Изобретение относится к геофизическому оборудованию, а именно к бескабельным телеметрическим устройствам регистрации сейсмических колебаний грунта с последующей записью полученных данных при проведении сейсморазведочных работ или сейсмологических исследований.
ПРЕДШЕДСТВУЮЩИЙ УРОВЕНЬ ТЕХНИКИ
Сейсморазведочные работы или сейсмологические исследования проводят с помощью группы сейсмических приемников, располагаемых на исследуемой площади, и могут в среднем содержать 1000 - 100000 сейсмических приемников. Управляемый сейсмический источник упругой волны (например, взрывной, вибрационный, импульсный, пневматический и другие виды источников упругих волн) приводится в действие внутри такой расстановки сейсмических приемников, и возникающие в результате сейсмические волны распространяются во все стороны от источника возбуждения упругих колебаний, проникают в толщу недр земной коры на большую глубину. Сейсмические волны проходя через недра претерпевают преломление, поглощение и отражение и частично возвращаются к поверхности земли, где создаваемые ими колебания регистрируются на поверхности сейсмическими приемниками и используются для получения и изучения сейсмогеологического разреза исследуемого участка недр.
Из предшествующего уровня техники известно бескабельное устройство регистрации сейсмических данных (Патент на полезную модель RU199415 “Бескабельное устройство регистрации сейсмических данных”), использующее в своей конструкции молекулярно-электронный датчик в качестве сейсмического сенсора. Этот тип датчиков является параметрическим и для своего функционирования требует наличие источника питания. Это увеличивает суммарную мощность потребления устройства в целом, и, тем самым, уменьшает время непрерывной регистрации в сравнении с использованием в конструкции электродинамических датчиков. В этом известном решении не предусмотрен механизм экономии заряда источника питания посредством выключения по меньшей мере части его компонентов.
Наличие температурной зависимости чувствительности молекулярно-электронных датчиков, в известном решении так же ограничивает возможность их применения в широком диапазоне температур (при температуре ниже минус 20-25 градусов замерзает рабочая жидкость молекулярно-электронного датчика). В конструкции этого известного прибора не применяются решения для компенсации ухода частоты тактового генератора аналого-цифрового преобразователя с учетом изменений температуры. Также в этом известном решении не предусмотрен контроль за правильностью установки устройства на исследуемой поверхности, например, прибор после установки в поле может накрениться, вследствие чего будут получены некорректные данные измерений, либо физически невозможно будет получить сигналы с помощью Глобальных Навигационных Спутниковых Систем (GNSS). При отсутствии сигнала, получаемого с помощью Глобальных Навигационных Спутниковых Систем (GNSS), вызванного как природными (геофизическими/климатическими) так и техногенными помехами, например, неправильной ориентацией (наклон прибора), экранированием антенны спутникового приемника, наличием естественных осадков, спутниковый сигнал не сможет достичь приемника в приборе, что приведет к наличию ошибок в измерениях и к невозможности синхронизации сейсмических данных при обработке. Также в этом известном решении не предусмотрен контроль за состоянием электронных компонентов в устройстве, например, отсутствием свободной памяти в устройстве, неполной зарядки источника питания, и др.
Также известен сейсмический датчик (Патент на изобретение EA №39047 Сейсмический датчик), использующий в своей конструкции ряд технических решений, имеющих определенные ограничения, а именно: модуль приёмопередатчика построен на свето/фото диодах, работающих в видимом или инфракрасном диапазоне электромагнитного спектра с целью обмена данными. Данная конструкция очень чувствительна к чистоте оптических поверхностей корпуса датчика, что требует дополнительных операционных расходов при эксплуатации (специальная отчистка корпуса датчика от загрязнений перед процедурой считывания и зарядки). Так же, в данном варианте исполнения, этот вид обмена данными не является дистанционным (требует непосредственного контакта приёмника и передатчика) и является низкоскоростным интерфейсом по сравнению с Wi-Fi. Устройство беспроводной зарядки с использованием цилиндрической катушки нерезонансного типа имеет низкий КПД, что приводит к существенному перерасходу электроэнергии на зарядку встроенных аккумуляторов. Технология включения сейсмического датчика требует наличия специализированного внешнего устройства при непосредственном физическом контакте, что накладывает ограничение на технологию работы с данным устройством. В настоящем изобретении включение всего прибора или его компонентов осуществляется без использования внешних устройств, а именно изменением положения устройства в пространстве.
Преимущества предложенного изобретения относительно вышеуказанного известного датчика состоит в том, что передача данных от сейсмического регистратора происходит по средствам Wi-Fi, что не требует специальной отчистки корпуса регистратора от загрязнений, в сейсмическом сенсоре используется более надежная конструкция с применением электродинамических сенсоров, что позволяет повысить класс точности регистрации данных, сейсмический регистратор не требует регулярной поверки, что также в свою очередь сокращает операционные расходы на проведение полевых работ и обслуживание сейсмического оборудования.
В конструкции этого известного прибора не применяются решения для компенсации ухода частоты тактового генератора аналого-цифрового преобразователя с учетом изменений температуры. Также в этом известном решении не предусмотрен контроль за правильностью установки устройства на исследуемой поверхности, например, прибор после установки в поле может накрениться, вследствие чего будут получены некорректные данные измерений, либо физически невозможно будет получить сигналы с помощью Глобальных Навигационных Спутниковых Систем (GNSS). Также в известном решении отсутствует механизм корректировки показаний прибора с учетом уровня естественных шумов, что приводит к получению неверных показаний. При отсутствии сигнала, получаемого с помощью Глобальных Навигационных Спутниковых Систем (GNSS), вызванного, например, неправильной ориентацией (наклон прибора), экранированием антенны спутникового приемника, наличием естественных осадков, спутниковый сигнал не сможет достичь приемника в приборе, что приведет к наличию ошибок в измерениях и к невозможности синхронизации сейсмических данных при обработке. Также в этом известном решении не предусмотрен контроль за состоянием электронных компонентов в устройстве, например, отсутствием свободной памяти в устройстве, неполной зарядки источника питания, и др.
Наиболее близким к заявляемому является устройство автономной регистрации сейсмических данных RU215581, использующее в своей конструкции подпружиненные открытые контакты, расположенные на крышке корпуса для обеспечения заряда внутренней батареи и для считывания данных из памяти устройства с использованием протокола Ethernet. Использование любого типа разъёмов, особенно открытых, как в приведенном патенте, предусматривает их постоянное обслуживание (очистку контактов от механических загрязнений и химических окислов каждый раз перед подключением зарядки / считывания данных). Это требует дополнительных операционных затрат, в том числе, и временных на обслуживание оборудования, и сказывается на надёжности эксплуатации, особенно если оборудование выполняется в герметичном варианте исполнения по IP68. Использование в конструкции простой схемы включения питания устройства посредством поднесения магнита к корпусу устройства может приводить к случайным срабатываниям, учитывая методы хранения, транспортировки и расстановки данных устройств. Преимущества предложенной полезной модели устройства автономной регистрации сейсмических данных относительно вышеуказанного датчика состоит в том, что в конструкции не используются внешние контакты, требующие постоянного обслуживания. Кроме того, за счет исключения применения магнитов для включения регистратора исключен риск случайного срабатывания регистратора, его включения и разрядки батареи. В предложенном изобретении включение/выключение по меньшей мере части компонентов устройства производится посредством закодированной комбинации движений, что исключает риски случайного включения устройства и позволяет экономить заряд источника питания.
В конструкции этого известного прибора не применяются решения для компенсации ухода частоты тактового генератора аналого-цифрового преобразователя с учетом изменений температуры. Также в этом известном решении не предусмотрен контроль за правильностью установки устройства на исследуемой поверхности, например, прибор после установки в поле может накрениться, вследствие чего будут получены некорректные данные измерений, либо физически невозможно будет получить сигналы с помощью Глобальных Навигационных Спутниковых Систем (GNSS). Также в известном решении отсутствует механизм корректировки показаний прибора с учетом уровня естественных шумов, что приводит к получению неверных показаний. При отсутствии сигнала, получаемого с помощью Глобальных Навигационных Спутниковых Систем (GNSS), вызванного, например, неправильной ориентацией (наклон прибора), экранированием антенны спутникового приемника, наличием естественных осадков, спутниковый сигнал не сможет достичь приемника в приборе, что приведет к наличию ошибок в измерениях и к невозможности синхронизации сейсмических данных при обработке. Также в этом известном решении не предусмотрен контроль за состоянием электронных компонентов в устройстве, например, отсутствием свободной памяти в устройстве, неполной зарядки источника питания, и др.
Соответственно в уровне техники имеется необходимость в создании устройства автономной регистрации сейсмических данных, позволяющего повысить уровень достоверности полученных измерений сейсмического сигнала; исключить ошибки, вызванные некорректной установкой сейсмического регистратора в местоположении проведения измерений; ошибки, обусловленные недоступностью сигналов, получаемых с помощью Глобальных Навигационных Спутниковых Систем (GNSS); ошибки, обусловленные наличием естественных шумов в местоположении проведения измерений; ошибки, обусловленные изменениями температуры при проведении измерений; ошибки, вызванные отказом электронных компонентов устройства.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
С целью преодоления вышеуказанных недостатков решений известных из уровня техники предложено устройство автономной регистрации сейсмических данных, содержащее корпус, в котором размещены по меньшей мере электронные компоненты, содержащие: по меньшей мере одно средство получения внешних меток точного времени; сейсмический датчик, выполненный с возможностью регистрации сейсмических колебаний-отражений от подповерхностных структур, в ответ на возбуждение сейсмического источника, и формирования сигнала, характеризующего сейсмические колебания, аналого-цифровой преобразователь, выполненный с возможностью преобразования аналогового сигнала, полученного сейсмическим датчиком в цифровые значения сейсмического сигнала; акселерометр, выполненный с возможностью регистрации сигналов изменения положения устройства в пространстве; датчик температуры, выполненный с возможностью измерения температуры; микроконтроллер, выполненный с возможностью получения и обработки зарегистрированных сигналов от по меньшей мере одного из средства получения внешних меток точного времени, аналого-цифрового преобразователя, акселерометра, датчика температуры; и задания номеров отсчета измерений аналогового сигнала, полученного сейсмическим датчиком; энергонезависимую память, выполненную с возможностью сохранения по меньшей мере значений сигналов средства получения внешних меток точного времени, аналого-цифрового преобразователя, акселерометра, датчика температуры; причем микроконтроллер дополнительно выполнен с возможностью управления записью в энергонезависимую память файла данных с телеметрией, содержащего: последовательность цифровых значений сейсмического сигнала; последовательность данных телеметрии, содержащих: номер отсчета измерений аналогового сигнала, полученного сейсмическим датчиком, в который была получена внешняя метка точного времени; метки отклонения зарегистрированных значений сигналов акселерометра от заранее заданных пороговых значений сигналов акселерометра с указанием внешних меток точного времени, в которые были зарегистрированы отклонения, зарегистрированные значения датчика температуры; метки статуса состояния электронных компонентов устройства подключённых к микроконтроллеру средства связи, выполненные с возможностью передачи по меньшей мере файла данных с телеметрией и метки статуса состояния электронных компонентов устройства и приёма по меньшей мере команд управления и сигналов синхронизации.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Далее варианты осуществления заявленного изобретения описываются более подробно, посредством чертежей, на которых показано:
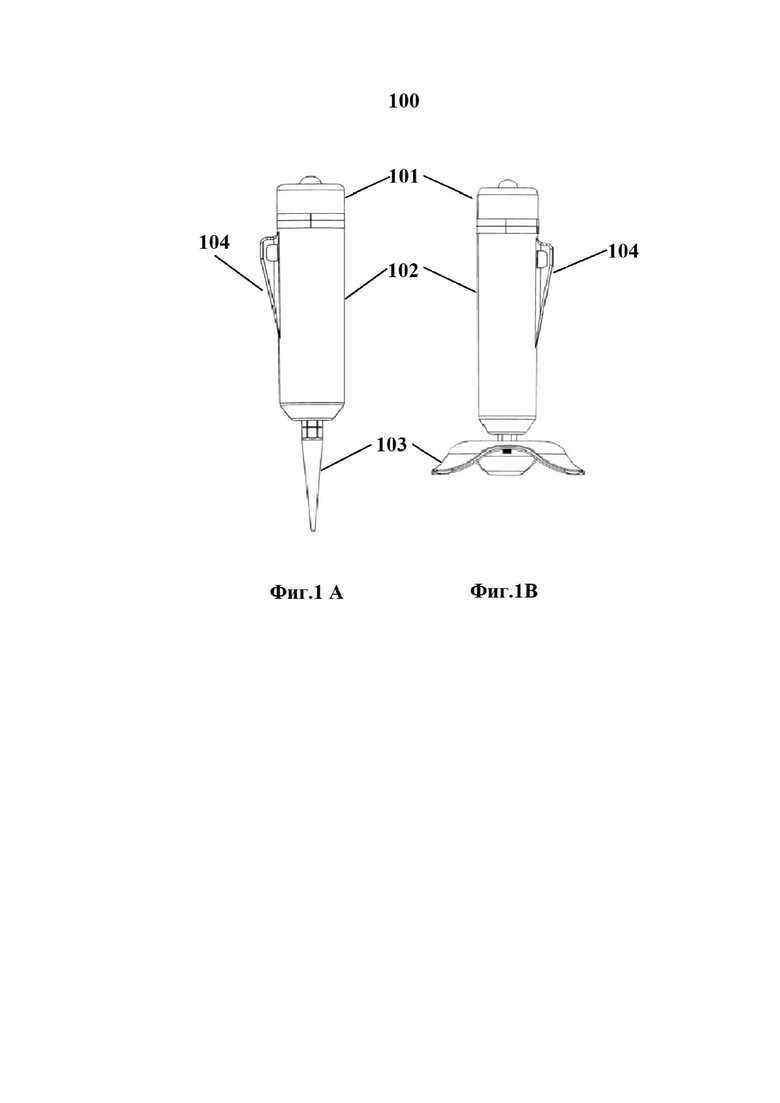
Фиг.1А-B представлены варианты общего вида устройства автономной регистрации сейсмических данных.
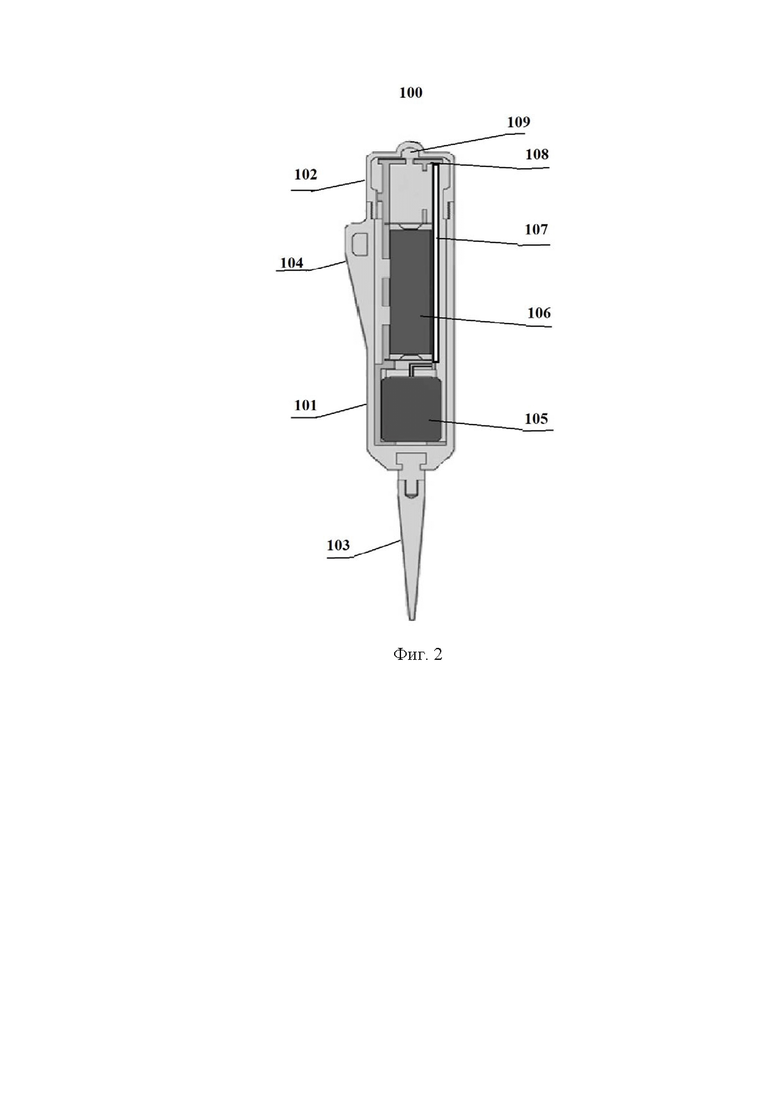
Фиг.2 представлена схематическая конструкция составных частей устройства автономной регистрации сейсмических данных.
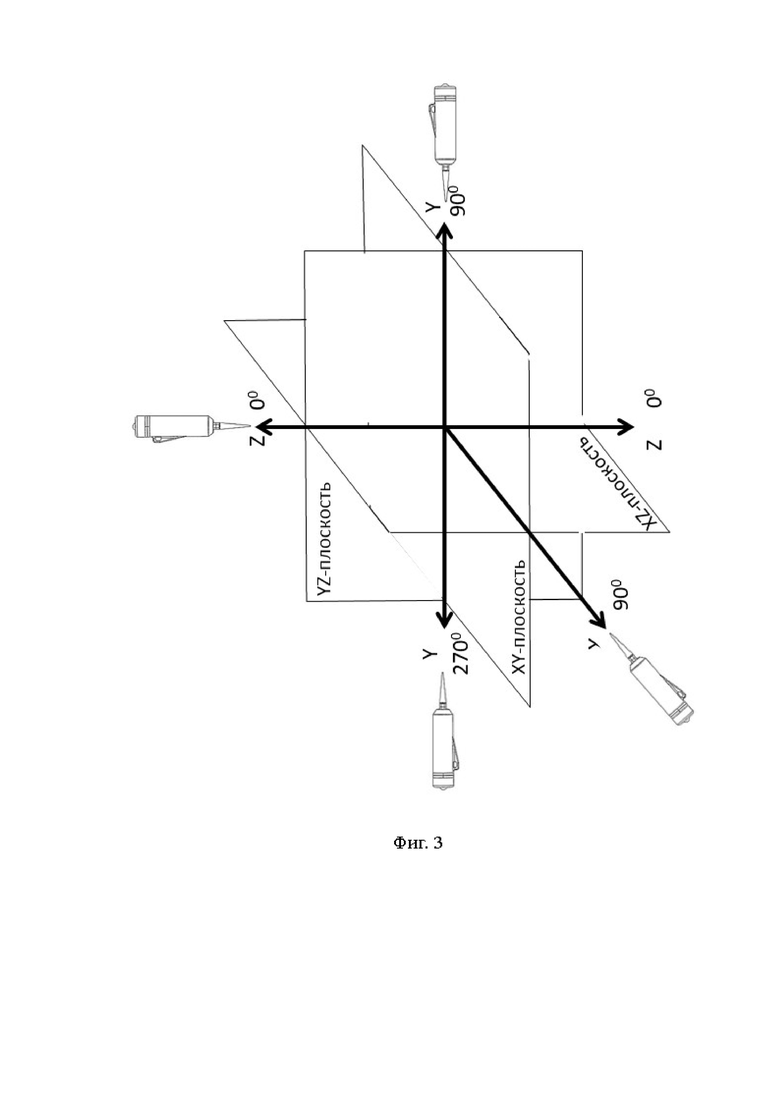
Фиг.3 представлены варианты заранее заданных последовательностей положений в пространстве устройства автономной регистрации сейсмических данных.
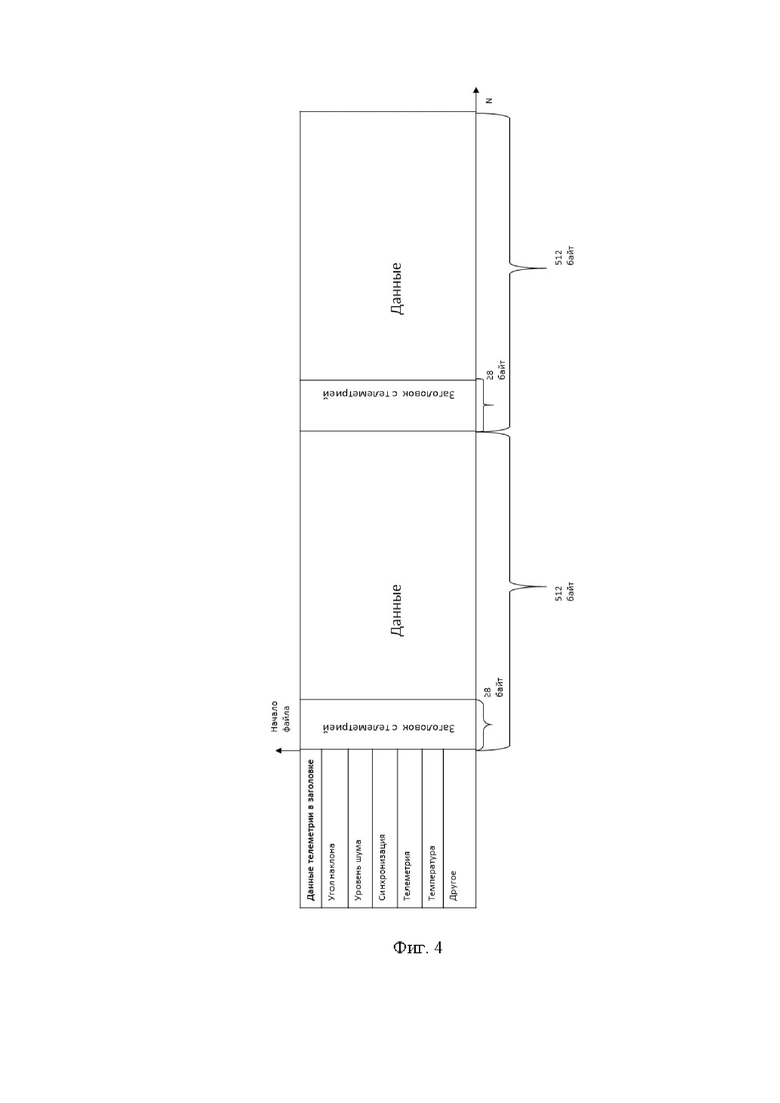
Фиг.4 представлено схематическое изображение структуры файла данных с телеметрией.
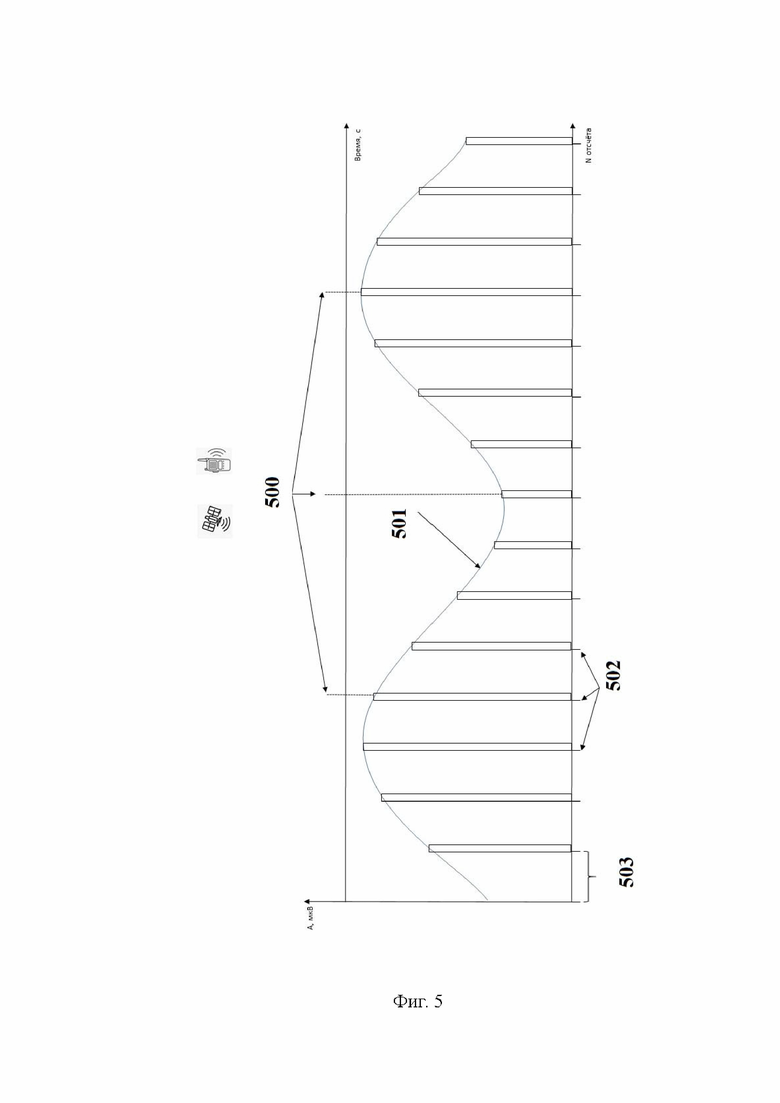
Фиг.5 представлена схема синхронизации записи полевых данных и внешних меток точного времени.
ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
В соответствии с заявленным изобретением предложено устройство автономной регистрации сейсмических данных. Общий вид устройства автономной регистрации сейсмических данных представлен на Фиг.1А и Фиг.1В.
Устройство (100) автономной регистрации сейсмических данных состоит из внешнего герметичного корпуса (102), имеющего форму цилиндра переменного диаметра и выполненного из ударопрочного морозостойкого пластика, крышки (102), установочного приспособления (103) и проушина (104) для подвязки к тросу при установке на грунт. Герметичный корпус (101) и крышка (102) соединяются резьбовым соединением с герметичными уплотнениями. Герметичный корпус (101) также выполнен из ударопрочного пластика и соответствует стандарту IP68.
В качестве установочного приспособления (103) для установки устройства (100) в разные типы грунтов на Фиг.1 представлен штырь, а на фиг.1В представлен трипод.
На Фиг.2 представлена схематическая конструкция составных частей устройства автономной регистрации сейсмических данных.
Внутри внешнего герметичного корпуса (101) расположены соединенные между собой сейсмический датчик (105), источник (106) питания, печатная плата (107). В качестве сейсмического датчика (105) используется широкополосный электродинамический преобразователь, использующий принцип возникновения переменного ЭДС при движении проводника (в данном случае катушки, использующей в качестве подвеса две калиброванные плоские пружины противоположного действия) в постоянном магнитном поле (постоянный магнит) в поперечном силовым линиям поля направлении. Величина переменного ЭДС пропорциональна скорости перемещения катушки, и, соответственно, скорости перемещения грунта. Рабочий диапазон частот используемого датчика 2-250 Гц с низким коэффициентом нелинейных искажений (не более 0,1%) и динамическим диапазоном не менее 110dB в диапазоне допустимых углов наклона. У каждой модели электродинамического датчика существует свой рабочий диапазон углов наклона. При производстве или последующем техническом обслуживании, когда происходит выбор устанавливаемого электродинамического датчика (он является сменным элементом в данной конструкции) можно программно установить предельное значение угла наклона для устанавливаемой модели датчика для последующего контроля. Контроль осуществляется посредством акселерометра задействованного в схеме включения устройства.
В качестве источника (106) питания используется Li-ion аккумулятор типоразмера 18650, либо другой подходящий источник автономного питания.
В центре верхней части крышки (102) отформован полусферический прозрачный элемент (109), выполняющий функцию оптической линзы для установленного внутри крышки (102) многофункционального светодиода, соединенного с печатной платой (107), который предназначен для индикации статуса и наличия неисправностей устройства автономной регистрации сейсмических данных.
Также внутри крышки (102) расположена антенна (108) беспроводной зарядки, выполненная в виде плоской спиралевидной антенны. Зарядка встроенного источника питания (106) осуществляется с помощью полумостового резонансного преобразователя LLC типа с плоской спиралевидной антенной.
Печатная плата (107) используется для соединения всех электронных элементов устройства (100) автономной регистрации сейсмических данных и является многослойной (с целью максимального уменьшения внешних габаритов под установку в компактный корпус). Плата выполнена под установку электронных элементов методом поверхностного монтажа. На печатной плате установлены следующие электронные элементы: аналого-цифровой преобразователь со встроенным предварительным усилителем (АЦП), микроконтроллер (МК), энергонезависимая память (ПЗУ), радиомодуль BL/Wi-Fi, приёмник Глобальных Навигационных Спутниковых Систем (GNSS), преобразователь напряжения, контроллер беспроводной зарядки, тактовый генератор, малошумящий усилитель (МШУ), предварительный усилитель (ПУ), датчик положения-акселерометр, приемник, выполненный с возможностью приема внешних меток точного времени, передаваемых по радиоканалу от внешнего эталона времени, датчик температуры.
Устройство работает следующим образом. Оператор производит установку устройства на земной поверхности, заглубляя его посредством штыря в мягкий грунт на небольшую глубину или устанавливая при помощи трипода на твёрдую поверхность. Включает питание устройства посредством заранее закодированной комбинации движений в пространстве с заданными задержками на каждое положение, и, при этом, укладывающихся суммарно в заданное временное окно. Функциональность по отслеживанию положения устройства в пространстве реализована с помощью акселерометра, выполненного с возможностью регистрации сигналов изменения положения устройства в пространстве и микроконтроллера.
В качестве заранее закодированной комбинации движений используют следующую последовательность положений устройства в пространстве, в исходном положении («Z 00») устройства держат вертикально, затем поворотом руки устройство из вертикального положения поворачивают в плоскости YZ на угол 900 градусов (положение «Y 2700»), затем поворачивают в обратном направлении на 900 (положение «Z 00»), затем поворачивают на 900 (положение «Y 900»)и в обратном направлении (положение «Z 00») затем в плоскости XZ из исходного положения («Z 00») поворачивают на 900 (положение «X 900»)и возвращают обратно в (положение («Z 00») (Фиг. 3). В качестве возможного варианта заранее закодированной комбинации движений можно использовать последовательность 180֯-270֯-0֯-270֯ в плоскости XZ (горизонтальное-вертикальное-горизонтальное-вертикальное положение прибора). Задержка между изменением каждого из положений устройства в пространстве составляет от 1 до 2-х секунд с учетом времени, необходимого для поворота кисти (вариант 1) или локтевого сустава (вариант 2) оператора на заданный угол Фиг.3. При этом заданное временное окно составляет 15 секунд.
При этом достигается последовательность логических 0 и 1 (компаратор со значением модуля |g|). Логический ключ включает питание микроконтроллера только после совпадения выбранной последовательности с полученным сигналом. Выбор определённой последовательности и общего временного окна для её исполнения позволяет исключить случайное включение от тряски и перемещений. Выбор последовательности выбирается оптимальной с точки зрения запоминания и простоты движений. Определённая последовательность движений и временной интервал выбраны для того, чтобы не произошло самопроизвольное включение регистратора в процессе перемещения, хранения, обслуживания и т.п. действий.
Задействование в схеме включения указанных элементов позволяет физически выключать микроконтроллер, а не переводить его в спящий режим с контролем сигнала по входу одного из каналов как это обычно происходит. Все остальные периферийные элементы включаются/выключаются при необходимости только по команде микроконтроллера после его включения. При этом встроенные часы реального времени, задающие в том числе номера отсчета измерений аналогового сигнала, продолжают работать автономно.
После включения устройства микроконтроллер опрашивает по меньшей мере один из АЦП, ПЗУ, радиомодуля BL/Wi-Fi, приёмника (GNSS), преобразователя напряжения, контроллера беспроводной зарядки, тактового генератора, малошумящего усилителя (МШУ), предварительного усилителя (ПУ), датчика положения-акселерометра, приемника, выполненного с возможностью приема внешних меток точного времени, передаваемых по радиоканалу от внешнего эталона времени, датчика температуры на наличие ошибок, и при наличии таких ошибок выдает сигнал оператору, например выдает световой сигнал с помощью многофункционального светодиода, либо посредством подачи звукового сигнала. Также в случае наличия ошибок микроконтроллер управляет записью результатов тестирования в память устройства с привязкой к временным меткам.
Во время работы устройства окружающие условия могут значительно изменяться, например, может появиться шум от работающих механизмов, измениться направление и величина скорости ветра, что привносит дополнительные искажения в показания сейсмического датчика. С целью исключения такого влияния естественных шумов на показания сейсмического датчика микроконтроллер с помощью акселерометра постоянно регистрирует уровень окружающего шума и фиксирует его в трех градациях значений “нормальный”, “предельный”, “не допустимый”, эти уровни задаются индивидуально для каждого проекта в зависимости от региона проведения съемки, погодных условий и т.д. Микроконтроллер присваивает значение 0 при отсутствии отклонений от заранее заданных пределов, а при наличии отклонений от заранее заданных пределов присваивает значение 1 и сохраняет эти значения в памяти устройства с привязкой к временным меткам.
До выполнения полевых сейсморазведочных работ составляется проект на выполнение работ, в котором анализируются исторические данные по климатическим особенностям региона (к примеру, сезоны ветров, ураганов и тп.) и фактические данные по причинам простоя сейсморазведочных партий в данном регионе (простой по погоде, в какое время, уровни шумов в полевых данных). В практике полевых работ на старте проводится тестирование оборудования в полевые условиях, проводится тестовая регистрация сигналов, включая уровни шумов и помех. Исходя из анализа всех вышеперечисленных данных принимаются критерии для приемки полевых данных. Если выбранный уровень естественных шумов превышает выбранное пороговое значения, данные бракуются и не передаются для дальнейшей обработки. Конкретный заранее заданный порог уровня шума записывается в регистратор при установке.
Во время работы устройства положение его в пространстве также может измениться, и выйти за пределы заранее заданного диапазона значений угла наклона устройства, например, из-за влияния внешних факторов, ветер, дождь, снеговая нагрузка/таяние снега, неустойчивая изначальная установка устройства в рыхлом грунте. С целью корректировки таких ошибок положения устройства в пространстве микроконтроллер регистрирует положение устройства в пространстве посредством акселерометра и присваивает значение 0 при отсутствии отклонений от заранее заданных пределов, а при наличии отклонений от заранее заданных пределов присваивает значение 1 и сохраняет эти значения в памяти устройства с привязкой к временным меткам.
Сейсмический датчик (6) установленный внутри корпуса (102), регистрирует сейсмические колебания-отражения от подповерхностных структур, в ответ на возбуждение сейсмического источника, и формирует сигнал, характеризующий сейсмические колебания.
Регистрируемые сейсмические колебания, выраженные в переменном напряжении на выходе датчика, проходят процедуру аналого-цифрового преобразования с помощью малошумящего АЦП типа Дельта-сигма с разрядностью не менее 24 бит с предварительным усилителем. Шаг квантования переменный (0,5 мс; 1 мс и 2 мс) и задается при предварительном вводе параметров записи перед установкой на точку регистрации.
Сейсмические колебания, зарегистрированные сейсмическим датчиком (105), прошедшие процедуру аналого-цифрового преобразования, записываются под управлением микроконтроллера в энергонезависимую память (ПЗУ), выполненную на микросхемах FLASH eMMC.
Синхронизация по времени процесса регистрации происходит в два этапа - первичная синхронизация происходит в момент инициализации устройства автономной регистрации сейсмических данных перед установкой на точку регистрации по опорному сигналу GNSS (Глобальных Навигационных Спутниковых Систем) с помощью приёмника ГНСС высокой точности, либо с помощью внешнего эталона времени по радиоканалу, задающих внешние метки точного времени. Целью первичной синхронизации является установка нулевого времени отсчета в аналого-цифровом преобразователе. Внешний эталон времени в своей работе не опирается на сигналы ГНСС, а использует высокостабильный (термостатированный) встроенный эталон частоты и передает опорный сигнал с помощью радио-передатчиков на любом из открытых диапазонов (136-174МГц, 390-470МГц, 868МГц), доступных пользователю. Внешний эталон времени дублирует функцию внешнего средства позиционирования высокой точности. Основная задача внешнего эталона времени - обеспечение работы системы в случае отсутствия или нарушений в приёме сигналов систем GNSS.
Второй этап синхронизации осуществляется периодически с целью корректирующей синхронизации внутреннего эталона частоты по соответствующим специализированным сигналам ГНСС c использованием встроенного приёмника ГНСС и предназначен для корректировки длительности отсчета измерений аналогового сигнала для компенсации ухода частоты тактового генератора аналого-цифрового преобразователя.
В одном варианте осуществления второй этап двухэтапной синхронизации отсчета измерений аналогового сигнала, полученного сейсмическим датчиком, осуществляют на основе зарегистрированного значения датчика температуры. В частности, частота тактового генератора изменяется на десятки ppm (parts per million, 10–6) при изменении температуры в широких интервалах. Особое значение такое изменение частоты тактового генератора приобретает в условиях низких температур, например, при эксплуатации устройства в условиях Крайнего Севера. С целью компенсации ухода частоты тактового генератора аналого-цифрового преобразователя в файле данных с телеметрией содержатся значения температуры, зарегистрированные датчиком температуры с внешними метками точного времени и номерами отсчета данных. Эти значения используются на этапе обработки данных для корректировки полученных сейсмических данных. Также эти значения можно использовать для синхронизации отсчета измерений аналогового сигнала, посредством подстройки частоты тактового генератора аналого-цифрового преобразователя с учетом изменившейся температуры.
Повышение уровня достоверности регистрируемой информации достигается путём записи в отдельный файл данных с телеметрией (встроенная память) с привязкой по времени с целью последующего использования при организации контроля качества полевой информации и принятии решения об отбраковке данных с устройств, имеющих “ошибки” в определённых временных окнах в процессе обработки следующей информации о наличии “ошибок”, а именно: состояние встроенного источника питания; предельного размера свободного пространства встроенной памяти; наличие ошибок синхронизации; наличие ошибок установки устройства (за пределами рабочего диапазона углов установки электродинамического датчика), уровня шума (трех градаций значений “нормальный”, “предельный”, “не допустимый”), задаваемого индивидуально для каждого проекта и измеряемого встроенным акселерометром.
Файл данных с телеметрией (Фиг.4) имеет следующую структуру: файлы данных записываются секторами, вначале каждого сектора записывается заголовок с данными телеметрии на момент записи. При отсутствии отклонений записываются 0 в значении каждого из контролируемых параметров, а при наличии отклонений записывается 1 в ячейке, соответствующей достигнутому заданному пороговому значению. Для каждого из параметров может быть задано как минимум 3 пороговых значения в зависимости от выполняемой задачи.
На фиг.5 представлена схема синхронизации записи полевых данных и внешних меток точного времени. Аналоговые сейсмические данные (501), поступающие от сейсмического датчика проходят процедуру оцифровки (502) непрерывного сигнала с помощью аналого-цифрового преобразования с соответствующим шагом (503) дискретизации, оставляющим 0,5 мс, 1 мс, 2 мс. Также осуществляют регистрацию и запись (500) внешних меток точного времени, поступающих от GNSS или эталонного радиоканала.
В отношении меток точного времени в заголовке в выделенном разделе отмечается номер отсчета данных, на который пришлась данная метка. В последствии при обработке по этим меткам можно вводить коррекцию для восстановления синхронизации записи. Контролируется количество отсчетов измерений, полученных микроконтроллером от АЦП в рамках соседних внешних меток точного времени (Фиг.5). Отсчеты измерений не записываются т.к. они четко соответствуют заданному шагу дискретизации отсчетов данных.
Отсутствие получения внешних меток точного времени от средств позиционирования/внешних эталонов в назначенное время для последующей коррекции (подстройки) может приводить к критической рассинхронизации, поэтому факт отсутствия внешних меток точного времени фиксируется в файле данных с телеметрией с привязкой по времени относительно номеров отсчетов данных для последующего принятия решения об исключении сейсмических данных зарегистрированных в период отсутствия временной коррекции из последующей обработки с целью исключения их негативного влияния на суммарный результат.
Процесс двухстороннего обмена данными устройства с внешними устройствами осуществляется при помощи встроенного универсального радиомодуля, выполненного на одном кристалле, работающего в протоколах Bluetooth LE (low energy), не ниже стандарта 5.0 и WI-FI не ниже 5 поколения (поддерживающий стандарты IEEE 802.11a/b/g/n/ac/ax). Приемопередатчик протокола Bluetooth LE используется для выполнения следующих задач: первичного ввода параметров регистрации перед установкой на точку регистрации в составе: шаг дискретизации записи; уровень усиления; порядковый номер в текущей расстановке устройства автономной регистрации сейсмических данных (присваивается в процессе расстановки устройств в соответствии с разработанным планом сейсморазведочных работ); опрос статуса устройства в составе: уникальный серийный номер; порядковый номер в текущей расстановке устройств; состояние встроенного источника питания; размер свободного пространства встроенной памяти; текущие координаты; наличие ошибок синхронизации, вызванных недоступностью сигналов, получаемых с помощью Глобальных Навигационных Спутниковых Систем (GNSS); наличие ошибок установки устройства (за пределами рабочего диапазона углов установки сейсмического датчика, ошибки, ошибки, выявленные в результате инициализации или проверки основных электронных элементов и сейсмического датчика, активации встроенного Wi-Fi модуля. Приемопередатчик протокола Wi-Fi используется для выполнения следующих задач: для выгрузки файла данных с телеметрией; для обновления встроенного ПО.
Файл данных с телеметрией может направляться для обработки во внешнее устройство обработки, находящееся, например, в кабине оператора, который управляет работой всего комплекса. К системе управления работой источников сейсмических сигналов (внешнее устройство обработки) подключается блок синхронизации, построенный по примеру устройства автономной регистрации сейсмических данных, который вместо записи сейсмических сигналов записывает синхроимпульсы начала запуска сейсмических источников (это стандартный выходной сигнал всех систем управления сейсмическими источниками). Поскольку этот блок синхронизации построен по примеру устройств, которые устанавливаются в грунт для регистрации сейсмических сигналов он так же синхронизируется по GNSS. В последствии, когда происходит обработка сейсмических данных, полученных из устройства автономной регистрации сейсмических данных используя файл данных с телеметрией с временными метками стартов сейсмических источников происходит вычленение (обрезка по времени) полезного сигнала в интервалах от начала запуска сейсмических источников до окончания прихода полезных сейсмических волн, отраженных от целевых подповерхностных горизонтов (время устанавливается предварительно на основе расчетных данных) и одинаково для всех записей.
ЭКСПЕРИМЕНТАЛЬНЫЕ ДАННЫЕ
Были проведены лабораторные испытания устройства автономной регистрации сейсмических данных. В результате посредством исключения из сейсмических данных сейсмических трасс, имеющих повышенную зашумленность естественными шумами, была увеличена точность полученных данных на 95%. Были снижены ошибки, вызванные некорректной установкой сейсмического регистратора в местоположении проведения измерений на 99%, оператор при установке регистратора сразу же получал сигнал о том, что устройство неправильно установлено и исправлял ошибку установки. Более того, наличие в файле данных с телеметрией информации о статусе сейсмического датчика позволило выявить некорректную установку устройства уже после установки устройства в лаборатории на этапе обработки данных. Также были обнаружены ошибки, обусловленные недоступностью сигналов, получаемых с помощью Глобальных Навигационных Спутниковых Систем (GNSS), которые сохранены в файле данных с телеметрией, исключение которых позволило увеличить точность на 98%. При проведении лабораторных испытаний устройства в условиях низких температур в термокамере, ошибки, обусловленные изменениями температуры при проведении измерений, были откорректированы либо при обработке в удаленном местоположении, либо дистанционно был направлен сигнал на подстройку частоты тактового генератора аналого-цифрового преобразователя с учетом изменившейся температуры, вследствие чего точность полученных данных была увеличена на 90%.
Специалистам в данной области техники будет понятно, что изобретение может быть осуществлено в различных конфигурациях компьютерных систем, включая портативные устройства, мультипроцессорные системы, основанную на микропроцессорах или программируемую бытовую электронную аппаратуру, миникомпьютеры, большие компьютеры и тому подобное. Любое число сетей компьютерных систем и компьютеров допустимо для использования с настоящим изобретением. Изобретение может быть осуществлено в среде распределенных вычислений, где задания выполняются устройствами дистанционной обработки, связанными по сети связи. В среде распределенных вычислений программные модули могут быть расположены как в локальных, так и в дистанционных запоминающих носителях. Следовательно, настоящее изобретение может быть осуществлено в соединении с различными техническими средствами, программным обеспечением или их комбинации в компьютерной системе или другой системе обработки.
Системы осуществления настоящего изобретения может быть реализована на компьютере. Система включает в себя вычислительный элемент, блок обработки, иногда называемый вычислительной системой, которая содержит устройство памяти, прикладные программы, интерфейс клиента, видеоинтерфейс и элемент обработки. Вычислительный элемент приведен только для примера подходящей вычислительной среды и не ограничивает объем применения или функциональность изобретения.
Устройство памяти хранит прикладные программы, которые также могут быть описаны как программные модули, содержащие машиновыполняемые инструкции, выполняемые вычислительным элементом для осуществления настоящего изобретения.
Настоящее изобретение может быть осуществлено в машиновыполняемой программе инструкций, такой как программные модули, обычно называемые программными приложениями или прикладными программами, выполняемыми компьютером. Программное обеспечение может включать в себя, например, стандартные функции, программы, объекты, компоненты и структуры данных, которые выполняют конкретные задания или осуществляют конкретные абстрактные типы данных. Программное обеспечение формирует интерфейс, что позволяет компьютеру реагировать в соответствии с источником ввода. Программное обеспечение может также кооперировать с другими сегментами кода для инициации различных заданий в ответ на данные, принятые совместно с источником принятых данных. Программное обеспечение может храниться и/или переноситься на любом устройстве памяти, таком как CD-ROM, магнитный диск и запоминающее устройство на полупроводниках (например, различные виды RAM или ROM). Дополнительно, программное обеспечение и его результаты могут передаваться по любому из множества носителей, таких как оптическое волокно, металлический провод и/или по любому из множества сетей, таких как интернет.
Вычислительный элемент обладает универсальным устройством памяти, вычислительный элемент обычно включает в себя различные машиночитаемые носители. В качестве не ограничивающего примера машиночитаемый носитель может содержать запоминающий носитель. Устройство памяти вычислительной системы может включать в себя запоминающий носитель в форме энергозависимого и/или энергонезависимого запоминающего устройства, такого как постоянное запоминающее устройство (ROM) и оперативное запоминающее устройство (RAM). Базовая система (BIOS) ввода-вывода, содержащая стандартные программы, которые помогают передавать информацию между элементами внутри вычислительного элемента, например, во время начала работы, обычно хранится в ROM. RAM обычно содержит данные и/или программные модули, которые оперативно доступны и/или выполняются в настоящее время на элементе обработки. В качестве не ограничивающего примера вычислительный элемент включает в себя операционную систему, прикладные программы, другие программные модули и программные данные.
Компоненты, изображенные в устройстве памяти, могут быть также включены в другие съемные/несъемные, энергозависимые/энергонезависимые запоминающие носители, либо они могут быть осуществлены в вычислительном элементе посредством интерфейса (“API”) прикладной программы, который может находиться на отдельном вычислительном элементе, соединенном через компьютерную систему или сеть. Например, накопитель на жестких дисках может читать или записывать на несъемный, энергонезависимый магнитный носитель; накопитель на магнитных дисках может читать или записывать на съемный, энергонезависимый магнитный диск; и накопитель на оптических дисках может читать или записывать на съемный, энергонезависимый оптический диск, такой как CD ROM или другой оптический носитель. Другие съемные/несъемные, энергозависимые/энергонезависимые запоминающие носители, которые могут быть использованы в типичной операционной среде, могут включать в себя, но не ограничиваясь, кассеты с магнитной лентой, карты флэш-памяти, универсальные цифровые диски, цифровую магнитную ленту, полупроводниковый RAM, полупроводниковый RОM, и тому подобное. Накопители и их связанные запоминающие носители, описанные выше, обеспечивают хранение машиновыполняемых инструкций, структур данных, программных модулей и других данных для вычислительного элемента.
Клиент может вводить команды и информацию в вычислительный элемент через интерфейс клиента, который может быть устройством ввода, таким как клавиатура или указательное устройство, обычно называемое мышью, шаровой манипулятор управления или сенсорная панель. Устройства ввода могут включать в себя микрофон, джойстик, спутниковую антенну, сканер и тому подобное. Эти и другие устройства ввода часто соединены с элементом обработки через системную шину, но также могут быть соединены с помощью других структур интерфейса и шины, таких как параллельный порт или универсальная последовательная шина (USB).
Монитор или другой тип устройства вывода могут быть соединены с системной шиной посредством интерфейса, такого как видеоинтерфейс. Графический интерфейс (“GUI”) пользователя может также быть использован с видеоинтерфейсом для приема инструкций от интерфейса клиента и передачи инструкций на элемент обработки. Дополнительно к монитору, компьютеры могут также включать в себя другие периферические устройства вывода, такие как динамики и принтер, которые могут быть соединены через периферический интерфейс вывода.
Хотя многие другие компоненты вычислительного элемента не изображены, специалистам в данной области техники будет понятно, что такие компоненты и их взаимосвязь хорошо известны.
Очевидно, что описанные выше варианты осуществления не должны рассматриваться в качестве ограничения объема патентных притязаний изобретения. Для любого специалиста в данной области техники понятно, что есть возможность внести множество изменений в описанные выше методику и, без отхода от принципов изобретения, заявленного в формуле изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАЛОГАБАРИТНЫЙ ДОННЫЙ СЕЙСМИЧЕСКИЙ МОДУЛЬ | 2013 |
|
RU2549606C2 |
| ПОДВОДНАЯ ГЕОФИЗИЧЕСКАЯ СТАНЦИЯ | 2010 |
|
RU2435180C1 |
| АВТОНОМНАЯ ДОННАЯ СТАНЦИЯ ДЛЯ СЕЙСМИЧЕСКИХ НАБЛЮДЕНИЙ | 2010 |
|
RU2438149C2 |
| МАЛОГАБАРИТНЫЙ ДОННЫЙ СЕЙСМИЧЕСКИЙ МОДУЛЬ | 2014 |
|
RU2554283C1 |
| ПОДВОДНАЯ ОБСЕРВАТОРИЯ | 2011 |
|
RU2468395C1 |
| Самовсплывающая портативная донная сейсмическая станция без оставления груза на дне моря | 2022 |
|
RU2796944C1 |
| СПОСОБ СЕЙСМИЧЕСКОЙ РАЗВЕДКИ ПРИ ПОИСКЕ УГЛЕВОДОРОДОВ И СЕЙСМИЧЕСКИЙ КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2431868C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ КОРРЕКЦИИ ФУНКЦИИ СИНХРОНИЗАЦИИ В УЗЛОВОМ БЛОКЕ СБОРА СЕЙСМИЧЕСКИХ ДАННЫХ | 2008 |
|
RU2518857C2 |
| СПОСОБ СЕЙСМИЧЕСКОЙ РАЗВЕДКИ ПРИ ПОИСКЕ УГЛЕВОДОРОДОВ И СПОСОБ ОПРЕДЕЛЕНИЯ ЗАЛЕГАНИЯ ПРОДУКТИВНЫХ НА УГЛЕВОДОРОДЫ ПЛАСТОВ И СЕЙСМИЧЕСКАЯ СТАНЦИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2433425C2 |
| АВТОНОМНЫЙ ЦИФРОВОЙ СЕЙСМОМЕТР | 2010 |
|
RU2435175C1 |
Изобретение относится к области геофизики. Предложено устройство автономной регистрации сейсмических данных, содержащее корпус, средство получения внешних меток точного времени, сейсмический датчик, аналого-цифровой преобразователь, акселерометр, датчик температуры, микроконтроллер, энергонезависимую память, средства связи. Причем микроконтроллер управляет записью в энергонезависимую память файла данных с телеметрией, содержащего последовательность цифровых значений сейсмического сигнала, последовательность данных телеметрии. Последовательность данных телеметрии содержит номер отсчета измерений аналогового сигнала, полученного сейсмическим датчиком, в который была получена внешняя метка точного времени, метки отклонения зарегистрированных значений сигналов акселерометра от заранее заданных пороговых значений сигналов акселерометра с указанием внешних меток точного времени, в которые были зарегистрированы отклонения, значения датчика температуры, метки статуса состояния электронных компонентов устройства. Техническим результатом является повышение уровня достоверности полученных измерений сейсмического сигнала. 3 н. и 30 з.п. ф-лы, 5 ил.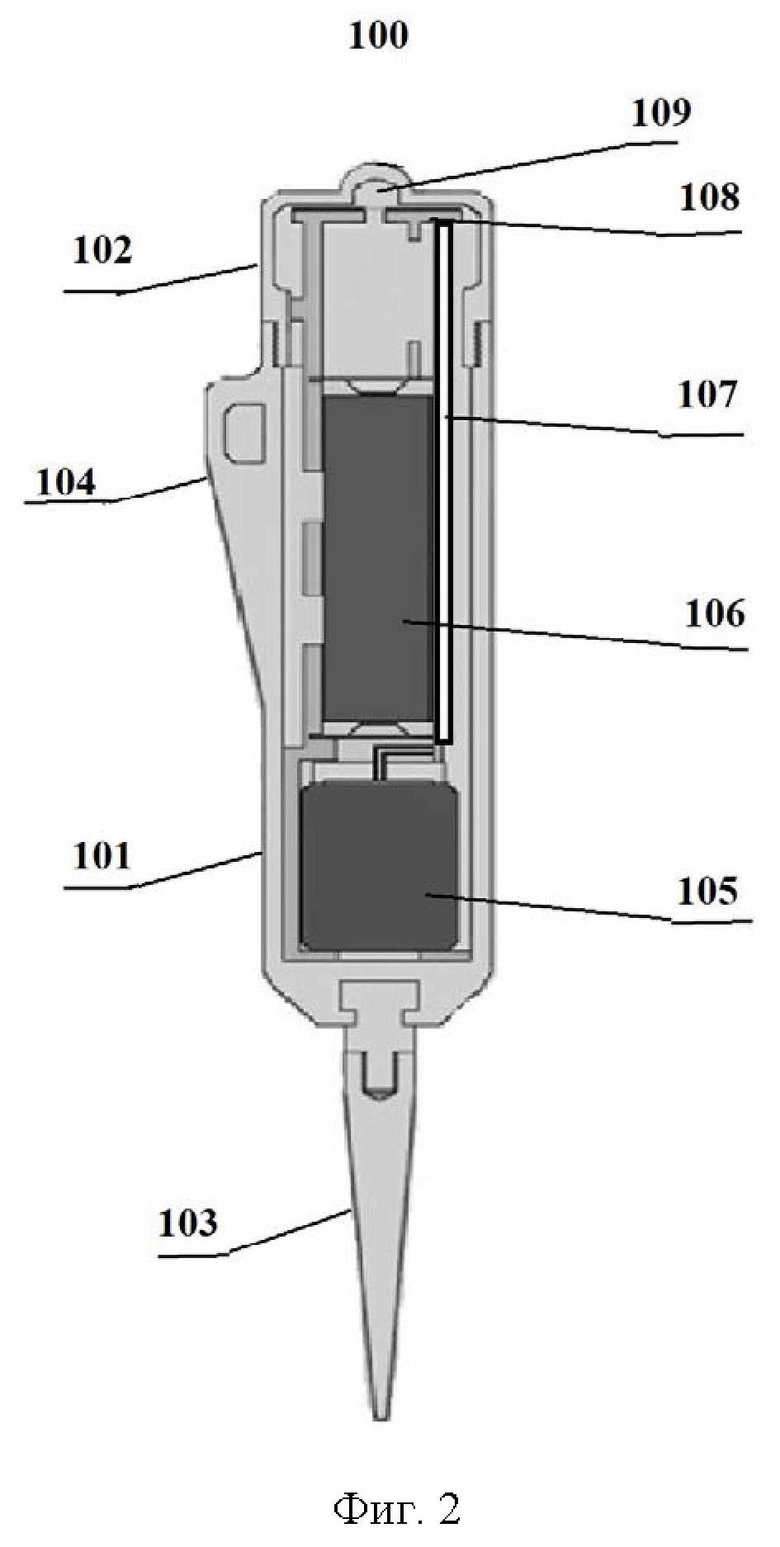
1. Устройство автономной регистрации сейсмических данных, содержащее:
корпус, в котором размещены, по меньшей мере, электронные компоненты, содержащие:
по меньшей мере одно средство получения внешних меток точного времени;
сейсмический датчик, выполненный с возможностью регистрации сейсмических колебаний-отражений от подповерхностных структур, в ответ на возбуждение сейсмического источника, и формирования аналогового сигнала, характеризующего сейсмические колебания,
аналого-цифровой преобразователь, выполненный с возможностью преобразования аналогового сигнала, полученного сейсмическим датчиком в цифровые значения сейсмического сигнала;
акселерометр, выполненный с возможностью регистрации сигналов изменения положения устройства в пространстве;
датчик температуры, выполненный с возможностью измерения температуры;
микроконтроллер, выполненный с возможностью получения и обработки зарегистрированных сигналов от по меньшей мере одного из средства получения внешних меток точного времени, аналого-цифрового преобразователя, акселерометра, датчика температуры и задания номеров отсчета измерений аналогового сигнала, полученного сейсмическим датчиком;
энергонезависимую память, выполненную с возможностью сохранения, по меньшей мере, значений сигналов средства получения внешних меток точного времени, аналого-цифрового преобразователя, акселерометра, датчика температуры;
причем микроконтроллер дополнительно выполнен с возможностью управления записью в энергонезависимую память файла данных с телеметрией, содержащего:
последовательность цифровых значений сейсмического сигнала;
последовательность данных телеметрии, содержащих:
номер отсчета измерений аналогового сигнала, полученного сейсмическим датчиком, в который была получена внешняя метка точного времени;
метки отклонения зарегистрированных значений сигналов акселерометра от заранее заданных пороговых значений сигналов акселерометра с указанием внешних меток точного времени, в которые были зарегистрированы отклонения,
зарегистрированные значения датчика температуры;
метки статуса состояния электронных компонентов устройства, подключённых к микроконтроллеру;
средства связи, выполненные с возможностью передачи, по меньшей мере, файла данных с телеметрией и метки статуса состояния электронных компонентов устройства и приёма, по меньшей мере, команд управления и сигналов синхронизации.
2. Устройство по п.1, в котором микроконтроллер дополнительно выполнен с возможностью подачи сигнала на включение/выключение по меньшей мере одного из электронных компонентов по сигналу, полученному от акселерометра.
3. Устройство по п.2, в котором микроконтроллер дополнительно выполнен с возможностью формирования сигнала на включение/выключение изменением положения устройства в пространстве посредством придания устройству заранее заданной последовательности положений в пространстве с заданными задержками на каждое положение, и, при этом, укладывающихся суммарно в заданное временное окно.
4. Устройство по п.3, в котором заранее заданная последовательность положений в пространстве содержит исходное вертикальное положение устройства в пространстве, затем поворот устройства из вертикального положения на угол 90 градусов, затем поворот на 180 градусов, затем поворот в обратном направлении на 90 градусов.
5. Устройство по п.3, в котором заранее заданная задержка на каждое положение составляет от 1 до 2 секунд.
6. Устройство по п.3, в котором заданное временное окно составляет 15 секунд.
7. Устройство по п.1, в котором зарегистрированные значения сигналов акселерометра и заранее заданные значения сигналов акселерометра представляют собой уровень естественных шумов.
8. Устройство по п.1, в котором зарегистрированные значения сигналов акселерометра и заранее заданные значения сигналов акселерометра представляют собой угол наклона устройства.
9. Устройство по п.1, в котором метки отклонения зарегистрированных значений сигналов акселерометра от заранее заданных пороговых значений сигналов акселерометра представляют собой по меньшей мере три пороговых значения.
10. Устройство по п.1, в котором метки отклонения зарегистрированных значений сигналов акселерометра от заранее заданных пороговых значений сигналов акселерометра представляют собой значение 0 при отсутствии отклонений, а при наличии отклонений представляют собой значение 1.
11. Устройство по п.8, в котором микроконтроллер дополнительно выполнен с возможностью подачи сигнала в случае отклонения текущего угла наклона устройства за пределы заранее заданного диапазона значений угла наклона устройства.
12. Устройство по п.11, в котором сигнал представляет собой световой индикатор или звуковой индикатор.
13. Устройство по п.1, в котором по меньшей мере одно средство получения внешних меток точного времени представляет собой приемник Глобальных Навигационных Спутниковых Систем (GNSS).
14. Устройство по п.1, в котором по меньшей мере одно средство получения внешних меток точного времени представляет собой приемник, выполненный с возможностью приема внешних меток точного времени, передаваемых по радиоканалу от внешнего эталона времени.
15. Устройство по п.1, в котором микроконтроллер дополнительно выполнен с возможностью синхронизации отсчета измерений аналогового сигнала, полученного сейсмическим датчиком, с помощью двухэтапной синхронизации времени.
16. Устройство по п.15, в котором первый этап двухэтапной синхронизации отсчета измерений аналогового сигнала, полученного сейсмическим датчиком, предназначен для установки нулевого времени отсчета в аналого-цифровом преобразователе, а второй этап двухэтапной синхронизации отсчета измерений аналогового сигнала, полученного сейсмическим датчиком, предназначен для корректировки длительности отсчета измерений аналогового сигнала для компенсации ухода частоты тактового генератора аналого-цифрового преобразователя.
17. Устройство по п.16, в котором первый этап двухэтапной синхронизации отсчета измерений аналогового сигнала, полученного сейсмическим датчиком, осуществляют с помощью отдельного приемника Глобальных Навигационных Спутниковых Систем (GNSS) при установке устройства в поле.
18. Устройство по п.16, в котором первый этап двухэтапной синхронизации отсчета измерений аналогового сигнала, полученного сейсмическим датчиком, осуществляют с помощью приемника, выполненного с возможностью приема внешних меток точного времени, передаваемых по радиоканалу от внешнего эталона времени в поле.
19. Устройство по п.16, в котором второй этап двухэтапной синхронизации отсчета измерений аналогового сигнала, полученного сейсмическим датчиком, осуществляют с помощью средства получения внешних меток точного времени по любому из пп.13 или 14 во время эксплуатации устройства.
20. Устройство по п.16, в котором второй этап двухэтапной синхронизации отсчета измерений аналогового сигнала, полученного сейсмическим датчиком, осуществляют на основе зарегистрированного значения датчика температуры.
21. Способ автономной регистрации сейсмических данных с помощью устройства по любому из пп.1-20, в котором:
получают метки точного времени;
регистрируют сейсмические колебания-отражения от подповерхностных структур, в ответ на возбуждение сейсмического источника, и формируют аналоговый сигнал, характеризующий сейсмические колебания,
преобразуют аналоговый сигнал, полученный сейсмическим датчиком, в цифровые значения сейсмического сигнала;
регистрируют сигнал изменения положения устройства в пространстве;
измеряют температуру;
получают, обрабатывают и сохраняют зарегистрированные метки точного времени, цифровые значения сейсмического сигнала, сигнал изменения положения устройства в пространстве, значение температуры; и задают номера отсчета измерений аналогового сигнала, полученного сейсмическим датчиком;
записывают в энергонезависимую память файл данных с телеметрией, содержащий:
последовательность цифровых значений сейсмического сигнала;
последовательность данных телеметрии, содержащих:
номер отсчета измерений аналогового сигнала, полученного сейсмическим датчиком, в который была получена внешняя метка точного времени;
метки отклонения зарегистрированных значений сигналов акселерометра от заранее заданных пороговых значений сигналов акселерометра с указанием внешних меток точного времени, в которые были зарегистрированы отклонения,
зарегистрированные значения температуры;
метки статуса состояния электронных компонентов устройства, подключённых к микроконтроллеру;
передают, по меньшей мере, файл данных с телеметрией и метки статуса состояния электронных компонентов устройства и принимают, по меньшей мере, команды управления и сигналы синхронизации.
22. Способ по п.21, в котором включают/выключают устройство изменением положения устройства в пространстве посредством придания устройству заранее заданной последовательности положений в пространстве с заданными задержками на каждое положение, и, при этом, укладывающихся суммарно в заданное временное окно.
23. Способ по п.21, в котором зарегистрированные значения акселерометра и заранее заданные значения акселерометра представляют собой уровень естественных шумов.
24. Способ по п.21, в котором зарегистрированные значения акселерометра и заранее заданные значения акселерометра представляют собой угол наклона устройства.
25. Способ по п.22, в котором подают сигнал в случае отклонения текущего угла наклона устройства за пределы заранее заданного диапазона значений угла наклона устройства.
26. Способ по п.21, в котором получают внешние метки точного времени с помощью приемника Глобальных Навигационных Спутниковых Систем (GNSS).
27. Способ по п.21, в котором получают внешние метки точного времени с помощью приемника, выполненного с возможностью приема внешних меток точного времени, передаваемых по радиоканалу от внешнего эталона времени.
28. Способ по п.21, в котором принимают сигналы синхронизации для синхронизации внутренних меток точного времени с помощью двухэтапной синхронизации времени.
29. Способ по п.21, в котором на первом этапе двухэтапной синхронизации внутренних меток точного времени устанавливают нулевое время отсчета в тактовом генераторе, а на втором этапе двухэтапной синхронизации временных меток корректируют длительность единичного временного интервала для компенсации ухода частоты тактового генератора.
30. Способ по п.29, в котором первый этап двухэтапной синхронизации временных меток осуществляют с помощью отдельного приемника Глобальных Навигационных Спутниковых Систем (GNSS) при установке устройства в поле.
31. Способ по п.29, в котором первый этап двухэтапной синхронизации временных меток осуществляют с помощью приемника, выполненного с возможностью приема внешних меток точного времени, передаваемых по радиоканалу от внешнего эталона времени в поле.
32. Способ по п.29, в котором второй этап двухэтапной синхронизации временных меток осуществляют с помощью средства получения внешних меток точного времени по любому из пп.26 или 27 во время эксплуатации устройства.
33. Машиночитаемый носитель, содержащий машиновыполняемые инструкции, выполняемые микроконтроллером устройства по п.1, при выполнении которых выполняются действия способа по любому из пп.21-32.
| ПРИБОР ДЛЯ ОПРЕДЕЛЕНИЯ РАССЫПАЕМОСТИ СТЕКЛОЖГУТА | 1966 |
|
SU215581A1 |
| АВТОНОМНЫЙ ЦИФРОВОЙ СЕЙСМОМЕТР | 2010 |
|
RU2434249C1 |
| Регистратор малошумящий низкочастотного аналогового сигнала | 2018 |
|
RU2685067C1 |
| АВТОНОМНЫЙ РЕГИСТРАТОР СЕЙСМИЧЕСКИХ СИГНАЛОВ | 2007 |
|
RU2331087C1 |
| СЕЙСМИЧЕСКИЙ ДАТЧИК И УСТРОЙСТВО СБОРА ДАННЫХ | 2013 |
|
RU2578734C2 |
| 0 |
|
SU199415A1 | |
| Колесо для лыжероллеров | 1979 |
|
SU967494A1 |
| CN 204065423 U, 31.12.2014. | |||

