Изобретение относится к электротехнике, конкретно к втяжным электромагнитам поступательного движения. Оно может быть использовано в электромеханизмах, в пневматических и гидравлических системах, где требуются малые перемещения и большие усилия, а также стабильность усилия по перемещению якоря.
Известен электромагнит, имеющий обмотку возбуждения и магнитную систему с рабочим воздушным зазором, включающую в себя постоянный магнит и выполненные из магнитно-мягкого материала корпус, сердечник, якорь, опорный и проходной фланцы (патент №2306626, H01F 7/122, опубл. 2007.09.20) - [1].
Его недостатком является сравнительно малое усилие.
Наиболее близким к предлагаемому изобретению является электромагнит, имеющий магнитопровод, обмотку возбуждения, ферромагнитный якорь и сердечник (патент №2260221, H01F 7/13, H01F 7/16, опубл. 2005.09.10) - [2].
Его недостатком является сравнительно малое усилие и нестабильность по перемещению якоря.
Технической результат, на достижение которого направлено заявленное изобретение, заключается в увеличении усилия электромагнита при сохранении габаритов и потребляемой мощности, а также стабильность усилия по перемещению якоря.
Технический результат достигается тем, что в электромагните, имеющем магнитопровод, обмотку возбуждения, ферромагнитный якорь и корпус, выполнены круговые канавки на внутренней цилиндрической поверхности магнитопровода и на наружной поверхности якоря, и между ними введены коаксиальные полые цилиндры, поочередно механически связанные с корпусом и с якорем, причем каждый полый цилиндр имеет ферромагнитные кольца и немагнитные кольца, имеющие одинаковые осевые размеры соответственно с выступами и пазами на магнитопроводе и на якоре.
Сущность заявленного изобретения поясняется на чертеже - конструктивной схеме электромагнита.
Предлагаемый электромагнит имеет магнитопровод 1 с двумя коническими наконечниками 2, имеющими кольцевые выступы 3, полые цилиндры 4, 5, якорь 6 с тягой 7, немагнитную втулку 8, обмотку 9, корпус 10 и возвратную пружину 11. Полые цилиндры 4 представляют собой набор колец из ферромагнитного и немагнитного материалов, они механически связаны с якорем 6 и движутся вместе с ним.
Полые цилиндры 5 представляют собой набор колец из ферромагнитного и немагнитного материалов, они механически связаны с магнитопроводом 1 и неподвижны. Якорь 6 имеет кольцевые выступы. Толщина полых цилиндров 4, 5 в два раза больше, чем высота выступов на магнитопроводе и на якоре.
Ферромагнитные кольца показаны косой штриховкой, а немагнитные заштрихованы как диэлектрик. Осевая ширина всех ферромагнитных колец и выступов одинаковая.
Электромагнит работает следующим образом. При обесточенной обмотке возвратная пружина 11 перемещает якорь 6 вправо до упора. При этом имеется небольшое перекрытие выступов и ферромагнитных колец (на чертеже якорь показан в среднем положении). При подаче напряжения на обмотку по ней течет электрический ток, возникает магнитный поток и появляется электромагнитная сила, действующая влево на якорь и на связанный с ним полый цилиндр 4. Эта сила действует через тягу 7 на исполнительный механизм.
Эффективность предлагаемой конструкции по сравнению с классическим втяжным электромагнитом можно показать следующим образом. Сила, действующая на выступ якоря или кольцо полого цилиндра якоря определяется формулами:
 ;
;  ;
;  .
.
Здесь F1 - сила; Um - магнитное напряжение на зазоре; Λ - магнитная проводимость; x - перемещение якоря; µ0 - магнитная постоянная; d - средний по зазору диаметр; b0 - длина перекрытия при выключенной обмотке; δ - длина воздушного зазора; Н - напряженность магнитного поля в зазоре; В - магнитная индукция в зазоре.
Дифференцируя проводимость Λ, получаем:
 ;
; 
Здесь m - число выступов или ферромагнитных колец электромагнита (здесь m=6); Iw - ампервитки (МДС) обмотки.
Из последней формулы следует, что с увеличением числа выступов электромагнита m общая сила F возрастает пропорционально при сохранении МДС обмотки.
Отметим, что в первом приближении сила F прямо пропорциональна квадрату тока обмотки и не зависит от перемещения х. Данный электромагнит рекомендуется к применению в механизмах с небольшим перемещением якоря и с большими усилиями исполнительного механизма.
| название | год | авторы | номер документа |
|---|---|---|---|
| Поворотный электромагнит | 2019 |
|
RU2704962C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКОЕ УСТРОЙСТВО ПОСТУПАТЕЛЬНОГО ПЕРЕМЕЩЕНИЯ | 2006 |
|
RU2305360C1 |
| ЭЛЕКТРОМАГНИТНЫЙ УДАРНЫЙ ИНСТРУМЕНТ | 1995 |
|
RU2099175C1 |
| Синхронный электродвигатель с магнитной редукцией | 2018 |
|
RU2704491C1 |
| ЭЛЕКТРОМАГНИТ | 1996 |
|
RU2115185C1 |
| ТЯГОВЫЙ ЦЕПНОЙ ЭЛЕКТРОМАГНИТ | 2001 |
|
RU2217827C2 |
| ЭЛЕКТРОМАГНИТНЫЙ ЛИНЕЙНЫЙ ДВИГАТЕЛЬ | 1999 |
|
RU2153758C1 |
| Синхронный электродвигатель с магнитной редукцией | 2017 |
|
RU2668817C1 |
| ЭЛЕКТРОМАГНИТНЫЙ ДВИГАТЕЛЬ С ГОРИЗОНТАЛЬНОЙ ТЯГОВОЙ ХАРАКТЕРИСТИКОЙ (ВАРИАНТЫ) | 1995 |
|
RU2089995C1 |
| ЭЛЕКТРОМАГНИТНЫЙ БЛОК РУЛЕВОГО ПРИВОДА УПРАВЛЯЕМОЙ РАКЕТЫ | 2005 |
|
RU2283472C1 |
Изобретение относится к электротехнике, а именно к втяжным электромагнитам поступательного движения, и может быть использовано в электромеханизмах, в пневматических и гидравлических системах. Техническим результатом является увеличение усилия электромагнита при сохранении габаритов и потребляемой мощности, а также стабильности усилия по перемещению якоря. Электромагнит имеет магнитопровод 1 с двумя коническими наконечниками 2, имеющими кольцевые выступы 3, полые цилиндры 4, 5, представляющие собой набор колец из ферромагнитного и немагнитного материалов и механически связанные поочередно с якорем 6, имеющим кольцевые выступы, и магнитопроводом 1, тягу 7, немагнитную втулку 8, обмотку 9, корпус 10 и возвратную пружину 11. 1 ил.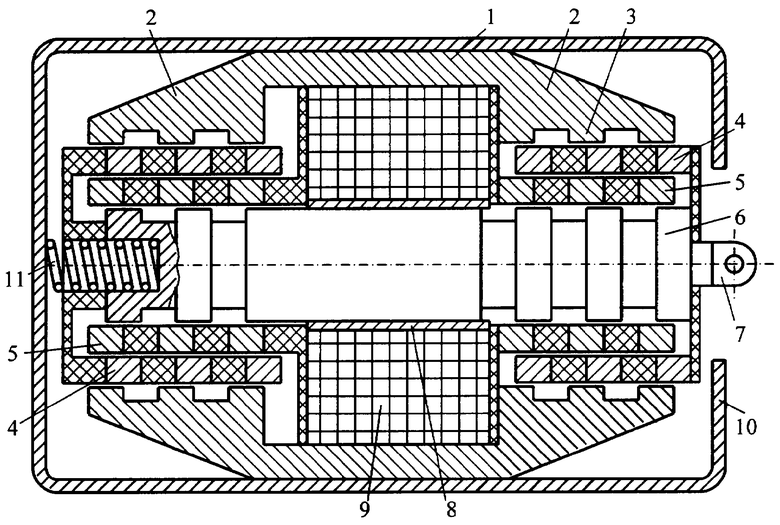
Электромагнит, имеющий магнитопровод, обмотку возбуждения, ферромагнитный якорь и корпус, отличающийся тем, что выполнены круговые канавки на внутренней цилиндрической поверхности магнитопровода и на наружной поверхности якоря, и между ними введены коаксиальные полые цилиндры, поочередно механически связанные с корпусом и с якорем, причем каждый полый цилиндр имеет ферромагнитные и немагнитные кольца, имеющие одинаковые осевые размеры с выступами и пазами на магнитопроводе и на якоре соответственно.
| Электростимулятор нервной системы | 1988 |
|
SU1560230A1 |
| Электромагнит | 1978 |
|
SU718869A1 |
| Электромагнит постоянного тока | 1989 |
|
SU1705890A1 |
| Электромагнит постоянного тока | 1988 |
|
SU1534523A1 |
| ЭЛЕКТРИЧЕСКОЕ УСТРОЙСТВО ДЛЯ СИГНАЛИЗИРОВАНИЯ НА РАССТОЯНИИ | 1926 |
|
SU6477A1 |
| US 4438419 A, 20.03.1984 | |||
| Устройство для сгонки тел качения подшипников в сборочном автомате | 1985 |
|
SU1263929A1 |

