Изобретение относится к радиотехнике и может быть использовано при модернизации и разработке новых систем радиозондирования (CP) с ускоренной передачей телеметрической информации с борта аэрологического радиозонда (АРЗ) на наземную радиолокационную станцию (РЛС).
Общей проблемой при проектировании и эксплуатации CP является создание высокоточных систем измерения координат АРЗ недорогих конструктивов АРЗ, обеспечивающих измерение с минимальной погрешностью метеорологических параметров атмосферы (МПА), надежную передачу телеметрической информации с борта АРЗ на наземную РЛС в оперативном радиусе действия системы АР3-РЛС. Самостоятельной проблемой при создании и эксплуатации CP является обеспечение надежной и точной передачи телеметрической информации о МПА с борта АРЗ на РЛС в условиях замирания сигнала радиозонда из-за его раскачивания и неравномерной диаграммы направленности антенны.
Отечественные системы радиозондирования атмосферы (CP) построены по угломерно-дальномерному методу измерения координат, скорости и направления движения радиозонда в свободной атмосфере. Измерение угловых координат: азимута (β), угла места (ε), а также наклонной дальности (Rн) осуществляется радиоимпульсным методом с активным ответом. Особенно эффективным оказалось использование в составе радиозондов сверхрегенеративных приемопередатчиков-ответчиков (СПП). Интенсивное излучение СПП обеспечивает надежную передачу телеметрической информации и сопровождение по угловым координатам. Высокая чувствительность СПП к радиоимпульсному запросному сигналу позволяет сформировать ответный сигнал по дальности в виде короткой паузы в излучении СПП при пониженной мощности передатчика запросных радиоимпульсов РЛС. Весьма важным в конечном счете оказывается тот факт, что система определения координат и канал передачи телеметрической информации системы радиозондирования работают на одной несущей частоте (см. В.И.Ермаков и др. "Системы зондирования атмосферы", Гидрометеоиздат, 1977, с.247-249).
Известна система радиозондирования атмосферы радиолокационного типа «Метеорит-РКЗ», работающая в диапазоне частот 1780 МГц (см. Ермаков В.И., Кузенков А.Ф., Юрманов В.А. Системы зондирования атмосферы. - Л.: Гидрометеоиздат, 1977. 304 с.). Ламповый радиозонд типа РКЗ снабжен сверхрегенеративным приемопередатчиком (СПП), который совместно с наземной РЛС «Метеорит» обеспечивает измерение угловых координат, наклонной дальности по запросному радиоимпульсу и передачу на РЛС метеорологической информации, которая осуществляется путем амплитудной манипуляции излучения СПП телеметрическим сигналом. Достоинством CP типа «Метеорит-РКЗ» является полная автономность работы, невысокая стоимость измерения МПА в оперативном радиусе действия до 250 км.
Недостатками системы являются, низкая помехозащищенность CP при амплитудной модуляции телеметрическим сигналом излучения СПП, большой интервал передачи цикла метеорологической информации (цикла телеметрических частот измерительного преобразователя АРЗ) в течение 20 секунд, что снижает надежность и точность измерения МПА в условиях замирания сигнала АРЗ при его раскачивании.
Известна система радиозондирования атмосферы радиолокационного типа АВК-МРЗ работающая в диапазоне 1780 МГц (Ефимов А.А. Принципы работы аэрологического информационно-вычислительного комплекса АВК-1. - М.: Гидрометеоиздат, 1989. 149 с.; Зайцева Н.А. Аэрология. Гидрометеоиздат. 1990, 325 с.). Полупроводниковый АРЗ типа МР3-3 снабжен сверхрегенеративным приемопередатчиком (СПП), который совместно с наземной РЛС АВК-1 обеспечивает измерение угловых координат, определение наклонной дальности по запросному радиоимпульсу и передачу на РЛС метеорологической информации, которая осуществляется путем модуляции поднесущей (суперирующей) частоты СПП телеметрическим сигналом. Достоинствами CP типа АВК-МРЗ являются полная автономность работы, низкая стоимость измерения МПА в оперативном радиусе действия до 250 км.
Недостатками системы при всех ее достоинствах являются значительное потребление электроэнергии, а также большой интервал передачи цикла метеорологической информации (цикла телеметрических частот измерительного преобразователя АРЗ) в течение 20 секунд, что снижает надежность и точность измерения МПА, нарушает устойчивость автосопровождения сигнала АРЗ по угловым координатам, затрудняет прием и обработку телеметрического сигнала при больших скважностях.
Известны однотипные малогабаритные полупроводниковые РЛС МАРЛ и «Вектор-М», которые совместно с АРЗ типа МР3-3 обеспечивают измерение угловых координат, определение наклонной дальности по запросному радиоимпульсу и передачу на РЛС метеорологической информации, которая осуществляется путем модуляции поднесущей (суперирующей) частоты СПП телеметрическим сигналом (см. Иванов В.Э., Фридзон М.Б., Ессяк С.П. Радиозондирование атмосферы. Технические и метрологические аспекты разработки и применения радиозондовых измерительных средств. Под ред. В.Э.Иванова. Екатеринбург: УрО РАН. 2004. 596 с. ISBN 5-7691-1513-0). Достоинствами CP типа МАРЛ-МРЗ, «Вектор-М»-МРЗ являются низкое энергопотребление, высокая автоматизация управления комплексом и обработки информации, полная автономность работы, низкая стоимость измерения МПА в оперативном радиусе действия CP (до 250 км) - ПРОТОТИП.
Недостатком всех систем и ПРОТОТИПА при всех их достоинствах является большой интервал передачи цикла метеорологической информации (цикла телеметрических частот измерительного преобразователя АРЗ) в течение 20 секунд, что снижает надежность и точность измерения МПА, нарушает устойчивость автосопровождения сигнала АРЗ по угловым координатам, затрудняет прием и обработку телеметрического сигнала при больших скважностях. При раскачивании радиозонда за счет неравномерности его диаграммы направленности на выходе приемного устройства РЛС при больших удалениях происходит замирания сигнала до 10-20 дБ с периодом 2-5 сек. При этом прекращается прием телеметрической информации РЛС, поскольку период одного цикла передачи телеметрической информации радиозонда составляет 20 сек.
Работа известных CP осуществляется следующим образом. Отечественные CP, находящиеся в эксплуатации на аэрологической сети Росгидромета РЛС типа АВК-1, МАРЛ, «Вектор-М», функционируют совместно с радиозондами типа МР3-3. Телеметрическая информация в АРЗ формируется в виде видеоимпульсов вторичного измерительного преобразователя (измерительного генератора), к которому последовательно подключаются сопротивления опорного (калибровочного) резистора, датчика температуры и датчика влажности. АРЗ передает информацию о МПА в течение одного цикла, длительность которого составляет Тц=20 сек, фиг.2. В течение этого интервала времени последовательно в течение 5 сек передаются частоты каналов: частота опорного (калибровочного) канала с периодом Топ=0,7 мсек и частоты телеметрических (измерительных) каналов температуры и влажности, периоды которых изменяются в зависимости от состояния датчиков в пределах Tt=0,8-60,0 мсек, Тu=0,8-10,0 мсек. Передача частоты каждого канала происходит в течение 5 сек. Информация о МПА содержится в Y-параметре, равном отношению периода опорной частоты Топ соответственно к периодам телеметрических частот Tt, Tu:

Обработка и выдача метеорологической информации осуществляется в ЭВМ наземной РЛС путем вычисления температуры и влажности по величинам принятых периодов Топ, Tt, Tu, известным коэффициентам калибровки измерительного преобразователя АРЗ и датчиков с циклом 20 сек. При таком методе передачи телеметрической информации возникают следующие проблемы:
- большой интервал времени получения метеорологической информации (20 сек) создает проблему его устойчивого приема при замираниях сигнала на больших удалениях радиозонда, поскольку интервал замирания сигнала обычно составляет порядка 2-5 сек. Появление хотя бы одного замирания сигнала в цикле (в течение 20 сек) передачи информации не позволяет вычислить Y-параметры и получить результат измерений;
- другая проблема возникает при попадании частоты телеметрических сигналов, вызванных паразитной амплитудной модуляцией излучения передатчика АРЗ, в полосу пропускания канала угловой автоматики РЛС и нарушении устойчивости автосопровождения АРЗ по угловым координатам;
- третья проблема связана с ограничениями в существующих CP на максимальное значение периода телеметрических частот измерительного преобразователя (ИП) АРЗ, равное Ттел.макс=60,0 мсек. Период телеметрических частот ИП определяется сопротивлением соответствующего датчика АРЗ. Это ограничение не позволяет использовать современные датчики температуры с малой постоянной времени на основе бусинковых терморезисторов, обладающих большим сопротивлением (порядка 2-4 МОм) на низких температурах порядка минус 80-90°C, т.к. период телеметрических частот в этом случае ИП значительно превышает допустимую величину Ттел.макс=60,0 мсек и наземной РЛС не обрабатывается;
- дополнительные трудности возникают при приеме импульсного телеметрического сигнала в приемном устройстве РЛС при изменении периода видеоимпульсов в значительных пределах Ттел=1,5-60,0 мсек, поскольку изменяется их скважность, постоянная составляющая сигнала в десятки раз, что затрудняет работу порогового устройства измерителя периода импульсов.
Техническим результатом предлагаемого решения является:
- повышение надежности приема телеметрической информации, передаваемой с борта АРЗ на наземную РЛС;
- повышение точности измерения координатно-телеметрической информации (КТИ), передаваемой с борта АРЗ на наземную РЛС;
- получение новых характеристик измеряемых параметров атмосферы, например турбулентности атмосферы;
- существенное снижение времени передачи МПА.
Для решения этой задачи предлагается система радиозондирования атмосферы с пакетной передачей информации, содержащая аэрологический радиозонд - АРЗ и базовую станцию - РЛС, блок предполетной подготовки АРЗ, состоящий из пульта предполетной подготовки и блока контроля и записи параметров АРЗ со следующими соединениями: пульт предполетной подготовки АРЗ через блок контроля и записи параметров АРЗ соединен двунаправленной шиной M1 со входами микроконтроллера АРЗ; в состав РЛС введены блок декодирования пакетной телеинформации и блок вторичной обработки телеинформации и выдачи сигналов метеопараметров атмосферы со следующими соединениями: однонаправленная шина М2 приемо-передающего устройства РЛС соединена через блок декодирования пакетной телеинформации с блоком вторичной обработки телеинформации и выдачи метеопараметров атмосферы, выход которого является выходом системы; блок предполетной подготовки выполнен отдельным конструктивом и соединен с аэрологическим радиозондом на время ввода формата пакетной информации, также по желанию заказчика может быть решен программно в микроконтроллере АРЗ; приемопередатчик аэрологического радиозонда выполнен по схеме сверхрегенератора и включает в себя последовательно соединенные: формирователь и модулятор суперирующего напряжения, цепь автосмещения и СВЧ- автогенератор, нагруженный на антенну.
На фиг.1 приведена структурная схема системы радиозондирования с пакетным методом передачи телеметрической информации, на которой показано:
1 - метеорологические параметры атмосферы (МПА), а именно: температура, давление, влажность и др.; 2 - аэрологический цифровой радиозонд (АРЗ); 3 - блок первичных и вторичных преобразователей МПА (БПВП); 4 - микроконтроллер АРЗ (МК); 5 - устройство сопряжения; 6 - вычислитель; 7 - формирователь и модулятор суперирующего напряжения сверхрегенеративного приемопередатчика (СПП); 8 - цепь автосмещения (АС); 9 - СВЧ-автогенератор СПП; 10 - блок предполетной подготовки (БПП) АРЗ; 11 - блок контроля и записи параметров АРЗ; 12 - пульт предполетной подготовки (ППП); 13 - собственно РЛС; 14 - приемо-передающее устройство РЛС (ППУ); 15 - система управления РЛС; 16 - блок декодирования ПТИ; 17 - блок вторичной обработки ТИ и выдачи МПА; А1 - антенна АРЗ; А2 - антенна РЛС; РК - радиоканал, M1 - двунаправленная шина связи, М2 - однонаправленная шина связи.
Система в целом по фиг.1 имеет следующие соединения. Метеорологические параметры атмосферы МПА 1 соединены с метеовходами АРЗ 2, выход которого через антенну А1 радиоканалом соединен с антенной А2 РЛС 13; выход РЛС 13 соединен с потребителями МПА. Блок предполетной подготовки БПП 10 двунаправленной шиной соединен с микроконтроллером МК 4 радиозонда АРЗ 2.
На фиг.2 изображены временные диаграммы, поясняющие принцип передачи телеметрической информации в серийной CP типа АВК-МРЗ. На фиг.2 изображен полный временной цикл Тц работы измерительного генератора радиозонда МР3-3, включающий временные интервалы опорного канала Топ; канала температуры Tt, канала влажности Тu, канала давления Тд серийной CP типа АВК-МРЗ.
На фиг.3 изображен фрагмент предлагаемой структуры цифрового пакета телеметрической информации АРЗ во временном масштабе.
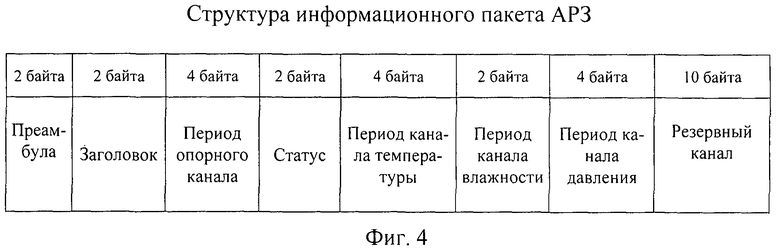
На фиг.4 приведена структура информационного пакета.
Указанные узлы и блоки CP могут быть выполнены на следующих элементах: датчики температуры и влажности 3 могут быть выполнены, например, по патентам РФ №2162238, №2162239, №2242752; датчик давления 3 может быть выполнен на основе датчиков типа МРХ (см. КАТАЛОГ фирмы МОТОРОЛА, 2007 г.); измерительный преобразователь может быть реализован по патенту №53462; устройство сопряжения 5, вычислитель и формирователь ПТИ 6, формирователь и модулятор суперирующего напряжения СПП 9 могут быть выполнены на микроконтроллере МК 4, который может быть реализован, например, на микросхемах семейства LPC2101FBD48 (см. Микроконтроллеры АРМ7. Пер. с англ. - М.: Додека-ХХ1, 2006); цепь автосмещения АС СПП 8, СВЧ-АГ СПП 7, антенна А1 могут быть выполнены по материалам патентов РФ №2172965, №2214614, №2470323, патентов на полезные модели №50682, №49283, №56001; штатная аэрологическая РЛС 13 может быть использована типа АВК-1, МАРЛ, «Вектор-М», (см. Иванов В.Э., Фридзон М.Б., Ессяк С.П. Радиозондирование атмосферы. Технические и метрологические аспекты разработки и применения радиозондовых измерительных средств. Под ред. В.Э.Иванова. - Екатеринбург: УрО РАН. 2004. 596 с. ISBN 5-7691-1513-0); блок декодирования ПТИ 15 и блок вторичной обработки ТИ и выдачи МПА 17 могут быть реализованы на микросхемах семейства LPC2101FBD48 (см. Микроконтроллеры АРМ7. Пер. с англ. - М.: Додека-ХХ1, 2006).
Предлагаемая радиолокационная CP с пакетной передачей телеметрической информации работает следующим образом.
На входе CP действуют метеорологические параметры атмосферы (МПА) 1: температура, влажность, давление. В состав аэрологического радиозонда АРЗ 2 входят: блок первичных (датчиков) и вторичных (измерительных) преобразователей МПА 3, микроконтроллер АРЗ МК 4, в состав которого соответственно входят: устройство сопряжения 5, вычислитель и формирователь пакетной телеметрической информации (ПТИ) 6, формирователь и модулятор суперирующего напряжения СПП 9, в состав СПП входят цепь автосмещения АС СПП 8, СВЧ-автогенератор СВЧ-АГ СПП 7 и приемопередающая антенна А1. В состав устройства предполетной подготовки УПП АРЗ 10 входят блок контроля и записи параметров АРЗ 11 и пульт предполетной подготовки АРЗ 12. В состав наземной РЛС 13 входят: приемопередающая антенна А2, приемопередающее устройство РЛС 14, блок декодирования ПТИ 15, система управления РЛС 16 и блок вторичной обработки телеметрической информации (ТИ) и выдачи МПА 17 потребителю информации МПА.
Блок предполетной подготовки 10 предназначен для ввода информации о первичных параметрах АРЗ (рабочей частоты передатчика, калибровочных коэффициентов датчиков) и контроля его функционирования перед запуском. С помощью пульта предполетной подготовки АРЗ 12, блока контроля и записи параметров АРЗ информация загружается через интерфейс ввода-вывода типа RS-232 в микроконтроллер МК 4 радиозонда АРЗ 2. Метеорологические параметры атмосферы МПА 1, например температура, влажность, давление, воздействуют на блок первичных (датчиков) и вторичных (измерительных) преобразователей АРЗ 3, выходные электрические сигналы которого в виде уровня напряжения, частоты или длительности видеоимпульсов подаются на вход устройства сопряжения 5, с выхода которого в виде цифрового кода поступают на вычислитель и формирователь пакетной телеметрической информации (ПТИ) 6 микроконтроллера 4. В вычислителе 6 происходит статистическая обработка телеметрической информации, полученная от каждого датчика в течение одного цикла измерения, равного 2 секундам. В каждом цикле измерения обеспечивается в течение 2 секунд определение всех МПА. Далее в процессоре МК 4 формируется цифровой пакет телеметрической информации, фиг.3. В структуру пакета вводится ряд служебной информации, обеспечивающей синхронизацию телеметрических каналов внутри пакета и синхронизацию текущего потока пакетов, который далее поступает на вход СПП АРЗ, фиг.4. СПП содержит генератор и модулятор суперирующего напряжения 9, цепь автосмещения 8, СВЧ-автогенератор и приемопередающую антенну А1.
Генератор и модулятор суперирующего напряжения реализованы в структуре МК 4, их параметры регулируются программно. Принцип работы СПП и методы модуляции его излучения подробно описаны в патентах РФ №2172965, №2214614, №2470323, патентах на полезные модели №50682, №49283, №56001.
Сигнал излученный АРЗ 2, содержащий телеметрическую информацию в пакетном виде, принимается антенной А2 с узкой диаграммой направленности на земной РЛС 13. Система управления РЛС 15 обеспечивает синхронизацию работы всех устройств и блоков РЛС 13. Технология измерения текущих координат АРЗ, а именно наклонной дальности импульсным методом, угловых координат методом равносигнальной зоны, описана в первоисточниках (Ефимов А.А. Принципы работы аэрологического информационно-вычислительного комплекса АВК-1. - М.: Гидрометеоиздат,1989. 149 с.; Зайцева Н.А. Аэрология. Гидрометеоиздат, 1990. 325 с.). Радиотехнический сигнал АРЗ оптимально обрабатывается в канале телеметрии приемного устройства РЛС и в форме цифрового потока видеоимпульсов подается на вход блока декодирования пакетной телеметрической информации 14, в котором осуществляется дешифрация пакетной информации и формирование ее в виде канальных телеметрических сигналов в цифровой форме, пропорциональных температуре, влажности, давлению. С выхода блока декодирования ПТИ 14 информация подается на вход блока вторичной обработки телеметрической информации (ТИ) 16, в котором происходит ее обработка и представление в виде метеорологических параметров атмосферы (МПА): графических зависимостей температуры, влажности, давления от высоты подъема АРЗ, стандартных аэрологических телеграмм для разных потребителей МПА.
Для обеспечения необходимой точности преобразования телеметрической информации, выработки точного времени циклов работы радиозонда, стабилизации суперирующей (поднесущей) частоты СПП и величины ее модуляции, синхронизации сигналов в АРЗ 2 используется микроконтроллер МК 4. При использовании процессора МК 4 осуществляется программная реализация всех функций для работы радиозонда. Программирование МК 4, ввод-вывод технологической информации при производстве и эксплуатации АРЗ осуществляется по последовательному интерфейсу RS-232. Применение МК в аэрологическом радиозонде позволяет осуществить современные более эффективные методы модуляции параметров поднесущей частоты, например, бинарную частотную (ЧИМ) и фазовую (ФИМ) импульсную модуляцию суперирующей частоты (BPSK). Осуществление ЧИМ и ФИМ суперирующей частоты с помощью МК осуществляется программно. В этом случае прием и демодуляция телеметрического сигнала наземной РЛС намного упрощается, т.к. опорный сигнал, необходимый для нормальной работы частотного или фазового детектора в канале телеметрии приемного устройства РЛС, достаточно просто синхронизируется при стабильной частоте суперирующих импульсов. Важнейшей задачей МК 4 является формирование пакетного режима передачи телеметрической информации. Передача пакетов производится в одностороннем (симплексном) режиме от радиозонда к аэрологическому комплексу. Битовая информация передаются известным методом частотно-импульсной модуляции (ЧИМ) поднесущей (суперирующей) частоты СПП.
Поскольку информационная полоса частот координатно-телеметрической информации не превышает ΔF<0,5 Гц [1], ее обновление осуществляется с темпом не реже один раз в две секунды. Вносимая в радиоканал избыточность позволяет исправлять отдельные битовые ошибки, которые могут возникать вследствие воздействия помех, и многократно дублировать пакеты для борьбы с замираниями сигнала (в основном из-за пространственных колебаний АРЗ). Скорость передачи данных в канале составляет 2,4 кбит/с. Способ кодирования бит - самосинхронизирующийся код типа Манчестер 2. Пакет передается без изменений в течение 2 сек. По окончании передачи текущего пакета сразу начинается передача нового пакета. Временных пауз между пакетами нет. Пакет состоит из двух частей. Первая часть - оперативно изменяющаяся информация. Вторая часть - дополнительная информация, которая передается гораздо реже. Всегда передается номер параметра и его значение. Структура одного из вариантов информационного пакета, передаваемого АРЗ, показана на фиг.3, фиг.4. Общая длина пакета равна 30 байт·8=240 бит. Для скорости передачи 2400 бит/с это означает, что за 2 секунды передается 20 одинаковых пакетов. Таким образом, телеметрическая информация в пакете передается в 200 раз быстрее, чем в известном режиме. Такая избыточность позволяет обойтись без помехоустойчивого кодирования. Восстановление ошибочных битов выполняется путем корреляционного анализа нескольких смежных пакетов. В теле пакета передаются данные телеметрического канала, это - первичные данные измерений (температура, влажность, давление и т.п.) и дополнительные вспомогательные данные в резервном канале. Важно отметить, что пакетный метод передачи информации с борта радиозонда позволяет использовать в качестве первичных преобразователей метеорологические датчики любого типа, отвечающие требованиям по точности градуировки статической характеристики преобразования (СХП), сохранности, динамическим параметрам.
Для расшифровки пакетов телеметрической информации необходима модернизация РЛС МАРЛ, «Вектор-М» путем введения в виде блока декодирования ПТИ 15 специальной подпрограммы, входящей в состав системного программного обеспечения РЛС. При этом обеспечивается стандартное сопряжение с блоком вторичной обработки ТИ и выдачи МПА 17. Все остальные характеристики РЛС и радиоканала CP - ширина спектра излучения СПП, чувствительность к запросному сигналу канала дальности, излучаемая мощность АРЗ и т.д. полностью соответствуют требованиям ТУ на СР.
В целом применение пакетной передачи телеметрической информации в радиолокационных CP позволяет:
- уменьшить длительность цикла передачи информации до 1-2 сек, тем самым повысить надежность приема телеметрической информации в условиях сильных замираний сигнала АРЗ;
- снизить уровень паразитной амплитудной модуляции (ПАМ) сигнала АРЗ за счет более однородного характера ПТИ и повысить устойчивость автоматического сопровождения АРЗ по угловым координатам;
- снять ограничения на длительность периодов измерительного преобразователя АРЗ и расширить возможность применения различных типов датчиков МПА;
- существенно упростить условия приема и обработки сигнала в приемном устройстве РЛС, тем самым повысить надежность приема телеметрической информации.
Таким образом, при использовании предлагаемого в материалах заявки пакетного метода передачи телеметрической информации с борта АРЗ на наземную РЛС существенно повышаются эксплуатационные характеристики отечественных радиолокационных СР.
| название | год | авторы | номер документа |
|---|---|---|---|
| РАДИОЛОКАЦИОННАЯ СИСТЕМА ЗОНДИРОВАНИЯ АТМОСФЕРЫ | 2014 |
|
RU2571870C1 |
| УНИФИЦИРОВАННАЯ СИСТЕМА РАДИОЗОНДИРОВАНИЯ АТМОСФЕРЫ | 2014 |
|
RU2576023C1 |
| РАДИОЛОКАЦИОННАЯ СИСТЕМА ЗОНДИРОВАНИЯ АТМОСФЕРЫ С ФАЗОМОДУЛИРОВАННЫМ КАНАЛОМ ТЕЛЕМЕТРИИ | 2021 |
|
RU2787777C1 |
| НАВИГАЦИОННО-РАДИОЛОКАЦИОННАЯ СИСТЕМА РАДИОЗОНДИРОВАНИЯ АТМОСФЕРЫ | 2022 |
|
RU2805163C1 |
| РАДИОЛОКАЦИОННО-НАВИГАЦИОННАЯ СИСТЕМА РАДИОЗОНДИРОВАНИЯ АТМОСФЕРЫ | 2022 |
|
RU2793597C1 |
| Многофункциональная система радиозондирования атмосферы | 2016 |
|
RU2626410C1 |
| МНОГОРЕЖИМНЫЙ АЭРОЛОГИЧЕСКИЙ КОМПЛЕКС | 2019 |
|
RU2710965C1 |
| АЭРОЛОГИЧЕСКИЙ РАДИОЗОНД С ГОМОДИННЫМ ПРИЕМОПЕРЕДАТЧИКОМ СИСТЕМЫ РАДИОЛОКАЦИОННОГО ЗОНДИРОВАНИЯ АТМОСФЕРЫ | 2024 |
|
RU2829602C1 |
| НАВИГАЦИОННЫЙ АЭРОЛОГИЧЕСКИЙ РАДИОЗОНД | 2022 |
|
RU2820052C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ ДО АЭРОЛОГИЧЕСКОГО РАДИОЗОНДА | 2023 |
|
RU2801741C1 |

Изобретение предназначено для систем радиозондирования с ускоренной передачей телеметрической информации с борта аэрологического радиозонда (АРЗ) на наземную радиолокационную станцию (РЛС). Достигаемый технический результат - повышение надежности приема телеметрической информации, передаваемой с борта АРЗ на наземную РЛС, повышение точности измерения информации, передаваемой с борта АРЗ на наземную РЛС, получение дополнительных характеристик измеряемых параметров атмосферы, например турбулентности атмосферы, снижение времени передачи информации. Указанный результат достигается за счет того, что система содержит АРЗ и базовую станцию - РЛС, при этом в состав АРЗ введен блок предполетной подготовки АРЗ, состоящий из пульта предполетной подготовки и блока контроля и записи параметров АРЗ, причем пульт предполетной подготовки АРЗ через блок контроля и записи параметров АРЗ соединен двунаправленной шиной Ml со входами микроконтроллера АРЗ; в состав РЛС введены блок декодирования пакетной телеинформации и блок вторичной обработки телеинформации и выдачи сигналов метеопараметров атмосферы, причем однонаправленная шина М2 приемопередающего устройства РЛС соединена через блок декодирования пакетной телеинформации с блоком вторичной обработки телеинформации и выдачи метеопараметров атмосферы, выход которого является выходом системы. 2 з.п. ф-лы, 4 ил.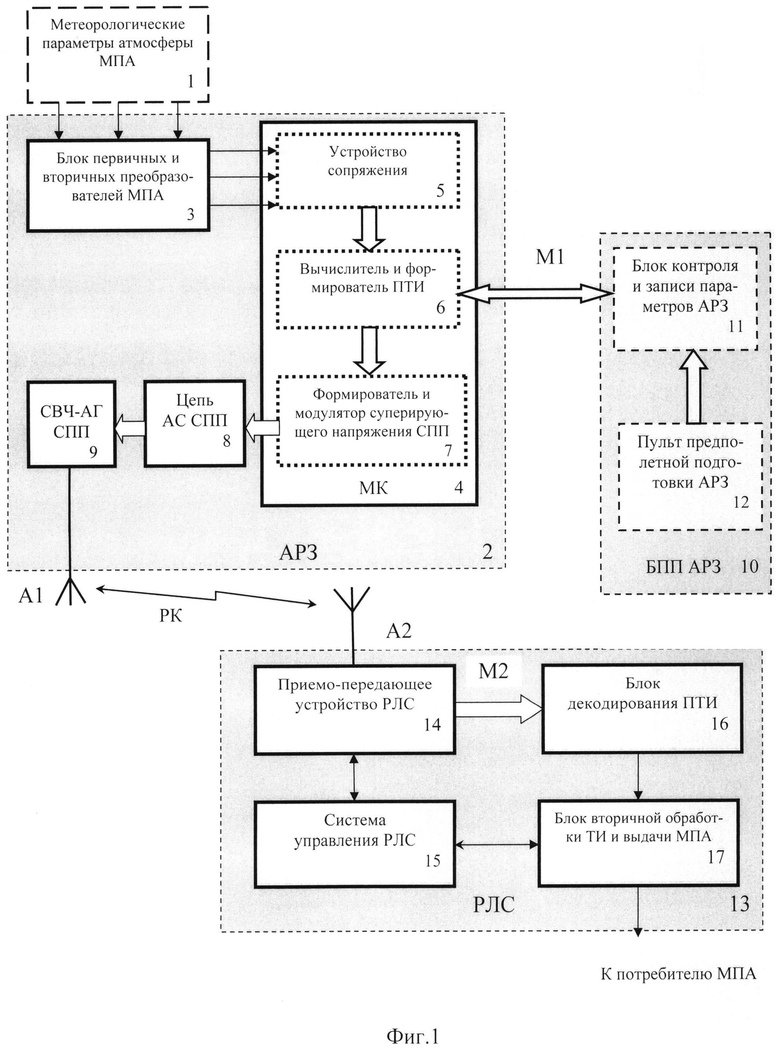
1. Система радиозондирования атмосферы с пакетной передачей информации, содержащая аэрологический радиозонд - АРЗ и базовую станцию - РЛС, отличающаяся тем, что в состав АРЗ введен блок предполетной подготовки АРЗ, состоящий из пульта предполетной подготовки и блока контроля и записи параметров АРЗ со следующими соединениями: пульт предполетной подготовки АРЗ через блок контроля и записи параметров АРЗ соединен двунаправленной шиной M1 со входами микроконтроллера АРЗ; в состав РЛС введены блок декодирования пакетной телеинформации и блок вторичной обработки телеинформации и выдачи сигналов метеопараметров атмосферы со следующими соединениями: однонаправленная шина М2 приемо-передающего устройства РЛС соединена через блок декодирования пакетной телеинформации с блоком вторичной обработки телеинформации и выдачи метеопараметров атмосферы, выход которого является выходом системы.
2. Система по п.1, отличающаяся тем, что блок предполетной подготовки выполнен отдельным конструктивом и соединен с аэрологическим радиозондом на время ввода формата пакетной информации, также по желанию заказчика может быть решен программно в микроконтроллере АРЗ.
3. Система по п.1, отличающаяся тем, что приемопередатчик аэрологического радиозонда выполнен по схеме сверхрегенератора и включает в себя последовательно соединенные: формирователь и модулятор суперирующего напряжения, цепь автосмещения и СВЧ-автогенератор, нагруженный на антенну.
| Радиозондирование атмосферы | |||
| Технические и метеорологические аспекты разработки и применения радиозондовых измерительных систем | |||
| Под ред | |||
| ИВАНОВА В.Э | |||
| Укатеринбург, УрО РАН, 2004 | |||
| Способ устранения утечек в вакуумных фотоэлектронных приборах | 1957 |
|
SU109297A1 |
| Двухтактный мостовой магнитный усилитель | 1958 |
|
SU122495A1 |
| Устройство для увеличения быстродействия и расширения полосы пропускания частот воспроизводящих систем | 1953 |
|
SU105477A1 |
| US 5379224 A, 03.01.1995 | |||
| US 20080169975 A1, 17.07.2008 | |||
| JP 2010279034 A, 09.12.2010 | |||

