Изобретение относится к области проведения работ по подъему затонувших объектов, например атомных подводных лодок.
Известен способ подъема затонувшего объекта (прототип), включающий в себя опускание с находящегося над затонувшим объектом базового судна посредством подъемного механизма секционной последовательно наращиваемой штанги нулевой плавучести, снабженной траверсой с грузозахватным приспособлением, с фиксацией штанги на базовом судне при монтаже очередной секции, соединение секционной штанги с затонувшим объектом посредством захвата, посекционный подъем штанги с фиксацией ее на базовом судне при демонтаже очередной верхней секции и фиксацию поднятого на поверхность водоема затонувшего объекта на базовом судне (SU №885101. Кл. В63С 7/02, 1977 г.).
Однако известный способ характеризуется значительными нагрузками на подъемный механизм, что ограничивает возможности его использования подъемом затонувших объектов относительно небольшого веса, значительной продолжительностью цикла операции подъема, что вызвано малой рабочей скоростью подъема, связанной с необходимостью проведения достаточно трудоемких многоэтапных монтажно-демонтажных работ по наращиванию штанги при ее спуске и подъеме вместе с затонувшим объектом. Последнее обстоятельство исключает возможность использования способа для быстрого подъема затонувшего объекта со дна моря, например, при спасении экипажа затонувшей подводной лодки.
Техническим результатом изобретения является обеспечение возможности быстрого подъема затонувшего объекта большого веса при значительной глубине водоема при минимальной трудоемкости и продолжительности спасательной операции.
Технический результат достигается тем, что в способе подъема затонувшего объекта, включающем опускание с находящегося над затонувшим объектом базового судна посредством подъемного механизма со стальным проволочным канатом траверсы с грузозахватным приспособлением, соединение грузозахватного приспособления с затонувшим объектом, подъем затонувшего объекта и фиксацию поднятого на поверхность водоема затонувшего объекта на базовом судне, согласно изобретению, сначала на траверсе с грузозахватным приспособлением закрепляют симметрично продольной оси траверсы блок из ракетных движителей с регулируемой силой тяги с возможностью размещения ракетных движителей по обе стороны от бортов затонувшего объекта, при этом оси движителей располагают симметрично друг относительно друга под острыми углами к вертикальной оси симметрии траверсы с наклоном движителей в сторону от указанной оси и расположением осей движителей вне корпуса затонувшего объекта при его захвате грузозахватным приспособлением, после чего траверсу вместе с ними опускают на дно водоема и размещают грузозахватное приспособление и блок из ракетных движителей по обе стороны от затонувшего объекта, включают ракетные движители с суммарной силой тяги, меньшей веса спускаемого устройства в воде, и размывают с помощью реактивных струй от работающих ракетных движителей донный грунт по обе стороны от затонувшего объекта, после чего ракетные движители выключают и соединяют грузозахватное приспособление с затонувшим объектом, затем снова включают ракетные движители с силой тяги, рассчитанной на отрыв затонувшего объекта от дна водоема, а после отрыва затонувшего объекта от дна водоема переводят ракетные движители в режим работы с суммарной силой тяги, рассчитанной на преодоление веса затонувшего объекта в воде, одновременно с отрывом затонувшего объекта от дна водоема с реверсом включают подъемный механизм, выбирая слабину стального проволочного каната и корректируя направление движения затонувшего объекта при его подъеме за счет натяжения проволочного каната и путем изменения режима работы ракетных движителей по обе стороны от траверсы, а после подъема затонувшего объекта и фиксации поднятого затонувшего объекта на базовом судне работающие ракетные движители выключают.
Способ подъема затонувшего объекта поясняется на примере работы реализующего этот способ комплекса, представленного на чертеже, где на фиг.1 показан поперечный разрез по базовому судну, на фиг.2 - вид А-А по фиг.1.
Комплекс для подъема затонувшего объекта содержит базовое судно-катамаран, состоящее из двух корпусов 1 и 2, грузоподъемный механизм 3, выполненный, например, в виде мостового крана и кинематически связанный с помощью системы стальных проволочных канатов 4 с траверсой 5, которая снабжена грузозахватным приспособлением 6. На траверсе 5 закрепляется симметрично продольной оси 7 траверсы 5 блок из ракетных движителей 8 с регулируемой силой тяги с возможностью размещения грузозахватного приспособления 6 и блока из ракетных движителей 8 по обе стороны от затонувшего объекта 9. При этом оси движителей 8 располагают симметрично друг относительно друга под острыми углами α к вертикальной оси симметрии 10 траверсы 5 с наклоном движителей 8 в сторону от указанной оси 10 и расположением осей движителей 8 вне корпуса затонувшего объекта 9 при его захвате грузозахватным приспособлением 6, с направлением вершины сдвоенного угла 2α вниз. Максимальное значение силы тяги, развиваемой всеми ракетными движителями 8, принимают не меньше максимально возможного усилия отрыва затонувшего объекта 9 от дна 11 водоема. 12 - поверхность водоема. 13 и 14 - вымоины в донном грунте, образующиеся в результате его размыва после предварительного включения ракетных движителей на неполную мощность.
Комплекс для подъема затонувшего объекта действует следующим образом. На траверсе 5 закрепляют блок из вертикально ориентированных ракетных движителей 8. После размещения базового судна 1, 2 над затонувшим объектом 9 с помощью грузоподъемного механизма 3 траверсу 5 с грузозахватным приспособлением 6 и блоком из ракетных движителей 8 опускают на дно 11 водоема до затонувшего объекта 9 и размещают грузозахватное приспособление 6 и блок ракетных движителей 8 по обе стороны от бортов затонувшего объекта 9. Далее включают ракетные движители 8 с суммарной силой тяги, меньшей веса спускаемого устройства (5, 6, 8) в воде, и с помощью реактивных струй от работающих ракетных движителей 8 размывают донный грунт (13 и 14) по обе стороны от бортов затонувшего объекта 9. При этом за счет наклонного расположения ракетных движителей 8 с обращением их сопел в сторону затонувшего объекта 9 повышается эффективность воздействия на донный грунт реактивных струй движителей 8. После удаления донного грунта из-под затонувшего объекта 9 вдоль его бортов ракетные движители 8 выключают и соединяют грузозахватное приспособление 6 с затонувшим объектом 9. Благодаря предварительному размыву донного грунта вдоль затонувшего объекта 9 и его удаления от бортов, облегчается и ускоряется захват затонувшего объекта 9. При этом также может быть упрощена и удешевлена конструкция самого грузозахватного приспособления 6 за счет уменьшения его рабочего усилия при захвате. Кроме того, повышается надежность захвата и фиксации затонувшего объекта 9 за счет максимального приближения рабочих органов грузозахватного приспособления 6 к бортам и днищу затонувшего объекта 9.
После соединения грузозахватного приспособления 6 с затонувшим объектом 9 снова одновременно включают все ракетные движители 8 в режиме их работы с максимальной силой тяги, рассчитанной на отрыв затонувшего объекта 9 от дна 11 водоема. Затонувший объект 9, соединенный с траверсой 5 посредством грузозахватного приспособления 6, за счет развиваемой ракетными движителями 8 максимальной силы тяги отрывается от дна 11 водоема. После отрыва затонувшего объекта 9 от дна 11 ракетные движители 8 переводят в режим работы с обеспечением ими суммарной силы тяги, рассчитанной на преодоление веса затонувшего объекта 9 в воде. При работе ракетных движителей 8 в этом режиме затонувший объект 9 поднимается вместе с траверсой 5, грузозахватным приспособлением 6 и блоком ракетных движителей 8 к поверхности 12 водоема.
Одновременно с отрывом затонувшего объекта 9 от дна 11 водоема включают с реверсом грузоподъемный механизм 3, обеспечивающий выбор слабины в системе стальных проволочных канатов 4 и корректировку направления движения на подъем траверсы 5 с затонувшим объектом 9 за счет натяжения каната 4, а также дополнительно за счет изменения режима работы ракетных движителей 8 по обе стороны от траверсы 5. Возможность дополнительной корректировки траектории движения затонувшего объекта 9 при его подъеме обеспечивается за счет наклонного расположения ракетных движителей 8 симметрично относительно вертикальной оси симметрии 10 траверсы 5. Возможность дополнительной корректировки траектории подъема затонувшего объекта 9 позволяет повысить надежность операции подъема затонувшего объекта 9. Необходимость в этом может возникнуть, например, в связи с наличием подводных течений в водоеме. После достижения затонувшим объектом 9 поверхности 12 водоема и выхода верхней части корпуса затонувшего объекта 9 из воды при продолжающейся работе ракетных движителей 8 в том же режиме подъем затонувшего объекта 9 автоматически прекращается из-за уменьшения влияния архимедовой силы. Поднятый на поверхность 12 водоема затонувший объект 9 фиксируют на базовом судне 1, 2. Во время выполнения этой операции продолжающие работать ракетные движители 8 вместе с подъемным механизмом 3 поддерживают на плаву затонувший объект 9. После того, как затонувший объект 9 зафиксируют на базовом судне 1, 2, ракетные движители 8 выключают. На этом процесс подъема затонувшего объекта 9 завершается.
Отличительные признаки изобретения обеспечивают быстрый подъем затонувшего объекта значительного веса с большой глубины при минимальной трудоемкости и минимальной продолжительности спасательной операции с повышением надежности захвата затонувшего объекта на дне водоема и его подъема с возможностью стабилизации траектории подъема с помощью наклонно расположенных ракетных движителей.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОДЪЕМА ЗАТОНУВШЕГО ОБЪЕКТА | 2008 |
|
RU2366592C1 |
| КОМПЛЕКС ДЛЯ ПОДЪЕМА ЗАТОНУВШЕГО ОБЪЕКТА | 2008 |
|
RU2366591C1 |
| СПОСОБ ПОДЪЕМА ЗАТОНУВШЕГО ОБЪЕКТА | 2007 |
|
RU2335427C1 |
| КОМПЛЕКС ДЛЯ ПОДЪЕМА ЗАТОНУВШЕГО ОБЪЕКТА С МОРСКОГО ДНА | 2006 |
|
RU2312039C1 |
| СПОСОБ ПОДЪЕМА ЗАТОНУВШЕГО ОБЪЕКТА И КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2312038C1 |
| СПОСОБ ПОДЪЕМА ЗАТОНУВШЕГО ОБЪЕКТА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2062732C1 |
| СПОСОБ ПОДЪЕМА ЗАТОНУВШЕГО ОБЪЕКТА И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2002 |
|
RU2226165C2 |
| УСТРОЙСТВО ДЛЯ ПОДЪЕМА ЗАТОНУВШЕГО ОБЪЕКТА | 2005 |
|
RU2288131C1 |
| УСТРОЙСТВО ДЛЯ ПОДЪЕМА ЗАТОНУВШЕГО ОБЪЕКТА | 2006 |
|
RU2301759C1 |
| УСТРОЙСТВО ДЛЯ ПОДЪЕМА ЗАТОНУВШЕГО ОБЪЕКТА | 2004 |
|
RU2272741C1 |
Изобретение относится к области проведения работ по подъему затонувших объектов, например атомных подводных лодок. Способ подъема затонувшего объекта включает опускание с находящегося над затонувшим объектом базового судна посредством подъемного механизма со стальным проволочным канатом траверсы с грузозахватным приспособлением, соединение грузозахватного приспособления с затонувшим объектом, подъем затонувшего объекта и фиксацию поднятого на поверхность водоема затонувшего объекта на базовом судне. При этом для размыва донного грунта по обе стороны от затонувшего объекта, отрыва от дна и подъема на поверхность водоема затонувшего объекта используют блок из вертикально ориентированных ракетных движителей с регулируемой силой тяги, с возможностью размещения грузозахватного приспособления и ракетных движителей по обе стороны от бортов затонувшего объекта. Снижается трудоемкость подъема затонувшего объекта. 2 ил.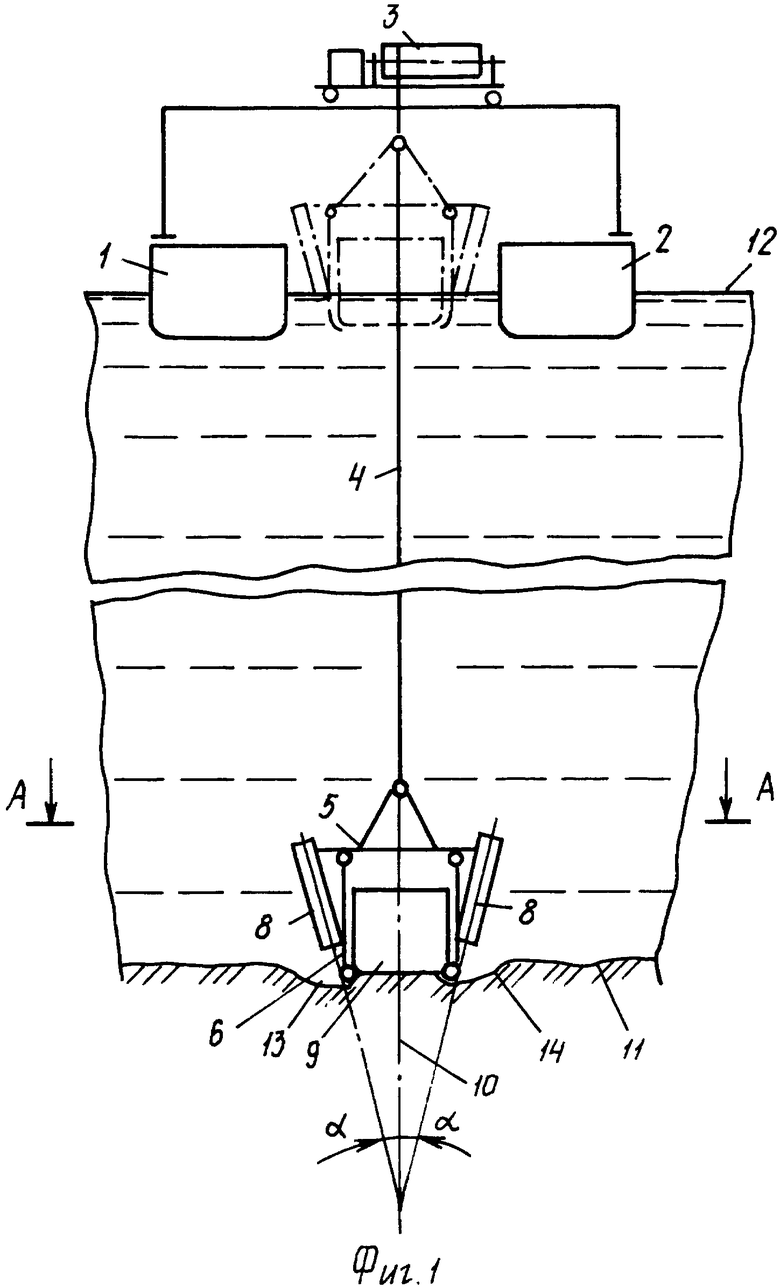
Способ подъема затонувшего объекта, включающий опускание с находящегося над затонувшим объектом базового судна посредством подъемного механизма со стальным проволочным канатом траверсы с грузозахватным приспособлением, соединение грузозахватного приспособления с затонувшим объектом, подъем затонувшего объекта и фиксацию поднятого на поверхность водоема затонувшего объекта на базовом судне, отличающийся тем, что сначала на траверсе с грузозахватным приспособлением закрепляют симметрично продольной оси траверсы блок из вертикально ориентированных ракетных движителей с регулируемой силой тяги с возможностью размещения грузозахватного приспособления и ракетных движителей по обе стороны от бортов затонувшего объекта, при этом оси движителей располагают симметрично относительно друг друга под острыми углами к вертикальной оси симметрии траверсы с наклоном движителей в сторону от указанной оси и расположением осей движителей вне корпуса затонувшего объекта при его захвате грузозахватным приспособлением, после чего траверсу вместе с ними опускают на дно водоема и размещают грузозахватное приспособление и блок из ракетных движителей по обе стороны от бортов затонувшего объекта, включают ракетные движители с суммарной силой тяги меньшей веса спускаемого устройства в воде и размывают с помощью реактивных струй от работающих ракетных движителей донный грунт по обе стороны от затонувшего объекта, после чего ракетные движители выключают и соединяют грузозахватное приспособление с затонувшим объектом, затем снова включают ракетные движители с силой тяги, рассчитанной на отрыв затонувшего объекта от дна водоема, а после отрыва затонувшего объекта от дна водоема переводят ракетные движители в режим работы с суммарной силой тяги, рассчитанной на преодоление веса затонувшего объекта в воде, одновременно с отрывом затонувшего объекта от дна водоема с реверсом включают подъемный механизм, выбирая слабину стального проволочного каната и корректируя направление движения затонувшего объекта при его подъеме за счет натяжения проволочного каната и путем изменения режима работы ракетных движителей по обе стороны от траверсы, а после подъема затонувшего объекта и фиксации поднятого затонувшего объекта на базовом судне работающие ракетные движители выключают.
| КОМПЛЕКС ПРЕИМУЩЕСТВЕННО ДЛЯ ПОДНЯТИЯ ЗАТОНУВШИХ ОБЪЕКТОВ | 2003 |
|
RU2240256C1 |
| Грузоподъемное судно катамаранного типа | 1977 |
|
SU885101A1 |
| НАКЛОННЫЙ ПОДЪЕМНИК ЯДЕРНОГО РЕАКТОРА | 2016 |
|
RU2614518C1 |

