Изобретение относится к кориолисову расходомеру и к способу измерения расхода.
Кориолисовы расходомеры используются в промышленной измерительной технике для измерения расхода среды, например жидкости или газа, на отрезке трубопровода.
Кориолисовы расходомеры содержат измерительную трубку, которая в измерительном режиме находится в отрезке трубопровода и через которую протекает среда. Измерительная трубка приводится в колебания. На колебания измерительной трубки влияет протекающая жидкость. Измерительная трубка и жидкость образуют сообща колебательную систему, которая, как правило, возбуждается с ее резонансной частотой. Результирующее колебательное движение измерительной трубки регистрируется обычно двумя расположенными на ней датчиками колебаний, сигналы которых принимаются и обрабатываются схемой обработки сигналов. С помощью обработанных сигналов датчиков определяется расход. Сигналы датчиков имеют частоту, равную частоте колебаний измерительной трубки. Они, однако, сдвинуты по фазе. Фазовый сдвиг является мерой расхода среды в измерительной трубке.
На фиг.1 изображен измерительный преобразователь кориолисова расходомера, как он описан, например, в ЕР А1 1298421.
Измерительный преобразователь 1 расположен в измерительном режиме в трубопроводе (не показан), по которому течет среда, чей расход должен быть измерен. Измерительный преобразователь 1 содержит единственную прямую измерительную трубку 3, которая с впускной стороны фиксирована посредством концевой пластины 5 на фланце 7, а с выпускной стороны - посредством концевой пластины 9 на фланце 11. Фланцы 7, 11 и концевые пластины 5, 9 закреплены на или в несущей трубе 13.
Описанное ниже изобретение не ограничено этим специальным измерительным преобразователем 1 с единственной прямой измерительной трубкой 3. Оно может применяться также в сочетании с другими известными измерительными преобразователями. Следует упомянуть, например, измерительные преобразователи, содержащие измерительную трубку с консольной массой (ЕР-А 97810559), и измерительные преобразователи с двумя параллельными прямыми или согнутыми измерительными трубками (US-A 4793191 или US-A 4127028).
В измерительном режиме возбуждаются колебания измерительной трубки 3. Для создания колебаний измерительной трубки 3 посередине между обеими концевыми пластинами 5, 9 на ней расположен возбудитель 15 колебаний.
В качестве возбудителя 15 колебаний подходит, например, электромагнитный привод, состоящий из постоянного магнита 17 и катушки 19. Катушка 19 закреплена на несущей трубе 13, а постоянный магнит 17 - на измерительной трубке 3. Посредством протекающего в катушке 19 тока можно регулировать амплитуду и частоту проходящего в плоскости чертежа изгибного колебания измерительной трубки 3. Колебательная система работает при этом преимущественно в резонансе.
При протекании среды через измерительную трубку 3 в плоскости чертежа возникают силы Кориолиса, за счет которых не все точки колеблются вдоль измерительной трубки 3 в фазе. Колебание измерительной трубки 3 регистрируется с помощью первого 21 и второго 23 датчиков. Датчики 21, 23 расположены преимущественно симметрично относительно возбудителя 15 колебаний. В качестве датчиков 21, 23 подходят, например, электромагнитные преобразователи, содержащие каждый закрепленную на несущей трубе 13 катушку 25, 27 и расположенный на измерительной трубке 3 постоянный магнит 29. Движение измерительной трубки 3 вызывает движение постоянных магнитов 29 в катушках 25, 27 и, тем самым, индуктированное напряжение в соответствующей катушке 25, 27. Индуктированные напряжения могут сниматься через катушки 25, 27, в результате чего они имеются в распоряжении в виде формированных датчиками 21, 23 первого S1 и второго S2 аналоговых сигналов. Оба сигнала S1, S2 имеют одинаковую частоту fs и сдвинуты по фазе. Возникающая между сигналами S1, S2 разность фаз является мерой расхода. Частота fs составляет обычно порядка нескольких сотен герц.
На фиг.2 в качестве примера изображен возможный вариант схемы обработки сигналов, уже сегодня используемой в кориолисовых расходомерах.
При этом сигналы S1, S2 датчиков предварительно обрабатываются в аналоговой форме, затем оцифровываются, а расход определяется в цифровой форме.
Каждый из сигналов S1, S2 через импедансный преобразователь 31 подается с усилением g, например g=1, к предусилителю 33, 35. Предусилитель 35 усиливает входящий второй сигнал S2 с выбираемым, однако постоянным усилением gv2, составляющим обычно 3-10. Предусилитель 33 имеет усиление gv1. Усиление gv1, приобретаемое первым сигналом S1, регулируется предусилителем 33 таким образом, что исчезает доля разности обоих сигналов S1, S2, обусловленная отличием амплитуд на их рабочей частоте. Предварительно усиленные сигналы S1, S2 имеют, тем самым, одинаковую амплитуду и отличаются своей зависимой от расхода фазой.
К описанной схеме предварительной обработки подключены первая 37 и вторая 39 ветви обработки сигналов. Первая ветвь 37 включает в себя дифференциальный усилитель 41, к входам которого приложены преобразованные по импедансу, предварительно усиленные сигналы S1, S2. Дифференциальный усилитель 41 имеет двузначное усиление gΔ, например 27. На выходе в распоряжении имеется, тем самым, первый измерительный сигнал UΔ, соответствующий усиленной разности сигналов S1, S2. Этот первый измерительный сигнал UΔ оцифровывается посредством подключенного к первой ветви 37 обработки сигналов аналого-цифрового преобразователя А/DΔ и, например, через интерфейс 43 подается к схеме 45 цифровой обработки. При этом аналого-цифровой преобразователь А/DΔ может иметь отличное от 1 усиление gA/DΔ.
Вторая ветвь 39 обработки сигналов включает в себя сумматор 47, к входам которого приложены преобразованные по импедансу, предварительно усиленные сигналы S1, S2. Сумматор 47 имеет обычно усиление g∑=1. На выходе в распоряжении имеется, тем самым, второй измерительный сигнал U∑, соответствующий сумме сигналов S1, S2. Второй измерительный сигнал U∑ оцифровывается посредством подключенного ко второй ветви 39 обработки сигналов аналого-цифрового преобразователя A/D∑ и, например, через интерфейс 43 подается к схеме 45 цифровой обработки. Также здесь аналого-цифровой преобразователь A/D∑ может иметь отличное от 1 усиление gA/D∑.
Если измеряемый фазовый угол между сигналами S1, S2 не превышает диапазона в несколько десятков миллирад, то от суммирования можно отказаться без возникновения существенных ошибок. В этом случае следовало бы предусмотреть во второй ветви 39 обработки сигналов вместо сумматора 47 усилитель с усилением g∑, например, 2, тогда второй измерительный сигнал U∑ соответствовал бы усиленному второму сигналу S2 датчика. Штриховая линия на фиг.2, обозначающая суммирование сигналов S1, S2, тогда бы отсутствовала.
В схеме 45 цифровой обработки сигналов определяются затем значение второго измерительного сигнала U∑, а также реальная Re(UΔ) и воображаемая Im(UΔ) части первого измерительного сигнала UΔ. Реальная часть Re(UΔ) первого измерительного сигнала UΔ регулируется до нуля за счет регулируемого усиления gv1. В заключение посредством схемы 45 цифровой обработки сигналов определяется расход М. Он может быть вычислен по следующей формуле:
M=k Im(UΔ)g∑gA/D∑
|U∑|fs gA gA/DΔ,
где k обозначает коэффициент пропорциональности, a fs - частоту сигналов датчиков.
При этом усиления g∑, gA/D∑, gA, gA/DΔ отдельных компонентов первой 37 и второй 39 ветвей обработки сигналов оказывают непосредственное влияние на вычисленный расход М. Если исходить из того, что эти усиления постоянны, то достаточно явным образом скорректировать эти постоянные, например в рамках калибровки расходомера, и записать их в память, так что при расчете расхода М общее усиление, как в приведенной формуле, нормируется до 1.
Исследования показали, что достаточно, если соотношение усилений первой 37 и второй 39 ветвей обработки сигналов не изменяется. При изменении соотношения, например, поскольку усиление отдельных или нескольких компонентов смещается, например, по времени и температуре, это приводит к неточности измерения для определения расхода М, которую можно уменьшить, как правило, только за счет сложной калибровки.
Задачей изобретения является создание кориолисова расходомера, обеспечивающего высокую точность измерения.
Эта задача решается посредством кориолисова расходомера, содержащего, по меньшей мере, одну измерительную трубку, в которой в измерительном режиме возбуждаются колебания и через которую протекает среда, чей расход должен быть измерен, первый и второй датчики для регистрации зависимого от расхода колебания измерительной трубки и для формирования первого и второго сигналов датчиков, генератор опорного сигнала, который накладывает на второй сигнал датчика опорный сигнал, первую ветвь обработки сигналов, которая на основе первого сигнала датчика и вспомогательного сигнала, образованного за счет наложения второго сигнала датчика и опорного сигнала, создает и подготавливает первый сигнал, соответствующий разности между первым сигналом датчика и вспомогательным сигналом, вторую ветвь обработки сигналов, которая на основе вспомогательного сигнала или первого сигнала датчика и вспомогательного сигнала создает и подготавливает второй сигнал, два комплекта по два фильтра, из которых первый служит для отфильтровывания из подготовленного первого сигнала подготовленного первого опорного сигнала и соответствующего разности сигналов датчиков первого измерительного сигнала, а второй - для отфильтровывания из подготовленного второго сигнала подготовленного второго опорного сигнала и второго измерительного сигнала, средства, которые на основе первого и второго подготовленных опорных сигналов определяют соотношение усилений первой и второй ветвей обработки сигналов, и средства для определения расхода на основе первого и второго измерительных сигналов, которые учитывают соотношение усилений.
Согласно одному варианту, второй сигнал равен сумме первого сигнала датчика и вспомогательного сигнала, или фазовый угол между первым и вторым сигналами датчиков составляет менее нескольких десятков миллирад, а второй сигнал равен вспомогательному сигналу.
Согласно другому варианту, первая ветвь обработки сигналов содержит дифференциальный усилитель и аналого-цифровой преобразователь, а вторая ветвь обработки сигналов содержит сумматор или усилитель и аналого-цифровой преобразователь.
Согласно одной модификации, датчики содержат по одной катушке, генератор опорного сигнала соединен с первым выводом катушки второго датчика, а второй вывод этой катушки соединен с входом второй ветви обработки сигналов.
Согласно одному варианту, между вторым выводом катушки первого датчика и входом первой ветви обработки сигналов расположены импедансный преобразователь и предусилитель, предварительное усиление первого сигнала датчика отрегулировано таким образом, что реальная часть первого измерительного сигнала исчезает, а между вторым выводом катушки второго датчика и входом второй ветви обработки сигналов расположены импедансный преобразователь и предусилитель с заданным усилением.
Согласно одной модификации, второй ветви обработки сигналов предвключен суммирующий или дифференциальный усилитель, к входам которого приложены второй сигнал датчика и опорный сигнал, а на выходе которого в распоряжении имеется вспомогательный сигнал.
Далее задача решается посредством кориолисова расходомера, содержащего, по меньшей мере, одну измерительную трубку, в которой в измерительном режиме возбуждаются колебания и через которую протекает среда, чей расход должен быть измерен, первый и второй датчики для регистрации зависимого от расхода колебания измерительной трубки и для формирования первого и второго сигналов, генератор опорного сигнала, который накладывает на второй сигнал датчика опорный сигнал, первую ветвь обработки сигналов, которая на основе первого сигнала датчика и вспомогательного сигнала, образованного за счет наложения второго сигнала датчика и опорного сигнала, создает и подготавливает первый сигнал, соответствующий разности между вспомогательным сигналом и вторым сигналом датчика, вторую ветвь обработки сигналов, которая на основе вспомогательного сигнала или вспомогательного сигнала и второго сигнала датчика формирует второй сигнал, два комплекта по два фильтра, из которых первый служит для отфильтровывания из подготовленного первого сигнала подготовленного первого опорного сигнала и соответствующего разности сигналов датчиков первого измерительного сигнала, а второй - для отфильтровывания из подготовленного второго сигнала подготовленного второго опорного сигнала и второго измерительного сигнала, средства, которые на основе первого и второго подготовленных опорных сигналов определяют соотношение усилений первой и второй ветвей обработки сигналов, и средства для определения расхода на основе первого и второго измерительных сигналов, которые учитывают соотношение усилений.
Далее задача решается посредством способа определения соотношения усилений двух отдельных ветвей обработки сигналов кориолисова расходомера, содержащего первый и второй датчики для регистрации зависимого от расхода колебания измерительной трубки и для формирования первого и второго сигналов датчиков, при котором либо на второй сигнал датчика накладывают опорный сигнал, в первой ветви обработки сигналов создают и подготавливают первый сигнал, соответствующий разности между первым сигналом датчика и вспомогательным сигналом, образованным за счет наложения второго сигнала датчика и опорного сигнала, во второй ветви обработки сигналов создают и подготавливают второй сигнал, соответствующий сумме первого сигнала датчика и вспомогательного сигнала или вспомогательному сигналу, либо на первый сигнал датчика накладывают опорный сигнал, в первой ветви обработки сигналов создают и подготавливают первый сигнал, соответствующий разности между вспомогательным сигналом, образованным за счет наложения первого сигнала датчика и опорного сигнала, и вторым сигналом датчика, во второй ветви обработки сигналов создают и подготавливают второй сигнал, соответствующий сумме вспомогательного сигнала и второго сигнала датчика или вспомогательному сигналу, из первого и второго сигналов отфильтровывают первый и второй подготовленные опорные сигналы и на основе подготовленных опорных сигналов определяют соотношение усилений ветвей обработки сигналов.
Далее задача решается посредством способа определения расхода с помощью предложенного в изобретении кориолисова расходомера, при котором расход пропорционален соотношению воображаемой части первого измерительного сигнала и величины второго измерительного сигнала и обратно пропорционален соотношению усилений.
Согласно одному варианту способа, соотношение усилений определяют многократно, а расход - на основе среднего значения соотношений.
Согласно другому варианту, соотношение усилений определяют многократно. Определяют распределение соотношений, а расход на основе среднего значения соотношений - только тогда, когда соотношения нормально распределены, а стандартное отклонение соотношений лежит ниже заданного значения.
Согласно другому варианту, в расходомере хранится опорное значение соотношения усилений. Измеренное соотношение усилений сравнивают с опорным значением и при наличии отклонения осуществляют компенсацию.
Одно преимущество изобретения в том, что соотношение усилений обеих ветвей обработки сигналов постоянно контролируется. Сложная калибровка ветвей обработки сигналов и их реализация в приборе становятся за счет этого излишними.
Изобретение и другие его преимущества более подробно поясняются с помощью чертежа, на котором изображены четыре примера его осуществления; одинаковые детали обозначены одинаковыми ссылочными позициями. На чертеже представляют:
- фиг.1: измерительный преобразователь кориолисова расходомера;
- фиг.2: традиционную схему обработки сигналов кориолисова расходомера;
- фиг.3: предложенную в изобретении схему обработки сигналов кориолисова расходомера, у которой к катушке второго датчика подключен генератор опорного сигнала;
- фиг.4: другую предложенную в изобретении схему обработки сигналов кориолисова расходомера, у которой опорный сигнал через дифференциальный усилитель наложен на второй сигнал датчика;
- фиг.5: предложенную в изобретении схему обработки сигналов кориолисова расходомера, у которой к катушке первого датчика подключен генератор опорного сигнала;
- фиг.6: другую предложенную в изобретении схему обработки сигналов кориолисова расходомера, у которой опорный сигнал через дифференциальный усилитель наложен на первый сигнал датчика.
Изобретение относится к кориолисову расходомеру с измерительным преобразователем и схемой обработки сигналов и более подробно описано ниже на основе изображенного на фиг.1 измерительного преобразователя и изображенной на фиг.2 схемы обработки сигналов. На фиг.3 и 4 изображены примеры схемы обработки сигналов кориолисова расходомера. Поскольку обе схемы обработки сигналов имеют большие совпадения с изображенной на фиг.2 схемой обработки сигналов, ниже более подробно поясняются только отличия. Однако следует указать на то, что изображенные измерительный преобразователь и схема обработки сигналов являются лишь примером и изобретение может применяться в сочетании с другими измерительными преобразователями и другими схемами обработки сигналов.
Кориолисов расходомер содержит, по меньшей мере, одну измерительную трубку 3, в которой в измерительном режиме возбуждаются колебания и через которую протекает среда, чей расход М должен быть измерен. Изобретение не ограничено, однако, единственной измерительной трубкой. Совершенно аналогичным образом оно может применяться также в кориолисовых расходомерах с двумя или более измерительными трубками. Изображенный измерительный преобразователь содержит первый 21 и второй 23 датчики для регистрации зависимого от расхода М колебания измерительной трубки 3 и для формирования первого S1 и второго S2 сигналов, представляющих колебание. Здесь аналогичным образом справедливо, что могут использоваться намного больше, чем два датчика. Изобретение может применяться также для любой возможной пары из двух датчиков, выбираемых из совокупности имеющихся датчиков.
Согласно одному варианту, кориолисов расходомер содержит генератор опорного сигнала, который накладывает на второй сигнал S2 датчика опорный сигнал R.
Генератор опорного сигнала представляет собой преимущественно генератор напряжения, который накладывает на сигнал S2 датчика напряжение. У описанного расходомера это дает то преимущество, что можно избежать тока, который в определенных условиях мог бы через катушку 27 повлиять на колебание измерительной трубки. Опорный сигнал R является преимущественно осциллирующим напряжением заданной частоты fR, отличающейся от частоты fs сигналов S1, S2 датчиков. При частоте fs, например, 800 Гц частота fR опорного сигнала R может составлять, например, 300 Гц. В качестве генераторов опорного сигнала подходит как аналоговый 48а, так и цифровой 48b генератор. Оба варианта показаны на фиг.3. В качестве аналогового генератора 48а опорного сигнала подходит, например, управляемый напряжением осциллятор (VCO). Эта опция показана на фиг.3 штриховой линией. В качестве альтернативы опорный сигнал R может быть выработан цифровым генератором 48b в цифровой форме, например в форме косинуса или синуса. Цифровой генератор 48b опорного сигнала является преимущественно составной частью имеющейся схемы цифровой обработки сигналов, здесь схемы 45. Цифровой опорный сигнал Rd преобразуется посредством цифроаналогового преобразователя D/A и, при необходимости, усилителя А в аналоговый опорный сигнал R и накладывается на сигнал S2 датчика.
В изображенной на фиг.3 схеме обработки сигналов наложение опорного сигнала R происходит непосредственно через катушку 27 датчика 23. Генератор 48а, 48b опорного сигнала соединен непосредственно с первым выводом 55 катушки 27. Первый вывод 53 катушки 25 присоединен к массе или опорному потенциалу. Второй вывод 57 катушки 25 через импедансный преобразователь 31 и предусилитель 33 соединен с входом первой ветви 37 обработки сигналов. Второй вывод 59 катушки 27 через импедансный преобразователь 31 и предусилитель 35 соединен с входом второй ветви 39 обработки сигналов.
Наложение может осуществляться также иным образом. На фиг.4 изображен пример, в котором наложение вызвано через суммирующий или дифференциальный усилитель, предвключенный второй ветви 39 обработки сигналов. Суммирующий или дифференциальный усилитель может быть при этом дополнительным элементом, включаемым в схему. Преимущественно, однако, используется регулируемый суммирующий или дифференциальный усилитель 61 вместо предусилителя 35. Опорный сигнал R приложен к первому входу 63 суммирующего или дифференциального усилителя 61, предвключенного второй ветви 39 обработки сигналов. Катушки 25, 27 своими первыми выводами 53, 55 присоединены к массе или опорному потенциалу. Второй вывод 59 катушки 27 через импедансный преобразователь 31 соединен со вторым входом 65 суммирующего или дифференциального усилителя 61, предвключенного второй ветви 39 обработки сигналов.
В изображенных примерах датчики 21, 23 снабжены только одной катушкой 25, 27 каждый. Конечно, аналогичным образом могут использоваться также датчики, содержащие две или более катушек. Наложение опорного сигнала R происходит тогда в соответствии с конструкцией датчиков аналоговым путем.
В результате наложения опорного сигнала R на второй сигнал S2 датчика возникает вспомогательный сигнал Н. Он и сигнал S1 датчика подвергаются аналоговой предварительной обработке. Это происходит, например, как при описанной с помощью фиг.1 предварительной обработке сигналов S1, S2 датчиков, причем вспомогательный сигнал Н замещает сигнал S2 датчика на фиг.2.
За предварительной обработкой следует дополнительная обработка первого сигнала S1 датчика и вспомогательного сигнала Н в первой 37 и второй 39 ветвях.
Между вторым выводом 57 катушки 25 и входом первой ветви 37 обработки сигналов расположены импедансный преобразователь 31 и предусилитель 33. Предварительное усиление gv1 первого сигнала S1 датчика отрегулировано таким образом, что реальная часть первого измерительного сигнала UΔ исчезает. Между вторым выводом 59 катушки 27 и входом второй ветви 39 обработки сигналов расположены импедансный преобразователь с усилением g, например, 1 и предусилитель 35 с заданным усилением gv2.
Изображенные на фиг.3 ветви 37, 39 обработки сигналов для простоты выполнены идентичными изображенным на фиг.2. В отличие от фиг.2 здесь к ветвям 37, 39 обработки сигналов подаются преобразованный по импедансу, предварительно усиленный первый сигнал S1 датчика и преобразованный по импедансу, предварительно усиленный вспомогательный сигнал Н. Последний замещает преобразованный по импедансу, предварительно усиленный второй сигнал S2 датчика на фиг.2.
На основе первого сигнала S1 датчика и вспомогательного сигнала Н, образованного за счет наложения опорного сигнала R на второй сигнал S2 датчика, первая ветвь 37 обработки сигналов создает и подготавливает первый сигнал SΔ, соответствующий разности между первым сигналом S1 датчика и вспомогательным сигналом Н.
Соответственно на основе вспомогательного сигнала Н или первого сигнала S1 датчика и вспомогательного сигнала Н вторая ветвь 39 обработки сигналов создает и подготавливает второй сигнал S∑. Он соответствует при этом аналогично фиг.2 сумме первого сигнала S1 датчика и вспомогательного сигнала Н или вспомогательному сигналу Н, усиленному, например, на коэффициент 2. Последний вариант может использоваться, однако, с тем условием, что фазовый угол между первым S1 и вторым S2 сигналами датчиков составляет менее нескольких десятков миллирад. Создание и подготовка происходят в изображенном на фиг.3 примере посредством дифференциального усилителя 41, аналого-цифрового преобразователя А/DΔ, сумматора 47 или усилителя (не показан) и аналого-цифрового преобразователя A/D∑. Разумеется, обе ветви 37, 39 обработки сигналов могут содержать дополнительные элементы для создания и подготовки, которые здесь, однако, для наглядности не показаны. Подготовленные первые S∑ и вторые SΔ сигналы имеются в распоряжении через интерфейс 43.
Согласно изобретению, предусмотрены два, преимущественно идентичных, комплекта по два фильтра. Первый комплект содержит фильтры FSΔ, FR1 и служит для отфильтровывания из подготовленного первого сигнала SΔ подготовленного первого опорного сигнала R1 и соответствующего разности сигналов S1, S2 датчиков первого измерительного сигнала UΔ.
Второй комплект содержит фильтры FS∑, FR2 и служит для отфильтровывания из подготовленного второго сигнала S∑ подготовленного второго опорного сигнала R2 и измерительного сигнала U∑. В зависимости от того, использовался ли во второй ветви 39 обработки сигналов сумматор 47 или усилитель, второй измерительный сигнал U∑ соответствует либо сумме сигналов S1, S2 датчиков, либо усиленному второму сигналу S2 датчика.
Для лучшего понимания здесь фильтры FSΔ, FR1; FS∑, FR2 изображены в виде самостоятельных элементов. Современные схемы 45 обработки сигналов, например цифровые сигнальные процессоры, обладают высокой функциональностью и находят многостороннее применение. В частности, они очень хорошо подходят для выполнения функции фильтров FSΔ, FR1; FS∑, FR2. Соответственно фильтры FSΔ, FR1; FS∑, FR2 могут быть интегрированы в схему 45 цифровой обработки сигналов. Это обозначено на фиг.3 штриховой линией.
Содержащиеся в обеих ветвях 37, 39 обработки сигналов элементы имеют усиления, которые определяются, правда, предварительно на основе их спецификации и настройки или за счет калибровки, однако могут изменяться, например, со временем или из-за изменений температуры. Под усилением сигнальных ветвей 37, 39 здесь подразумевается общее усиление, вызванное взаимодействием всех содержащихся в ветвях 37, 39 обработки сигналов элементов. Оно соответствует произведению отдельных усилений отдельных элементов ветвей 37, 39. Как уже сказано, эти усиления или соотношение усилений первой 37 и второй 39 ветвей обработки сигналов входят в определение расхода. Любое изменение отрицательно сказывается, тем самым, на точности измерения.
Согласно изобретению, эта проблема решается за счет того, что предусмотрены средства 49, которые на основе первого R1 и второго R2 подготовленных опорных сигналов определяют соотношение V усилений первой 37 и второй 39 ветвей обработки сигналов, и средства 51 для определения расхода М, которые определяют его на основе первого UΔ и второго U∑ измерительных сигналов и при этом учитывают соотношение V усилений. Поскольку в обоих случаях речь идет о схеме 45 цифровой обработки сигналов, средства 49, определяющие соотношение V усилений первой 37 и второй 39 ветвей обработки сигналов, и средства 51 для определения расхода М преимущественно интегрированы в эту схему 45.
Первый сигнал SΔ соответствует в примере на фиг.3 усиленной оцифрованной разности между преобразованным по импедансу, предварительно усиленным первым сигналом S1 датчика и преобразованным по импедансу, предварительно усиленным вспомогательным сигналом Н при Н=S2+/-R, т.е.
SΔ=[S1 g gv1-(S2+/-R) g gv2] gΔ gA/DΔ,
где S1 и S2 - первый и второй сигналы датчиков;
R - опорный сигнал;
g - усиление импедансного преобразователя 31;
gv1 - отрегулированное усиление первого предусилителя 33;
gv2 - постоянное усиление второго предусилителя 35;
gΔ - усиление дифференциального усилителя 41;
gA/DΔ - усиление аналого-цифрового преобразователя А/AΔ.
При этом вспомогательный сигнал Н является наложением второго сигнала S2 датчика и опорного сигнала R, реализуемым, например, за счет суммирования, т.е. Н=S2+R, или за счет образования разности, т.е. Н=S2-R. Оба варианта наложения равноценны.
Второй сигнал S∑ соответствует в примере на фиг.3 оцифрованной сумме преобразованного по импедансу, предварительно усиленного первого сигнала S1 датчика и преобразованного по импедансу, предварительно усиленного вспомогательного сигнала Н при Н=S2+/-R, т.е.
S∑=[S1 g gv1+(S2+/-R) g gv2] g∑ gA/D∑,
где S1 и S2 - первый и второй сигналы датчиков;
R - опорный сигнал;
g - усиление импедансного преобразователя 31;
gv1 - отрегулированное усиление первого предусилителя 33;
gv2 - постоянное усиление второго предусилителя 35;
g∑ - усиление сумматора 47;
gA/D∑ - усиление аналого-цифрового преобразователя A/D∑.
У описанной выше альтернативы, где во второй сигнальной ветви 39 не происходит суммирования первого сигнала S1 датчика, соответствующий терм S1 g gv1 в скобках отпал бы в приведенной выше формуле для второго сигнала S∑.
Для варианта на фиг.4 справедливо следующее:
SΔ=[S1 g gv1-(S2 g+/-R)gv2]gΔ gA/DΔ,
S∑=[S1 g gv1+(S2 g+/-R)gv2] g∑ gA/D∑,
поскольку опорный сигнал R у этого варианта не проходит через предвключенный второй ветви 39 обработки сигналов импедансный преобразователь 31. Также здесь у описанной выше альтернативы, где во второй сигнальной ветви 39 не происходит сложения первого сигнала S1 датчика, соответствующий терм S1 g gv1 в скобках отпал бы в приведенной выше формуле для второго сигнала S∑.
Фильтры FR1, FR2 отфильтровывают из первого SΔ и второго S∑ сигналов первый R1 и второй R2 подготовленные опорные сигналы, т.е. отфильтровываются те компоненты, которые имеют опорную частоту fR. Таким образом, для первого подготовленного опорного сигнала R1 возникает вариант на фиг.3:
R1=-/+R g gv2 gΔ gA/DΔ
Соответственно для варианта на фиг.4 справедливо:
R1=-/+R gv2 gΔ gA/DΔ
Для подготовленного второго опорного сигнала R2 в варианте на фиг.3 справедливо:
R2=+/-R g gv2 g∑ gA/D∑
Соответственно для варианта на фиг.4 справедливо:
R2=+/-R gv2 g∑ gA/D∑
Подготовленные опорные сигналы R1, R2 имеют такой вид и тогда, когда во второй сигнальной ветви 39 не производилось сложения первого сигнала S1 датчика.
Соотношение V усилений первой 37 и второй 39 ветвей обработки сигналов возникает, тем самым, непосредственно из значения частного первого R1 и второго R2 опорных сигналов. Таким образом, справедливо:
V=|R1/R2|=gΔ gA/DΔ
gΣ gA/DΣ
Это соотношение V или, что эквивалентно этому, его обратное значение 1/V определяется в схеме 45 цифровой обработки сигналов средствами 49.
Фильтры FSΔ, FS∑ отфильтровывают из первого SΔ и второго S∑ сигналов первый UΔ и второй U∑ измерительные сигналы, т.е. отфильтровываются те компоненты, которые имеют частоту fs сигналов S1, S2 датчиков. Таким образом, для первого измерительного сигнала UΔ справедливо:
UΔ=[S1 g gv1-S2 g gv2] gΔ gA/DΔ
Для второго измерительного сигнала U∑ справедливо:
U∑=[S1 g gv1+S2 g gv2] g∑ gA/D∑
У описанной выше альтернативы, где во второй сигнальной ветви 39 не происходит сложения первого сигнала S1 датчика, конечно, и здесь соответствующий терм S1 g gv1 в скобках отпал бы в приведенной выше формуле для второго измерительного сигнала U∑.
С помощью средств 51 расход М определяют за счет определения воображаемой части Im(UΔ) первого измерительного сигнала UΔ и величины |U∑| второго измерительного сигнала U∑. Определение расхода М происходит тогда аналогично описанному выше определению, причем вместо предварительно скорректированных и хранящихся в памяти постоянных усилений ветвей 37, 39 обработки сигналов используется фактическое измеренное соотношение V усилений. Расход М определяется тогда на основе первого UΔ и второго U∑ измерительных сигналов и фактическое измеренное соотношение V усилений следующим образом:
M=k Im(UΔ)1

где k - коэффициент пропорциональности;
fs - частота сигналов S1, S2 датчиков.
В этом способе определения расхода М с помощью предложенного в изобретении кориолисова расходомера расход М пропорционален отношению воображаемой части Im(UΔ) первого измерительного сигнала UΔ и величины |U∑| второго измерительного сигнала U∑ и обратно пропорционален соотношению V усилений.
На фиг.5 и 6 изображены два других примера схем обработки сигналов предложенных в изобретении кориолисовых расходомеров, используемых, например, в сочетании с изображенным на фиг.1 измерительным преобразователем. Они отличаются от примеров на фиг.3 и 4 только тем, что опорный сигнал R накладывается не на второй сигнал S2 датчика, а на первый S1 датчика. Опорный сигнал R в примере на фиг.5 приложен к первому выводу 53 катушки 25 первого датчика 21.
У изображенной на фиг.6 схемы обработки сигналов наложение вызвано предвключенным первой ветви 37 обработки сигналов суммирующим или дифференциальным усилителем. Он может быть при этом дополнительным элементом, включаемым в схему. Преимущественно, однако, используется регулируемый суммирующий или дифференциальный усилитель 67 вместо предусилителя 33. Опорный сигнал R приложен к первому входу 69 суммирующего или дифференциального усилителя 67, предвключенного первой ветви 37 обработки сигналов. Катушки 25, 27 своими первыми выводами 53, 55 присоединены к массе или опорному потенциалу. Второй вывод 57 катушки 25 через импедансный преобразователь 31 соединен со вторым входом 71 суммирующего или дифференциального усилителя 67, предвключенного первой ветви 37 обработки сигналов.
У изображенных на фиг.5 и 6 схем обработки сигналов в первой ветви 37 на основе вспомогательного сигнала Н, образованного за счет наложения первого сигнала S1 датчика и опорного сигнала R, и второго сигнала S2 датчика создается и подготавливается первый сигнал SΔ, соответствующий разности между вспомогательным сигналом H и вторым сигналом S2 датчика. Во второй ветви 39 на основе вспомогательного сигнала Н и второго сигнала S2 датчика создается и подготавливается второй сигнал S∑, соответствующий сумме вспомогательного сигнала Н и второго сигнала S2 датчика. Здесь в качестве альтернативы аналогично описаниям фиг.3 и 4 можно отказаться от образования суммы за счет создания и подготовки во второй ветви 39 второго сигнала S∑, соответствующего вспомогательному сигналу Н. Вместо сумматора 47 выступает тогда усилитель, который усиливает вспомогательный сигнал Н с усилением gv2. В этом случае отпадает обозначенное на фиг.5 и 6 штриховой линией соединение между предусилителем 35 и второй ветвью 39.
Описанная выше альтернатива, у которой во второй ветви 39 вместо образования суммы усиливается и подготавливается только второй сигнал S2 датчика, здесь недопустима, поскольку тогда соотношение V усилений не удастся определить описанным выше образом.
У вариантов на фиг.5 и 6, как у описанных выше вариантов, предусмотрены два преимущественно идентичных комплекта по два фильтра FSΔ, FR1; FS∑, FR2, из которых первый служит для отфильтровывания из подготовленного первого сигнала
SΔ подготовленного первого опорного сигнала R1 и соответствующего разности сигналов S1, S2 датчиков первого измерительного сигнала UΔ, а второй - для отфильтровывания из подготовленного второго сигнала S∑ подготовленного второго опорного сигнала R2 и второго измерительного сигнала U∑. Также здесь предусмотрены средства 49, которые на основе первого R1 и второго R2 подготовленных опорных сигналов определяют соотношение V усилений первой 37 и второй 39 ветвей обработки сигналов, и средства 51 для определения расхода М на основе первого UΔ и второго U∑ измерительных сигналов, которые учитывают соотношение V усилений.
Первый сигнал SΔ соответствует в примере на фиг.5 усиленной оцифрованной разности между преобразованным по импедансу, предварительно усиленным вспомогательным сигналом Н при Н=S1+/- R и преобразованным по импедансу, предварительно усиленным вторым сигналом S2 датчика, т.е.
SΔ=[(S1+/-R) g gv1-S2 g gv2] gΔ gA/DΔ
Для варианта на фиг.6 соответственно справедливо:
SΔ=[(S1 g+/-R) gv1-S2 g gv2] gΔ gA/DΔ
Второй сигнал S∑ соответствует в примере на фиг.5 оцифрованной сумме преобразованного по импедансу, предварительно усиленного вспомогательного сигнала Н при Н=S1+/-R и преобразованного по импедансу, предварительно усиленного второго сигнала S2 датчика, т.е.
S∑=[(S1+/-R) g gv1+S2 g gv2] g∑ gA/D∑
Для варианта на фиг.6 соответственно справедливо:
S∑=[(S1 g+/-R) gv1+S2 g gv2] g∑ gA/D∑
У описанной выше альтернативы, где во второй сигнальной ветви 39 не происходит суммирования второго сигнала S2 датчика, соответствующий терм S1 g gv2 в скобках отпал бы в приведенной выше формуле для второго сигнала S∑.
Фильтры FR1, FR2 отфильтровывают из первого SΔ и второго S∑ сигналов первый R1 и второй R2 подготовленные опорные сигналы. Таким образом, для первого подготовленного опорного сигнала R1 возникает вариант на фиг.5:
R1=+/-R g gv1 gΔ gA/DΔ,
а для второго подготовленного опорного сигнала R2 в варианте на фиг.5 справедливо:
R2=+/-R gv1 g∑ gA/D∑
Соответственно для варианта на фиг.6 справедливо:
R1=+/-R g gv1 gΔ gA/DΔ
R2=+/-R gv1 g∑ gA/D∑
Соотношение V усилений первой 37 и второй 39 ветвей обработки сигналов возникает, тем самым, непосредственно из частного первого R1 и второго R2 подготовленных опорных сигналов. Таким образом, справедливо:
V=|R1/R2|=gΔ gA/DΔ
g∑ gA/D∑
Все остальное, в частности определение расхода М, происходит так же, как это уже пояснялось в сочетании с фиг.3 и 4.
Помимо собственно кориолисова расходомера изобретение включает в себя дополнительно способ определения соотношения V усилений двух отдельных ветвей 37, 39 обработки сигналов кориолисова расходомера, который содержит первый 21 и второй 23 датчики для регистрации зависимого от расхода колебания измерительной трубки 3 и для формирования первого S1 и второго S2 сигналов датчиков. Согласно этому способу, как уже было описано с помощью предложенного в изобретении кориолисова расходомера, опорный сигнал R накладывается либо на второй сигнал S2 датчика (фиг.3, 4), либо на первый сигнал S1 датчика (фиг.5, 6).
В первом случае в первой ветви 37 создается и подготавливается первый сигнал SΔ, соответствующий разности между первым сигналом S1 датчика и вспомогательным сигналом Н. Во второй ветви 39 создается и подготавливается второй сигнал SΣ, соответствующий сумме первого сигнала S1 датчика и вспомогательного сигнала Н или вспомогательному сигналу Н.
Во втором случае в первой ветви 37 создается и подготавливается первый сигнал SΔ, соответствующий разности между вспомогательным сигналом Н и вторым сигналом S2 датчика.
Во второй ветви 39 создается и подготавливается второй сигнал
S∑, соответствующий сумме вспомогательного сигнала Н и второго сигнала S2 датчика или вспомогательному сигналу Н.
Из первого SΔ и второго S∑ сигналов отфильтровываются первый R1 и второй R2 подготовленные опорные сигналы. Затем на основе подготовленных опорных сигналов R1, R2, как уже сказано, определяется соотношение V усилений ветвей 37, 39 обработки сигналов.
Усиления отдельных компонентов ветвей 37, 39 обработки сигналов изменяются, как правило, очень медленно, поскольку явления старения и изменения температуры происходят очень медленно по отношению к расходу или его изменениям.
Соответственно точность, с которой определяется соотношение V усилений, повышается за счет того, что оно определяется многократно и вычисляется его среднее значение, используемое вместо отдельных измерений. Соответственно расход М определяется тогда на основе среднего значения соотношений V.
Сбои, которые частоты имеют в диапазоне частоты fR опорного сигнала R, могут снизить точность, с которой может быть измерено соотношение V усилений. Таких недостатков можно избежать за счет многократного определения соотношения V усилений и определения распределения соотношений V. Отдельные соотношения V или их среднее значение считаются надежными всегда тогда, когда соотношения V нормально распределены, а стандартное отклонение соотношений V лежит ниже заданного значения. Соответственно расход М определяется на основе измеренного соотношения V или среднего значения соотношений преимущественно только тогда, когда соотношения нормально распределены, а стандартное отклонение соотношений лежит ниже заданного значения.
Если измеренное соотношение или его среднее значение окажется ненадежным на основе приведенного условия, например вследствие кратковременного сбоя, то преимущественно на этот период времени прибегают к скорректированным и хранящимся в памяти постоянным усилений ветвей 37, 39 обработки сигналов или к соотношению, определенному последним как надежное. Фактическое измеренное соотношение V усилений отслеживается дальше и используется снова только тогда, когда представляется надежным.
В приведенных выше рассуждениях измеренное соотношение V усилений или его среднее значение используется непосредственно для определения расхода М. При этом способе фактическое измеренное соотношение или его среднее значение записывается в память преимущественно регулярно. Это дает то преимущество, что при новом включении расходомера оно может осуществляться с записанным последним соотношением V и не приходится ждать наступления колебания всей системы.
В качестве альтернативы в расходомере можно записывать в память также опорное значение VR соотношения усилений, которое сравнивается с измеренным соотношением V усилений. При возникновении отклонения между измеренным соотношением V и опорным значением VR осуществляют компенсацию и хранящееся в памяти опорное значение VR, при необходимости, согласовывают.
Перечень ссылочных позиций
1 - измерительный преобразователь
3 - измерительная трубка
5 - концевая пластина
7 - фланец
9 - концевая пластина
11 - фланец
13 - несущая труба
15 - возбудитель колебаний
17 - постоянный магнит
19 - катушка
21 - датчик
23 - датчик
25 - катушка
27 - катушка
29 - постоянный магнит
31 - импедансный преобразователь
33 - предусилитель
35 - предусилитель
37 - первая ветвь обработки сигналов
39 - вторая ветвь обработки сигналов
41 - дифференциальный усилитель
43 - интерфейс
45 - схема цифровой обработки сигналов
47 - сумматор
48а - аналоговый генератор опорного сигнала
48b - цифровой генератор опорного сигнала
49 - средства для определения соотношения
51 - средства для определения расхода
53 - первый вывод
55 - первый вывод
57 - второй вывод
59 - второй вывод
61 - суммирующий или дифференциальный усилитель
63 - первый вход
65 - второй вход
67 - суммирующий или дифференциальный усилитель
69 - первый вход
71 - второй вход
Кориолисовый расходомер содержит, по меньшей мере, одну измерительную трубку (3), в которой в измерительном режиме возбуждаются колебания и через которую протекает среда, чей расход должен быть измерен, первый (21) и второй (23) датчики для регистрации зависимого от расхода колебания измерительной трубки (3) и для формирования первого (S1) и второго (S2) сигналов датчиков и две отдельные ветви (37, 39) обработки сигналов. При измерении расхода на первый (S1) или второй (S2) сигнал датчика накладывают опорный сигнал (R). Образованный наложением вспомогательный сигнал (Н) проходит через обе ветви (37, 39) обработки сигналов. Из первого сигнала (SΔ) на выходе первой ветви (37) обработки сигналов отфильтровывают первый подготовленный опорный сигнал (R1), а из второго сигнала (SΣ) на выходе второй ветви (39) обработки сигналов отфильтровывают второй подготовленный опорный сигнал (R2) и на основе подготовленных опорных сигналов (R1, R2) определяют соотношение (V) усилений ветвей (37, 39) обработки сигналов. Изобретение обеспечивает высокую точность измерения. 4 н. и 8 з.п. ф-лы, 6 ил.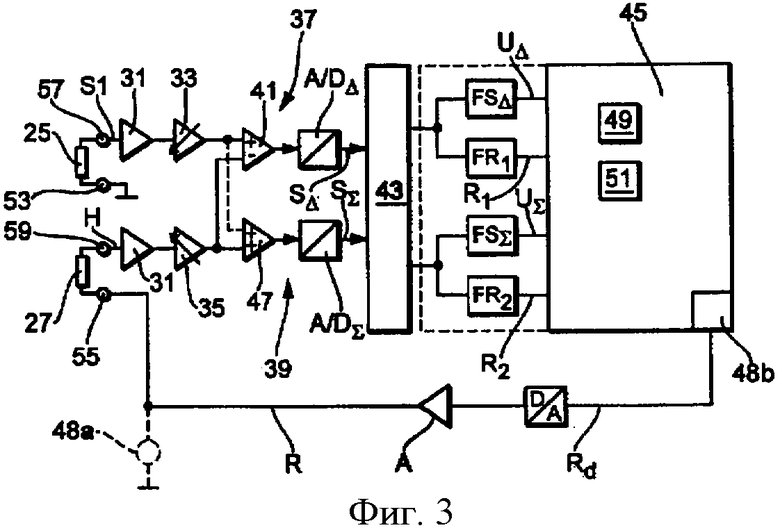
1. Кориолисов расходомер, содержащий, по меньшей мере, одну измерительную трубку (3), выполненную с возможностью возбуждения колебаний в измерительном режиме и протекания через нее среды, чей расход должен быть измерен, первый (21) и второй (23) датчики для регистрации зависимого от расхода колебания измерительной трубки (3) и для формирования первого (S1) и второго (S2) сигналов датчиков, генератор (48а, 48b) опорного сигнала, выполненный с возможностью наложения на второй сигнал (S2) датчика опорного сигнала (R), первую ветвь (37) обработки сигналов, выполненную с возможностью создания и подготовки первого сигнала (SΔ), соответствующего разности между первым сигналом (S1) датчика и вспомогательным сигналом (Н), на основе первого сигнала (S1) датчика и вспомогательного сигнала (Н), образованного за счет наложения второго сигнала (S2) датчика и опорного сигнала (R), вторую ветвь (39) обработки сигналов, выполненную с возможностью создания и подготовки второго сигнала (SΣ) на основе вспомогательного сигнала (Н) или первого сигнала (S1) датчика и вспомогательного сигнала (Н), два комплекта по два фильтра (FSΔ, FR1; FSΣ, FR2), из которых первый служит для отфильтровывания из подготовленного первого сигнала (SΔ) подготовленного первого опорного сигнала (R1) и соответствующего разности сигналов (S1, S2) датчиков первого измерительного сигнала (UΔ), а второй - для отфильтровывания из подготовленного второго сигнала (SΣ) подготовленного второго опорного сигнала (R2) и второго измерительного сигнала (UΣ), средства (49) для определения на основе первого (R1) и второго (R2) подготовленных опорных сигналов соотношения усилений первой (37) и второй (39) ветвей обработки сигналов, и средства (51) для определения расхода (М) на основе первого (UΔ) и второго (UΣ) измерительных сигналов, учитывающие соотношение (V) усилений.
2. Расходомер по п.1, характеризующийся тем, что второй сигнал (SΣ) равен сумме первого сигнала (S1) датчика и вспомогательного сигнала (Н), или фазовый угол между первым (S1) и вторым (S2) сигналами датчиков составляет менее нескольких десятков миллирад, а второй сигнал (SΣ) равен вспомогательному сигналу (Н).
3. Расходомер по п.1, характеризующийся тем, что первая ветвь (37) обработки сигналов содержит дифференциальный усилитель (37) и аналого-цифровой преобразователь (A/DΣ), а вторая ветвь (39) обработки сигналов содержит (47) сумматор или усилитель и аналого-цифровой преобразователь (A/DΣ).
4. Расходомер по п.1, характеризующийся тем, что датчики (21, 23) содержат по одной катушке (25, 27), генератор (48а, 48b) опорного сигнала соединен с первым выводом (55) катушки (27) второго датчика (23), а второй вывод (59) этой катушки (27) соединен с входом второй ветви (39) обработки сигналов.
5. Расходомер по п.1, характеризующийся тем, что между вторым выводом (57) катушки (25) первого датчика (21) и входом первой ветви (37) обработки сигналов расположены импедансный преобразователь (31) и предусилитель (33), а предварительное усиление первого сигнала (S1) датчика отрегулировано таким образом, что реальная часть (Re(UΔ)) первого измерительного сигнала исчезает, а между вторым выводом (59) катушки (27) второго датчика (23) и входом второй ветви (39) обработки сигналов расположены импедансный преобразователь (31) и предусилитель (35) с заданным усилением.
6. Расходомер по п.1, характеризующийся тем, что второй ветви (39) обработки сигналов предвключен суммирующий или дифференциальный усилитель (61), к входам (63, 65) которого приложены второй сигнал (S2) датчика и опорный сигнал (R), а на выходе которого в распоряжении имеется вспомогательный сигнал (Н).
7. Кориолисов расходомер, содержащий, по меньшей мере, одну измерительную трубку (3), выполненную с возможностью возбуждения колебаний в измерительном режиме и протекания через нее среды, чей расход должен быть измерен, первый (21) и второй (23) датчики для регистрации зависимого от расхода колебания измерительной трубки (3) и для формирования первого (S1) и второго (S2) сигналов датчиков, генератор (48а, 48b) опорного сигнала, выполненный с возможностью наложения на первый сигнал (S1) датчика опорного сигнала (R), первую ветвь (37) обработки сигналов, выполненную с возможностью создания и подготовки первого сигнала (SΔ), соответствующего разности между вспомогательным сигналом (Н) и вторым сигналом (S2) датчика, на основе вспомогательного сигнала (Н), образованного за счет наложения первого сигнала (S1) датчика и опорного сигнала (R), и второго сигнала (S2) датчика, вторую ветвь (39) обработки сигналов, выполненную с возможностью создания и подготовки второго сигнала (SΣ) на основе вспомогательного сигнала (Н) или вспомогательного сигнала (Н) и второго сигнала (S2) датчика, два комплекта по два фильтра (FSΔ, FR1; FSΣ, FR2), из которых первый служит для отфильтровывания из подготовленного первого сигнала (SΔ) подготовленного первого опорного сигнала (R1) и соответствующего разности сигналов (S1, S2) датчиков первого измерительного сигнала (UΔ), а второй - для отфильтровывания из подготовленного второго сигнала (SΣ) подготовленного второго опорного сигнала (R2) и второго измерительного сигнала (UΣ), средства (49) для определения соотношения (V) усилений первой (37) и второй (39) ветвей обработки сигналов на основе первого (R1) и второго (R2) подготовленных опорных сигналов, и средства (51) для определения расхода (М) на основе первого (UΔ) и второго (UΣ) измерительных сигналов, учитывающие соотношение усилений (V).
8. Способ определения соотношения (V) усилений двух отдельных ветвей (37, 39) обработки сигналов кориолисова расходомера, содержащего первый (21) и второй (23) датчики для регистрации зависимого от расхода колебания измерительной трубки (3) и для формирования первого (S1) и второго (S2) сигналов датчиков, при котором либо на второй сигнал (S2) датчика накладывают опорный сигнал (R), в первой ветви (37) обработки сигналов создают и подготавливают первый сигнал (SΔ), соответствующий разности между первым сигналом (S1) датчика и вспомогательным сигналом (Н), образованным за счет наложения второго сигнала (S2) датчика и опорного сигнала (R), во второй ветви (39) обработки сигналов создают и подготавливают второй сигнал (SΣ), соответствующий сумме первого сигнала (S1) датчика и вспомогательного сигнала (Н) или вспомогательному сигналу (Н), либо на первый сигнал (S1) датчика накладывают опорный сигнал (R), в первой ветви (37) обработки сигналов создают и подготавливают первый сигнал (SΔ), соответствующий разности между вспомогательным сигналом (Н), образованным за счет наложения первого сигнала (S1) датчика и опорного сигнала (R), и вторым сигналом (S2) датчика, во второй ветви (39) обработки сигналов создают и подготавливают второй сигнал (SЈ), соответствующий сумме вспомогательного сигнала (Н) и второго сигнала (S2) датчика или вспомогательному сигналу (И), из первого (SΔ) и второго (SΣ) сигналов отфильтровывают первый (R1) и второй (R2) подготовленные опорные сигналы и на основе подготовленных опорных сигналов (R1, R2) определяют соотношение (V) усилений ветвей (37, 39) обработки сигналов.
9. Способ определения расхода (М) с помощью кориолисова расходомера по п.8, при котором расход (М) пропорционален соотношению воображаемой части (Im(UΔ)) первого измерительного сигнала (UΔ) и величины второго измерительного сигнала (UΣ) и обратно пропорционален соотношению (V) усилений.
10. Способ по п.9, характеризующийся тем, что соотношение усилений определяют многократно, а расход (М) - на основе среднего значения соотношений (V).
11. Способ по п.9, характеризующийся тем, что соотношение (V) усилений определяют многократно, определяют распределение соотношений (V), а расход (М) на основе среднего значения соотношений (V) только тогда, когда соотношения (V) нормально распределены, а стандартное отклонение соотношений (V) лежит ниже заданного значения.
12. Способ по п.9, характеризующийся тем, что в расходомере хранится опорное значение (VR) соотношения (V) усилений, измеренное соотношение (V) усилений сравнивают с опорным значением (VR) и при наличии отклонения осуществляют компенсацию.
| Устройство для бурения скважин (его варианты) | 1984 |
|
SU1229309A1 |
| US 6332366 В1, 25.12.2001 | |||
| СПОСОБ И УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ МАССОВОГО РАСХОДА МАТЕРИАЛА В МАССОВОМ РАСХОДОМЕРЕ КОРИОЛИСА | 1996 |
|
RU2155325C2 |
| Способ окисления боковых цепей ароматических углеводородов и их производных в кислоты и альдегиды | 1921 |
|
SU58A1 |

