Изобретение относится к Кориолисову массовому расходомеру и к способу компенсации ошибок передачи его входной схемы.
Кориолисовы массовые расходомеры используются в промышленной измерительной технике для измерения массового расхода среды на участке трубопровода.
Кориолисовы массовые расходомеры содержат измерительную трубку, которая в измерительном режиме находится на участке трубопровода и через которую протекает среда. Измерительная трубка приводится в колебания. На колебания измерительной трубки влияет протекающая через нее среда. Измерительная трубка и среда образуют сообща колебательную систему, которая, как правило, возбуждается со своей резонансной частотой. Результирующее колебательное движение измерительной трубки регистрируется обычно двумя расположенными на ней датчиками колебаний, сигналы которых воспринимаются и подготавливаются посредством входной схемы. С помощью подготовленных сигналов датчиков определяется массовый расход. Сигналы датчиков имеют частоту, равную частоте колебаний измерительной трубки. Однако они сдвинуты по фазе по отношению друг к другу. Фазовый сдвиг является мерой массового расхода среды в измерительной трубке.
В ЕР-А 1298421 описан такой измерительный преобразователь Кориолисова массового расходомера, у которого сигналы датчиков подаются к соответствующей входной ветви входной схемы за счет их усиления и последующего оцифровывания. Усиленные оцифрованные сигналы датчиков подаются к цифровому сигнальному процессору, который с помощью этих сигналов определяет массовый расход. Определение массового расхода происходит известными методами, в которых вычисляется, например, фазовый или временной сдвиг между обоими сигналами датчиков и на этой основе определяется массовый расход.
При этом усилитель, аналого-цифровой преобразователь и, при необходимости, имеющиеся во входной ветви пассивные фильтры создают, как правило, недостаточно специфицированное и смещающееся фазовое вращение или фазовый сдвиг. Результирующая из этого погрешность нулевой точки является критической, в частности, тогда, когда определение массового расхода происходит с помощью параллельной обработки отдельных сигналов датчиков. В то время, как названные погрешности нулевой точки при определении массового расхода можно, по меньшей мере, частично компенсировать с помощью сигналов суммы и/или разности сигналов датчиков, при параллельной обработке любая асимметрия входных ветвей входной схемы сказывается в результирующей погрешности нулевой точки.
Это приводит к неточности измерения при определении массового расхода, которую можно уменьшить, как правило, только за счет сложных калибровок.
Поэтому задачей изобретения является создание Кориолисова массового расходомера, который обеспечивал бы высокую точность измерений.
Другая задача состоит в создании способа компенсации ошибок передачи входной схемы Кориолисова массового расходомера, посредством которого достигалась бы высокая точность измерений.
Для этого изобретение состоит в Кориолисовом массовом расходомере, содержащем измерительную трубку, в которой в измерительном режиме возбуждаются колебания и через которую протекает среда, чей массовый расход должен быть измерен, первый и второй датчики для регистрации зависимого от массового расхода колебания измерительной трубки и для формирования первого и второго сигналов датчиков, по меньшей мере, один генератор опорных сигналов, который накладывает на первый и второй сигналы датчиков один и тот же опорный сигнал, первую входную ветвь для подготовки первого вспомогательного сигнала, образованного первым сигналом датчика и наложенным опорным сигналом, вторую входную ветвь для подготовки второго вспомогательного сигнала, образованного вторым сигналом датчика и наложенным опорным сигналом, средства для отфильтровывания из подготовленного первого вспомогательного сигнала подготовленного первого сигнала датчика и подготовленного первого опорного сигнала, средства для отфильтровывания из подготовленного второго вспомогательного сигнала подготовленного второго сигнала датчика и подготовленного второго опорного сигнала, средства для определения фазовой разности или разности времени прохождения между первым и вторым подготовленными опорными сигналами, средства для корректировки фазовой разности или разности времени прохождения между первым и вторым подготовленными сигналами датчиков с помощью фазовой разности или разности времени прохождения между первым и вторым подготовленными опорными сигналами, и средства для определения массового расхода с помощью корректированных подготовленных сигналов датчиков.
Согласно первому варианту, средства для отфильтровывания из подготовленного первого вспомогательного сигнала подготовленного первого сигнала датчика и подготовленного первого опорного сигнала и средства для отфильтровывания из подготовленного второго вспомогательного сигнала подготовленного второго сигнала датчика и подготовленного второго опорного сигнала содержат два идентичных комплекта, по меньшей мере, по два фильтра, из которых первый служит для отфильтровывания из подготовленного первого вспомогательного сигнала подготовленного первого сигнала датчика и подготовленного первого опорного сигнала, а второй - для отфильтровывания из подготовленного второго вспомогательного сигнала подготовленного второго сигнала датчика и подготовленного второго опорного сигнала.
Согласно одному варианту, входные ветви содержат усилитель и аналого-цифровой преобразователь, а фильтры являются цифровыми фильтрами.
Согласно одному варианту, генератор опорных сигналов представляет собой генератор напряжения или цифровой генератор опорных сигналов, а каждый опорный сигнал представляет собой осциллирующее напряжение заданной частоты.
Согласно одному варианту, датчики содержат по одной катушке, а генератор опорных сигналов соединен с первым выводом одной катушки и с первым выводом другой катушки. Второй вывод одной катушки соединен с входом первой входной ветви, а второй вывод другой катушки - с входом второй входной ветви.
Далее изобретение состоит в способе компенсации фазовой разности или разности времени прохождения подготовленных в отдельных входных ветвях сигналов датчиков Кориолисова массового расходомера, при котором опорный сигнал накладывается параллельно на все сигналы датчиков, каждый из этих образованных наложением вспомогательных сигналов проходит через собственную входную ветвь, из подготовленных во входных ветвях вспомогательных сигналов отфильтровываются соответствующий входной ветви подготовленный сигнал датчика и соответствующий подготовленный опорный сигнал, определяется существующая между каждыми двумя подготовленными опорными сигналами фазовая разность или разность времени прохождения и с помощью этой фазовой разности или разности времени прохождения осуществляется компенсация фазовой разности или разности времени прохождения между двумя сигналами датчиков, подготовленными в обеих входных ветвях, в которых подготовлены также оба опорных сигнала.
Согласно одному варианту способа, существующая между каждыми двумя подготовленными опорными сигналами фазовая разность или разность времени прохождения регистрируется в течение отрезка времени, и для компенсации фазовой разности или разности времени прохождения между двумя актуально подготовленными сигналами датчиков привлекаются зарегистрированные в течение отрезка времени фазовые разности или разности времени прохождения соответствующих опорных сигналов.
Согласно одному варианту способа, используются два или более опорных сигналов разной частоты. Для каждого опорного сигнала определяется фазовая разность или разность времени прохождения соответствующих подготовленных опорных сигналов. Определяется частотная зависимость обусловленных входными ветвями фазовых разностей или разностей времени прохождения между парами подготовленных опорных сигналов, и при компенсации учитываются частота сигналов датчиков и частотная зависимость обусловленных входными ветвями фазовых разностей или разностей времени прохождения.
Согласно другому варианту способа, амплитуда опорного сигнала сравнивается с амплитудами соответствующих подготовленных опорных сигналов, и на этой основе для каждой входной ветви определяется коэффициент усиления, учитываемый при дальнейшей обработке подготовленных сигналов датчиков.
Дополнительно изобретение состоит в способе определения схемно-обусловленной фазовой разности или разности времени прохождения между подготовленными в отдельных входных ветвях сигналами датчиков или диагностики состояния Кориолисова массового расходомера, при котором опорный сигнал подается параллельно к двум входным ветвям, определяется фазовая разность или разность времени прохождения, существующая на выходе обеих входных ветвей между подготовленными опорными сигналами, и на этой основе выводится ожидаемая для сигналов датчиков, вызванная входными ветвями фазовая разность или разность времени прохождения.
Далее изобретение включает в себя способ определения времени прохождения, требующего сигнала датчика Кориолисова массового расходомера для прохождения через входную ветвь, при котором генератор опорных сигналов создает серию опорных сигналов, проходящую через входную ветвь, и измеряется необходимое для этого время прохождения.
Одно преимущество изобретения состоит в том, что характер передачи входной схемы контролируется постоянно. За счет этого становятся излишними сложная калибровка входной схемы и ее установка и реализация в приборе.
Другое преимущество изобретения состоит в том, что за счет постоянного контроля можно избежать также погрешностей измерения, если во входной схеме вместо дорогих деталей с небольшими колебаниями в характере передачи использовать более дешевые элементы, которые при определенных условиях могут иметь заметно большие колебания в характере передачи.
Изобретение и другие преимущества более подробно поясняются с помощью чертежей, на которых изображены несколько примеров его осуществления; одинаковые детали обозначены на чертежах одинаковыми ссылочными позициями. На чертежах:
- фиг.1: измерительный преобразователь Кориолисова массового расходомера;
- фиг.2: подключенная к датчикам входная схема Кориолисова массового расходомера;
- фиг.3: первая схема для подачи опорного сигнала, в которой генератор опорного сигнала подключен к катушкам датчиков;
- фиг.4: вторая схема для подачи опорного сигнала, в которой он накладывается на сигналы датчиков через дифференциальный усилитель;
- фиг.5: подключенная к датчикам входная схема, содержащая три генератора опорных сигналов;
- фиг.6: схемно-обусловленная разность времени прохождения в зависимости от частоты.
На фиг.1 изображен измерительный преобразователь 1 Кориолисова массового расходомера. Преобразователь 1 расположен в измерительном режиме в трубопроводе (не показан), по которому течет среда, например газ или жидкость, чей расход должен быть измерен. Измерительный преобразователь 1 содержит единственную прямую измерительную трубку 3, которая с впускной стороны фиксирована посредством концевой пластины 5 на фланце 7, а с выпускной стороны - посредством концевой пластины 9 на фланце 11. Фланцы 7, 11 и концевые пластины 5, 9 закреплены на или в несущей трубе 13.
Изобретение не ограничено этим специальным измерительным преобразователем 1 с единственной прямой измерительной трубкой 3. Оно может применяться также в сочетании с другими известными измерительными преобразователями. Следует упомянуть, например, измерительные преобразователи, содержащие измерительную трубку с консольной массой (ЕР-А 97810559), измерительные преобразователи с согнутой измерительной трубкой (ЕР-А 9610942) и измерительные преобразователи с двумя параллельными прямыми или согнутыми измерительными трубками (US-A 4793191 или US-A 4127028).
В измерительном режиме возбуждаются колебания измерительной трубки 3. Для создания колебаний измерительной трубки 3 посередине между обеими концевыми пластинами 5, 9 на ней расположен возбудитель 15 колебаний.
В качестве возбудителя 15 колебаний подходит, например, электромагнитный привод, состоящий из постоянного магнита 17 и катушки 19. Катушка 19 закреплена на несущей трубе 13, а постоянный магнит 17 - на измерительной трубке 3. Посредством протекающего в катушке 19 тока можно регулировать амплитуду и частоту проходящего в плоскости чертежа изгибного колебания измерительной трубки 3. Колебательная система работает при этом преимущественно в резонансе.
В плоскости чертежа возникают силы Кориолиса, за счет которых не все точки колеблются вдоль измерительной трубки 3 в фазе. Колебание измерительной трубки 3 регистрируется с помощью первого 21 и второго 23 датчиков. Датчики 21, 23 расположены преимущественно симметрично относительно возбудителя 15 колебаний. В качестве датчиков 21, 23 подходят, например, электромагнитные преобразователи, содержащие каждый закрепленную на несущей трубе 13 катушку 25, 27 и расположенный на измерительной трубке 3 постоянный магнит 29, 31. Движение измерительной трубки 3 вызывает движение постоянных магнитов 29, 31 в катушках 25, 27 и, тем самым, индуктированное напряжение в соответствующей катушке 25, 27. Индуктированные напряжения могут сниматься через катушки 25, 27, в результате чего они имеются в распоряжении в виде формированных датчиками 21, 23 первого S1 и второго S2 аналоговых сигналов. Оба сигнала S1, S2 имеют одинаковую частоту fs и сдвинуты по фазе. Возникающая между сигналами S1, S2 разность фаз является мерой массового расхода. Частота fs составляет обычно порядка нескольких сотен герц.
На фиг.2 изображена подключенная к датчикам 21, 23 входная схема Кориолисова массового расходомера. Входная схема включает в себя генератор 33 опорного сигнала, который накладывает на первый S1 и второй S2 сигналы один и тот же опорный сигнал R. Преимущественно генератор 33 является генератором напряжения, который накладывает на сигналы S1, S2 напряжение. В описанном массовом расходомере это дает то преимущество, что предотвращается поток тока, который при определенных условиях мог бы через катушки 25, 27 оказать влияние на колебание измерительной трубки. Опорный сигнал R является преимущественно осциллирующим напряжением заданной частоты fR, отличающейся от частоты fs сигналов S1, S2. При частоте fs, например, 800 Гц частота fR опорного сигнала R может составлять, например, 300 Гц. В качестве генераторов опорных сигналов подходят, например, управляемые напряжением осцилляторы (VCO). Точно так же опорный сигнал R может формироваться цифровым генератором 34 опорного сигнала, являющимся, например, составной частью так и так имеющегося блока 39 обработки сигналов, в цифровой форме, например в форме синуса. Как обозначено на фиг.2 штриховыми соединительными линиями, цифровой опорный сигнал Rd преобразуется посредством цифроаналогового преобразователя D/A и, при необходимости, усилителя A3 в аналоговый опорный сигнал R и накладывается на сигналы S1, S2. Цифровые генераторы опорных сигналов дают то преимущество, что положение по фазе формированного цифрового опорного сигнала Rd очень точно известно.
За счет наложения первого S1 и второго S2 сигналов на опорный сигнал R возникают первый H1 и второй Н2 вспомогательные сигналы.
Первый вспомогательный сигнал H1 подается к первой входной ветви 35, которая служит для подготовки первого вспомогательного сигнала H1, образованного первым сигналом S1 датчика и наложенным опорным сигналом R. Аналогичным образом второй вспомогательный сигнал Н2 подается к второй входной ветви 37, которая служит для подготовки второго вспомогательного сигнала H1, образованного вторым сигналом S2 датчика и наложенным опорным сигналом R.
Входные ветви 35, 37 служат для подготовки сигналов. Подготовка сигналов может включать в себя, например, усиление, фильтрование и/или оцифровывание. Входные ветви могут иметь многообразное выполнение. В изображенном примере показаны поэтому только обычно встречающиеся элементы входных ветвей 35, 37. Также возможны и другие, при определенных условиях намного более сложные варианты. Преимущественно обе входные ветви 35, 37 выполнены идентичными. Каждая из них содержит усилитель A1, A2, фильтр F1, F2 и аналого-цифровой преобразователь A/D1, A/D2. Фильтры F1, F2 являются, например, пассивными или АА-фильтрами. Такие детали создают недостаточно специфицированный и смещающийся фазовый сдвиг или фазовое вращение. Также две совершенно идентичные входные ветви 35, 37 имеют поэтому разный характер передачи. Соответственно, за счет этого даже при одновременной подготовке двух идентичных сигналов на выходе входных ветвей 35, 37 между подготовленными сигналами может существовать фазовая разность или разность времени прохождения. Эта схемно-обусловленная фазовая разность или разность времени прохождения тем больше, чем больше входные ветви отличаются друг от друга. Схемно-обусловленная фазовая разность или разность времени прохождения нежелательна, поскольку фактически существующая между сигналами S1, S2 датчиков фазовая разность или разность времени прохождения является зависимой от массового расхода измеряемой величиной, определяемой Кориолисовым массовым расходомером. Поэтому любая схемно-обусловленная фазовая разность или разность времени прохождения негативно сказывается на точности измерений. В традиционных Кориолисовых массовых расходомерах предпринимались попытки поддержания этой погрешности на как можно более низком уровне, например, за счет использования во входных ветвях только деталей с предельно высокой полосой частот. Например, при частоте fs сигналов S1, S2 800 Гц использовались детали с полосой частот порядка 100 МГц. Изобретение устраняет эту неточность измерений. Соответственно могут использоваться детали с заметно меньшей полосой частот. Согласно изобретению, входные ветви 35, 37 имеют преимущественно полосу частот, которая больше частоты fR опорного сигнала R и частоты fs сигналов S1, S2. При частоте fR опорного сигнала R 300 Гц и частоте fs сигналов S1, S2 800 Гц достаточно, например, полосы частот порядка 1 МГц.
Согласно изобретению, на сигналы S1, S2 накладывается опорный сигнал R, и образованные этим наложением вспомогательные сигналы H1, H2 проходят через соответствующую входную ветвь 35, 37. К первой входной ветви 35 подключены средства, которые служат для отфильтровывания из подготовленного первого вспомогательного сигнала H1 подготовленного первого сигнала S1' датчика и подготовленного первого опорного сигнала R1. Ко второй входной ветви 37 подключены средства, которые служат для отфильтровывания из подготовленного второго вспомогательного сигнала H2 подготовленного второго сигнала S2' датчика и подготовленного первого опорного сигнала R2.
В изображенном примере эти средства включают в себя два идентичных комплекта по два фильтра FS1, FR1 и FS2, FR2, из которых первый служит для отфильтровывания из приложенного к выходу первой входной ветви 35 подготовленного первого вспомогательного сигнала Н1′ подготовленного первого сигнала S1′ датчика и подготовленного первого опорного сигнала R1′, а второй - для отфильтровывания из приложенного к выходу второй входной ветви 37 подготовленного второго вспомогательного сигнала H2′ подготовленного второго сигнала S2′ датчика и подготовленного второго опорного сигнала R2′. Поскольку подготовленные вспомогательные сигналы Н1′, H2′ оцифрованы, фильтры FS1, FR1, FS2, FR2 являются цифровыми фильтрами. Оба средства могут иметь также намного более комплексные структуры. Отделение соответствующих подготовленных сигналов S1′, S2′ датчиков от подготовленных опорных сигналов R1′, R2′ может происходить, например, с использованием смесителей и других деталей.
Предусмотрены средства 39, которые служат для определения фазовой разности или разности времени прохождения между первым R1′ и вторым R2′ подготовленными опорными сигналами. В изображенном примере эта задача выполняется цифровым сигнальным процессором 39, к входам которого приложены выходные сигналы фильтров FS1, FR1, FS2, FR2. Для лучшего понимания фильтры FS1, FR1, FS2, FR2 изображены здесь в виде самостоятельных деталей. Современные сигнальные процессоры обладают высокой функциональностью и имеют многостороннее применение. В частности, они очень хорошо подходят для выполнения функции фильтров FS1, FR1, FS2, FR2. Соответственно, фильтры FS1, FR1, FS2, FR2 могут быть интегрированы в сигнальный процессор 39. Это обозначено на фиг.2 штриховой линией.
Фазовая разность Δφ(R1′, R2′) возникает непосредственно из сравнения первого R1′ и второго R2′ подготовленных опорных сигналов и может быть выведена известными методами, например путем сравнения прохождений через нуль, образования корреляции и т.п. Соответствующая разность Δt(R1′, R2′) времени прохождения равна частному от деления фазовой разности Δφ(R1′, R2′) на частоту fR опорного сигнала R:
Δt(R1′, R2′)=Δφ(R1′, R2′)/fR
Поскольку оба подготовленных опорных сигнала R1′, R2′ сводятся к одному и тому же опорному сигналу R, разность Δt(R1′, R2′) времени прохождения подготовленных опорных сигналов R1′, R2′ является чисто схемно-обусловленной разностью времени прохождения, а фазовая разность Δφ(R1′, R2′) - чисто схемно-обусловленной фазовой разностью. При этом характер передачи всей входной схемы охвачен от точки наложения до выхода.
Схемно-обусловленная разность времени прохождения в первом приближении не зависит от частоты. Соответственно, между подготовленными сигналами S1′, S2′ датчиков существует разность Δt(S1′, S2′) времени прохождения, которая в первом приближении равна сумме схемно-обусловленной разности времени прохождения и зависимой от массового расхода разности Δt(S1′, S2′) времени прохождения, фактически имеющейся между сигналами S1′, S2′ датчиков.
Согласно изобретению, предусмотрены средства 39 для корректировки фазовой разности Δφ(S1′, S2′) или разности Δt(S1′, S2′) времени прохождения между первым S1′ и вторым S2′ подготовленными сигналами. Корректировка происходит с помощью предварительно выведенной фазовой разности Δφ(R1′, R2′) или разности Δt(R1′, R2′) времени прохождения между первым R1′ и вторым R2′ подготовленными опорными сигналами. Средства 39 включают в себя в данном примере цифровой сигнальный процессор. В нем с помощью фазовой разности Δφ(R1′, R2′) или разности Δt(R1′, R2′) времени прохождения между первым R1' и вторым R2' подготовленными опорными сигналами производится корректировка подготовленных сигналов S1′, S2′ датчиков.
Преимущественно сигналы S1′, S2′ корректируются не по отдельности, а производится непосредственно корректировка нужных измеряемых величин, т.е. фазовой разности или разности времени прохождения. Фазовая разность Δφ(S1′, S2′) и разность Δt(S1′, S2′) времени прохождения между подготовленными сигналами S1′, S2′ определяются при этом, например, точно так же, как и фазовая разность Δφ(R1′, R2′) и разность Δt(R1′, R2′) времени прохождения подготовленных опорных сигналов R1′, R2′. Определение происходит преимущественно также в цифровом сигнальном процессоре.
Корректировка разности Δt(S1′, S2′) времени прохождения подготовленных сигналов S1′, S2′ происходит преимущественно по следующему правилу расчета:
Δt(S1′, S2′)kor=Δt(S1′, S2′)-Δt(R1′, R2′),
где Δt(S1′, S2′)kor - корректированная разность времени прохождения между подготовленными сигналами S1′, S2′, Δt(S1′, S2′) - измеренная разность времени прохождения между подготовленными сигналами S1′, S2′, Δt(R1′, R2′) - схемно-обусловленная разность времени прохождения между подготовленными опорными сигналами R1′, R2′.
Корректировка фазовой разности Δφ(S1′, S2′) подготовленных сигналов S1′, S2′ происходит преимущественно по следующему правилу расчета:
Δφ(S1′, S2′)kor=Δφ(S1′, S2′)-Δt(R1′, R2′) 2πfs,
где Δφ(S1′, S2′)kor - корректированная фазовая разность между подготовленными сигналами S1′, S2′, Δφ(S1′, S2′) - измеренная фазовая разность между подготовленными сигналами S1′, S2′, Δt(R1′, R2′) - схемно-обусловленная разность времени прохождения между подготовленными опорными сигналами R1′, R2′, fs - частота сигналов S1′, S2′.
Далее Кориолисов массовый расходомер включает в себя средства 39 для определения массового расхода с помощью корректированных подготовленных сигналов S1′, S2′, в частности с помощью корректированной фазовой разности Δφ(S1′, S2′)kor или корректированной разности Δt(S1′, S2′)kor времени прохождения.
Также эти средства 39 реализованы в данном примере в виде цифрового сигнального процессора. Определение массового расхода может происходить различным образом. При этом могут применяться любые известные методы определения, в которых в качестве характеристической измеряемой величины используется фазовая разность или разность времени прохождения сигналов датчиков. Определение массового расхода может происходить, например, с помощью пропорциональности между разностью времени прохождения сигналов датчиков и массовым расходом. Постоянные пропорциональности и возможные релевантные зависимости, например, от температуры или плотности жидкости являются, как правило, специфическими для прибора и могут храниться в виде калибровочных данных в приборе и при определении учитываться соответствующими алгоритмами.
Наложение опорных сигналов R может происходить по-разному. На фиг.3 и 4 изображены два примера, используемых в сочетании с изображенными на фиг.1 датчиками 21, 23 с катушками 25, 27.
В примере на фиг.3 генератор 33 опорного сигнала представляет собой управляемый напряжением осциллятор, соединенный с первым выводом 41 катушки 25 и первым выводом 43 катушки 27. Второй вывод 45 катушки 25 соединен с входом первой входной ветви 35, а второй вывод 47 катушки 27 соединен с входом второй входной ветви 37. Точно так же здесь может использоваться уже описанный в связи с фиг.2 цифровой генератор 34 опорного сигнала. Это обозначено на фиг.3 штриховыми соединительными линиями, посредством которых цифровой генератор 34 опорного сигнала через цифроаналоговый преобразователь D/A и, при необходимости, через усилитель A3 соединен с первым выводом 41 катушки 25 и первым выводом 43 катушки 27.
Эти соединения дают то преимущество, что индуктированное напряжение и напряжение опорного сигнала R накладываются друг на друга без создания опорным сигналом R потока тока через катушки 25, 27, который мог бы сказаться на колебательной характеристике измерительной трубки 3.
В примере на фиг.4 наложение вызвано за счет приданных входным ветвям 35, 37 суммирующих или дифференциальных усилителей 49, 51. Усилители 49, 51 могут быть при этом предвключены входным ветвям 35, 37 или могут быть частью последних, если используются, например, вместо усилителей A1, A2 на фиг.3. Также здесь, как и в примере на фиг.3, могут использоваться аналоговый 33 и цифровой 34 генераторы опорных сигналов. Генератор 33 соединен с опорным потенциалом, например массой или нулевой точкой схемы. Опорный сигнал R приложен к первому входу 53 приданного первой входной ветви 35 суммирующего или дифференциального усилителя 49 и к первому входу 55 приданного второй входной ветви 37 суммирующего или дифференциального усилителя 51. Катушки 25, 27 присоединены своими первыми выводами 41, 43 также к опорному потенциалу. Второй вывод 45 катушки 25 соединен с вторым входом 57 приданного первой входной ветви 35 суммирующего или дифференциального усилителя 49, а второй вывод 47 катушки 27 соединен с вторым входом 59 приданного второй входной ветви 37 суммирующего или дифференциального усилителя 51.
С помощью Кориолисова массового расходомера, как уже сказано, осуществляется способ компенсации схемно-обусловленной фазовой разности или разности времени прохождения подготовленных в отдельных входных ветвях сигналов измерительного прибора. Согласно способу, опорный сигнал накладывается параллельно, по меньшей мере, на два сигнала, и каждый из этих образованных наложением вспомогательных сигналов проходит через собственную входную ветвь. Из подготовленных во входных ветвях вспомогательных сигналов отфильтровываются соответствующий входной ветви подготовленный сигнал и соответствующий подготовленный опорный сигнал. Определяется существующая между каждыми двумя подготовленными опорными сигналами фазовая разность или разность времени прохождения. Согласно изобретению, с помощью этой фазовой разности или разности времени прохождения происходит затем компенсация фазовой разности или разности времени прохождения между каждыми двумя сигналами, подготовленными в обеих входных ветвях, в которых были подготовлены также оба опорных сигнала.
Этот способ не ограничен Кориолисовым измерением расхода. Он может применяться всегда тогда, когда желательна компенсация схемно-обусловленной фазовой разности или разности времени прохождения подготовленных в отдельных входных ветвях сигналов измерительного прибора. Такая компенсация предпочтительна всегда тогда, когда фазовая разность или разность времени прохождения является измеряемой величиной или важна для определения измеряемой величины.
Способ применим для любого числа сигналов и входных ветвей. В качестве примера здесь следует привести Кориолисовы массовые расходомеры с тремя, четырьмя или более датчиками и соответствующим числом входных ветвей. Компенсация может осуществляться тогда способом, согласно изобретению, для каждой пары из двух сигналов и соответствующих двух входных ветвей.
Схемно-обусловленная фазовая разность или разность времени прохождения зависит, как правило, от температуры и состояния отдельных деталей входных ветвей и изменяется, тем самым, медленно. Точность способа дополнительно повышается поэтому за счет того, что существующая между каждыми двумя подготовленными опорными сигналами схемно-обусловленная фазовая разность или разность времени прохождения регистрируется в течение отрезка времени, и для компенсации фазовой разности или разности времени прохождения между двумя актуально подготовленными сигналами привлекаются зарегистрированные в течение отрезка времени фазовые разности или разности времени прохождения соответствующих подготовленных опорных сигналов. Определение продолжительности отрезка времени, в течение которого регистрируются фазовые разности или разности времени прохождения, может происходить с помощью оценочных значений или, например, с помощью измерения температуры. При этом измеряется температура преимущественно в зоне входных ветвей 35, 37. Для этого в примере на фиг.2 предусмотрен температурный датчик 60, результаты измерения которого подаются к блоку 39 обработки сигналов. Если измеренная температура приблизительно постоянная, то выбирается длительный отрезок времени, а если температура изменяется, то продолжительность отрезка времени соответственно сокращается. Для этого ниже приведены два варианта.
Согласно первому варианту, существующие между каждыми двумя подготовленными опорными сигналами R1′, R2′ схемно-обусловленные фазовые разности Δϕ(R1′, R2′) или разности Δt(R1′, R2′) времени прохождения регистрируются в течение отрезка времени, и из лежащих в пределах интервала времени, следующих друг за другом значений фазовых разностей Δϕ(R1′, R2′) или разностей Δt(R1′, R2′) времени прохождения образуется среднее значение ΔФ1(R1′, R2′), ΔT1(R1′, R2′). Определение корректированных фазовых разностей или разностей времени прохождения подготовленных сигналов S1′, S2′ датчиков происходит затем, как это описано выше, причем вместо фазовой разности Δϕ(R1′, R2′) или разности Δt(R1′, R2′) времени прохождения соответствующих подготовленных опорных сигналов R1′, R2′ подставляется их среднее значение ΔФ1(R1′, R2′), ΔT1(R1′, R2′).
Согласно второму варианту, существующие между каждыми двумя подготовленными опорными сигналами R1′, R2′ схемно-обусловленные фазовые разности Δϕ(R1′, R2′) или разности Δt(R1′, R2′) времени прохождения регистрируются в течение отрезка времени за счет того, что подготовленные опорные сигналы R1′, R2′ воспринимаются в течение более длительного интервала времени, определяются долговременные значения ΔФ2(R1′, R2′), ΔТ2(R1′, R2′) фазовых разностей или разностей времени прохождения и выводится, как описано, фазовая разность или разность времени прохождения, причем, однако, включается вся записанная в течение интервала времени серия подготовленных опорных сигналов R1′, R2′. Определение корректированных фазовых разностей или разностей времени прохождения подготовленных сигналов S1′, S2′ датчиков происходит затем, как это описано выше, причем вместо фазовой разности Δϕ(R1′, R2′) или разности Δt(R1′, R2′) времени прохождения соответствующих подготовленных опорных сигналов R1′, R2′ подставляется соответствующее долговременное значение ΔФ2(R1′, R2′), ΔТ2(R1′, R2′).
Дальнейшее повышение точности способа достигается за счет того, что учитывается частотная зависимость характера передачи входных ветвей. Этот улучшенный способ более подробно поясняется ниже на примере описанного выше Кориолисова массового расходомера. На фиг.5 изображен пример соответствующей схемы.
Используются два или более опорных сигналов Rx, Ry, Rz разной частоты fRх, fRy, fRz. Опорные сигналы Rx, Ry, Rz могут последовательно вводиться через соответствующий блок управления генератора 33 на фиг.3. В качестве альтернативы, как показано на фиг.5, они могут формироваться одновременно посредством соответствующего числа генераторов 33х, 33у, 33z и накладываться на сигналы S1, S2 датчиков. Как и в предыдущих примерах, здесь также могут использоваться цифровые генераторы 34, чьи цифровые опорные сигналы Rd через цифроаналоговые преобразователи D/A и, при необходимости, усилители A3 преобразуются в аналоговые опорные сигналы Rx, Ry, Rz. Этот вариант изображен на фиг.5 штриховыми линиями. При этом цифровой генератор 34 или генераторы 34 интегрирован/интегрированы в сигнальный процессор 39. За счет наложения образуются вспомогательные сигналы H1, Н2, которые проходят через соответствующие входные ветви 35, 37. Затем для каждого опорного сигнала Rx, Ry, Rz определяется фазовая разность или разность времени прохождения Δt(Rx1, Rx2), Δφ(Rx1, Rx2), Δt(Ry1, Ry2), Δφ(Ry1, Ry2), Δt(Rz1, Rz2), Δφ(Rz1, Rz2) соответствующих подготовленных опорных сигналов Rx1, Rx2, Ry1, Ry2, Rz1,Rz2.
Для этого в распоряжении также имеются средства, которые вызывают разделение подготовленных вспомогательных сигналов Н1′, Н2′ на отдельные составляющие. Например, на выходе каждой входной ветви 35, 37 имеются фильтры FS1, FS2 для подготовленных сигналов S1′, S2′ датчиков и фильтры FRx1, FRx2, FRy1, FRy2, FRz1, FRz2 для подготовленных опорных сигналов Rx1, Rx2, Ry1, Ry2, Rz1, Rz2. Определение фазовых разностей или разностей времени прохождения Δt(Rx1, Rx2), Δφ(Rx1, Rx2), Δt(Ry1, Ry2), Δφ(Ry1, Ry2), Δt(Rz1, Rz2), Δφ(Rz1, Rz2) соответствующих подготовленных опорных сигналов Rx1, Rx2, Ry1, Ry2, Rz1, Rz2 происходит так же, как описанное выше определение фазовых разностей Δφ(R1′, R2′) или разностей Δt(R1′, R2′) времени прохождения.
С помощью полученных фазовых разностей или разностей времени прохождения Δt(Rx1, Rx2), Δφ(Rx1, Rx2), Δt(Ry1, Ry2), Δφ(Ry1, Ry2), Δt(Rz1, Rz2), Δφ(Rz1, Rz2) подготовленных пар опорных сигналов Rx1, Rx2, Ry1, Ry2, Rz1, Rz2 определяется частотная зависимость обусловленной входными ветвями 35, 37 фазовой разности Δφ(f) или разности Δt(f) времени прохождения. На фиг.6 обусловленная входными ветвями 35, 37 разность Δt(f) времени прохождения изображена как функция частоты f, причем полученные с помощью отдельных опорных сигналов Rx, Ry, Rz разности Δt(Rx1, Rx2), Δt(Ry1, Ry2), Δt(Rz1, Rz2) времени прохождения нанесены в виде измерительных точек. Кривая имеет в низкочастотной области приблизительно постоянную характеристику и убывает в сторону более высоких частот.Частотная зависимость обусловленной входными ветвями 35, 37 разности Δt(f) времени прохождения может быть определена, например, за счет согласования полинома с измерительными точками. С помощью такого полинома ниже определяется ожидаемая разность Δt(f) времени прохождения для любых частот, в частности для частоты fs сигналов S1, S2 датчиков, в окружении частот fRx, fRy, fRz измерительных точек.
При использовании только двух разных опорных сигналов, например Rx, Ry, частотная зависимость обусловленной входными ветвями 35, 37 разности Δt(f) времени прохождения может определяться, например, посредством интерполяции. Преимущественно в этом случае частоты fRx, fRy, fRz выбираются так, что одна выше, а другая ниже частоты fs сигналов S1, S2 датчиков. Также за счет этого ниже определяется ожидаемая разность Δt(f) времени прохождения для любых частот, в частности для частоты fs сигналов S1, S2 датчиков, в окружении частот tRx, fRy измерительных точек.
Затем осуществляется компенсация фазовой разности Δφ(S1′, S2′) или разности Δt(S1′, S2′) времени прохождения подготовленных сигналов S1′, S2′ датчиков, при которой учитываются как частота fs сигналов S1, S2, так и частотная зависимость обусловленной входными ветвями разности Δt(f) времени прохождения.
Для этого, например, корректированная разность Δt(S1′, S2′)kor времени прохождения подготовленных сигналов S1′, S2′ датчиков определяется по следующему правилу расчета:
Δt(S1′, S2′)kor=Δt(S1′, S2′)-Δt(fs)
где Δt(S1′, S2′)kor - корректированная разность времени прохождения между подготовленными сигналами S1′, S2′ датчиков, Δt(S1′, S2′) - измеренная разность времени прохождения между подготовленными сигналами S1′, S2′ датчиков, Δt(fs) - схемно-обусловленная, частотно-зависимая, определенная с помощью опорных сигналов Rx, Ry, Rz или Rx, Ry разность Δt(f) времени прохождения при частоте fs сигналов S1, S2, а fs - частота сигналов S1, S2.
Аналогичным образом корректированная фазовая разность Δφ(S1′, S2′)kor подготовленных сигналов S1′, S2′ датчиков определяется по следующему правилу расчета:
Δφ(S1′, S2′)kor=Δφ(S1′, S2′)-Δt(S1′, S2′)-Δt(fs)2πfs
где Δφ(S1′, S2′)kor - корректированная фазовая разность между подготовленными сигналами S1′, S2′ датчиков, Δφ(S1′, S2′) - измеренная фазовая разность между подготовленными сигналами S1′, S2′ датчиков, Δt(fs) - схемно-обусловленная, частотно-зависимая, выведенная с помощью опорных сигналов Rx, Ry, Rz или Rx, Ry разность Δt(f) времени прохождения при частоте fs сигналов S1, S2, а fs - частота сигналов S1, S2.
Совершенно аналогичным образом определяется частотная зависимость обусловленной входными ветвями 35, 37 фазовой разности Δφ(f), с помощью которой аналогичным образом осуществляется компенсация фазовой разности Δφ(S1′, S2′) или разности Δt(S1′, S2′) времени прохождения подготовленных сигналов S1′, S2′ датчиков, при которой учитываются как частота fs сигналов S1, S2, так и частотная зависимость обусловленной входными ветвями фазовой разности Δφ(f).
Преимущественно с помощью опорных сигналов регистрируется характер передачи входных ветвей 35, 37 не только в отношении фазы и времени прохождения, но и в отношении амплитуды. Знание характера передачи входной схемы в отношении амплитуды имеет особое преимущество, например, тогда, когда измерительным прибором определяется дополнительно вязкость жидкости.
Если для регистрации характера передачи в отношении амплитуды используется только один опорный сигнал R, то его амплитуда сравнивается с амплитудами AR1, АR2 соответствующих опорных сигналов R1, R2 и на этой основе определяется коэффициент V1, V2 усиления, который учитывается при дальнейшей обработке подготовленных сигналов S1′, S2′ датчиков. Как правило, при этом достаточно рассматривать амплитуды максимумов отдельных сигналов. Коэффициенты V1, V2 усиления определяются преимущественно в цифровом сигнальном процессоре 39 за счет определения амплитуд максимумов и расчета на этой основе коэффициентов V1, V2 усиления. Таким образом, следует:
V1=AR1/AR
V2=AR2/AR
где V1 - коэффициент усиления первой входной ветви 35, V2 - коэффициент усиления второй входной ветви 37, AR1 - амплитуда подготовленного в первой входной ветви 35 опорного сигнала R1, АR2 - амплитуда подготовленного во второй входной ветви 37 опорного сигнала R2, a AR - амплитуда опорного сигнала R.
Корректировка амплитуд AS1′, AS2′ подготовленных сигналов S1', S2' датчиков происходит, например, за счет умножения соответствующих подготовленных сигналов S1′, S2′ на обратное значение соответствующего коэффициента V1, V2 усиления.
Аналогично приведенным рассуждениям в отношении фаз или времени прохождения также здесь с помощью двух или более опорных сигналов разной частоты можно определить частотную зависимость коэффициентов V1, V2 усиления и, соответственно, учитывать при корректировке.
Если, по меньшей мере, одна из входных ветвей 35, 37 содержит в качестве усилителя A1, A2 усилитель с регулируемым коэффициентом усиления, то его можно регулировать в соответствии с определенными коэффициентами V1, V2 усиления так, что обе входные ветви 35, 37 будут обеспечивать одинаковое усиление.
В описанных вариантах осуществления изобретения всегда используются вспомогательные сигналы H1, Н2, образованные наложением сигналов S1, S2 датчиков на опорный сигнал R, Rx, Ry, Rz. Однако можно определить схемно-обусловленную фазовую разность или разность времени прохождения между подготовленными в отдельных входных ветвях сигналами датчиков Кориолисова массового расходомера в отсутствие сигналов датчиков.
Это может осуществляться, например, посредством изображенных на фиг.2 или 5 схем за счет отключения датчиков 21, 23. Это, например, тот случай, когда измерительный преобразователь 1 еще не подключен к схеме или колебания не возбуждаются. В качестве альтернативы может быть введен выключатель, посредством которого подключаются датчики 21, 23.
В этом способе, по меньшей мере, один опорный сигнал R подается параллельно к двум входным ветвям 35, 37, и определяется существующая на выходе обеих входных ветвей 35, 37 между подготовленными опорными сигналами R1, R2 фазовая разность или разность времени прохождения. Как уже сказано выше, на этой основе выводится ожидаемая для сигналов датчиков, вызванная входными ветвями фазовая разность или разность времени прохождения.
Названный последним способ может применяться для тестирования наличия и функциональности всей входной схемы массового расходомера независимо от измерительного преобразователя 1 и диагностики состояния и/или создания сообщения об ошибке.
В Кориолисовой технике измерения расхода колебания содержащей измерительную трубку 3 колебательной системы возбуждаются преимущественно с ее резонансной частотой. Для этого, как правило, предусмотрен регулирующий контур, через который датчики 23, 25 соединены с возбудителем 15 колебаний. Это происходит, например, как показано на фиг.2, за счет подачи подготовленного сигнала S1' к цифроаналоговому преобразователю D/A2. Выходное напряжение преобразователя D/A2 преобразуется посредством преобразователя напряжение-ток U/I в ток I, который через регулируемый усилитель А4 подается в качестве тока Ierr возбуждения к возбудителю 15 колебаний. Протекающий через катушку 19 возбудителя 15 колебаний ток Ierr возбуждения вызывает колебание колебательной системы, воспринимаемое датчиками 21, 23 и входными ветвями 35, 37. Для достижения резонанса требуется правильная по фазе обратная связь. Это достигается, например, за счет соответствующей настройки времени задержки между приемом сигналов S1, S2 датчиков и их обратной связью с возбудителем 15 колебаний. Время задержки достигается преимущественно в цифровом сигнальном процессоре 39 за счет задержки дальнейшей передачи. Предпочтительным образом время задержки определяется с помощью времени прохождения, которое требуется сигналам, чтобы пройти через весь регулирующий контур от процессора 39 через цифроаналоговый преобразователь D/A2, возбудитель 15 колебаний, датчики 21, 23, входные ветви 35, 37 обратно к процессору 39.
При этом время Т прохождения, которое требуется сигналам S1, S2 для прохождения через входные ветви 35, 37, представляет собой предварительно не известную, как правило, и переменную величину. Время Т прохождения можно очень точно определить с помощью опорных сигналов. Это более подробно поясняется ниже с помощью примера на фиг.2. Для этого посредством цифрового генератора 34 формируется короткая серия RS опорных сигналов, которая через цифровой сигнальный процессор 39 подается к цифроаналоговому преобразователю D/A. При этом в процессоре 39 регистрируется момент посылки серии RS опорных сигналов. Это может происходить, например, таким образом, что вместе с посылкой запускается измерение времени. Серия RS опорных сигналов проходит через входные ветви 35, 37 и снова попадает в процессор 39. Момент возврата серии RS сигналов регистрируется в процессоре 39, и измерение времени заканчивается. С помощью разности времени между посылкой и возвратом серии RS сигналов определяется искомое время Т прохождения, которое может определяться отдельно для каждой входной ветви 35, 37.
Перечень ссылочных позиций
1 - измерительный преобразователь
3 - измерительная трубка
5 - концевая пластина
7 - фланец
9 - концевая пластина
11 - фланец
13 - несущая труба
15 - возбудитель колебаний
17 - постоянный магнит
19 - катушка
21 - датчик
23 - датчик
25 - катушка
27 - катушка
29 - постоянный магнит
31 - постоянный магнит
33 - генератор опорного сигнала
35 - входная ветвь
37 - входная ветвь
39 - цифровой сигнальный процессор
41 - первый вывод
43 - первый вывод
45 - второй вывод
47 - второй вывод
49 - дифференциальный усилитель
51 - дифференциальный усилитель
53 - первый вход
55 - первый вход
57 - второй вход
59 - второй вход
Изобретение предназначено для компенсации ошибок передачи входной схемы Кориолисова расходомера. На первый и второй сигналы (S1,S2) датчиков колебаний измерительной трубки расходомера с помощью по меньшей мере одного генератора (33, 34) одновременно накладывают опорный сигнал (R). Из подготовленных во входных ветвях (35, 37) вспомогательных сигналов (Н1′, Н2′) отфильтровывают соответственно подготовленные первый и второй сигналы (S1′, S2′) датчиков и соответственно подготовленные опорные сигналы (R1′, R2′). Определяют существующую между каждыми двумя подготовленными опорными сигналами (R1′, R2′) фазовую разность или разность времени прохождения (Δφ(R1′, R2′), Δt(R1′, R2′))и с помощью этой фазовой разности или разности времени прохождения (Δφ(R1′, R2′), Δt(R1′, R2′)) осуществляют компенсацию фазовой разности или разности времени прохождения (Δφ(S1′, S2′), Δt(S1′, S2′)) между двумя сигналами (S1′, S2′) датчиков, подготовленными в обеих входных ветвях (35, 37). В варианте осуществления используют два или более опорных сигналов (Rx, Ry, Rz) разной частоты. Изобретение обеспечивает повышение точности измерения. 4 н. и 7 з.п. ф-лы, 6 ил.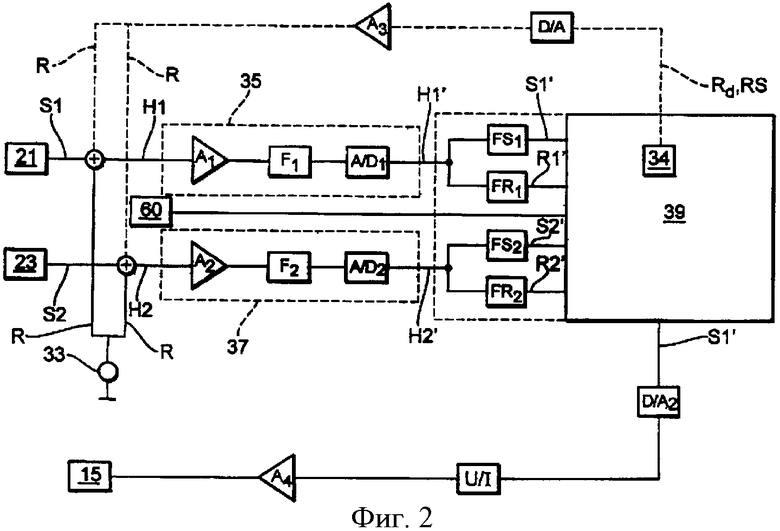
1. Кориолисов массовый расходомер, содержащий измерительную трубку (3), выполненную с возможностью возбуждения в ней колебания в измерительном режиме и протекания через нее среды, чей массовый расход должен быть измерен, первый (21) и второй (23) датчики для регистрации зависимого от массового расхода колебания измерительной трубки (3) и для формирования первого (S1) и второго (S2) сигналов датчиков, по меньшей мере, один генератор (33, 33х, 33у, 33z, 34) опорных сигналов, выполненный с возможностью наложения на первый (S1) и второй (S2) сигналы датчиков одного и того же опорного сигнала (R, Rx, Ry, Rz), первую входную ветвь (35) для подготовки первого вспомогательного сигнала (H1), образованного первым сигналом (S1) датчика и наложенным опорным сигналом (R, Rx, Ry, Rz), вторую входную ветвь (37) для подготовки второго вспомогательного сигнала (Н2), образованного вторым сигналом (S2) датчика и наложенным опорным сигналом (R, Rx, Ry, Rz), средства для отфильтровывания из подготовленного первого вспомогательного сигнала (Н1′) подготовленного первого сигнала (S1′) датчика и подготовленного первого опорного сигнала (R1′, Rx1, Ry1, Rz1), средства для отфильтровывания из подготовленного второго вспомогательного сигнала (Н2′) подготовленного второго сигнала (S2′) датчика и подготовленного второго опорного сигнала (R2′, Rx2, Ry2, Rz2), средства (39) для определения фазовой разности или разности времени прохождения (Δφ(R1′, R2′), Δt(R1′, R2′); Δφ(Rx1, Rx2), Δt(Rx1, Rx2); Δφ(Ry1, Ry2), Δt(Ry1, Ry2); (Δφ(Rz1, Rz2), Δt(Rz1, Rz2)) между первым (R1′, Rx1, Ry1, Rz1) и вторым (R2′, Rx2, Ry2, Rz2) подготовленными опорными сигналами, средства (39) для корректировки фазовой разности или разности времени прохождения (Δφ(S1′, S2′), Δt(S1′, S2′)) между первым (S1′) и вторым (S2′) подготовленными сигналами датчиков с помощью фазовой разности или разности времени прохождения (Δφ(R1′, R2′), Δt(R1′, R2′); Δφ(Rx1, Rx2), Δt(Rx1, Rx2); Δφ(Ry1, Ry2), Δt(Ry1, Ry2); Δφ(Rz1, Rz2), Δt(Rz1, Rz2)) между первым и вторым подготовленными опорными сигналами (R1′, Rx1, Ry1, Rz1, R2′, Rx2, Ry2, Rz2) и средства (39) для определения массового расхода с помощью корректированных подготовленных сигналов датчиков.
2. Расходомер по п.1, характеризующийся тем, что средства для отфильтровывания из подготовленного первого вспомогательного сигнала (Н1′) подготовленного первого сигнала (S1′) датчика и подготовленного первого опорного сигнала (R1′, Rx1, Ry1, Rz1) и средства для отфильтровывания из подготовленного второго вспомогательного сигнала (Н2′) подготовленного второго сигнала (S2′) датчика и подготовленного второго опорного сигнала (R2′, Rx2, Ry2, Rz2) содержат два идентичных комплекта, по меньшей мере, по два фильтра (FS1, FR1, FRx1, FRy1, FRz1; FS2, FR2, FRx2, FRy2, FRz2), из которых первый (FS1, FR1, FRx1, FRy1, FRz1) служит для отфильтровывания из подготовленного первого вспомогательного сигнала (Н1′) подготовленного первого сигнала (S1′) датчика и подготовленного первого опорного сигнала (R1′, Rx1, Ry1, Rz1), а второй (FS2, FR2, FRx2, FRy2, FRz2) - для отфильтровывания из подготовленного второго вспомогательного сигнала (Н2′) подготовленного второго сигнала (S2′) датчика и подготовленного второго опорного сигнала (R2′, Rx2, Ry2, Rz2).
3. Расходомер по п.1, характеризующийся тем, что входные ветви (35, 37) содержат усилитель (A1, A2) и аналого-цифровой преобразователь (A/D1, A/D2), а фильтры (FS1, FR1, FRx1, FRy1, FRz1; FS2, FR2, FRx2, FRy2, FRz2) являются цифровыми фильтрами.
4. Расходомер по п.1, характеризующийся тем, что генератор (33, 33х, 33у, 33z) опорных сигналов выполнен в виде генератора напряжения или цифрового генератора (34) опорных сигналов, а каждый опорный сигнал (R, Rx, Ry, Rz) представляет собой осциллирующее напряжение заданной частоты (fR, fRx, fRy, fRz).
5. Расходомер по п.1, характеризующийся тем, что датчики (21, 23) содержат по одной катушке (25, 27), причем генератор (33, 34) опорных сигналов соединен с первым выводом (41) катушки (25) и с первым выводом (43) катушки (27), а второй вывод (45) катушки (25) соединен с входом первой входной ветви (35), а второй вывод (47) катушки (27) - с входом второй входной ветви (37).
6. Способ компенсации фазовой разности или разности времени прохождения (Δφ(S1′, S2′)) подготовленных в отдельных входных ветвях (35, 37) сигналов (S1, S2), датчиков кориолисова массового расходомера, при котором опорный сигнал (R, Rx, Ry, Rz) накладывают параллельно на все сигналы (S1, S2) датчиков, каждый из этих образованных наложением вспомогательных сигналов (H1, H2) проходит через собственную входную ветвь (35, 37), из подготовленных во входных ветвях (35, 37) вспомогательных сигналов (Н1′, H2') отфильтровывают соответствующий входной ветви (35, 37) подготовленный сигнал (S1′, S2′) датчика и соответствующий подготовленный опорный сигнал (R1′, R2′; Rx1, Rx2; Ry1, Ry2; Rz1, Rz2), определяют существующую между каждыми двумя подготовленными опорными сигналами (R1′, R2′; Rx1, Rx2; Ry1, Ry2; Rz1, Rz2) фазовую разность или разность времени прохождения (Δφ(R1′, R2′), Δt(R1′, R2′); Δφ(Rx1, Rx2), Δt(Rx1, Rx2); Δφ(Ry1, Ry2), Δt(Ry1, Ry2); Δφ(Rz1, Rz2), Δt(Rz1, Rz2)) и с помощью этой фазовой разности или разности времени прохождения (Δφ(R1′, R2′), Δt(R1′, R2′); Δφ(Rx1, Rx2), Δt(Rx1, Rx2); Δφ(Ry1, Ry2), Δt(Ry1, Ry2); Δφ(Rz1, Rz2), Δt(Rz1, Rz2)) осуществляют компенсацию фазовой разности или разности времени прохождения (Δφ(S1′, S2′), Δt(S1′, S2′)) между двумя сигналами (S1′, S2′) датчиков, подготовленными в обеих входных ветвях (35, 37), в которых были подготовлены также оба опорных сигнала (R1′, R2′; Rx1, Rx2; Ry1, Ry2; Rz1, Rz2).
7. Способ по п.6, характеризующийся тем, что существующую между каждыми двумя подготовленными опорными сигналами (R1′, R2′; Rx1, Rx2; Ry1, Ry2; Rz1, Rz2) фазовую разность или разность времени прохождения (Δφ(R1′, R2′), Δt(R1′, R2′); Δφ(Rx1, Rx2), Δt(Rx1, Rx2); Δφ(Ry1, Ry2), Δt(Ry1, Ry2); Δφ(Rz1, Rz2), Δt(Rz1, Rz2)) регистрируют в течение отрезка времени и для компенсации фазовой разности или разности времени прохождения (Δφ(S1′, S2′), Δt(S1′, S2′)) между двумя актуально подготовленными сигналами (Sl', S2') датчиков привлекают зарегистрированные в течение отрезка времени фазовые разности или разности времени прохождения (Δφ(R1′, R2′), Δt(R1′, R2′); Δφ(Rx1, Rx2), Δt(Rx1, Rx2); Δφ(Ry1, Ry2), Δt(Ry1, Ry2); Δφ(Rz1, Rz2), Δt(Rz1, Rz2)) соответствующих опорных сигналов (R1′, R2′; Rx1, Rx2; Ry1, Ry2; Rz1, Rz2).
8. Способ по п.7, характеризующийся тем, что используют два или более опорных сигналов (Rx, Ry, Rz) разной частоты, для каждого опорного сигнала определяют фазовую разность или разность времени прохождения (Δφ(R1′; R2′), Δt(R1′, R2′); Δφ(Rx1, Rx2), Δt(Rx1, Rx2); Δφ(Ry1, Ry2), Δt(Ry1, Ry2); Δφ(Rz1, Rz2), Δt(Rz1, Rz2)) соответствующих подготовленных опорных сигналов (Rx1, Rx2, Ry1, Ry2, Rz1, Rz2), определяют частотную зависимость (Δφ(f), Δt(f)) обусловленных входными ветвями (35, 37) фазовых разностей или разностей времени прохождения (Δφ(R1′, R2′), Δt(R1′, R2′); Δφ(Rx1, Rx2), Δt(Rx1, Rx2); Δφ(Ry1, Ry2), Δt(Ry1, Ry2); Δφ(Rz1, Rz2), Δt(Rz1, Rz2)) между парами подготовленных опорных сигналов (Rx1, Rx2, Ry1, Ry2, Rz1, Rz2) и при компенсации учитывают частоту (fs) сигналов (S1, S2) датчиков и частотную зависимость обусловленных входными ветвями (35, 37) фазовых разностей или разностей времени прохождения (Δφ(f), Δt(f)).
9. Способ по п.6, характеризующийся тем, что амплитуду (AR) опорного сигнала (R) сравнивают с амплитудами (AR1, AR2) соответствующих подготовленных опорных сигналов (R1′, R2′) и на этой основе для каждой входной ветви (35, 37) определяют коэффициент (V1, V2) усиления, учитываемый при дальнейшей обработке подготовленных сигналов (S1′, S2′) датчиков.
10. Способ определения схемно-обусловленной фазовой разности или разности времени прохождения между подготовленными в отдельных входных ветвях (35, 37) сигналами (S1, S2) датчиков или диагностики состояния измерительного прибора, при котором опорный сигнал (R) подают параллельно к двум входным ветвям (35, 37), определяют фазовую разность или разность времени прохождения (Δφ(R1′, R2′), Δt(R1′, R2′), существующую на выходе обеих входных ветвей (35, 37) между подготовленными опорными сигналами (R1′, R2′), и на этой основе выводят ожидаемую для сигналов (S1, S2) датчиков вызванную входными ветвями (35, 37) фазовую разность или разность времени прохождения.
11. Способ определения времени (Т) прохождения, которое требуется сигналу (S1, S2) датчика кориолисова массового расходомера по п.1 для прохождения через входную ветвь (35, 37), при котором с помощью генератора (34) опорных сигналов создают серию (RS) опорных сигналов, проходящую через входную ветвь (35, 37), и измеряют необходимое для этого время прохождения.
| Устройство для бурения скважин (его варианты) | 1984 |
|
SU1229309A1 |
| US 6332366 В1, 25.12.2001 | |||
| СПОСОБ И УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ МАССОВОГО РАСХОДА МАТЕРИАЛА В МАССОВОМ РАСХОДОМЕРЕ КОРИОЛИСА | 1996 |
|
RU2155325C2 |
| Способ окисления боковых цепей ароматических углеводородов и их производных в кислоты и альдегиды | 1921 |
|
SU58A1 |

