Изобретение относится к комплексам для подъема затонувших объектов, например атомных подводных лодок, с больших глубин.
Известен способ подъема затонувшего объекта (прототип), включающий в себя опускание с находящегося над затонувшим объектом базового судна посредством подъемного механизма секционной последовательно наращиваемой штанги нулевой плавучести, снабженной траверсой с грузозахватным приспособлением, с фиксацией штанги на базовом судне при монтаже очередной секции, соединение секционной штанги с затонувшим объектом посредством захвата, посекционный подъем штанги с фиксацией ее на базовом судне при демонтаже очередной верхней секции и фиксацию поднятого на поверхность водоема затонувшего объекта на базовом судне (SU №885101. Кл. В63С 7/02, 1977 г.).
Однако известный способ и реализующее его комплекс характеризуются значительными нагрузками на подъемный механизм, что ограничивает возможности его использования подъемом затонувших объектов небольшого веса, значительной продолжительностью во времени операции подъема, что вызвано малой рабочей скоростью подъема, связанной с необходимостью проведения трудоемких многоэтапных монтажных работ по наращиванию штанги. Последнее обстоятельство исключает возможность использования способа для быстрого подъема затонувшего объекта со дна моря, например, при необходимости спасения экипажа подводной лодки, затонувшей на большой глубине.
Техническим результатом изобретения является обеспечение возможности быстрого подъема затонувшего объекта большого веса при значительной глубине водоема при минимальной трудоемкости и продолжительности спасательной операции.
Технический результат достигается тем, что в комплексе для подъема затонувшего объекта, включающем базовое судно-катамаран, размещенный на нем подъемный механизм со стальным проволочным канатом, траверсу с грузозахватным приспособлением, согласно изобретению на траверсе с грузозахватным приспособлением симметрично продольной ее оси закреплен блок из вертикально ориентированных ракетных движителей с регулируемой силой тяги с возможностью размещения по обе стороны от его продольной оси ракетных движителей с силой тяги, рассчитанной на отрыв затонувшего объекта от дна водоема, а грузозахватное приспособление выполнено в виде шарнирно установленных на траверсе рычагов с отогнутыми в сторону продольной оси траверсы нижними кромками с возможностью независимого поворота всех рычагов относительно своих шарниров, при этом рычаги размещены в плане в пролетах между смежными ракетными движителями, в исходном положении рычаги в вертикальной плоскости ориентированы под острым углом к вертикали с ориентированием его вершины вверх и кинематически связаны с помощью силовых цилиндров со штоками с траверсой, а корпуса силовых цилиндров шарнирно соединены с траверсой с размещением каждого шарнира в средней части корпуса силового цилиндра, при этом нижние кромки рычагов перед захватом затонувшего объекта размещены на уровне, превышающем положение его днища на величину возможного погружения затонувшего объекта в донный грунт. Нижние кромки рычагов могут быть выполнены вилообразной формы.
Комплекс для подъема затонувшего объекта представлен на чертежах, где на фиг.1 показан поперечный разрез по базовому судну, на фиг.2 - вид А-А по фиг.1, на фиг.3 - вид Б по фиг.1.
Комплекс для подъема затонувшего объекта содержит базовое судно-катамаран, состоящее из двух корпусов 1 и 2, грузоподъемный механизм 3, выполненный, например, в виде мостового крана и кинематически связанный с помощью стальных проволочных канатов 4 с траверсой 5 решетчатой конструкции, которая снабжена грузозахватным приспособлением. На траверсе 5 закреплен симметрично ее продольной оси 6 блок 7 из вертикально ориентированных ракетных движителей 8 с регулируемой силой тяги. При этом максимальное значение силы тяги, развиваемой всеми ракетными движителями 8, принято не меньше максимально возможного усилия отрыва затонувшего объекта 9 от дна 10 водоема 11. Грузозахватное приспособление выполнено в виде шарнирно 12 и 13 установленных на траверсе 5 рычагов 14 и 15 с отогнутыми в сторону продольной оси 6 траверсы 5 нижними кромками 16 и 17 с возможностью независимого поворота всех рычагов 14 и 15 с каждой стороны траверсы 5 относительно своих шарниров 12 и 13. При этом рычаги 14 и 15 размещены в плане в пролетах между смежными ракетными движителями 8 с каждой стороны блока 7. В исходном положении рычаги 14 и 15 в вертикальной плоскости ориентированы под острым углом α к вертикали 18 с ориентированием его вершины вверх и кинематически связаны с помощью силовых цилиндров 19 и 20 с траверсой 5. Корпуса силовых цилиндров 19 и 20 с помощью шарниров 21 и 22 соединены с траверсой 5 с размещением шарниров 21 и 22 в средней части корпусов силовых цилиндров 19 и 20. В исходном положении нижние кромки 16 и 17 рычагов 14 и 15 перед захватом затонувшего объекта 9 размещены на уровне, превышающем положение его днища на величину h возможного погружения затонувшего объекта 9 в донный грунт. Нижние кромки 16 и 17 рычагов 14 и 15 могут быть выполнены вилообразной формы 23 (фиг.3). 24 и 25 - шарниры штоков 26 и 27 силовых цилиндров 19 и 20, 28 - поверхность водоема 11, 29 - положение рычагов 14 и 15 при захвате корпуса затонувшего объекта 9, 30 - положение объекта 9 в поднятом положении.
Комплекс для подъема затонувшего объекта действует следующим образом. На траверсе 5 закрепляют блок 7 из вертикально ориентированных ракетных движителей 8. После размещения базового судна-катамарана с корпусами 1, 2 над затонувшим объектом 9 с помощью грузоподъемного механизма 3 траверсу 5 с грузозахватным приспособлением и блоком 7 из ракетных движителей 8 опускают на дно 10 водоема 11 до затонувшего объекта 9 с размещением ракетных движителей 8 по обе стороны от бортов затонувшего объекта 9. Далее включают все силовые цилиндры 19 и 20. размещенные на траверсе 5 по обе стороны от бортов затонувшего объекта 9. При выдвижении штоков 26 и 27 силовых цилиндров 19 и 20 все рычаги 14 и 15 поворачиваются в вертикальной плоскости относительно своих шарниров 12 и 13 в сторону затонувшего объекта 9, прорезая своими отогнутыми кромками 16 и 17 донный грунт и подхватывая затонувший объект 9 снизу за его днище (положение 29 на фиг.1). При этом благодаря независимому приводу каждого рычага обеспечивается надежный захват рычагами 14 и 15 с отогнутыми нижними кромками 16 и 17 корпуса затонувшего объекта 9. Это достигается за счет того, что, несмотря на то, что часть рычагов 14 и 15 может не повернуться на полный угол α из-за наличия возможных непреодолимых преград (валуны, выходы скального грунта), большая часть рычагов 14 и 15 преодолевает сопротивление взрезыванию донного грунта и подхватывает корпус затонувшего объекта 9 снизу. Выполнение нижних кромок 16 и 17 рычагов 14 и 15 вилообразной формы 23 позволяет уменьшить сопротивления внедрения рычагов 14 и 15 в донный грунт. После соединения грузозахватного приспособления с затонувшим объектом 9 одновременно включают все ракетные движители 8 в режиме их работы с максимальной силой тяги, рассчитанной на отрыв затонувшего объекта 9 от дна 10 водоема 11. Затонувший объект 9, соединенный с траверсой 5 посредством грузозахватного приспособления, за счет развиваемой ракетными движителями 8 максимальной силы тяги отрывается от дна 10. После отрыва затонувшего объекта 9 от дна 10 ракетные движители 8 переводят в режим работы с обеспечением ими суммарной силы тяги, рассчитанной на преодоление веса затонувшего объекта 9 в воде. При работе ракетных движителей 8 в этом режиме затонувший объект 9 поднимается вместе с траверсой 5, грузозахватным приспособлением и блоком 7 ракетных движителей 8 к поверхности 28 водоема 11. Одновременно с отрывом затонувшего объекта 9 от дна 10 водоема 11 включают с реверсом грузоподъемный механизм 3, обеспечивающий выбор слабины стального проволочного каната 4 и корректировку направления движения на подъем траверсы 5 с затонувшим объектом 9. После достижения затонувшим объектом 9 поверхности 12 водоема 11 и выхода верхней части корпуса затонувшего объекта 9 из воды при продолжающейся работе ракетных движителей 8 в том же режиме подъем затонувшего объекта 9 автоматически прекращается из-за уменьшения влияния архимедовой силы. Поднятый на поверхность 12 водоема 11 затонувший объект 9 (положение 30) фиксируют на базовом судне 1, 2. Во время выполнения этой операции продолжающие работать ракетные движители 8 вместе с подъемным механизмом 3 поддерживают на плаву затонувший объект 9. После того, как затонувший объект 9 зафиксируют на базовом судне 1,2, ракетные движители 8 выключают. На этом процесс подъема затонувшего объекта 9 завершается.
Отличительные признаки изобретения обеспечивают быстрый подъем затонувшего объекта значительного веса с большой глубины при минимальной трудоемкости и минимальной продолжительности спасательной операции.
Комплекс для подъема затонувшего объекта включает базовое судно-катамаран, размещенный на нем подъемный механизм со стальным проволочным канатом, траверсу с грузозахватным приспособлением. На траверсе с грузозахватным приспособлением симметрично продольной ее оси закреплен блок из вертикально ориентированных ракетных движителей с регулируемой силой тяги с возможностью размещения по обе стороны от его продольной оси ракетных движителей. Сила тяги ракетных движителей рассчитана на отрыв затонувшего объекта от дна водоема. Грузозахватное приспособление выполнено в виде шарнирно установленных на траверсе рычагов с возможностью независимого поворота всех рычагов относительно своих шарниров. В исходном положении рычаги в вертикальной плоскости ориентированы под острым углом к вертикали и кинематически связаны с помощью силовых цилиндров со штоками с траверсой. При этом нижние кромки рычагов перед захватом затонувшего объекта размещены на уровне, превышающем положение его днища на величину возможного погружения затонувшего объекта в донный грунт. Снижается трудоемкость спасательной операции. 1 з.п. ф-лы, 3 ил.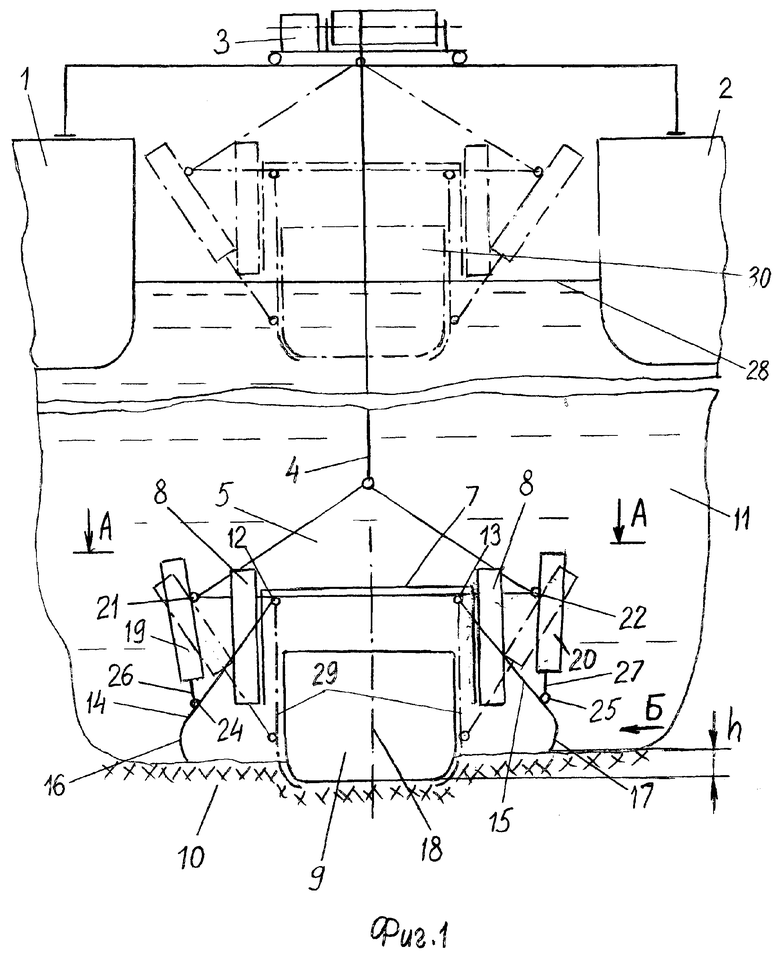
1. Комплекс для подъема затонувшего объекта, включающий базовое судно-катамаран, размещенный на нем подъемный механизм со стальным проволочным канатом, траверсу с грузозахватным приспособлением, отличающийся тем, что на траверсе с грузозахватным приспособлением симметрично продольной ее оси закреплен блок из вертикально ориентированных ракетных движителей с регулируемой силой тяги с возможностью размещения по обе стороны от его продольной оси ракетных движителей с силой тяги, рассчитанной на отрыв затонувшего объекта от дна водоема, а грузозахватное приспособление выполнено в виде шарнирно установленных на траверсе рычагов с отогнутыми в сторону продольной оси траверсы нижними кромками с возможностью независимого поворота всех рычагов относительно своих шарниров, при этом рычаги размещены в плане в пролетах между смежными ракетными движителями, в исходном положении рычаги в вертикальной плоскости ориентированы под острым углом к вертикали с ориентированием его вершины вверх и кинематически связаны с помощью силовых цилиндров со штоками с траверсой, а корпуса силовых цилиндров шарнирно соединены с траверсой с размещением каждого шарнира в средней части корпуса силового цилиндра, при этом нижние кромки рычагов перед захватом затонувшего объекта размещены на уровне, превышающем положение его днища на величину возможного погружения затонувшего объекта в донный грунт.
2. Комплекс по п.1, отличающийся тем, что нижние кромки рычагов выполнены вилообразной формы.
| КОМПЛЕКС ПРЕИМУЩЕСТВЕННО ДЛЯ ПОДНЯТИЯ ЗАТОНУВШИХ ОБЪЕКТОВ | 2003 |
|
RU2240256C1 |
| Грузоподъемное судно катамаранного типа | 1977 |
|
SU885101A1 |
| НАКЛОННЫЙ ПОДЪЕМНИК ЯДЕРНОГО РЕАКТОРА | 2016 |
|
RU2614518C1 |

