при выходе сжатого воздуха из рабочей полости. Привод упорной планки 10 соединен с упорной планкой 9 и системой управления 20. Видеокамера 16 связана с системой управления 20. Оптические датчики 12 и 13 связаны с системой управления 20. Видеокамера 16 и источник света 17 установлены на кронштейне 21 над поперечно расположенными лотками 5 таким образом, чтобы тушка рыбы была освещена и находилась в поле зрения видеокамеры 16. Оптические датчики 12, 13 и отражатели 14, 15 расположены оппозитно по сторонам подающего конвейера 4 таким образом, что лучи света 22, 23 перекрываются тушкой рыбы при ее перемещении в поперечно расположенном лотке 5. Подающий конвейер 4 установлен на опорной стойке 24. В пневматический распределитель 8 осуществляется подача сжатого воздуха из магистрали под давлением 8 атм.
Работа устройства для обезглавливания рыбы осуществляется следующим образом.
Рыбу в положении на боку укладывают головой в сторону направляющей 18 в поперечно расположенные лотки 5 подающего конвейера 4. Система управления 20 подает команду запуска на привод подающего конвейера 11, после чего подающий конвейер 4 приводится в движение и, двигаясь с постоянной скоростью, перемещает тушку рыбы в поперечно расположенном лотке 5 в поле зрения видеокамеры 16. Тушка по мере движения упирается рылом в направляющую 18 и выравнивается. Источник света 17 освещает поле зрения видеокамеры 16 и создает необходимые условия для получения качественного видеоизображения. Тушка рыбы перемещается между оптическим датчиком 12 и отражателем 13, пересекая луч света 22. При пересечении луча света 22 оптический датчик 12 формирует сигнал наличия тушки для системы управления 20. Система управления 20 при получении сигнала от оптического датчика 12 дает команду видеокамере 16, которая формирует видеоизображение тушки рыбы и передает его в систему управления 20. Система управления 20 обрабатывает полученное видеоизображение, рассчитывая длину головы рыбы и координаты жаберной щели. Далее тушка рыбы проходит между оптическим датчиком 14 и отражателем 15, пересекая луч света 23. При пересечении луча света 23 оптический датчик 14 формирует сигнал наличия тушки для системы управления 20. Система управления 20 при получении сигнала от оптического датчика 14 дает команду приводу упорной планки 10, который перемещает упорную планку 9 в сторону тушки рыбы. Упорная планка 9 упирается в рыло рыбы и выставляет тушку на линию резания. После выставления тушки рыбы привод упорной планки 10 возвращает упорную планку 9 в исходное положение. Одновременно система управления 20 подает команду на шаговый двигатель 6, который вращает ротор 1 с набором фигурных гильотинных ножей 2. За счет вращения ротора 1 шаговым двигателем 6 под шток 25 пневматического цилиндра 7 подводится фигурный гильотинный нож 2, размерный профиль которого в наибольшей мере соответствует очертанию тушки рыбы. После выставления фигурного гильотинного ножа 2 в рабочую позицию - над линией резания, система управления 20 подает команду на пневматический распределитель 8, который подает сжатый воздух в рабочую полость пневматического цилиндра 7. Шток 25 пневматического цилиндра 7 под давлением сжатого воздуха опускается вниз, входит в соприкосновение с фигурным гильотинным ножом 2 и перемещает его вниз. Фигурный гильотинный нож 2 в момент прохождения под ним тушки рыбы опускается вниз и отрезает голову по жаберной щели. Отрезанная голова падает в лоток 19 отвода голов рыбы, а обезглавленная тушка перемещается далее в поперечно расположенном лотке 5 подающего конвейера 4. После отрезания головы рыбы система управления 20 подает команду на пневматический распределитель 8, в результате чего он прекращает подачу сжатого воздуха в рабочую полость пневматического цилиндра 7, а рабочая полость пневматического цилиндра 7 сообщается с атмосферой. Сжатый воздух выходит из рабочей полости пневматического цилиндра 7 в атмосферу, в результате чего шток 25 пневматического цилиндра 7 поднимается вверх. Возвратная пружина 3 поднимает фигурный гильотинный нож 2 вверх в исходное положение. Далее цикл повторяется для следующей тушки рыбы. В случае если тушка рыбы уложена в поперечно расположенный лоток 5 неправильно, после получения видеоизображения тушки рыбы видеокамерой 16 и распознавания образа рыбы система управления 20 формирует звуковой сигнал для оператора, а команды на привод упорной планки 9, шаговый двигатель 6 и пневматический распределитель 7 системой управления не выдаются. Вследствие этого тушка рыбы, уложенная неправильно в поперечно расположенный лоток 5, не обрабатывается. При длительном отсутствии тушек рыбы на подающем конвейере 4 система управления 20 подает на привод подающего конвейера 11 команду для останова подающего конвейера 4.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОБЕЗГЛАВЛИВАНИЯ РЫБЫ | 2006 |
|
RU2320177C1 |
| УСТРОЙСТВО ДЛЯ ОБЕЗГЛАВЛИВАНИЯ РЫБЫ | 2012 |
|
RU2487545C1 |
| Устройство для отрезания головы рыбы | 1975 |
|
SU599785A1 |
| Устройство для разделки рыбы набАлыК | 1979 |
|
SU820778A1 |
| Устройство для разделки рыбы на балык | 1975 |
|
SU556770A2 |
| Устройство для обезглавливания рыбы | 1975 |
|
SU659124A1 |
| Устройство для разделки голов рыб | 1980 |
|
SU929038A1 |
| Рыборазделочная машина | 1973 |
|
SU506368A1 |
| УСТРОЙСТВО ДЛЯ ФИЛЕТИРОВАНИЯ РЫБЫ | 2006 |
|
RU2320178C1 |
| УСТРОЙСТВО ДЛЯ ОТРЕЗАНИЯ ГОЛОВЫ РЫБЫ, "ГОЛОВОРЕЗ" | 2002 |
|
RU2225121C1 |


Устройство включает набор режущих органов, которые подпружинены и закреплены в пазах ротора, установленного над подающим конвейером с возможностью поворота и снабженного для этого шаговым двигателем, связанным с системой управления. Режущие органы выполнены в виде фигурных гильотинных ножей, различающихся размерами, а их профили соответствуют очертаниям жаберных крышек рыб. Ротор снабжен связанным с пневматическим распределителем и системой управления пневматическим цилиндром, шток которого использован в качестве толкателя при опускании выбранного подпружиненного фигурного гильотинного ножа для отрезания головы рыбы. В качестве обмеряющего приспособления использована видеокамера, установленная перед ротором с ножами, связанная с системой управления и снабженная источником света. Подающий конвейер дополнительно снабжен двумя парами оптических датчиков и отражателей, расположенных оппозитно по обе стороны конвейера, причем датчики связаны с системой управления. Изобретение обеспечивает автоматизацию процесса. 3 ил., 1 табл.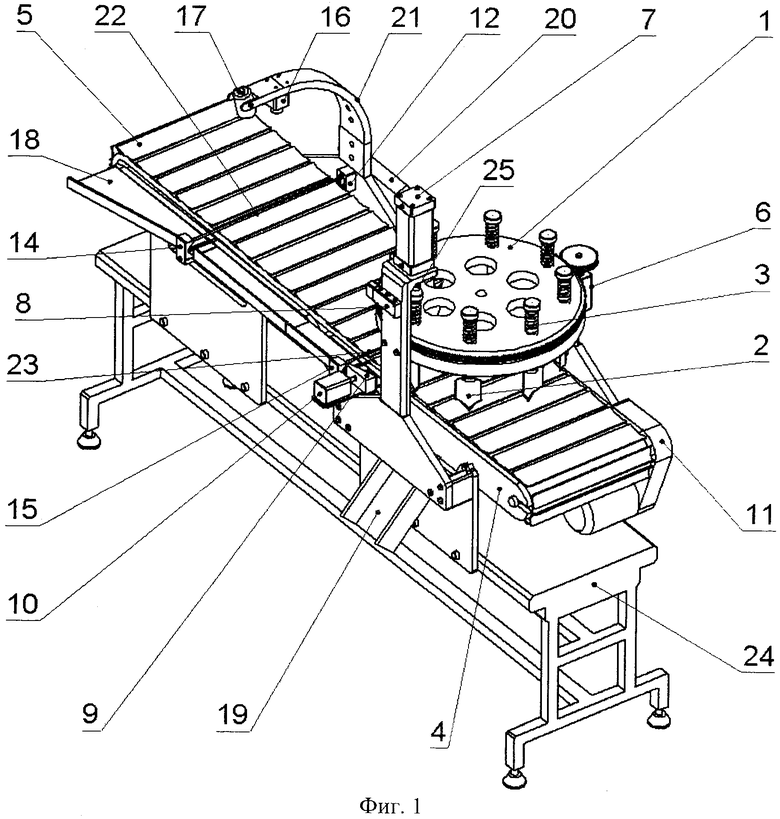
Устройство для обезглавливания рыбы, включающее подающий конвейер, содержащий поперечно расположенные лотки, приспособление для перемещения рыбы, выполненное в виде упорной планки, снабженной приводом, режущий орган, обмеряющее приспособление, систему управления, отличающееся тем, что устройство снабжено набором режущих органов, которые подпружинены и закреплены в пазах ротора, установленного над конвейером с возможностью поворота и снабженного для этого шаговым двигателем, связанным с системой управления, режущие органы выполнены в виде фигурных гильотинных ножей, различающихся размерами, а их профили соответствуют очертаниям жаберных крышек рыб, кроме того, ротор снабжен связанным с пневматическим распределителем и системой управления пневматическим цилиндром, шток которого использован в качестве толкателя при опускании выбранного подпружиненного фигурного гильотинного ножа для отрезания головы рыбы, в качестве обмеряющего приспособления использована видеокамера, установленная перед ротором с ножами, связанная с системой управления и снабженная источником света, подающий конвейер дополнительно снабжен связанными с системой управления двумя парами оптических датчиков и отражателей, расположенных оппозитно по обе стороны конвейера, причем первая пара расположена под видеокамерой, а вторая - перед упорной планкой.
| Устройство для отрезания головы рыбы | 1975 |
|
SU599785A1 |
| УСТРОЙСТВО ДЛЯ ОБЕЗГЛАВЛИВАНИЯ РЫБЫ | 2006 |
|
RU2320177C1 |
| УСТРОЙСТВО К КАРТОФЕЛЕСОРТИРОВКАМ ДЛЯ ОТБОРА ПОВРЕЖДЕННЫХ КЛУБНЕЙ | 1940 |
|
SU60312A1 |

