Изобретение относится к области метрологии, а именно к способу определения гравитационной постоянной вакуумированными крутильными весами.
Известен способ определения гравитационной постоянной [1] (а.с. №492837, G01V 7/00, 1974 г.). Способ заключается в том, что притягивающую массу юстируют в азимутальном направлении в двух или нескольких позициях, измеряют на всех позициях периоды, амплитуды колебаний весов и приращение расстояния от первоначальной точки, составляя систему уравнений, рассчитывают расстояния между взаимодействующими массами и гравитационную постоянную. Юстировку притягивающей массы в вертикальном направлении проводят либо визуально до герметизации вакуумной камеры, либо по максимальному уменьшению периода колебаний. Если весы расположены в стеклянной камере, настройку по вертикали проще всего проводить визуально. Способ позволял осуществлять измерения с одной притягивающей массой. Такой вариант назывался однотактной схемой. При наличии симметрично расположенных двух равных притягивающих масс схему измерений называли двухтактной.
Недостаток такого способа заключается в том, что периоды колебаний весов, соответствующие различным позициям притягивающей массы, отклоняются от нормального значения из-за низкочастотного дрейфа положения равновесия и периода колебаний весов, обусловленного, прежде всего, влиянием микросейсм, амплитудные и частотные характеристики которых изменяются во времени. Дрейф вызывают и температурные флуктуации, однако влияние последних ослабляют термостатированием весов. Практически невозможно полностью избавиться от дестабилизирующего влияния микросейсм. Выбор оптимального соотношения геометрических параметров весов, гашение качаний магнитным демпфером, проведение измерений в ночное время и прочие меры лишь частично устраняют их влияние. Искажение периодов колебаний весов микросейсмами приводит к смещению значения гравитационной постоянной.
Наиболее близким по своей технической сущности к заявляемому объекту является метод измерения гравитационной постоянной [2] (Карагиоз О.В., Измайлов В.П., Агафонов Н.И., Кочерян Э.Г., Тараканов Ю.А. Об определении гравитационной постоянной вакуумированными крутильными весами. Изв. АН СССР, Физика Земли, №5, 1976, с.106-111), в котором измеряются периоды и амплитуды колебаний крутильных весов при размещении притягивающей массы на всех установочных отверстиях узла фиксации, расположенного на линии равновесия весов. Используют систему измерения периода и амплитуды колебаний, оптически связанную с зеркалом, укрепленным на рабочем теле весов, состоящем из коромысла и двух сосредоточенных масс на его концах и подвешенном на металлической упругой нити. Шаровую притягивающую массу размещают на линии равновесия весов на одном из установочных отверстий неподвижной линейки узла фиксации на различных расстояниях от грузов коромысла.
Недостаток такого способа заключается в том, что перемещение шаровой массы из одного установочного отверстия на другое осуществляется оператором вручную, что приводит к ухудшению стабильности работы весов вследствие нарушения установившегося теплового режима и затрудняет проведение длительных непрерывных измерений. Он не предусматривает автоматизацию процесса перемещения шаровой притягивающей массы, что уменьшает производительность и увеличивает погрешность измерений.
Технической задачей изобретения является уменьшение погрешности измерений гравитационной постоянной за счет ослабления дестабилизирующих факторов, связанных с микросейсмами, неравновесными потоками разреженного газа и присутствием оператора при выборе следующей позиции.
Поставленная задача достигается тем, что притягивающие массы юстируют по сохранению положения равновесия на двух позициях, которые расположены на линии, перпендикулярной коромыслу весов в положении равновесия. Первая позиция размещается в непосредственной близости от грузов коромысла. Вторая смещается на расстояние, при котором достигается максимум периода колебаний. Притягивающие массы перемещают двумя узлами циклически в обоих направлениях, изменяя его на противоположное после каждого измерения. Способ предусматривает измерения только с двумя равными по величине шаровыми притягивающими массами, что обеспечивает сохранение положения равновесия весов.
Циклическое перемещение притягивающих шаровых масс в обоих направлениях способствует уменьшению погрешностей, обусловленных воздействием микросейсм на точку подвеса крутильных весов. Разность периодов колебаний при измерениях на выбранных позициях превосходит аналогичную разность при перемещении притягивающих масс вдоль линии равновесия весов. При этом шаровые массы переносят на более короткие расстояния, что упрощает работу узлов перемещения и фиксации. Двухпозиционная схема способствует получению максимального количества циклов за одно и то же время измерений.
Способ поясняется фиг.1-2, где 1 - корпус вакуумной камеры, 2 - вспомогательная нить, 3 - бесконтактный магнитный подшипник, 4 - магнитный демпфер, 5 - крутильная нить весов, 6 - коромысло весов, 7 - шаровые грузы коромысла, 8 - отражающее зеркало весов, 9 - шаровые притягивающие массы, 10 - узлы для перемещения и фиксации шаровых притягивающих масс, 11 - платформа для крепления установки, 12 - источник света, 13 - фотоприемники, 14 - компаратор, 15 - компьютер, θ - угол между направлением притягивающей массы на ось вращения весов и линией равновесия коромысла.
Способ измерения реализован следующим образом. Внутри вакуумной камеры 1 размещают крутильные весы, в которых на вспомогательной нити 2 крепится бесконтактный магнитный подшипник 3, обеспечивающий поворот системы по азимуту, а также магнитный демпфер 4, в котором между полюсами магнитов расположен круглый диск, изготовленный из немагнитного материала с высокой проводимостью. Верхний конец крутильной нити весов 5 соединен с телом демпфера, а к ее нижнему концу крепится рабочее тело весов, включающее коромысло 6 с шаровыми грузами 7 на концах и отражающее зеркало 8. Шаровые притягивающие массы 9 фиксируются на круглых отверстиях узлов 10. Вся установка устанавливается на жесткой платформе 11. Источник света 12 направляет на зеркало весов 8 через стеклянное окно камеры 1 луч света, который после отражения от зеркала выходит обратно и проходит мимо двух фотоприемников 13. Колоколообразные импульсы с фотодиодов 13 подаются на компаратор 14. При определенной амплитуде компаратор опрокидывается. Его сигналы с крутыми фронтами поступают на входной порт компьютера 15, который завершает при этом измерение интервала времени, фиксирует его и начинает измерение нового. Последний восьмой интервал, завершающий измерения, компьютер привязывает к реальному времени. После окончания измерений на данной позиции компьютер формирует сигнал на включение электропривода и задает время, в течение которого он не может быть выключен. Выключение двигателя осуществляется кнопочным выключателем после окончания заданного в программе времени и возвращения узлов перемещения в первоначальное положение. Для предотвращения аварийной ситуации в случае сбоя в системе управления предусмотрены кнопочные выключатели, обесточивающие привод до сброса притягивающих масс с узлов фиксации.
Пример. Предложенный способ был апробирован на вакуумированных крутильных весах с периодом колебаний Т0=1676 с. Использовались стальные шаровые притягивающие массы диаметром 101,6 мм и латунные массы диаметром 122 мм. Узлы 10, имеющие 10 круглых установочных отверстий диаметром 13 мм, разворачивались на 90 градусов по отношению к линии равновесия коромысла в противоположные стороны. При размещении притягивающих масс на первой ближней к весам позиции проводилась юстировка по азимуту, при которой весы сохраняли положение равновесия. Затем шаровые массы перемещались на вторую дальнюю позицию, где вновь проверялось сохранение положения равновесия. Вторая позиция, на которой достигался максимум периода колебаний весов, оказалась на четвертом установочном отверстии. Расположение притягивающих шаров на дальней позиции приводит к образованию угла θ между направлением на ось вращения весов и линией равновесия коромысла, на ближней позиции данный угол равен нулю. Наличие угла θ приводит к усложнению аналитических формул (Карагиоз О.В., Измайлов В.П., Шахпаронов В.М. Расчет гравитационной постоянной при фиксации притягивающих масс на произвольных позициях. // Известия высших учебных заведений. Геодезия и аэрофотосъемка. - 2004. - №5. - С.85-94). На стальных массах величиной 4282,544 г при фиксации их на дальней позиции период составлял T2=1683,2 с, на ближней к весам позиции период падал до Т1=1619,l с. На латунных массах величиной 7981,292 г периоды составляли соответственно Т2=1682,7 и Т1=1587,3 с. Дополнительные исследования проводились при отклонении направления перемещения шаровых масс от угла 90 градусов. Программное обеспечение заявленного способа было разработано на базе уже имевшейся программы, обеспечивавшей расчеты при фиксации притягивающих масс на линии равновесия весов. Расчеты проводились как по аналитическим формулам с учетом членов при пятой степени амплитуды колебаний, так и непосредственно по системе двух дифференциальных уравнений. Наличие двух независимых вариантов расчета G позволяет исключить какие-либо ошибки при выводе формул и их программировании. Повышение точности измерений обеспечивалось увеличением разности периодов колебаний весов Т2-Т1 при фиксации масс на двух позициях. При фиксации масс на дальней позиции период колебаний весов Т2 превышал величину Т0. Вследствие этого увеличилась и разность периодов Т2-Т1. Характеристики микросейсм и неравновесных потоков газа изменяются во времени. Поскольку измерения на двух позициях происходят в разное время, эти факторы по разному смещают периоды Т1 и Т2. Высокий вакуум значительно ослабляет влияние неравновесных потоков, но он в процессе работы установки постепенно ухудшается. Регенерация насоса позволяет восстановить вакуум, но проводить ее часто сложно. Приходится работать и при более высоком давлении, при этом влияние потоков неуклонно возрастает. При увеличении интервала времени между измерениями роль микросейсм возрастает. Основной вклад вносят технические микросейсмы, связанные с жизнью города. Однако и естественные дают свой вклад. Флуктуации температуры, а также градиентов температур изменяют расстояния между взаимодействующими массами, что приводит к долгопериодным вариациям G в основном за счет колебаний величины Т1. Увеличение T2-T1 снижает дестабилизирующее влияние всех возможных дестабилизирующих факторов. Следует также отметить, что предлагаемый способ реализуется при значительно меньшем перемещении притягивающих масс (примерно в три раза), что значительно облегчает работу узлов 10, увеличивая их ресурс.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ ГРАВИТАЦИОННОЙ ПОСТОЯННОЙ | 2015 |
|
RU2633000C2 |
| СПОСОБ ИЗМЕРЕНИЯ ГРАВИТАЦИОННОЙ ПОСТОЯННОЙ | 2015 |
|
RU2633804C2 |
| Способ определения гравитационной постоянной с добавлением периода колебаний при отсутствии кареток | 2019 |
|
RU2714518C2 |
| Способ определения гравитационной постоянной с учётом вклада кареток в моменты притяжения | 2018 |
|
RU2691622C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ГРАВИТАЦИОННОЙ ПОСТОЯННОЙ | 2015 |
|
RU2581765C1 |
| Способ определения гравитационной постоянной | 2016 |
|
RU2644437C1 |
| Способ определения гравитационной постоянной | 1974 |
|
SU492837A1 |
| Крутильные весы | 1977 |
|
SU693323A1 |
| Способ определения гистерезисных потерь крутильной системой | 2015 |
|
RU2614647C1 |
| Вакуумированные крутильные весы | 1976 |
|
SU569989A1 |
Изобретение относится к метрологии и может быть использовано при уточнении фундаментальной физической константы - гравитационной постоянной. Согласно изобретению притягивающую массу юстируют в двух или нескольких позициях, измеряют на всех позициях периоды, амплитуды колебаний крутильных весов и приращение расстояния от первоначальной точки, составляя систему уравнений, рассчитывают расстояния между взаимодействующими массами и гравитационную постоянную. Особенность изобретения заключается в том, что при фиксации притягивающих тел на двух позициях массы перемещают и фиксируют двумя узлами перпендикулярно линии равновесия крутильных весов циклически в обоих направлениях, изменяя его на противоположное после измерений на каждой их двух позиций, при этом первую позицию размещают на линии равновесия весов в непосредственной близости от груза коромысла, а вторую выбирают по получению максимума периода крутильных колебаний. Благодаря этому может быть уменьшена погрешность измерений гравитационной постоянной за счет ослабления дестабилизирующих факторов, связанных с микросейсмами, неравновесными потоками разреженного газа и присутствием оператора при выборе следующей позиции. 2 ил.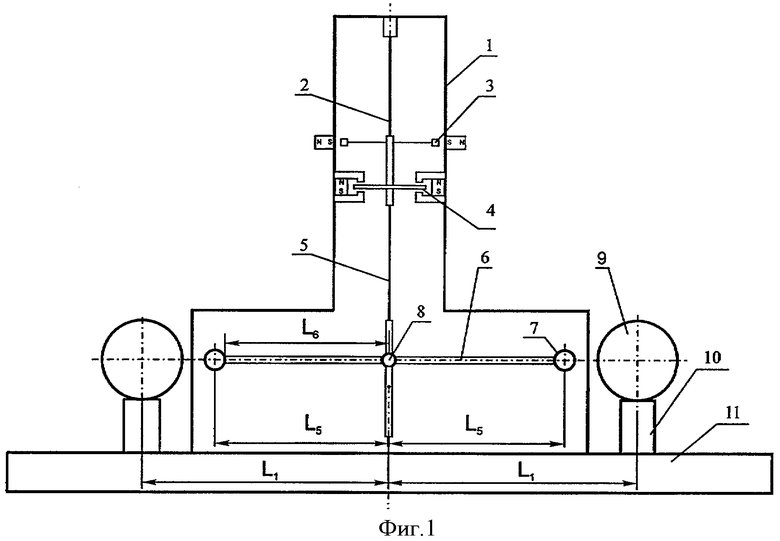
Способ измерения гравитационной постоянной, в котором притягивающую массу юстируют в двух или нескольких позициях, определяют на всех позициях периоды, амплитуды колебаний весов и приращение расстояния от первоначальной точки, составляют систему уравнений и рассчитывают расстояния между взаимодействующими массами и гравитационную постоянную, отличающийся тем, что массы перемещают и фиксируют двумя узлами перпендикулярно линии равновесия весов циклически в обоих направлениях, изменяя его на противоположное после измерений на каждой их двух позиций, при этом первую позицию размещают на линии равновесия весов в непосредственной близости от груза коромысла, а вторую выбирают по получению максимума периода крутильных колебаний.
| Карагиоз О.В | |||
| и др | |||
| Об определении гравитационной постоянной вакуумированными крутильными весами | |||
| Изв | |||
| АН СССР, Физика Земли, №5, 1976, с.106-111 | |||
| Способ определения гравитационной постоянной | 1974 |
|
SU492837A1 |
| САТЕЛЛИТ КОСМИЧЕСКОЙ СТАНЦИИ ДЛЯ ОПРЕДЕЛЕНИЯ ГРАВИТАЦИОННОЙ ПОСТОЯННОЙ В УСЛОВИЯХ КОСМИЧЕСКОГО ПОЛЕТА | 2005 |
|
RU2317573C2 |
| ЧУВСТВИТЕЛЬНЫЙ ЭЛЕМЕНТ УСТРОЙСТВА ДЛЯ ИЗМЕРЕНИЯ ГРАВИТАЦИОННОЙ ПОСТОЯННОЙ | 2005 |
|
RU2282219C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ГРАВИТАЦИОННОЙ ПОСТОЯННОЙ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1993 |
|
RU2112998C1 |
| RU 2005127849 А, 20.03.2007 | |||
| US 7401514 А, 22.07.2008. | |||

