Изобретение относится к скоростным водным транспортным средствам.
Известны высокоскоростные водные транспортные средства: катера, глиссеры и т.п. суда - все они имеют движители, создающие упор - силу для движения судна, и корпус судна, создающий основную силу сопротивления движению.
Максимальная скорость водоизмещающего судна стремится к пределу - при линейном увеличении мощности энергетической установки сопротивление водной среды пропорционально квадрату скорости и более.
Суда на воздушной подушке - близкий аналог предлагаемого скоростного судна. Движение корпуса судна на воздушной подушке не перемещает массы воды, преодолевает только сопротивление воздуха. Наиболее перспективные - амфибии, суда с ниспадающими с бортов ограждениями или с ограждениями, образованными сопловым способом.
Английское судно на воздушной подушке СР №4, водоизмещение 167 т ~1640 кН, четыре газовых турбины мощностью по 3130 кВт, скорость - 67 уз, удельная нагрузка - 0,131 кН/кВт. (Сайт: Судно на воздушной подушке - Википедия.) (Приложение №1.)
Судно на воздушной подушке обладает многими ценными качествами. Недостатком этих судов считается ограниченная мореходность, отсутствие методов повышения мореходности, кроме как увеличение размеров судна, а также большая парусность судна.
Также аналогом предлагаемого изобретения является высокоскоростное судно по патенту России №2163555 В63B 1/24, F02В 61/04.
А. Недостатками этого судна являются:
1) наличие гидравлического сопротивления большого количества элементов, находящихся в водной среде - фермы, стойки подводных крыльев и крылья, корпуса двигателей;
2) гидродинамическое сопротивление подводных крыльев;
3) аэродинамическое сопротивление корпуса судна, а также сопротивление корпуса воздушной среде. Сопротивления всех указанных элементов ограничивают возможности скоростного движения судна.
Б. Громоздкая общая конструкция судна.
Отметим, что величина упора - сила движителей, перемещающая судно, у некоторых скоростных судов соизмерима с их водоизмещением.
Например, высокоскоростное патрульное судно «Мустанг-99» на газовой каверне (Яndex «Мустанг-99») (Приложение №2), водоизмещение 30,8 т ~300 кН, энергетическая установка мощностью 2×1660 кВт, удельная нагрузка - 0,090 кН/кВт, движитель - ЧПГВ, скорость судна - 50 уз, сопротивление судна (величина упора) при этой скорости не меньше ~380,0 кН.
Величина упора судна в данном случае больше его водоизмещения на ~13%.
(Величина упора на швартовке: гребных винтов ~0,110-0,150 кН/кВт, у водометов на 7-12% меньше. Максимальный упор движитель ЧПГВ создает при некотором значении скорости судна.)
Катамаран полуглиссер с подводными крыльями американской фирмы Buguesbus "Petricia Olvia ||" (Журнал «Катера яхты» №174, 2003 г. Характеристики - приложение № 3), водоизмещение полное 202 т ~2000 кН, энергетическая установка общей мощностью 22250 кВт, максимальная скорость - 57 уз. Удельная нагрузка ~0,090 кН/кВт.
При скорости 57 уз сопротивление судна (или упор) не меньше ~2260 кН. Упор судна больше его водоизмещения на 13%.
В обоих случаях использовалось известное уравнение:
М=(Со Ск)/(Пп Пр),
См. Справочник ПО КАТЕРАМ ЛОДКАМ И МОТОРАМ Г.М.НОВАКА, изд. 2-е. Ленинград: СУДОСТРОЕНИЕ, 1982 г. (обозначения параметров для удобства пользования изменены).
Где:
М - мощность энергетической установки - Вт;
Со - сопротивление судна - Н;
Ск - максимальная скорость судна - м/с;
Пп - КПД механической передачи мощности на движители, величина, равная ~(0,95-0,97);
Пр - пропульсивный коэффициент - величина, зависимая от конструкции судна и сильно зависимая от его скорости, находится в пределах ~0,25-0,35 при максимальных скоростях в приведенных примерах.
Итак, у некоторых скоростных судов величина упора больше веса судна. Однако максимальные скорости существующих скоростных серийных судов не превышают 45-60 узлов.
Цель изобретения - создать судно, у которого при движении не расходуется энергия на перемещение водных масс его корпусом, минимизируется воздушное и исключается воздушное и гидродинамическое сопротивления (создание аэродинамической подъемной и гидродинамической подъемной сил), корпус судна может иметь форму, при которой возникает наименьшее сопротивление обтекания воздухом, и за счет всего этого увеличить скорость судна.
Как известно, «по принципу движения на воде различают суда плавающие (водоизмещающие), глиссирующие, на подводных крыльях и на воздушной подушке. Суда, способные погружаться для работы под водой, называются подводными, все остальные - надводными». (Рябчиков П.А. Морские суда. М., 1959 г.)
Цель изобретения достигается использованием нового принципа движения на воде - способом поднятия судна над водной поверхностью с помощью нескольких водных движителей, установленных векторами упоров вертикально вверх и создающих подъемную силу, а посредством отклонения на некоторый угол векторов упоров от вертикали - создание горизонтальной составляющей силы, которая движет судно, преодолевая корпусом сопротивление воздуха и элементами конструкций движителей - сопротивление водной среды.
Фиг.1. Общий вид судна для движения на воде на векторах упоров водных движителей.
(В дальнейшем в описании изобретения вместо фраз: «вектор/ов упор/ов водного/ных движителя/лей» используется слово «упор/ов».)
Фиг.2. Водный движитель - гребной винт с карданным механизмом для движения судна на воде на упорах. Движитель изображен схематически, с целью показа действующих сил, которые имеют место и во всех движителях, изображенных ниже.
Фиг.3. Водный движитель - гребной винт для движения судна на воде на упорах.
Фиг.4. Водный движитель - водомет с соплом в водной среде для движения судна на воде на упорах.
Фиг.5. Водный движитель - водомет с надводным соплом для движения судна на воде на упорах.
Предлагается судно для движения на воде на векторах упоров водных движителей.
Судно также может быть изготовлено путем доработки существующих судов.
Изобретение осуществимо. Его использование приведет к появлению нового вида высокоскоростных водных транспортных средств на основе способа движения на воде - движения на воде на упорах.
На фиг.1 изображено судно с четырьмя водными движителями 1, предназначенными для движения судна на воде на упорах. Судно состоит из корпуса, в котором размещены отсеки для машинного отделения, рубки управления, бака с топливом, двигателя, а также движителей и автоматической системы управления стабилизации судна. Движители установлены попарно - на носу и на корме, размещены симметрично продольной оси судна на удалении от вертикальной оси, проходящей через центр тяжести судна, и при необходимости крепятся к конструкции корпуса посредством пилонов. Векторы упоров движителей направлены вверх. Точка приложения суммарного вектора упоров расположена в районе вертикальной оси, проходящей через центр тяжести судна.
Мощность энергетической установки выбирается достаточной для создания суммарного упора движителей, превышающего вес судна на 10-25%.
Однако и при равных значениях упора и веса судна измененное кинематическое использование упора и создание швартовочных условий работы гребного винта или лопастного механизма дают возможность и в этом случае использовать принцип движения на воде на упорах.
Скорости вращения, конструкции гребных винтов и лопастных механизмов некоторых движителей соответствуют оборотам и образцам, создающим наибольший упор, например движителям портовых буксиров.
Движители имеют устройство, регулирующее высоту днища судна над поверхностью воды. При уменьшении расстояния между днищем и поверхностью воды через устройство на гребной винт или в лопастной механизм поступает вода, величина упора увеличивается, расстояние между днищем и поверхностью воды увеличивается. При увеличении расстояния между днищем и поверхностью воды на гребной винт или лопастной механизм поступает водовоздушная смесь, упор уменьшается, расстояние между днищем и поверхностью воды также уменьшается.
2 - убирающийся киль.
В корме размещен выдвигающейся руль.
Четыре движителя, каждый из которых может создать горизонтальную составляющую упора в любом горизонтальном направлении, размещение движителей и аэродинамический стабилизатор 3 обеспечивают устойчивость движения судна по курсу и его управляемость - движение во все стороны, повороты и развороты, в том числе и на месте, а также могут компенсировать аэродинамические силы, возникающие при больших скоростях от близости днища и поверхности воды.
На судне установлена система автоматического управления величиной и направлением горизонтальной составляющей упора каждого движителя. Считается, что такая система существует и установлена на судне.
Для повышения мореходности на судне установлена автоматическая система управления стабилизации судна при качке. Считается, что такая система имеется и установлена на судне. Эта система управляет устройствами уменьшения или увеличения упора движителей путем подачи воздуха или отключения подачи воздуха на гребной винт или в лопастной механизм.
Реакция вращения судна от гребных винтов, лопастных механизмов нейтрализуется их вращением в противоположные стороны.
Для защиты движителей от плавающих предметов перед каждым движителем, под углом к водной поверхности, размещены защитные ножи 4 (3-15 шт.), которые крепятся к судну или к пилону движителя.
Количество движителей и их расположение может быть иным, от двух и более, в том числе движители могут быть выносные или размещены по бортам судна. Корпус судна может быть герметичен, иметь форму сигары, треугольника, тарелки и т.п.
Предлагаемое судно - судно, в котором для движения на воде на упорах используются существующие движители (см. Лаврентьев В.М. Судовые движители. М.-Л. 1949 г., Куликов С.В., Храмкин М.Ф. Водометные движители, 2 изд. Л., 1970 г.), однако они используются иначе, чем у существующих судов.
Ввиду необычного способа применения и размещения движителей движители претерпели некоторые изменения.
Цели изменений:
- возможность установки движителя в положение, при котором вектор упора направлен вверх;
- иметь возможность управлять отклонением вектора упора;
- обеспечить наименьшее сопротивление узлов и деталей движителя, находящихся в водной среде.
При этом не изменяются конструкции гребных винтов, лопастных механизмов и сопел.
Ниже приводятся описания возможных движителей судов для «Движения на воде на упорах».
Водный движитель - гребной винт с карданным механизмом для движения на воде на упорах
Гребной винт с карданным механизмом для движения на воде на упорах, фиг.2, состоит из гребного винта 10, гребного вала 11, карданного механизма 12, приводного вала 13, водила 14, защитной шторки 15, воздушной трубы 16.
Гребной вал 11 установлен вертикально и имеет возможность отклоняться от вертикали на угол "а" с помощью водила 14 и карданного механизма 12. Считается, что карданный механизм, воспринимающий осевые нагрузки, имеется.
Гребной винт 10 обеспечивает необходимую величину упора. При увеличенном количестве лопастей винта уменьшаются вибрации, возникающие при движении судна от неодинакового обтекания встречным потоком лопастей винта.
Водилом 14 производится управление положения гребного вала 11: "вперед-назад", "влево-вправо". Курсовое движение производится при положении гребного вала "назад".
15 - гибкая водозащитная шторка.
16 - труба для подачи воздуха в лопасти гребного винта для стабилизации судна при качке. Возможный удельный упор этого движителя 0,11-0,15 кН/кВт.
Как вариант на движитель - гребной винт с карданным механизмом для движения на воде на упорах устанавливается трубка 17 для поддержания гребного винта на некоторой глубине - движитель с заглубленным гребным винтом.
Также, как вариант, вместо гребного винта 10 устанавливается двух-трехходовой винт Архимеда.
Как вариант используются соосные гребные винты противоположного направления в качестве узла 11, при этом преобразователь обратного вращения находится в узле 11.
(Сайт ЦНИИ им. А.Н.Крылова. Гидродинамика. Соосные гребные винты противоположного вращения.) (Приложение №4.)
Работа движителя и судна
При неработающих движителях судно находится на плаву как обычное водоизмещающее судно. При малых и средних оборотах приводного вала 13 судно способно двигаться и маневрировать как водоизмещающее судно.
При номинальных оборотах приводного вала 13 судно под действием упоров движителей поднимается над поверхностью водоема до выхода на поверхность верхних частей лопаток гребного винта. Если установлена трубка 17 (фиг.2), то подъем судна произойдет до выхода на поверхность верхнего конца трубки 17, через которую произойдет подсос воздуха на лопасти гребного винта, величина упора уменьшится, подъем судна прекратится, гребной винт останется на некоторой глубине.
Для курсового движения судна водилом 14 гребной вал 11 отклоняется в сторону кормы на угол "а" (фиг.2).
При отклонении гребного вала на угол "а" вектор упора "Р" также отклоняется на этот же угол и в конструкции судна на опоре "В" появляется сила "Т", равная: Р Sin а. Если угол "а" равен 20 градусам, то: Т=0,34Р, соответственно вертикальная часть упора "Г" равна: Г=0,94Р.
Величина силы, двигающей судно, составляет 1/3 от упора "Р" движителя и направлена, в основном, на преодоление судном сопротивления воздушной среды и сопротивления элементов движителя 10 водной среде.
Величина силы "Г", поддерживающей судно над поверхностью воды, при этом будет меньше начальной на 6 процентов.
Корпус судна обтекаемый, спроектирован для скоростного движения судна в воздушной среде, на преодоление сопротивления которой приходится почти ~1/3 мощности энергетической установки.
Сопротивление движению создает и движитель. Однако возможно, что у движителя без трубки 17 (незаглубленный гребной винт) водная среда окажет незначительное сопротивление движителю.
Просчитать возможную скорость судна можно только ориентировочно - испытав модель. Но очевидно, что скорость судна будет больше, чем у лучшего аналогичного по водоизмещению надводного судна с такой же мощностью энергоустановки. Ниже это показано на примерах реконструкции существующих судов.
Маневренность судна, в том числе и движение на корму и на борт, обеспечивается изменением угла "а" гребного вала 11 в необходимом направлении одного или нескольких движителей. Мореходность судна определяется высотой днища над поверхностью водоема и количеством движителей: чем выше судно над поверхностью водоема и чем больше движителей, тем лучше мореходность.
Мореходность судна повышается при использовании автоматической системы управления стабилизации судна, которая управляет подачей струи воздуха в гребной винт 10.
При движении волны на гребной винт автоматическая система управления стабилизации по воздушной трубе 16 подает струю воздуха в лопасти гребного винта 10, величина упора уменьшается, гребной винт остается, в основном, в прежней горизонтальной плоскости. При выходе из волны подача струи воздуха прекращается и горизонтальная плоскость движения гребного винта остается прежней.
В положении судна над поверхностью воды, в его основном положении, приводные валы 13 вращаются с постоянной скоростью, вне зависимости от скорости судна и его маневрирования. Скорость и маневрирование зависят только от угла "а".
Режим стабильности оборотов приводного вала 13 является наиболее благоприятным для получения максимального упора и для работы двигателя.
В скоростном потоке воды лопасти винта испытывают неравномерные нагрузки: например, пол-оборота справа по ходу судна, лопасть движется навстречу потоку, а слева по ходу судна - по потоку, вследствие этого вектор упора направлен влево под некоторым углом к оси гребного вала 11. Кроме этого вся конструкция испытывает вибрации. Перекос вектора упора исправляется отклонением гребного вала вправо (влево), для смягчения вибрации используется многолопастный винт.
При применении соосных гребных винтов противоположного направления в качестве узлов 10 и 11 проблемы вибрации и перекоса практически отсутствуют, а при применении винта Архимеда отсутствуют вибрации.
Главной задачей при выборе узлов 10 и 11 является величина их сопротивления водной среде при больших скоростях. Возможно, что наименьшее сопротивление окажет незаглубленный гребной винт.
При двух движителях на судне движители размещаются на продольной оси судна в носовой части и кормовой. Так как реакция горизонтальной составляющей вектора упора по изменению его направления практически мгновенная, то судно в положении над поверхностью водоема будет вести себя устойчиво при любой скорости. Вектор горизонтального упора с помощью автоматики необходимо направлять на борт, на который заваливается судно. Также используется аэродинамический стабилизатор.
Работа судна одинакова и с другими водными движителями.
Водный движитель - гребной винт для движения на воде на упорах
Гребной винт 20 - фиг.3 - размещен в корпусе гребного винта 21, который закреплен на пилоне 22 посредством двух силовых пластин 23. Между гребным винтом 20 и корпусом гребного винта 21 встроена подвижная профилированная насадка 24. Гребной вал 25 установлен вертикально. Конструкция и положение гребного винта соответствуют положению, при котором упор максимальный, соответствующий упору при швартовке, так как гребной вал установлен перпендикулярно и к водной поверхности и к вектору скорости судна и вращается с постоянной скоростью.
Наибольший упор имеют портовые буксиры, на которых применяются многолопастные, малооборотные гребные винты с профилирующей насадкой. К примеру, буксир «Нептун» Санкт-Петербургского порта. (Яндекс: О портовых буксирах и о работе с ними. Глава VI.) (Приложение №5.)
Мощность главных двигателей буксира «Нептун» 2000 кВт, гребные винты с насадками, тяга на гаке (упор) 45 т - 440 кН. Удельный упор равен 0,202 кН/кВт, что на 75-85% больше значения упора других судов.
В полость корпуса гребного винта 21 вода попадает самотеком и далее течет вдоль гребного вала 25 под действием сил гребного винта, это создает похожие условия работы гребного винта при швартовке.
На входе водного потока в корпус гребного винта 21 установлены направляющие пластины.
Управление наклоном вектора упора производится изменением положения профилированной насадки 24 с помощью тяг 26. При наклоне профилированной насадки в сторону кормы вектор скорости водного потока от гребного винта отклонится на угол "а", соответственно отклонится и вектор упора движителя в сторону носа судна, появится горизонтальная составляющая вектора упора.
Горизонтальная составляющая вектора упора передается профилированной насадкой на корпус гребного винта 21, далее на силовые пластины 23, пилон 22 и на корпус судна.
Трубка 27 обеспечивает устойчивое подводное положение гребного винта 20 и постоянное расстояние между днищем судна и водной поверхностью. При увеличении этого расстояния через трубку поступает вода, упор увеличивается, расстояние уменьшается до момента подсоса воздуха через трубку 27 в область гребного винта.
Для изменения расстояния между судном и поверхностью водоема трубка 27 изготавливается раздвижной, управляемой с судна.
У движителя гребной винт 20 и профилированная насадка 24 закрыты от набегающего водного потока обтекателем 28, вода на гребной винт поступает по оси винта. Гребной винт 20 работает без прямого влияния набегающего потока и создаются условия, позволяющие получить максимальное значение упора.
Для стабилизации судна при волнении и для повышения мореходности к гребному винту по воздушной трубе 29 подается воздух. Подача воздуха к гребным винтам производится командой от автоматической системы управления стабилизации судна. Считается, что такая система существует и на судне установлена.
При движении волны на гребной винт 20 по команде автоматической системы управления стабилизации судна по воздушной трубе 29 подается струя воздуха, упор гребного винта 20 уменьшается, гребной винт остается, в основном, в прежней горизонтальной плоскости. При прохождении волны подача воздуха по воздушной трубе 29 прекращается, упор гребного винта 20 повышается, гребной винт остается в прежней горизонтальной плоскости.
Сопротивление движителей - основное препятствие для получения скоростей судна 70-100 уз.
Для уменьшения трения движителя в водной среде обтекатель 28 выполнен двухслойным. Наружный слой обтекателя выполнен с отверстиями. В пространство между слоями обтекателя подается воздух.
Величина сопротивления движителя зависит от гребного винта, так как габариты движителя определяются его диаметром.
С одной стороны, чем больше гребной винт, тем больше упор при меньших оборотах гребного вала, с другой - большее сопротивление движителя.
Однако так как количество движителей на судне, как правило, четыре и больше, то существует оптимальный вариант выбора диаметра гребного винта с необходимой величиной упора при наименьшем сопротивлении движителя.
Величина удельного упора этого движителя ~0,130-0,180 кН/кВт.
Возможно, что этот вид движителя найдет применение на больших грузопассажирских судах.
Водный движитель - гребной винт для движения на воде на упорах может быть дооборудован реверсной заслонкой, с помощью которой струя воды направляется под некоторым углом вверх, возникает упор, направленный вниз, и подготовленное для подводного плавания судно с запасом плавучести ~40% способно погружаться на некоторую глубину. (Реверсивная заслонка, см., например, Справочник ПО КАТЕРАМ ЛОДКАМ И МОТОРАМ Г.М.НОВАКА, изд. 2-е. Ленинград: СУДОСТРОЕНИЕ, 1982 г.)
Водный движитель - водомет с соплом в водной среде для движения на воде на упорах
Водометная труба 30, фиг.4, с водозаборником с решеткой 31, установленной в вертикальной плоскости, имеет вид прямоугольной трубы со спрофилированной нижней стороной 32. Нижняя сторона 32 спрофилирована для монтажа корпуса лопастного механизма 33 с лопастным механизмом 34 и соплом 35, закрытых при этом от прямого потока воды водозаборником с решеткой 31.
Водометная труба 30 подсоединена к корпусу лопастного механизма 33 и к выпускному устройству 36 с подвижной шторкой 37. Между корпусом лопастного механизма 33 и лопастным механизмом 34 установлено подвижное сопло 35 со спрямляющими лопатками и управляемое тягами 38. Вал 39 лопастного механизма установлен вертикально. На входе водного потока лопастного механизма установлен направляющий аппарат.
Режим работы пары: двигатель - лопастной механизм, стабилен, и параметры этой пары могут быть подобраны в режим для достижения максимального значения упора. Например, в режиме буксира с водометным движителем: небольшие обороты увеличенного в диаметре лопастного механизма, прокачка большой массы воды.
Для уменьшения лобового сопротивления водомета лопастной механизм 34 работает в режиме засасывания воды через решетку 31.
Проточная площадь решетки 31 меньше в полтора-два раза проточной площади лопастного механизма, и скорость движения воды через решетку водозаборника больше, чем через лопастной механизм.
В этом случае водозаборник с решеткой 31 не будет оказывать существенного сопротивления водной среде до момента превышения скорости судна над скоростью движения воды через решетку водозаборника.
Если, например, скорость движения воды через лопастной механизм равна 15 м/с, то через решетку водозаборника вдвое меньшей площадью скорость движения воды будет 30 м/с, что соответствует скорости судна ~59 уз.
При дальнейшем увеличении скорости судна появится постепенно возрастающее гидравлическое сопротивление водозаборника с решеткой 31. Постепенность определяется тем, что при определенном давлении в водометной трубе приоткроется шторка 37 выпускного устройства 36, с помощью которой стабилизируется давление в водометной трубе, соответственно и величина сопротивления водозаборника. Это сопротивление в сумме с сопротивлением трения обтекателя и трением, возникающим при завихрениях от элементов конструкций водомета, и определит основную силу сопротивления водометов данной конструкции при высоких скоростях судна.
40 и 41 - подвижная и неподвижная овальные трубки механизма регулирования и стабилизации высоты днища судна над поверхностью воды. При уменьшении высоты днища над водной поверхностью открытый конец трубки 40 оказывается в воде и в зону лопастного механизма через трубки 40 и 41 и открытый клапан 47 по воздушной трубе 48 поступает вода, упор водомета увеличивается, днище поднимается до момента, когда через трубки 40, 41 и воздушную трубу 48 начинает поступать водовоздушная смесь, при этом упор уменьшается, происходит стабилизация судна по вертикали вокруг некоторого значения, в идеальном случае в диапазоне вертикального размера среза «а» трубки 40.
Для увеличения расстояния между днищем и водной поверхностью с помощью тяги 42 трубка 40 опускается на некоторое значение «к», по трубкам 40 и 41 по воздушной трубе 48 поступает вода, упор увеличивается до тех пор, пока через трубку 40 и 41 в воздушную трубу 48 не начнет поступать водовоздушная смесь, расстояние между днищем и водной поверхностью увеличится на величину «к», судно стабилизируется на новой высоте.
Во избежание накопления воздуха в верхней части водометной трубы установлен ниппель 43, через который удаляется воздух.
Пилон 44 и водомет соединены между собой крепежными силовыми пластинами 45. Силовые пластины 45 симметричны между собой, и между ними происходит свободный ток набегающей воды.
46 - обтекатель водомета.
Для уменьшения качки на судне установлена автоматическая система управления стабилизации судна, которая управляет перекидным клапаном 47. Считается, что такая система существует и установлена на судне. При движении волны на водомет срабатывает автоматическая система управления стабилизации судна, клапан 47 открывает воздушную трубу 48, одновременно закрывает трубку 41 и воздух по воздушной трубе 48 от судна поступает в область лопастного механизма 34, величина упора понижается и водомет остается, в основном, на прежнем горизонтальном уровне.
После прохождения вершины волны клапан 47 закрывает трубу 48 и открывает трубку 41, через которую поступает вода, упор водомета увеличивается, водомет остается, в основном, на том же горизонтальном уровне, соответственно уменьшается качка судна.
Труба 48, вал 39 и тяга 38 закрыты овальным обтекателем 49.
Для уменьшения трения обтекатель 46 выполнен двухслойным с продувом воздуха между слоями, который выходит через отверстия наружного слоя обтекателя. Возможная величина удельного упора этого движителя ~0,130-0,180 кН/кВт.
Водометный движитель с соплом в водной среде может быть оборудован реверсивной заслонкой.
Водометный движитель с соплом в водной среде для движения на воде на упорах, оборудованный реверсивной заслонкой, позволяющей при необходимости водную струю сопла направить под некоторым углом вверх и создать силу - часть упора, направленную вертикально вниз. Судно с этими водометными движителями, с герметичным корпусом, соответственно дооборудованное, с запасом плавучести ~40% может совершить погружение на некоторую глубину для маневра или же для преодоления пространства с волнением водной поверхности.
Водный движитель - водомет с надводным соплом для движения на воде на упорах
Входная часть водометной трубы 50 выполнена в виде черпака 51 с наклоном к водной поверхности на угол 50-70 градусов и прикрыта защитной решеткой 53. 54 - подвижное сопло со спрямляющими лопатками. 55 - лопастной механизм. Корпус лопастного механизма 56 прикреплен к водометной трубе 50. Водометная труба 50 крепится к пилону 57. Сопло 54 находится выше по вертикали верхнего края защитной решетки 53 на расстоянии 2-5 диаметра сопла. Перед лопастным механизмом установлен направляющий аппарат.
Механизм, состоящий из подвижной трубки 58, трубки 59 и тяг 60, является регулирующим механизмом расстояния днища судна над водной поверхностью. При опускании трубки 58 по трубкам 58 и 59 через открытый клапан 65 в водометную трубу 50 вместо водовоздушной смеси поступает вода, величина упора повышается, судно поднимается до момента, когда вместе с водой по трубкам 58 и 59 начнет поступать воздух, величина упора уменьшается, положение судна стабилизируется на новой высоте.
При больших скоростях судна давление в водометной трубе 50 повышается, повышается и гидравлическое сопротивление водомета.
Для уменьшения сопротивления водомета пропускная площадь воды решетки 53 меньше пропускной площади лопастного механизма в 1,5-2,0 раза, а объем водометной трубы достаточен для уменьшения скорости движения воды в ней в 5-15 раз по сравнению со скоростью движения воды через лопаточный механизм. Этим создаются швартовочные условия работы лопастного механизма и уменьшение сопротивления водной среде входного отверстия водометной трубы до момента выравнивания скорости судна скорости движения воды через решетку 53.
Также для уменьшения сопротивления установлен механизм сброса избыточного давления: подпружиненный пружиной 61 клапан 62 открывается при некотором давлении в водометной трубе 50, происходит сброс воды и воздуха.
Для уменьшения качки на судне используется автоматическая система управления стабилизации судна, которая управляет перекидным клапаном 65. Считается, что такая система существует и установлена на судне. При движении волны на водомет срабатывает автоматическая система управления стабилизации судна, клапан 65 закрывает трубку 59 и открывает воздушную трубу 66 и воздух от судна по этой трубе поступает в область лопастного механизма 55, величина упора понижается и водомет остается, в основном, на прежнем горизонтальном уровне.
После прохождения волны клапан 65 закрывает трубу 66 и открывает трубку 59, упор водомета увеличивается, водомет остается, в основном, на том же горизонтальном уровне, соответственно уменьшается качка судна.
67 - вал лопастного механизма, установлен вертикально.
68 - воздушный обтекатель.
69 - тяга управления соплом.
Возможная величина удельного упора движителя - 0,130-0,180 кН/кВт, так как лопастной механизм работает в режиме, приближенном к швартовочному режиму портового буксира.
На движитель - водомет с надводным соплом для движения на воде на упорах, может быть установлена реверсивная заслонка для направления струи сопла под углом вверх. Возникший упор, направленный вниз, позволит специально оборудованному судну с запасом плавучести ~40% погрузиться на некоторую глубину.
И хотя этот движитель утяжелен водой в водометной трубе и подъем воды на величину, равную расстоянию от среза сопла 54 до середины решетки 53, требует дополнительной энергии, именно этот движитель позволит создать наибольшие скорости большегрузных судов.
Какой движитель лучше подойдет к судну определенного класса, может показать проба моделей.
Кажущаяся на первый взгляд неэкономичность движителей: гидравлические потери, регулировки величины упоров с помощью подачи воздуха на гребные винты и в лопастные механизмы, утяжеление судна и т.п., является кажущейся. "Лишняя" трата энергии идет на реализацию способа движения на воде на векторах упоров водных движителей, при этом растет скорость судна и повышается его экономичность.
Нижеприведенные примеры убеждают в правильности этого утверждения. Произведем реконструкцию существующих судов.
Катер «Амур-3 (удлиненный)»
(http://katera1.narod.ru/toorbina2.html) (Приложение №6).
Все расчеты ориентировочные, без учета возможных влияний нахождения гребного винта в частично погруженном состоянии (ЧПВ), только для качественного определения отличия от существующих образцов.
Водоизмещение катера полное - 12,7 кН, мощность двигателя - 165 кВт, движитель - водомет, число оборотов гребного вала - 5000 об/мин, скорость - 41,3 уз, удельная нагрузка - 0,070 кН/кВт. Сопротивление судна (упор) при скорости 41,3 уз равен порядка 20,0 кН.
Взамен водомета устанавливаются три гребных винта с карданным механизмом для движения на воде на упорах (фиг.2): два по бортам в носовой части катера, один - в кормовой. Передача мощности от двигателя на движители осуществляется валоприводами. Каждый движитель мощностью 55,0 кВт, диаметр гребного винта 0,250-0,350 м, скорость вращения гребного вала ~5000 об/мин с удельным упором на швартовке минимум 0,11-0,13 кН/кВт. Ожидаемое увеличение веса на 2,5-3,5 кН, и общий вес катера станет равным - 15,7 кН.
Упор на один движитель ~6,60 кН, общий упор реконструированного катера в рабочем режиме равен ~19,7 кН.
Для ориентировочной оценки эффективности реконструкции катера положим, что нереконструированный катер достиг скорости 41,3 уз и далее оказался над поверхностью водоема при этой скорости.
Общее сопротивления корпуса катера, находящегося только в воздушной среде при скорости 41,3 уз, уменьшится минимум в три-четыре раза, что реально, и станет равным: 20,0/3,5=5,70 кН плюс сопротивление движителей, а именно сопротивление некоторой части гребного вала и защитных ножей (фиг.1,2) на каждом движителе.
Сопротивление каждого движителя с защитными ножами находится в пределах ~0,50-0,70 кН, трех движителей ~1,80 кН.
В положении реконструированного катера над поверхностью водоема и при отклонении гребных валов на 30 градусов величина общего горизонтального упора равна ~10,0 кН, вертикального ~17,0 кН.
Итого, при скорости 41,3 уз, общее сопротивление реконструированного катера будет равно ~7,50 кН (5,70 кН + 1,80 кН = 7,50 кН), при величине общего горизонтального упора, равной ~10,0 кН.
Под действием упора ~2,50 кН (10,0 кН - 7,50 кН=2,50 кН) скорость катера будет увеличиваться.
Ускорение катера (с исходной скорости - 41,3 уз) будет продолжаться до момента равенства горизонтальной составляющей общего упора общему сопротивлению катера.
Вероятная максимальная скорость катера будет в 1,2-1,3 раза больше исходной, экономичность катера повысится.
Второй вариант реконструкции судна с использованием движителей для движения на воде на упорах. Все расчеты ориентировочные, для определения качественных характеристик реконструированного судна.
Высокоскоростное патрульное судно «Мустанг-99», проект 18629.
Водоизмещение ~300 кН, энергетическая установка: 2 двигателя TBD616V16, каждый мощностью 1660 кВт, удельная нагрузка ~0,090 кН/кВт, максимальная скорость 50 уз.
Устанавливаются четыре водных движителя - водометы с надводным соплом для движения на воде на упорах (фиг.5).
Устанавливается автоматическая система стабилизации судна. Убираются движители, лишние агрегаты, узлы и детали, установленные для управления и увеличения скорости судна, итого минус 35,0-45,0 кН.
Вес судна увеличится на 140,0-160,0 кН (~15,0 кН «сухой» один движитель плюс ~35,0 кН воды и минус вес снятых агрегатов), станет равным ~410 кН, удельная нагрузка ~0,123 кН/кВт.
Движители мощностью 835 кВт, развивающие удельный упор, соответствующий удельному упору портового буксира - 0,150 кН/кВт. Величина упора каждого установленного движителя ~125 кН, суммарная величина упора ~500 кН.
В номинальном режиме движения реконструированного судна над поверхностью водоема сопротивление движению оказывают воздушная среда - корпусу судна и вода - движителям. Сопротивление движителей создается участками А-А (см. фиг.5), которые выполнены в форме наименьшего сопротивления водной среде, и их суммарная площадь составит не более 3-7% от площади смачиваемой поверхности нереконструированного судна.
При отклонении сопла 54 (фиг.5) на 30 градусов горизонтальная составляющая упора равна ~250 кН, вертикальная ~435 кН.
Определить возможную скорость реконструированного судна возможно ориентировочно на модели.
Однако очевидно, что общее сопротивление реконструированного судна меньше, чем у нереконструированного и скорость судна будет больше прежней.
При скорости судна 50 уз до реконструкции общая сила сопротивления нереконструированного судна равна ~380 кН.
Если полагать, что сила сопротивления всего корпуса судна, оказавшегося при скорости 50 уз в воздушной среде, уменьшилась в 2,5-3,5 раза, что реально, то при этой скорости на преодоление силы общего сопротивления реконструированного судна, меньшей в 3,0 раза и равной ~125 кН, приходится упор (горизонтальная составляющая упора), равный - 250 кН, то есть на 125,0 кН больше величины общей силы сопротивления реконструированного судна.
К общей силе сопротивления - корпуса воздушной среде, прибавится сопротивление движителей как воздушной среде, так и водной, а также и защитных ножей. Сопротивление каждого движителя и его ножей при скорости 50 уз составит 10,0-15,0 кН, четырех: 40,0-60,0 кН, порядка 12-17% от общего сопротивления судна до реконструкции. Итого величина горизонтальной составляющей упора реконструированного судна при скорости 50 уз равна: 75,0 кН (125 кН - 50 кН = 75,0 кН).
Под действием горизонтальной составляющей упора, 75,0 кН, скорость судна будет возрастать, сопротивление тоже увеличиваться и в дальнейшем общее сопротивление судна сравняется с величиной горизонтальной составляющей общего упора, это и будет максимум возможной скорости реконструированного судна.
Авторы предполагают, что скорость реконструированного судна будет в 1,2-1,4 раза больше, чем она была до реконструкции. Повысится экономичность судна, соответственно снизится расход топлива.
Однако полные преимущества предложенного принципа движения на воде на упорах водных движителей проявляются на специально построенном судне.
Проработанные конструктивно движители с наименьшим сопротивлением водной среды, аэрообтекаемый корпус судна, автоматическое управление движителями и автоматическая система управления стабилизации судна приведут к выводу о необходимости использования способа движения на воде на упорах для создания высокоскоростных судов.
Прямое увеличение энерговооруженности судна для увеличения скорости исчерпало себя. Каждая прибавка скорости на один узел при скоростях 35-45 узлов энергетически обходится в 10-20 раз больше, чем при малых и средних скоростях.
Предложен способ движения судна - движение на воде на векторах упоров, с измененной кинематикой использования упора. При этом судно приобретает совершенно новые свойства движения на воде и новые характеристики, при больших скоростях экономичнее существующих скоростных судов, маневреннее и комфортнее, позволяет иметь любую форму судна.
Судно с водным движителем - водометом для движения на воде на упорах с установленной реверсивной заслонкой и дополнительным оборудованием обладает способностью быстро погрузиться ниже поверхности водоема на глубину 3-15 метров для длительного или кратковременного подводного плавания.
Судно, изготовленное в виде тарелки или другой подходящей формы, может быть использовано как учебное или аттракционное: судно может вращаться с большими угловыми скоростями, имитировать любую качку, двигаться с большими скоростями в любую сторону и крутыми виражами, совершить подводное плавание и пр.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭКРАНОПЛАН С ВОДОМЁТНЫМ ДВИЖИТЕЛЕМ | 2015 |
|
RU2582505C1 |
| СУДОВОЙ ВОДОМЕТНЫЙ ДВИЖИТЕЛЬ | 2001 |
|
RU2178368C1 |
| Судно на подводном крыле | 2021 |
|
RU2770253C1 |
| СУДОВОЙ ДВИЖИТЕЛЬ | 2013 |
|
RU2537988C2 |
| УНИВЕРСАЛЬНЫЙ СУДОВОЙ ДВИЖИТЕЛЬ ПОВЫШЕННОЙ ЗАЩИЩЕННОСТИ | 2013 |
|
RU2523862C1 |
| БЫСТРОХОДНОЕ СУДНО | 2015 |
|
RU2610754C2 |
| МЕЛКОСИДЯЩЕЕ СУДНО С ЛОПАСТНЫМИ КОЛЁСАМИ | 2016 |
|
RU2624375C1 |
| СПОСОБ СНИЖЕНИЯ ГИДРОДИНАМИЧЕСКОГО СОПРОТИВЛЕНИЯ ДВИЖЕНИЮ СУДНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2017 |
|
RU2653664C1 |
| СУДНО С ЧАСТИЧНОЙ МАССОЙ ГЛИССИРОВАНИЯ | 2013 |
|
RU2550783C1 |
| СКОРОСТНОЕ ГЛИССИРУЮЩЕЕ СУДНО | 2008 |
|
RU2387569C2 |
Изобретение относится к скоростным водным транспортным средствам. Способ движения судна на воде заключается в поднятии судна над поверхностью водоема и его перемещении с помощью водных движителей, которые изготовлены и установлены на судне таким образом, что векторы упоров движителей направлены по вертикали вверх и имеют возможность отклоняться от вертикали. Скоростное судно для движения на воде на векторах упоров водных движителей выполнено в трех вариантах. Судно содержит корпус, аэродинамический стабилизатор, убирающиеся киль и руль, отсеки машинного отделения, рубку, бак с топливом, двигатель, систему автоматического управления стабилизации судна при качке, воздушную трубу. По первому варианту судно отличается тем, что на судне установлены два и более гребных винта, каждый с карданным механизмом, прикрепленных к корпусу, днищу или бортам судна упорами вертикально вверх и установленных так, что точка приложения суммарного вектора упора находится на вертикальной оси центра тяжести судна. По второму варианту судно отличается тем, что на нем установлены два и более движителя в виде водомета с соплом в водной среде. Движитель состоит из водометной трубы, водозаборника с решеткой, вала с лопастным механизмом, установленным вертикально, подвижного сопла со спрямляющими лопатками, размещенного в водометной трубе, имеющей вид прямоугольного короба. Полость водометной трубы соединена с поверхностью водоема через подвижную трубку, входящую в неподвижную, с помощью которых устанавливается расстояние между днищем судна и водной поверхностью. По третьему варианту судно отличается тем, что каждый движитель выполнен в виде водомета с надводным соплом. Достигается движение на больших скоростях, экономичность, маневренность, комфортность. 4 н. и 7 з.п. ф-лы, 5 ил.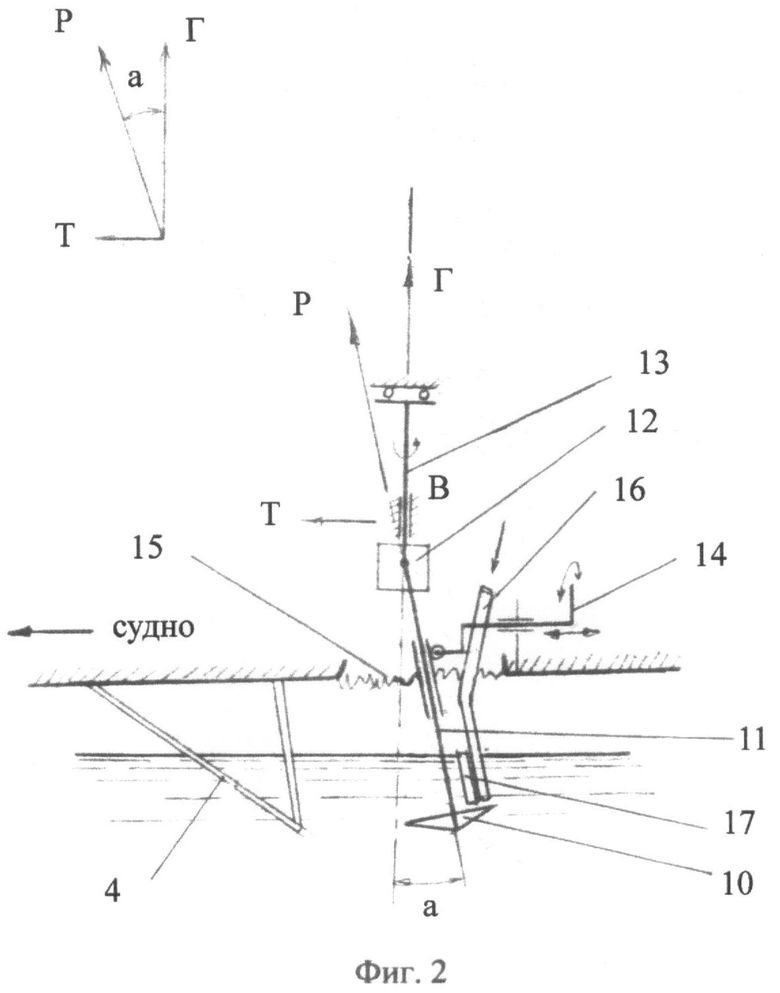
1. Способ движения судна на воде, заключающийся в поднятии судна над поверхностью водоема и его перемещении с помощью водных движителей, изготовленных и установленных на судне таким образом, чтобы векторы упоров движителей были направлены по вертикали вверх и имели возможность, при необходимости, отклоняться от вертикали.
2. Скоростное судно для движения на воде способом по п.1, состоящее из корпуса аэрообтекаемой формы, аэродинамического стабилизатора, убирающихся киля и руля, отсеков для машинного отделения, рубки управления, бака с топливом, двигателя, системы автоматического управления стабилизации судна при качке, воздушной трубы, отличающееся тем, что на судне установлены два и более водных движителя - гребных винта, каждый с карданным механизмом для движения судна на воде над водной поверхностью и прикрепленных к корпусу или к днищу судна, или к его бортам, упорами вертикально вверх и на достаточном удалении от вертикальной оси, проходящей через центр тяжести судна для устойчивого положения судна над водной поверхностью и установленных таким образом, что точка приложения суммарного вектора упора находится на вертикальной оси центра тяжести судна, гребной вал с гребным винтом каждого движителя подсоединен к карданному механизму с приводом от двигателя, отклонение от вертикали гребного вала производится водилом, шарнирно подсоединенным к гребному валу, а исполнительным механизмом системы автоматического управления стабилизации судна при качке является механизм уменьшения или увеличения вектора упора с помощью подачи или прекращения подачи воздуха по воздушной трубе в лопасти гребных винтов.
3. Судно по п.2, отличающееся тем, что гребные винты выполнены соосными противоположного вращения.
4. Судно по п.2, отличающееся тем, что гребные винты выполнены в виде двух или трехходового винта Архимеда.
5. Судно по п.2, отличающееся тем, что к воздушной трубе каждого движителя прикреплена раздвижная трубка, управляемая с судна, один торец которой находится у гребного винта, другой - в области водной поверхности, с помощью которой гребной винт погружен на некоторую глубину от поверхности водоема.
6. Судно по п.2, отличающееся тем, что каждый водный движитель для движения на воде на векторах упоров состоит из гребного винта с гребным валом, установленным по вертикали, корпуса гребного винта, подвижной профилированной насадки, размещенной между гребным винтом и его корпусом и управляемой тягами, корпус гребного винта прикреплен силовыми пластинами к пилону судна, корпус гребного винта и подвижная насадка закрыты обтекателем с двойными стенками, наружная стенка имеет отверстия, через которые выходит воздух, подаваемый с судна.
7. Судно по п.6, отличающееся тем, что каждый водный движитель оборудован реверсивной заслонкой для создания составляющей упора, направленной вниз.
8. Скоростное судно для движения на воде способом по п.1, состоящее из корпуса аэрообтекаемой формы, аэродинамического стабилизатора, убирающихся киля и руля, отсеков для машинного отделения, рубки управления, бака с топливом, двигателя, системы автоматического управления стабилизации судна при качке, воздушной трубы, отличающееся тем, что на судне установлены два и более водных движителя, причем каждый водный движитель выполнен в виде водомета с соплом в водной среде и состоит из водометной трубы, водозаборника с решеткой, лопастного механизма с валом, корпуса лопастного механизма, подвижного сопла со спрямляющими лопатками, подвижной и неподвижной трубок, обтекателя с двойными стенками с отверстиями в наружной стенке, ниппеля, пилона, вала с лопастным механизмом, установленным вертикально, плоскость решетки размещена в вертикальной плоскости и ее проточная площадь меньше в 1,5-2,0 раза проточной площади лопастного механизма, водометная труба имеет вид прямоугольного короба с изогнутой нижней стенкой для размещения в образовавшемся пространстве подвижного сопла со спрямляющими лопатками, и корпуса лопастного механизма, прикрепленного к изогнутой нижней стенке, задней стенкой водомета является выпускное устройство водометной трубы с подпружиненной шторкой, на верхней стенке водометной трубы установлен ниппель, полость водометной трубы соединена с поверхностью водоема через подвижную трубку, входящую в неподвижную трубку, с помощью которых устанавливается определенное расстояние между днищем судна и водной поверхностью, в соединении неподвижной трубки и воздушной трубы, соединяющей область лопастного механизма с системой автоматического управления стабилизации судна, помещен клапан, являющийся исполнительным механизмом системы автоматического управления стабилизации судна, и подающий или не подающий воздух в область лопастного механизма, водометная труба подсоединена к пилону двумя силовыми пластинами, соединяющими боковые стенки водометной трубы с боковыми стенками пилона; водометная труба, корпус лопастного механизма, подвижное сопло со спрямляющими лопатками закрыты обтекателем, в двойные стенки которого поступает воздух, выходящий через отверстия наружной стенки.
9. Судно по п.8, отличающееся тем, что каждый водный движитель оборудован реверсивной заслонкой для создания составляющей упора, направленной вниз.
10. Скоростное судно для движения на воде способом по п.1, состоящее из корпуса аэрообтекаемой формы, аэродинамического стабилизатора, убирающихся киля и руля, отсеков для машинного отделения, рубки управления, бака с топливом, двигателя, системы автоматического управления стабилизации судна при качке, воздушной трубы, отличающееся тем, что каждый водный движитель выполнен в виде водомета с надводным соплом для движения судна на воде на упорах и состоит из водометной трубы, лопастного механизма с валом, корпуса лопастного механизма, подсоединенного силовыми пластинами к пилону судна, подвижного сопла со спрямляющими лопатками, воздушной трубы, соединяющей область лопастного механизма с системой автоматического управления стабилизации судна при качке, водозаборняка с защитной решеткой, изготовленного в виде черпака, входная часть водометной трубы выполнена наклонно к водной поверхности под острым углом навстречу движения судна, равным 50-70° и проточная площадь водозаборника с защитной решеткой в 1,5-2,0 раза меньше проточной площади лопастного механизма, полость водометной трубы соединена с поверхностью водоема неподвижной и подвижной трубками, с помощью которых устанавливается определенное расстояние между днищем судна и водной поверхностью, неподвижная трубка подсоединена к воздушной трубе, в стыке соединения неподвижной трубки с воздушной трубой установлен клапан, являющийся исполнительным механизмом системы автоматического управления стабилизации судна при качке - подающим или не подающим воздух в область лопастного механизма, в верхней части водометной трубы имеется подпружиненный клапан, открывающийся при определенном давлении в водометной трубе, сопло со спрямляющими лопатками находится выше горизонтальной плоскости, проходящей через верхний край водозаборной решетки на 2-5 диаметра сопла, воздушный обтекатель размещен впереди и с боков верхней части водометной трубы, а объем полости водометной трубы имеет размер, при котором скорость течения воды в области лопастного механизма уменьшается в 5-15 раз по сравнению со скоростью воды в проточной части водозаборника.
11. Судно по п.10, отличающееся тем, что каждый водный движитель оборудован реверсивной заслонкой для создания составляющей упора, направленной вниз.
| ВЫСОКОСКОРОСТНОЕ СУДНО | 2000 |
|
RU2163555C1 |
| RU 94026132 A1, 27.08.1996 | |||
| СПОСОБ ЗАЩИТЫ ТЯГОВОГО КАНАТА ЭКСКАВАТОРА-ДРАГЛАЙНА ОТ КРИТИЧЕСКИХ НАГРУЗОК И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ЗАЩИТА О'АЛЕКС,А) | 1994 |
|
RU2082855C1 |
| Устройство для управления бортовыми бесступенчатыми коробками передач гусеничной машины | 1972 |
|
SU448981A1 |

