Изобретение относится к области измерительной техники, к измерительным устройствам, характеризующимся оптическими средствами измерений, и может быть использовано для решения широкого круга технических задач, таких как сборка крупногабаритных конструкций, слежение за положением объекта, наведение на объект и ряде других.
Традиционно дистанционные линейные измерения производятся при помощи визирных труб, а угловые измерения при помощи автоколлиматоров [Оптические приборы в машиностроении, справочник, М., Машиностроение, 1974, стр.122, 168]. При необходимости одновременного измерения линейных и угловых координат такие установки малоэффективны, а измерения на них трудоемки из-за наличия нескольких измерительных баз.
В технике также существует значительное количество контрольно-юстировочных задач, когда требуется дистанционно определять одновременно линейные и угловые координаты объекта. Это, например, контроль временного и температурного дрейфа объектов, наведение на мишень сфокусированного лазерного излучения и др. При необходимости одновременного измерения угловых и линейных координат объекта используются различные комбинации автоколлиматоров и визирных труб.
Известны устройства, объединяющие оба принципа работы и использующие один объектив, что позволяет получить одну измерительную базу и упростить интерпретацию результатов. Например, устройство для измерения угловых и линейных координат, выбранное нами в качестве прототипа [Repot LLNL, UCRL-LR-105821-97-3, стр.187, фигура 10], включающее два измерительных канала. Первый канал измерения угловых координат объекта работает следующим образом. Источник света освещает марку в виде перекрестия, установленную в фокальной плоскости объектива, затем световой луч проходит светоделитель, объектив, отражается от установленного на объекте контроля автоколлимационного зеркала с нанесенной на него второй рассеивающей маркой, проходит в обратном ходе объектив, отражается от поверхности светоделителя, проходит второй светоделитель и попадает на матричное фотоприемное устройство канала измерения угла. В плоскость фотоприемного устройства проецируется изображение первой марки, положение которой относительно координат фотоприемного устройства зависит от угла наклона автоколлимационного зеркала относительно оптической оси по двум взаимно перпендикулярным координатам. Данные с фотоприемника передаются в ЭВМ, которая по известным алгоритмам определяет положение изображения марки относительно координат приемника и рассчитывает угол поворота автоколлимационного зеркала (объекта) с учетом фокусного расстояния объектива и размера элемента матричного фотоприемника.
Второй канал измерения линейных координат объекта работает так. Матричное фотоприемное устройство канала линейных измерений располагается таким образом, чтобы спроецировать изображение нанесенной на автоколлимационное зеркало второй рассеивающей марки в плоскость фотоприемника, при этом световой луч проходит через объектив, отражаясь от светоделительных поверхностей двух светоделителей. Подсветка второй рассеивающей марки производится тем же источником света через светоделитель и объектив. Координаты изображения рассеивающей марки относительно координат приемника канала линейных перемещений зависят от поперечного смещения марки в поле зрения объектива. Данные с фотоприемника передаются в ЭВМ, которая по известным алгоритмам определяет положение изображения второй рассеивающей марки относительно координат приемника и рассчитывает координаты второй марки (объекта) с учетом дистанции от объектива до марки (объекта), фокусного расстояния объектива и размера элемента матричного фотоприемника.
Это устройство при достаточно высокой чувствительности как к угловому, так и к линейному перемещению объекта, имеет ряд существенных недостатков. Это, в первую очередь, малый диапазон угловых измерений, который связан с диаметром входного зрачка объектива при больших расстояниях до объекта. При больших дистанциях до объекта диаметр входного зрачка объектива определяется уже не необходимым разрешением (определяемым относительным отверстием объектива), а требуемым диапазоном работы канала измерения угла, что при увеличении диапазона измерений приводит к увеличению габаритов высокоточных оптических элементов. Например, при параметрах схемы, приведенной нами в качестве примера реализации изобретения (расстояние до объекта 4000 мм, диапазон угловых измерений ±4 угл.град), световой диаметр объектива прототипа составил бы не менее 560 мм.
Другими недостатками устройства являются значительные габариты и сложность схемы, связанные с наличием двух раздельных каналов угловых и линейных измерений.
Нами предложено широкодиапазонное дистанционное устройство измерения угловых и линейных координат объекта. Устройство имеет простую в изготовлении конструкцию и уменьшенные массогабаритные характеристики.
Такой технический результат достигнут нами, когда в устройстве измерения угловых и линейных координат объекта, содержащем осветитель, расположенные по ходу луча светоделитель, объектив, размещенную на объекте марку и установленный в сопряженной с объектом плоскости матричный фотоприемник с блоком обработки информации, причем осветитель установлен в фокальной плоскости объектива, новым является то, что марка выполнена в виде сегмента фокусирующего зеркала, расположенного на рефлексной поверхности, при этом фокусное расстояние сегмента фокусирующего зеркала не превышает величины глубины изображаемого пространства объектива.
Зависимость глубины изображаемого пространства от параметров объектива и расстояния до объекта известна.
В качестве сегмента фокусирующего зеркала марки может использоваться сегмент как вогнутого, так и выпуклого сферического или параболического зеркала. Параболическое зеркало может использоваться в большем диапазоне измеряемых углов, так как обладает меньшими полевыми аберрациями.
Под рефлексной поверхностью понимается поверхность, характеризующаяся большим обратным отражением в широком диапазоне углов падения. Это может быть поверхность, покрытая микросферами, или шлифованая поверхность, покрытая отражающим слоем.
На фиг.1а изображена функциональная схема устройства, на фиг.1б - марка увеличенного размера, где осветитель 1, светоделитель 2, объектив 3, марка 4, сегмент фокусирующего зеркала 5, рефлексная поверхность 6, объект 7, матричное фотоприемное устройство 8, блок 9 обработки информации.
На фиг.2 приведено изображение марки и автоколлимационной точки сферического сегмента, снятое с матричного фотоприемника, где темное поле 10 является изображением сегмента фокусирующего зеркала 5, светлое пятно 11 на темном поле - изображением автоколлимационной точки сегмента фокусирующего зеркала 5, а хаотичная структура 12 - изображением рефлексной поверхности 6.
На фиг.3 приведены результаты измерения угловых перемещений объекта. На графике приведена зависимость измеренного угла (по оси ординат) от заданного угла(по оси абсцисс).
На фиг.4 приведены результаты измерения линейных перемещений объекта. На графике приведена зависимость измеренного перемещения (по оси ординат) от заданного перемещения (по оси абсцисс).
Устройство измерения угловых и линейных координат объекта работает следующим образом.
Осветитель 1, установленный в фокальной плоскости объектива 3, через светоделитель 2 и объектив 3 освещает параллельным пучком марку 4, выполненную в виде сегмента фокусирующего зеркала 5, размещенного на рефлексной поверхности 6. Марка 4 установлена на объекте 7. Благодаря тому, что рефлексная поверхность 6 марки 4 возвращает значительную часть света по направлению освещения, а зеркало 5 вследствие выполнения его фокусирующим большую часть лучей отражает так, что они не попадают в апертуру объектива 3, в изображении на матричном фотоприемнике 8 образуется контур сегмента фокусирующего зеркала 5, положение которого относительно координат матрицы фотоприемника 8 позволяет рассчитывать линейные координаты объекта. Отраженный от поверхности сегмента фокусирующего зеркала 5 свет, попадающий в апертуру объектива 3, дает изображение 11 автоколлимационной точки. Изображения зеркального сегмента и автоколлимационной точки зеркала, разнесенные по глубине, проецируются объективом 3 в плоскость фотоприемника 8. Изображение, полученное с фотоприемника 8, приведено на фиг.2.
Благодаря тому, что фокусное расстояние зеркального сегмента 5 выбирают меньше глубины изображаемого пространства объектива 3, в одной плоскости можно одновременно наблюдать изображение зеркального сегмента и автоколлимационной точки. Световой диаметр зеркального сегмента 5 выбирают, исходя из заданного диапазона изменений.
Данные с фотоприемника 8 передаются в блок обработки информации 9 (ЭВМ) для последующего расчета.
Для измерения двух линейных координат объекта используют определение положения центра изображения 10 сегмента фокусирующего зеркала 5 марки 4 относительно координат матричного фотоприемника 8. Для измерения двух угловых координат объекта используют определение положения изображения 11 автоколлимационной точки сегмента фокусирующего зеркала относительно центра изображения 10 сегмента 5 марки 4, изображенного на том же матричном фотоприемнике 8.
Данные с фотоприемника 8 передаются в ЭВМ 9, которая по известным алгоритмам определяет положение центра изображения контура сегмента фокусирующего зеркала 5 марки 4 относительно координат фотоприемника 8 и рассчитывает линейные координаты марки (объекта) с учетом дистанции от объектива 3 до марки 4 (объекта 7), фокусного расстояния объектива 3 и размера элемента матричного фотоприемника 8. ЭМВ также по известным алгоритмам определяет положение изображения автоколлимационной точки сегмента фокусирующего зеркала 5 относительно центра изображения сегмента фокусирующего зеркала 5 и рассчитывает угловые координаты марки 4 (объекта 7) с учетом фокусного расстояния сегмента фокусирующего зеркала 5 и размера элемента матричного фотоприемника 8. Диапазон измерения углов зависит от отношения светового диаметра сегмента фокусирующего зеркала к его фокусному расстоянию (чем больше фокусное расстояние, тем выше чувствительность и меньше диапазон работы). При этом надо учесть, что диапазон возможных фокусных расстояний сегмента фокусирующего зеркала 5 ограничен глубиной изображаемого пространства объектива 3 (например, для параметров схемы, приведенных в примере конкретного исполнения, он не должен превышать 100 мм).
Таким образом, с помощью изображения на одном матричном фотоприемнике дистанционно определяют две линейные и две угловые координаты объекта.
Во многих случаях применение дистанционного малогабаритного одноканального устройства одновременного измерения угловых и линейных координат с расширенным диапазоном измерений углов является предпочтительным, несмотря на некоторое уменьшение чувствительности измерения углов по сравнению с прототипом.
Пример конкретного исполнения устройства (см. фиг.1).
В макете устройства в качестве осветителя использовался светодиод видимого диапазона спектра (длина волны 635 нм), объектив имел фокусное расстояние 1400 мм и световой диаметр 50 мм. Расстояние от объектива до марки (объекта) составляло 4000 мм, фокусное расстояние сегмента сферического фокусирующего зеркала марки равнялось 35 мм, световой диаметра сегмента - 5 мм. Параметры сегмента фокусирующего зеркала были выбраны, исходя из требований Заказчика по диапазону измерений углов (±4 угл.град), чувствительности в канале измерения угла (1 угл.мин) и размеру марки (диаметр не более 10 мм).
В качестве фотоприемника использовалась цифровая камера с матрицей формата 6,4×5,2 мм типа VAC-135 производства фирмы ЭВС, Санкт-Петербург. Данные с матричного фотоприемника передавались в ЭВМ типа Pentium-4 и обрабатывались при помощи корреляционных алгоритмов поиска центра координат изображения контура сегмента фокусирующего зеркала 5 и изображения автоколлимационной точки сегмента 5 относительно координат матричного фотоприемника. Затем полученные координаты изображения пересчитывались на координаты марки (объекта) с использованием известных зависимостей от дистанции, фокусного расстояния объектива, фокусного расстояния сегмента фокусирующего зеркала марки, размера элемента матричного приемника.
На созданном макете были определены основные параметры устройства (диапазон работы, чувствительность к угловым и линейным перемещениям объекта). При работе в качестве эталона был использован стенд, позволяющий с высокой точностью задавать линейные (1 мкм) и угловые (5 угл.с) перемещения марки.
Результаты определения параметров устройства приведены на фиг.3, 4.
Диапазон измерения линейных перемещений составил ±2,4 мм, среднеквадратичное отклонение при измерении линейных перемещений составило 1,9 мкм.
Диапазон измерения угловых перемещений составил ±4 угл.град, среднеквадратичное отклонение при измерении угловых перемещений составило 0,38 угл.мин.
Таким образом, предложено дистанционное устройство для одновременного определения двух линейных и двух угловых координат объекта при помощи одного матричного фотоприемника, обладающее большим диапазоном измерения углов, малыми габаритами и упрощенной конструкцией.
В настоящее время по заданию Заказчика разработан комплект рабочей конструкторской документации для изготовления опытных образцов устройства.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ИЗМЕРЕНИЯ УГЛОВЫХ И ЛИНЕЙНЫХ КООРДИНАТ ОБЪЕКТА | 2013 |
|
RU2519512C1 |
| АВТОКОЛЛИМАТОР ДЛЯ ИЗМЕРЕНИЯ ПЛОСКИХ УГЛОВ | 2007 |
|
RU2353960C1 |
| АВТОКОЛЛИМАТОР ДЛЯ ИЗМЕРЕНИЯ УГЛА СКРУЧИВАНИЯ | 2008 |
|
RU2384812C1 |
| АВТОКОЛЛИМАТОР ДЛЯ ИЗМЕРЕНИЯ УГЛА СКРУЧИВАНИЯ | 2008 |
|
RU2384811C1 |
| АВТОКОЛЛИМАЦИОННОЕ УСТРОЙСТВО ДЛЯ ЦЕНТРИРОВКИ ОПТИЧЕСКИХ ЭЛЕМЕНТОВ | 2019 |
|
RU2705177C1 |
| ИЗМЕРИТЕЛЬ УГЛОВ (ВАРИАНТЫ) | 1994 |
|
RU2116618C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВ ПОВОРОТА ОБЪЕКТА И ДВУХКООРДИНАТНЫЙ АВТОКОЛЛИМАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2024 |
|
RU2828450C1 |
| АВТОКОЛЛИМАТОР | 2021 |
|
RU2769305C1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННОЙ ОРИЕНТАЦИИ ОБЪЕКТОВ | 2009 |
|
RU2408840C1 |
| ПРИБОР ДЛЯ ДНЕВНОГО И НОЧНОГО НАБЛЮДЕНИЯ И ПРИЦЕЛИВАНИЯ | 2006 |
|
RU2310219C1 |
Устройство измерения угловых и линейных координат объекта содержит осветитель, расположенные по ходу луча светоделитель, объектив, размещенную на объекте марку и установленный в сопряженной с объектом плоскости матричный фотоприемник с блоком обработки информации. Осветитель установлен в фокальной плоскости объектива. Марка выполнена в виде сегмента фокусирующего зеркала, расположенного на рефлексной поверхности. При этом фокусное расстояние сегмента фокусирующего зеркала не превышает величины глубины изображаемого пространства объектива. Технический результат - создание устройства для одновременного определения линейных и угловых координат объекта при помощи одного матричного фотоприемника, обладающего большим диапазоном измерения углов, малыми габаритами и упрощенной конструкцией. 4 ил.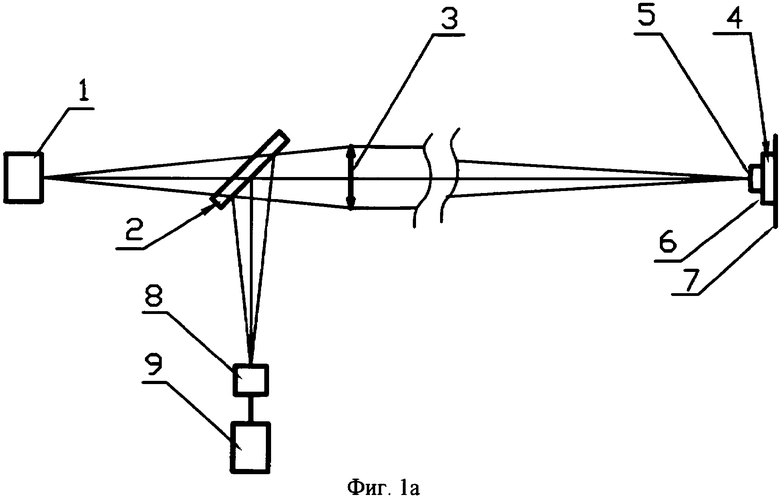
Устройство измерения угловых и линейных координат объекта, содержащее осветитель, расположенные по ходу луча светоделитель, объектив, размещенную на объекте марку и установленный в сопряженной с объектом плоскости матричный фотоприемник с блоком обработки информации, причем осветитель установлен в фокальной плоскости объектива, отличающееся тем, что марка выполнена в виде сегмента фокусирующего зеркала, расположенного на рефлексной поверхности, при этом фокусное расстояние сегмента фокусирующего зеркала не превышает величины глубины изображаемого пространства объектива.
| Устройство для измерения линейных перемещений в двух координатах | 1976 |
|
SU721666A1 |
| US 2006145065 A1, 06.07.2006 | |||
| СПОСОБ ИЗМЕРЕНИЯ ПОЛОЖЕНИЯ ОБЪЕКТА | 1996 |
|
RU2117242C1 |
| Устройство для измерения перемещения светового луча по одной координате на объекте | 1974 |
|
SU526769A1 |

