Изобретение относится к коррекции результатов измерений влажности радиозондом.
Радиозонд представляет собой измерительное устройство, которое используют при измерениях климатических условий. Радиозонд может переноситься вверх от поверхности земли через слои воздуха с помощью специального газового баллона, в результате чего измеряемая атмосфера, а также условия окружающей среды измерительного устройства изменяются динамически. Метеорологические измерения выполняют измерительными приборами в радиозонде, и в этом случае измеряемыми переменными обычно являются температура, влажность, давление и ветер (и/или местоположение). Определение местоположения зонда может быть основано, например, на способах с использованием глобальной системы позиционирования (GPS) или сети Лоран, и, кроме того, скорость и направление ветра могут быть найдены на основе изменений информации о местоположении. Данные измерений измерительных приборов передаются радиопередатчиком в радиозонде через радиоприемник на земле в наземное оборудование для дальнейшей обработки. Анализ результатов измерений выполняется на поверхности земли или в радиозонде, например, посредством соответствующего компьютерного программного обеспечения/алгоритма.
Условия окружающей среды при измерении радиозондом являются трудными: в числе прочего измерения осуществляются при большом диапазоне измеряемых переменных, дожде, влажности, переохлаждении, конденсации и перенасыщении. Кроме того, возникают погрешности измерений, обусловленные инерционностью измерительных датчиков радиозонда (временной задержкой) и радиационным теплообменом, происходящим в атмосфере, например, при солнечном излучении и инфракрасном излучении ночью.
Чтобы повысить точность измерений, выполняемых радиозондом, были разработаны способы исключения погрешностей из результатов измерений температуры, обусловленных среди прочего временной задержкой и радиационным теплообменом.
Измерение влажности является еще более трудным само по себе и вследствие того, что результат измерения влажности в дополнение к упомянутым выше факторам погрешностей также зависит от температуры. При измерении влажности осуществляют калибровку относительно используемого диапазона влажности и температуры, в результате чего результат измерений включает в себя поправку на температурную зависимость (датчик и измеряемый воздух находятся при одинаковой температуре). Однако известные поправки к измерению влажности не включают в себя поправку к результатам измерений влажности радиозондом, особенно применительно к погрешностям, непосредственно или косвенно являющимся следствием радиационного теплообмена.
Последние достижения в прогнозировании и исследовании климатических условий и в традиционном прогнозировании погоды накладывают еще более жесткие требования к точности результатов измерений влажности, особенно в верхних слоях тропосферы и стратосферы, в которых низкие температуры сочетаются с низкой концентрацией водяного пара (в стратосфере) или с высоким содержанием водяного пара (в верхних слоях тропосферы), что делает условия измерений чрезвычайно сложными. Кроме того, влажность быстро изменяется в зависимости от времени и местоположения. Точность измерений влажности является важным показателем качества при прогнозировании погоды. Кроме того, для понимания парникового эффекта и прогнозирования изменений в атмосфере измерения влажности являются существенным фактором.
Обычно результаты измерений влажности, предоставляемые различными радиозондами, как таковые не являются достаточно точными для, например, точного исследования и прогноза климатических условий. Поэтому необходимо повысить точность результатов измерений влажности.
Одна задача настоящего изобретения заключается в создании способа коррекции результатов измерений влажности радиозондом и особенно коррекции погрешностей измерений влажности, непосредственно или косвенно являющихся следствием радиационного теплообмена. Обычно радиационный теплообмен, вследствие коротковолнового солнечного излучения или вследствие длинноволнового теплового излучения объекта (инфракрасного излучения), непосредственно или косвенно приводит к погрешностям измерений влажности.
Основная идея изобретения заключается в определении применительно к измерению влажности, по меньшей мере, одного текущего значения параметра так называемых условий окружающей среды и коррекции результата измерения влажности с помощью указанного текущего значения параметра условий окружающей среды. Кроме того, основная идея некоторых вариантов осуществления изобретения заключается в коррекции показателя влажности, измеренного датчиком влажности, численным путем и/или с помощью корректирующих значений, сохраняемых в соответствующей структуре данных.
Согласно первому объекту изобретения реализован способ коррекции результатов измерений влажности радиозондом относительно погрешностей, являющихся следствием радиационного теплообмена, при этом радиозонд содержит, по меньшей мере, датчик влажности, заключающийся в том, что
заблаговременно формируют структуру данных, которая содержит корректирующие значения результатов измерений влажности в различных условиях окружающей среды, при этом условия окружающей среды определяют в указанной структуре данных как функцию, по меньшей мере, одного параметра условий окружающей среды, или заблаговременно определяют математическую функцию, с помощью которой можно вычислить корректирующее значение для результата измерения влажности, соответствующее, по меньшей мере, одному текущему значению параметра условий окружающей среды, при этом указанный параметр условий окружающей среды является переменной, имеющей влияние в окружающей среде датчика влажности, а указанные корректирующие значения определяют так, что они корректируют погрешности, являющиеся следствием радиационного теплообмена,
измеряют влажность Um окружающей среды указанным датчиком влажности,
определяют текущее значение, по меньшей мере, одного значения параметра условий окружающей среды, и
вычисляют непосредственно или косвенно влажность U со скорректированной погрешностью по указанной измеренной влажности Um окружающей среды и корректирующему значению, соответствующему указанному, по меньшей мере, одному текущему значению параметра условий окружающей среды в указанной структуре данных, или корректирующему значению, вычисленному с помощью указанной математической функции.
Измеренный показатель влажности Um может быть ранее скорректирован и прокалиброван относительно одного или нескольких различных факторов.
В данном случае переменная, имеющая влияние в окружающей среде датчика влажности, означает «внешний мир» датчика влажности. Упомянутый выше параметр условий окружающей среды может относиться, например, к некоторой переменной, оказывающей влияние на результат измерения влажности, к такой, как давление, температура окружающей среды, влажность, высота места радиозонда, время зондирования радиозондом, интенсивность солнечного излучения, угол возвышения Солнца, местоположение радиозонда на земном шаре или скорость подъема радиозонда.
Корректирующее значение результатов измерений влажности может быть основано на или может зависеть от некоторой переменной, оказывающей влияние на влажность, такой, как давление, температура окружающей среды, влажность, высота места радиозонда, время зондирования радиозондом, интенсивность солнечного излучения, угол возвышения Солнца, местоположение радиозонда на земном шаре или скорость подъема радиозонда. Корректирующие значения могут быть определены, например, как функция давления Р воздуха и угла h возвышения Солнца или как функция влажности насыщения, зависящей от температуры (% rh - относительная влажность) и давления Р воздуха.
Согласно варианту осуществления изобретения указанные корректирующие значения представляют собой корректирующие значения уровня Δrh влажности насыщения, а влажность U со скорректированной погрешностью вычисляют по ΔUrh, соответствующему, по меньшей мере, одному текущему значению параметра условий окружающей среды, и измеренной влажности Um окружающей среды. Согласно альтернативному варианту осуществления указанные корректирующие значения могут быть точно корректирующими значениями ΔU уровня влажности, и в этом случае влажность U со скорректированной погрешностью вычисляют по ΔU, соответствующему указанному, по меньшей мере, одному текущему значению параметра условий окружающей среды, и измеренной влажности Um окружающей среды.
Согласно дальнейшему варианту осуществления изобретения указанные корректирующие значения представляют собой разности ΔTU между температурой окружающей среды и температурой датчика влажности, при этом указанный радиозонд содержит также датчик температуры, а способ включает в себя этапы, на которых
измеряют температуру ТТ окружающей среды указанным датчиком температуры,
вычисляют температуру TU датчика влажности по ΔTU, соответствующему указанному, по меньшей мере, одному текущему значению параметра окружающей среды, и указанной температуре ТТ окружающей среды, и
вычисляют влажность U со скорректированной погрешностью по вычисленной температуре TU датчика влажности, температуре ТТ окружающей среды и измеренной влажности Um окружающей среды.
Предпочтительно выполнять коррекцию/коррекции для температуры ТТ окружающей среды, а температуру ТТ окружающей среды со скорректированной погрешностью использовать при вычислении температуры TU датчика влажности и влажности U со скорректированной погрешностью.
Упомянутая выше структура данных может быть сформирована, например, путем выполнения соответствующих сравнительных измерений. Сравнительные измерения могут быть осуществлены, например, совместно с измерениями точки росы и радиолокационными измерениями. Корректирующие значения структуры данных являются разностями ΔTU между температурой окружающей среды и температурой датчика влажности, сравнительные измерения могут быть просто измерениями, относящимися к температурам окружающей среды и датчика влажности в различных условиях окружающей среды. Разности ΔTU между температурой окружающей среды и температурой датчика влажности указанной структуры данных могут быть определены, например, как функция давления Р воздуха и угла h возвышения Солнца, но также может быть использован другой подходящий способ определения. Структура данных может быть, например, таблицей, списком, вектором или другой подходящей структурой данных.
Согласно второму объекту изобретения реализовано устройство обработки данных для коррекции результатов измерений влажности радиозондом относительно погрешностей, являющихся следствием радиационного теплообмена, при этом радиозонд содержит, по меньшей мере, один датчик влажности, и это устройство обработки данных содержит заблаговременно сформированную структуру данных, которая содержит корректирующие значения результатов измерений влажности в различных условиях окружающей среды, указанные условия окружающей среды определены в указанной структуре данных как функция указанного, по меньшей мере, одного параметра условий окружающей среды, или запоминающее устройство, содержащее заблаговременно определенную математическую функцию, с помощью которой можно вычислить корректирующее значение результата измерения влажности, соответствующее, по меньшей мере, одному текущему значению параметра условий окружающей среды, указанный параметр условий окружающей среды является переменной, имеющей влияние в окружающей среде датчика влажности, а указанные корректирующие значения определены так, что они корректируют погрешности, являющиеся следствием радиационного теплообмена,
приемное средство для приема влажности Um, измеренной указанным датчиком влажности, и приема, по меньшей мере, одного текущего значения параметра условий окружающей среды, и
вычислительное средство для вычисления влажности U со скорректированной погрешностью, непосредственно или косвенно по указанной измеренной влажности Um окружающей среды и корректирующему значению, соответствующему значению указанного, по меньшей мере, одного параметра условий окружающей среды в указанной структуре данных, или корректирующему значению, вычисленному с помощью указанной математической функции.
Устройство обработки данных согласно изобретению может быть, например, любым подходящим устройством, таким, как компьютер общего назначения, процессор или сервер. Кроме того, рассматриваемое устройство обработки данных может быть полностью или частично расположено в радиозонде.
Согласно третьему объекту изобретения реализована компьютерная программа, и когда указанная компьютерная программа выполняется, она обеспечивает процедуру коррекции результатов измерений влажности радиозондом относительно погрешностей, являющихся следствием радиационного теплообмена, при этом радиозонд содержит, по меньшей мере, датчик влажности, и указанная компьютерная программа взаимодействует с
заблаговременно сформированной структурой данных, которая содержит корректирующие значения результатов измерений влажности в различных условиях окружающей среды, при этом условия окружающей среды определены в указанной структуре данных как функция, по меньшей мере, одного параметра условий окружающей среды, или с запоминающим устройством, которое содержит заблаговременно определенную математическую функцию, с помощью которой можно вычислить корректирующее значение, соответствующее, по меньшей мере, одному текущему значению параметра условий окружающей среды, указанный параметр условий окружающей среды является переменной, имеющей влияние в окружающей среде датчика влажности, а указанные корректирующие значения определены так, что они корректируют погрешности, являющиеся следствием радиационного теплообмена, при этом указанная компьютерная программа содержит
программный код для приема влажности Um, измеренной указанным датчиком влажности, и приема, по меньшей мере, одного текущего значения параметра условий окружающей среды и программный код для вычисления влажности U со скорректированной погрешностью, непосредственно или косвенно по указанной измеренной влажности Um окружающей среды и корректирующему значению, соответствующему значению указанного, по меньшей мере, одного параметра условий окружающей среды в указанной структуре данных, или корректирующему значению, вычисленному с помощью указанной математической функции.
Компьютерная программа согласно изобретению может быть реализована, например, как компьютерный программный продукт, записанный на подходящем носителе данных или как программное обеспечение, приданное соответствующему оборудованию обработки данных или радиозонду.
Зависимые пункты формулы изобретения относятся к предпочтительным вариантам осуществления изобретения. Содержимое зависимых пунктов формулы изобретения, относящееся к одному объекту изобретения, также может быть применено к другим объектам изобретения.
Теперь посредством примеров изобретение будет описано подробно со ссылками на сопровождающие чертежи, на которых:
фигура 1 - блок-схема последовательности операций, иллюстрирующая способ согласно варианту осуществления изобретения;
фигура 2 - таблица разностей между температурами датчика влажности и окружающей среды согласно варианту осуществления изобретения;
фигура 3 - упрощенная структурная схема устройства обработки данных согласно варианту осуществления изобретения.
В общих чертах в способе согласно варианту осуществления изобретения выполняют измерение так называемой нормальной влажности датчиком влажности, включенным в состав радиозонда, предназначенным для регистрации измеряемого значения влажности Um окружающей среды. В той же самой ситуации определяют текущее значение, по меньшей мере, одного параметра условий окружающей среды. Затем по этому значению измеренной влажности Um окружающей среды и этому текущему значению параметра (или параметров) условий окружающей среды непосредственно или косвенно вычисляют влажность U со скорректированной погрешностью.
Параметр условий окружающей среды может быть основан, например, на некоторой переменной, оказывающей влияние на результат измерения влажности, такой, как давление, температура окружающей среды, влажность, высота места радиозонда, время зондирования радиозондом, интенсивность солнечного излучения, угол возвышения Солнца, местоположение радиозонда на земном шаре или скорость подъема радиозонда.
Определение значения параметра условий окружающей среды может быть выполнено непосредственно или косвенно, например, вторым измерительным датчиком, включенным в состав радиозонда, или значение параметра условий окружающей среды может быть получено от источника, не зависящего от радиозонда. Например, угол возвышения Солнца, который может быть использован в качестве параметра условий окружающей среды, зависит от даты и времени и поэтому является переменной, не зависящей от радиозонда и измерений, выполняемых на нем.
Поэтому текущее значение параметра (или параметров) условий окружающей среды может быть использовано непосредственно для вычисления влажности с скорректированной погрешностью. Например, для этой цели может быть использована соответствующая функция или формула, зависящая от значения параметра условий окружающей среды и отсчета измеренной влажности. В качестве альтернативы текущее значение параметра условий окружающей среды может быть использовано косвенно. Косвенное вычисление с помощью параметра условий окружающей среды в данном случае означает, что с помощью значения параметра условий окружающей среды можно вычислить промежуточный результат или можно идентифицировать значение некоторого дополнительного параметра или коэффициента, или соответствующую арифметическую функцию.
В решении согласно варианту осуществления изобретения заблаговременно формируют структуру данных, и эта структура данных содержит корректирующие значения результатов измерений влажности в различных условиях окружающей среды, при этом условия окружающей среды определены в указанной структуре данных как функция указанного, по меньшей мере, одного параметра условий окружающей среды, а влажность U со скорректированной погрешностью вычисляют непосредственно или косвенно по указанной измеренной влажности Um окружающей среды и корректирующему значению, соответствующему, по меньшей мере, одному текущему значению параметра условий окружающей среды в указанной структуре данных. Указанное корректирующее значение может быть, например, корректирующим коэффициентом, в результате чего фактическое значение вычисляют путем умножения или по разнице (поправке) между корректируемым значением и фактическим значением, при этом фактическое значение вычисляют путем суммирования. Детали этого варианта осуществления подробно рассмотрены в этом описании ниже.
В другом варианте осуществления подходящую математическую функцию используют вместо упомянутой выше структуры данных. Затем с помощью определенной математической функции вычисляют корректирующее значение результата измерения влажности, соответствующее указанному, по меньшей мере, одному текущему значению параметра условий окружающей среды, а влажность U со скорректированной погрешностью вычисляют непосредственно или косвенно по указанной измеренной влажности Um окружающей среды и указанному вычисленному корректирующему значению.
Вариант осуществления изобретения в основном основан на анализе и коррекции ошибок, обусловленных радиационным теплообменом, по разности ΔTU температур датчика влажности и окружающей среды. Фактическая влажность U является функцией температуры TU датчика влажности и влажности Um, измеренной датчиком:
U=f(TU,Um).
В известных решениях предшествующего уровня техники обычно предполагается, что температура окружающей среды и температура датчика влажности соответствуют друг другу. Здесь следует заметить, что это по существу приводит к погрешностям в результатах измерений влажности, поскольку могут быть значительные различия между температурой датчика влажности и температурой окружающей среды, обусловленные, в числе прочего, эффектом радиационного теплообмена, наблюдающимся в качестве эффекта среды измерения. В настоящем изобретении различие между температурой датчика влажности и температурой окружающей среды учитывают при анализе и коррекции результатов измерений влажности.
На фиг.1 представлена блок-схема последовательности операций способа согласно варианту осуществления изобретения, предназначенного для коррекции результатов измерений влажности радиозондом.
На этапе 10 заблаговременно образуют таблицу разностей ΔTU между температурой окружающей среды и температурой датчика влажности (корректирующие значения TU относительно температуры окружающей среды) для различных условий окружающей среды. Содержимое таблицы этого вида рассмотрено более подробно ниже применительно к фигуре 2.
На этапе 11 температуру ТТ окружающей среды измеряют датчиком температуры радиозонда. В данном случае предпочтительно корректировать температуру ТТ окружающей среды в зависимости от различных факторов ошибок, таких, как радиационный теплообмен и/или временная задержка. Коррекция температурных измерений на радиационный теплообмен рассматривается, например, в статье James K. Luers, “Temperature error of Vaisala RS90 radiosonde”, Journal of Atmospheric and Oceanic Technology, vol.14, №6, December 1997, pp.1520-1532. На практике измеренную температуру ТТ окружающей среды корректируют так, чтобы она с возможно большей точностью была равна фактической температуре окружающей среды. Можно также использовать результат измерения без коррекции погрешности, но в этом случае погрешности измерения температуры воспроизводятся при коррекции погрешности измерения влажности. Затем на этапе 12 датчиком влажности измеряют влажность Um окружающей среды. Измеренная таким образом влажность Um представляет собой результат так называемого обычного измерения, получаемого с помощью датчика влажности.
На этапе 13 заблаговременно вычисляют температуру TU датчика влажности с помощью таблицы, образованной на этапе 10, и по температуре ТТ окружающей среды. (В данном случае для получения более точных конечных результатов можно использовать значение ТТ со скорректированной погрешностью.) Из таблицы для ΔTU находят значение, которое соответствует условиям окружающей среды, которые превалируют при выполнении измерения влажности (измерения Um), и это значение используют для вычисления TU.
Температура TU датчика влажности может быть вычислена, например, следующим образом:
TU=TT+kU·ΔTU,
где ТТ - температура окружающей среды, предпочтительно со скорректированной погрешностью;
kU - коэффициент движения воздуха относительно номинального значения; и
ΔTU - разность между температурой окружающей среды и температурой датчика влажности (поправка относительно температуры окружающей среды) в текущих (номинальное kU) условиях окружающей среды.
Если требуется, рассматриваемое значение ΔTU может быть скорректировано, в дополнение к kU, также относительно других, оказывающих влияние термодинамических коэффициентов.
Коэффициент kU движения воздуха отражает изменение коэффициента теплопередачи между воздухом и датчиком, когда движение воздуха изменяется. Табулированное (номинальное) значение ΔTU соответствует определенному (номинальному) значению движения воздуха, и поэтому коэффициент движения воздуха выражается как изменения коэффициента движения воздуха между фактической и номинальной ситуациями. Его определение может быть осуществлено с помощью термодинамического анализа рассматриваемого условия теплопередачи путем использования различных приближений и результатов экспериментальных измерений, например, следующим образом:
 ,
,
где v - фактическая скорость подъема радиозонда;
v0 - номинальная скорость подъема радиозонда, и эта скорость обычно составляет 5-6 м/с;
а - постоянная (например, порядка 1); и
b - постоянная (например, порядка -0,5, зависящая от характеристик используемого датчика).
Фактическая скорость подъема радиозонда может быть найдена в определенный период времени, например, в силу того, что высоту радиозонда вычисляют в определенный момент времени на основании давления Р воздуха, температуры Т и влажности U, при этом скорость подъема представляет собой изменение высоты между различными моментами времени, деленное на разность времен между рассматриваемыми моментами времени. Для таблицы выбирают номинальную скорость подъема радиозонда на основании концепции, предпочтительной для измерения средней скорости подъема, и эта скорость соответствует скорости движения воздуха, когда зонд переносится потоком воздуха.
Кроме того, коэффициент kU движения воздуха может быть определен следующим образом (на основании некоторого другого подходящего приближения условия теплопередачи):
 ,
,
где Р - давление воздуха; и
t - время.
Для определения коэффициента kU движения воздуха также могут быть использованы другие подходящие способы. Например, в коэффициенте движения воздуха можно учесть, что термодинамика и теплообмен пластинчатого (датчика влажности) и цилиндрического (датчика температуры) объектов являются различными, в результате чего коэффициент kU движения воздуха при измерении влажности обычно будет отличаться от коэффициента kT движения воздуха при измерении температуры.
После этого в соответствии с блок-схемой последовательности операций фигуры 1 на этапе 14 вычисляют влажность U со скорректированной погрешностью по температуре TU датчика влажности, определенной на этапе 13, температуре ТТ окружающей среды и измеренной влажности Um. (Кроме того, в данном случае с достижением преимущества можно использовать значение ТТ со скорректированной погрешностью.) Влажность со скорректированной погрешностью может быть вычислена, например, следующим образом:
Относительная влажность U при температуре Т определяется формулой
 ,
,
где еw(T) - парциальное давление насыщенного водяного пара (давление насыщенного пара) при температуре Т; и
е - фактическое давление пара при температуре Т.
В соответствии с определением измеренная влажность равна
 .
.
На основании этого можно вычислить фактическое давление е пара и путем подстановки вычисленного выше е в формулу согласно основному определению получить фактическую влажность U со скорректированной погрешностью:
 ,
,
где ТТ - температура окружающей среды, измеренная датчиком температуры, преимущественно со скорректированной погрешностью;
TU - температура датчика влажности;
Um - измеренная влажность;
ew(TU) - парциальное давление насыщенного водяного пара при температуре TU;
ew(TT) - парциальное давление насыщенного водяного пара при температуре ТТ; и
е(ТТ) - фактическое давление пара при температуре ТТ.
Парциальное давление ew насыщенного водяного пара может быть определено, например, с помощью приближения Уэкслера-Хайленда, широко известного в области метеорологии. Однако для специалиста в данной области техники очевидно, что в рамках объема изобретения могут быть использованы другие приближения.
На фигуре 2 представлена таблица 20 согласно варианту осуществления изобретения разностей ΔTU между температурами датчика влажности и окружающей среды (корректирующие значения для TU относительно температуры окружающей среды). В дневное время температура датчика влажности выше, чем температура воздуха, а в ночное время ситуация является противоположной.
Указанная таблица может быть образована, например, путем выполнения в различных условиях окружающей среды сравнительных измерений температуры окружающей среды и температуры датчика влажности, посредством чего можно легко образовать таблицу разностей этих температур.
В качестве альтернативы при образовании таблицы можно использовать, например, соответствующие результаты измерений датчиком точки росы или результаты измерений атмосферным радиолокатором или другими подходящими способами, с помощью которых могут быть найдены необходимые переменные. Значения разностей температур, необходимые для таблицы, могут быть определены также косвенно путем измерения в различных условиях окружающей среды и с последующим сравнением влажности посредством датчика влажности радиозонда и посредством способа измерения влажности, который является подходящим для сравнения и обеспечивает получение сравнительной влажности, в которой обнаруживаются известные факторы погрешности используемого датчика. Кроме того, могут быть использованы различия замеров влажности в измерениях, выполненных в ночное и дневное время. Далее, значения для таблицы могут быть выведены на основании разностей результатов измерений влажности радиозондом и фактической влажности. Эта процедура является малодоступной, поскольку измерение, которое дает фактическую влажность, обычно является трудным и/или дорогостоящим в осуществлении и, следовательно, неэкономичным способом для использования при непрерывных измерениях.
Описанные выше измерения выполняют атмосферным радиолокатором (например, лидаром дифференциального поглощения или рамановским лидаром) или датчиками точки росы или образования инея, широко распространенными в области метеорологических измерений, вследствие чего они не будут подробно рассматриваться в настоящей заявке.
В таблице 20 условия окружающей среды изменяются как функция давления Р воздуха и угла h возвышения Солнца. По горизонтальной оси представлено давление Р воздуха, а по вертикальной оси представлен угол h возвышения Солнца. Угол возвышения Солнца в метеорологии является широко известной переменной, которая изменяется как функция местоположения, даты и времени, а давление воздуха является переменной, также обычно измеряемой в радиозонде, так что значение ΔTU, соответствующее определенному измерению влажности, непосредственно имеется в таблице.
В ячейках таблицы представлены некоторые гипотетические значения для разностей ΔTU температур. Например, угол возвышения Солнца равен -7 (Солнце находится на 7° ниже горизонта, то есть это ночь), а давление воздуха составляет 1000 гПа, разность ΔTU температур обычно равна 0°С (или несколько ниже 0°С, поскольку ночью инфракрасное излучение сильно зависит от уровня давления). Поэтому фактически датчик может быть холоднее по сравнению с измеренной температурой воздуха. Соответственно, разность ΔTU температур, соответствующая углу возвышения Солнца 90 и давлению воздуха 3 гПа, может быть, например, 10°С. Следовательно, разность температур может иметь очевидное изменение. Разность температур, то есть корректирующее значение ΔTU, теперь сдвинуто в более теплом направлении относительно температуры воздуха, поскольку солнечное излучение нагрело датчик. Необходимо отметить, что при реальном применении значения в таблице могут, конечно, отклоняться от представленных значений, поскольку при реальном применении табличные значения базируются на измерениях, выполняемых в рассматриваемых условиях окружающей среды.
Кроме того, значения, представленные в таблице 20, могут быть сохранены в виде некоторой другой подходящей структуры данных, например, связного списка или вектора.
Согласно варианту осуществления изобретения указанные корректирующие значения из корректирующей таблицы представляют собой корректирующие значения уровня Δrh влажности насыщения, а влажность U со скорректированной погрешностью вычисляют по значению ΔUrh, соответствующему, по меньшей мере, одному текущему значению параметра условий окружающей среды, и измеренной влажности Um окружающей среды.
Корректирующее значение уровня ΔUrh влажности насыщения может быть найдено в корректирующей таблице, например, как функция влажности Urh насыщения, зависящей от температуры и имеющегося давления Р воздуха, например, для угла возвышения Солнца h=90. Затем конечная поправка уровня ΔUrh' влажности насыщения может быть вычислена следующим образом:
ΔUrh'=n·kU·ΔUrh,
где kU - коэффициент движения воздуха относительно номинального значения;
n - нормированная переменная, изменяющаяся как функция угла h возвышения Солнца и давления Р воздуха; и
ΔUrh - корректирующее значение уровня влажности насыщения в текущих (номинальный kU) условиях окружающей среды, получаемое из таблицы.
Если требуется, рассматриваемое значение ΔUrh может быть скорректировано, в дополнение к kU, также относительно других, оказывающих влияние термодинамических коэффициентов.
Теперь влажность U со скорректированной погрешностью может быть вычислена в соответствии с наблюдением измеряемого уровня влажности, например, по формуле:
 ,
,
где Um - измеренная влажность;
Urh - уровень влажности насыщения; и
ΔUrh' - конечная поправка уровня влажности насыщения % rh.
Корректирующее значение ΔUrh уровня влажности насыщения может быть найдено в корректирующей таблице также как функция угла h возвышения Солнца и давления Р воздуха. Затем конечная поправка ΔUrh' уровня влажности насыщения может быть вычислена следующим образом:
ΔUrh'=kU·ΔUrh,
где kU - коэффициент движения воздуха относительно номинального значения; и
ΔUrh - корректирующее значение уровня влажности насыщения в текущих (номинальный kU) условиях окружающей среды, получаемое из таблицы.
Если требуется, рассматриваемое значение ΔUrh может быть скорректировано, в дополнение к kU, также относительно других, оказывающих влияние термодинамических коэффициентов.
Теперь влажность со скорректированной погрешностью может быть вычислена, например, по формуле:
,
где Um - измеренная влажность;
Urh - уровень влажности насыщения; и
ΔUrh' - конечная поправка уровня влажности насыщения % rh.
Согласно варианту осуществления изобретения указанные корректирующие значения из корректирующей таблицы являются непосредственно корректирующими значениями ΔU уровня влажности насыщения (например, в процентах измеренной влажности Um окружающей среды), и в этом случае влажность U со скорректированной погрешностью вычисляют по ΔU, соответствующей, по меньшей мере, одному текущему параметру условий окружающей среды, и измеренной влажности Um окружающей среды.
Корректирующее значение ΔU уровня влажности может быть найдено в корректирующей таблице, например, как функция давления Р воздуха и угла h возвышения Солнца. Затем конечная поправка ΔU' влажности может быть вычислена, например, следующим образом:
ΔU'=kU·ΔU,
где kU - коэффициент движения воздуха относительно номинального значения; и
ΔU - корректирующее значение уровня влажности, в процентах, в текущих (номинальный kU) условиях окружающей среды, полученное из таблицы.
Если требуется, рассматриваемое значение ΔU может быть скорректировано, в дополнение к kU, также относительно других, оказывающих влияние термодинамических коэффициентов.
Теперь влажность со скорректированной погрешностью может быть вычислена, например, по формуле:
 ,
,
где Um - измеренная влажность;
ΔU' - конечная поправка влажности в процентах.
На фигуре 3 показана упрощенная структурная схема устройства 30 обработки данных согласно варианту осуществления изобретения, при этом устройство обработки данных может быть, например, компьютером общего назначения или сервером или может быть включенным в состав радиозонда.
Устройство 30 обработки данных содержит блок 31 обработки и интерфейс 32 ввода-вывода, подключенный к нему, и через этот интерфейс устройство обработки данных связано с другими устройствами либо по стационарной линии, либо по беспроводной линии передачи данных, по которой данные могут быть введены в устройство обработки данных и по которой данные выводятся из устройства обработки данных. Обычно интерфейс ввода-вывода содержит интерфейс пользователя (ИП, не показанный на фигуре), включающий в себя, например, дисплей и клавиатуру и, возможно, некоторое другое управляющее устройство (на фигуре не показанное), с помощью которого рассматриваемое устройство обработки данных может быть использовано. Кроме того, изобретение может быть использовано в приборах, которые не имеют реального интерфейса пользователя, например, в радиозонде.
Блок 31 обработки содержит процессор (на фигуре не показанный), запоминающее устройство 33 и компьютерную программу 34, записанную в запоминающем устройстве, предназначенную для выполнения в указанном процессоре. В соответствии с компьютерной программой 34 процессор управляет устройством обработки данных, чтобы вывести подпрограмму для коррекции результатов измерений влажности радиозондом, особенно в части погрешностей, являющихся следствием радиационного теплообмена.
Устройство обработки данных управляется так, что оно принимает измеренную влажность Um с датчика влажности и текущее значение, по меньшей мере, одного параметра условий окружающей среды. Устройство обработки данных может содержать радиоприемник для приема результатов измерений радиозондом непосредственно от радиозонда, или результаты измерений могут быть введены в устройство обработки данных другим подходящим способом через интерфейс 32 ввода-вывода. Кроме того, устройство обработки данных управляется так, что оно непосредственно или косвенно вычисляет влажность U со скорректированной погрешностью по измеренной влажности Um окружающей среды и принятому, по меньшей мере, одному текущему значению параметра условий окружающей среды.
Кроме того, согласно варианту осуществления изобретения в запоминающем устройстве 33 хранится заблаговременно образованная таблица 35, которая содержит корректирующие значения результатов измерений влажности в различных условиях окружающей среды, при этом условия окружающей среды определяются как функция, по меньшей мере, одного параметра условий окружающей среды. В таком случае компьютерная программа 34 осуществляет управление процессором для непосредственного или косвенного вычисления влажности U со скорректированной погрешностью по измеренной влажности Um окружающей среды и корректирующему значению, указанному в таблице 35, соответствующему, по меньшей мере, одному параметру окружающей среды.
При альтернативном применении изобретения компьютерная программа 34 осуществляет управление процессором для вычисления корректирующего значения результата измерения влажности, соответствующего принятому, по меньшей мере, одному текущему значению параметра условий окружающей среды, с помощью заблаговременно определенной математической функции и для использования вычисленного корректирующего значения при вычислении влажности U со скорректированной погрешностью.
В соответствии с дальнейшим вариантом осуществления изобретения устройство обработки данных управляется так, что оно принимает температуру ТТ окружающей среды, измеренную датчиком температуры в радиозонде. Кроме того, устройство обработки данных управляется так, что оно вычисляет температуру TU датчика влажности по температуре ТТ окружающей среды и с помощью таблицы 35, при этом указанная таблица содержит разности ΔTU между температурой окружающей среды и температурой датчика влажности в различных условиях окружающей среды, и вычисляет влажность U со скорректированной погрешностью по температуре TU датчика влажности, температуре ТТ окружающей среды и измеренной влажности Um.
Выше были описаны посредством примеров элементы изобретения в сочетании с предпочтительными вариантами осуществления исключительно без ограничения изобретения этими примерами. Специалистам в данной области техники понятно, что это изобретение не ограничено элементами, описанными выше, и что изобретение может быть реализовано другим способом без отклонения от отличительных признаков изобретения. Возможности реализации и использования изобретения ограничены только приложенной формулой изобретения. Поэтому различные варианты реализации изобретения, определенные формулой изобретения, как и эквивалентные реализации, находятся в рамках объема изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ ДЕЙСТВУЮЩЕГО ЗНАЧЕНИЯ НАПРЯЖЕНИЯ В ЭЛЕКТРИЧЕСКИХ ЦЕПЯХ ПЕРЕМЕННОГО ТОКА | 2006 |
|
RU2298194C1 |
| СИСТЕМА РАДИОЗОНДИРОВАНИЯ АТМОСФЕРЫ С ПАКЕТНОЙ ПЕРЕДАЧЕЙ МЕТЕОРОЛОГИЧЕСКОЙ ИНФОРМАЦИИ | 2013 |
|
RU2529177C1 |
| СПОСОБ ИЗМЕРЕНИЯ АКТИВНОЙ МОЩНОСТИ НАГРУЗКИ В ЭЛЕКТРИЧЕСКИХ ЦЕПЯХ ПЕРЕМЕННОГО ТОКА | 2002 |
|
RU2229723C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЕМПЕРАТУРЫ ТОЧКИ РОСЫ ГАЗА И УСТРОЙСТВО ДЛЯ ЕГО АВТОМАТИЧЕСКОГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2290628C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СИСТЕМАТИЧЕСКОЙ ПОГРЕШНОСТИ ВНУТРИРЕАКТОРНЫХ ТЕРМОДАТЧИКОВ | 1997 |
|
RU2137226C1 |
| Датчик влажности аэрологического радиозонда | 1985 |
|
SU1315920A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МАКСИМАЛЬНОЙ ВЫХОДНОЙ МОЩНОСТИ СОЛНЕЧНЫХ БАТАРЕЙ КОСМИЧЕСКОГО АППАРАТА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2354592C2 |
| АЭРОЛОГИЧЕСКИЙ РАДИОЗОНД | 1999 |
|
RU2162238C1 |
| Способ запуска камеры сгорания газотурбинного двигателя | 2022 |
|
RU2786964C1 |
| СПОСОБ ТЕРМОРЕГУЛИРОВАНИЯ КОСМИЧЕСКИХ АППАРАТОВ С СОЛНЕЧНЫМИ БАТАРЕЯМИ | 2004 |
|
RU2279376C2 |
Изобретение относится к способу коррекции результатов измерений влажности радиозондом относительно погрешностей, являющихся следствием радиационного теплообмена. Сущность: измеряют (12) влажность Um окружающей среды датчиком влажности в радиозонде. Определяют текущее значение, по меньшей мере, одного параметра условий окружающей среды. Вычисляют (14) влажность U со скорректированной погрешностью непосредственно или косвенно по указанной измеренной влажности Um окружающей среды и корректирующему значению, соответствующему указанному, по меньшей мере, одному текущему значению параметра условий окружающей среды. Технический результат: повышение точности результатов. 2 н. и 8 з.п. ф-лы, 3 ил.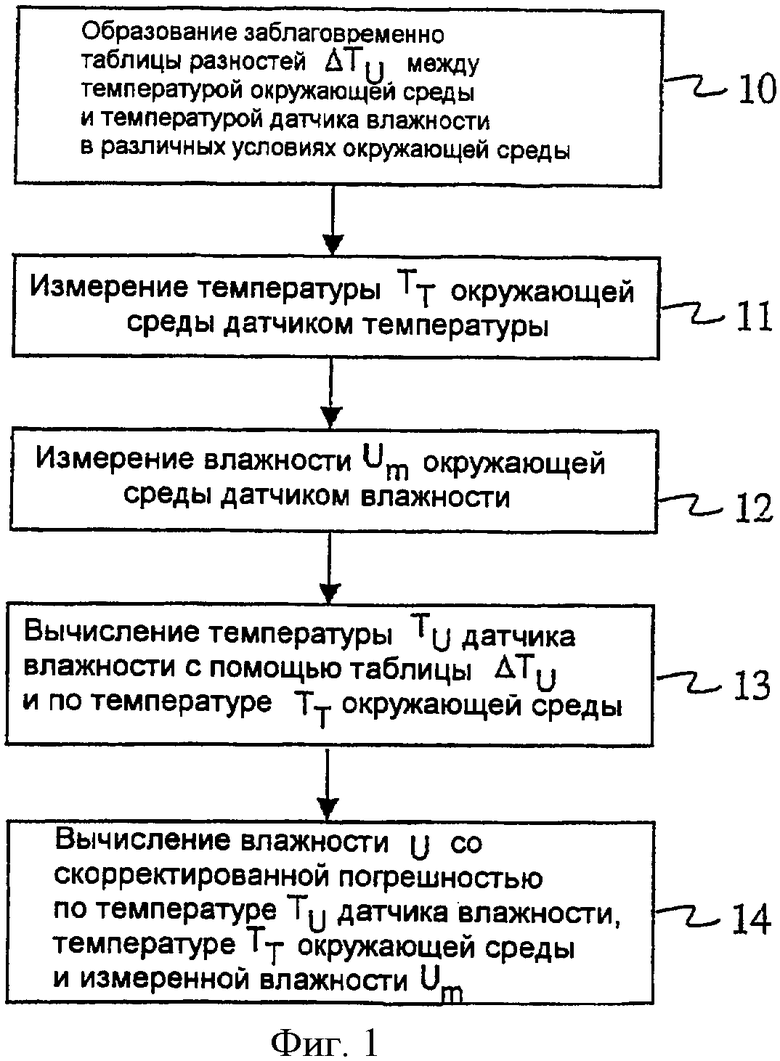
1. Способ коррекции результатов измерений влажности радиозондом относительно погрешностей, являющихся следствием радиационного теплообмена, при этом радиозонд содержит, по меньшей мере, датчик влажности и датчик температуры, характеризующийся тем, что способ включает в себя этапы, на которых
определяют корректирующие значения для результатов измерений влажности в различных условиях окружающей среды, при этом указанные корректирующие значения систематизируют в заблаговременно сформированную (10) структуру (20) данных или вычисляют с помощью заблаговременно определенной математической функции, указанные условия окружающей среды определяют как функцию, по меньшей мере, одного параметра условий окружающей среды, указанный параметр условий окружающей среды является переменной, имеющей влияние в окружающей среде датчика влажности, а указанные корректирующие значения определяют так, что они корректируют погрешности, являющиеся следствием радиационного теплообмена,
измеряют (12) влажность Um окружающей среды указанным датчиком влажности,
определяют текущее значение, по меньшей мере, одного параметра условий окружающей среды,
измеряют (11) температуру ТT окружающей среды указанным датчиком температуры,
вычисляют (13) температуру ТU датчика влажности по указанной температуре ТТ окружающей среды и указанным корректирующим значениям, которые являются разностями ΔТU между измеренной температурой ТТ окружающей среды и температурой ТU датчика влажности и соответствуют определенному текущему значению указанного, по меньшей мере, одного параметра условий окружающей среды, и вычисляют (14) влажность U со скорректированной погрешностью по вычисленной температуре ТU датчика влажности, измеренной температуре ТТ окружающей среды и измеренной влажности Um окружающей среды.
2. Способ по п.1, отличающийся тем, что указанный параметр условий окружающей среды относится к, по меньшей мере, одной переменной, оказывающей влияние на результат измерения влажности, такой, как давление, температура окружающей среды, влажность, высота места радиозонда, время зондирования радиозондом, интенсивность солнечного излучения, угол возвышения Солнца, местоположение радиозонда на земном шаре или скорость подъема радиозонда.
3. Способ по п.1, отличающийся тем, что указанные разности ΔTU между температурой ТТ окружающей среды и температурой ТU датчика влажности определяют на основании сравнительных измерений.
4. Способ по п.1, отличающийся тем, что указанные разности ΔТU между температурой ТТ окружающей среды и температурой ТU датчика влажности определяют как функцию давления Р воздуха и угла h возвышения Солнца.
5. Способ по п.1, отличающийся тем, что указанные разности ΔТU между температурой ТТ окружающей среды и температурой ТU датчика влажности определяют как функцию влажности насыщения (% rh), зависящей от температуры и давления Р воздуха.
6. Способ по п.1, отличающийся тем, что корректируют погрешность измеренной температуры ТТ окружающей среды до вычисления температуры ТU датчика влажности, и используют температуру ТТ окружающей среды со скорректированной погрешностью при вычислении температуры ТU датчика влажности и влажности U со скорректированной погрешностью.
7. Способ по п.1, отличающийся тем, что температуру ТU датчика влажности вычисляют следующим образом:
TU=TT+kU·ΔTU,
где ТТ - температура окружающей среды, измеренная датчиком температуры, предпочтительно со скорректированной погрешностью;
kU - коэффициент движения воздуха относительно номинального значения; и
ΔТU - разность между температурой окружающей среды и температурой датчика влажности в текущих условиях окружающей среды.
8. Способ по п.1, отличающийся тем, что влажность U со скорректированной погрешностью определяют следующим образом:
где ТТ - температура окружающей среды, измеренная датчиком температуры, преимущественно со скорректированной погрешностью;
TU - температура датчика влажности;
Um - измеренная влажность;
ew(TU) - парциальное давление насыщенного водяного пара при температуре TU;
еw(ТТ) - парциальное давление насыщенного водяного пара при температуре ТТ; и
е(ТТ) - фактическое давление пара при температуре ТТ.
9. Устройство (30) обработки данных для коррекции результатов измерений влажности радиозондом относительно погрешностей, являющихся следствием радиационного теплообмена, при этом радиозонд содержит, по меньшей мере, датчик влажности и датчик температуры, характеризующееся тем, что оно содержит
запоминающее устройство (33), содержащее корректирующие значения для результатов измерений влажности в различных условиях окружающей среды, при этом указанные корректирующие значения систематизированы в заблаговременно сформированную структуру (35) данных или вычислены с помощью заблаговременно определенной математической функции, запомненной в запоминающем устройстве (33), указанные условия окружающей среды определены как функция, по меньшей мере, одного параметра условий окружающей среды, указанный параметр условий окружающей среды является переменной, имеющей влияние в окружающей среде датчика влажности, а указанные корректирующие значения определены так, что они корректируют погрешности, являющиеся следствием радиационного теплообмена,
приемное средство (32) для приема влажности Um окружающей среды, измеренной указанным датчиком влажности, и приема температуры ТТ окружающей среды, измеренной указанным датчиком температуры, и приема текущего значения, по меньшей мере, одного параметра условий окружающей среды,
вычислительное средство (31, 34) для вычисления температуры ТU датчика влажности по указанной измеренной температуре ТТ окружающей среды и указанным корректирующим значениям, которые являются разностями ΔТU между измеренной температурой ТТ окружающей среды и температурой ТU датчика влажности и соответствуют текущему значению указанного, по меньшей мере, одного параметра условий окружающей среды, и для вычисления влажности U со скорректированной погрешностью по вычисленной температуре ТU датчика влажности, измеренной температуре ТТ окружающей среды и измеренной влажности Um окружающей среды.
10. Устройство обработки данных по п.9, отличающееся тем, что указанное устройство обработки данных расположено в указанном радиозонде.
| JOURNAL OF ATMOSPHERIC AND OCEANIC TECHNOLOGY | |||
| КИПЯТИЛЬНИК НЕПРЕРЫВНОГО ДЕЙСТВИЯ | 1923 |
|
SU739A1 |
| Способ изготовления электрических сопротивлений посредством осаждения слоя проводника на поверхности изолятора | 1921 |
|
SU19A1 |
| Временные методические указания по производству радиозондирования атмосферы системой МАРЛ-А - МРЗ-ЗАТ | |||
| Устройство для устранения мешающего действия зажигательной электрической системы двигателей внутреннего сгорания на радиоприем | 1922 |
|
SU52A1 |
| Сумматор по модулю два | 1984 |
|
SU1191906A1 |
| АЭРОЛОГИЧЕСКИЙ РАДИОЗОНД | 1999 |
|
RU2162238C1 |

