Изобретение относится к радиолокации, в частности к средствам навигации ЛА по полю радиолокационного контраста земной поверхности.
Способ навигации ЛА по полю радиолокационного контраста земной поверхности заключается в сопоставлении рабочей информации, получаемой бортовым радиолокационным датчиком (БРД), с эталонной информацией, подготовленной заранее, путем расчета некоторого функционала типа взаимнокорреляционной функции. Затем определяют максимум функционала и с помощью его параметров производят оценку ошибок инерциальной системы управления ЛА.
Известен способ навигации по полю радиолокационного контраста (US №4914734, 21.07.1989, G01S 13/86), где для корреляционного сопоставления используются подготовленная заранее эталонная карта в виде матрицы значений УЭПР и рабочая карта в виде матрицы интенсивностей отраженного сигнала, получаемая БРД. Для формирования рабочей карты датчик осуществляет построчное сканирование узким лучом в секторе плюс-минус 30 градусов в вертикальной плоскости, перпендикулярной направлению движения ЛА. Рабочая и эталонная карта сопоставляются с помощью алгоритма наименьшей дисперсии. Результатом сопоставления является корреляционная матрица, в которой производится поиск максимального значения. С помощью оценки положения максимума в матрице формируется оценка ошибки положения ЛА.
Данный способ имеет существенное отличие от предлагаемого, заключающееся в том, что в предлагаемом способе БРД получает рабочую информацию с помощью РЛС с синтезированием апертуры. При этом сканирование антенной производится в горизонтальной плоскости. Сектор сканирования составляет от 50 до 20 градусов справа или слева относительно проекции вектора скорости ЛА на горизонтальную плоскость. В вертикальной плоскости лучом диаграммы направленности засвечивается участок земной поверхности, находящийся в передней полусфере ЛА под углом места в диапазоне от минус 3 до минус 6 градусов.
Наиболее близким по технической сущности аналогом предлагаемого способа является способ, описанный в патенте US №5430445, 12.31.1992, G01S 13/90.
Эталонное РЛИ формируется на основе предварительно полученного фотоснимка заданного участка земной поверхности. Снимок должен быть получен при углах визирования в пределах ±10 градусов относительно вертикали. Процедура подготовки эталона состоит из четырех этапов: перевод фотоснимка в цифровую форму с помощью сканера, выбор участка сцены для формирования эталона, оконтуривание и классификация информативных деталей, генерация эталонного РЛИ. При генерации эталона выполняется моделирование предполагаемого радиолокационного отклика с учетом отражающих свойств выделенных деталей, а также их взаимного затенения. Затем РЛИ обрабатывается с целью выделения информативных признаков. Такими признаками служат локальные градиенты яркости. После данной процедуры эталонное РЛИ представляет собой совокупность объектов, описывающих границы положительных и отрицательных перепадов яркости. Обработанное эталонное РЛИ передается в память бортового вычислителя ЛА и используется при корреляционном сопоставлении с рабочим РЛИ. Еще один метод подготовки эталона заключается в использовании предварительно полученного радиолокационного изображения заданного участка земной поверхности.
БРД, установленный на ЛА, получает рабочее РЛИ с помощью режима синтезирования апертуры. При этом производится сканирование участка земной поверхности, находящегося в переднебоковом азимутальном секторе под малым углом места. Пятно диаграммы направленности (ДН) дискретно перемещается по участку, получая множество парциальных РЛИ, которые объединяются в полное рабочее РЛИ. Для улучшения качества РЛИ может применяться некогерентное накопление нескольких изображений, полученных на разных несущих частотах.
Процедура корреляционного сопоставления эталонного и рабочего РЛИ заключается в расчете функционала, который основан на результатах поиска совпадений информативных объектов эталонного и рабочего РЛИ. В результате расчета создается корреляционная матрица двух изображений. После поиска максимального значения производится оценка координат приоритетной точки (ПТ) с учетом ошибок инерциальной навигационной системы.
Однако такой способ обладает следующими недостатками.
1. Невозможность оперативного изменения траекторий движения ЛА к заданному участку местности вследствие необходимости предварительной подготовки эталонного изображения.
2. Необходимость наличия БРД с высоким пространственным разрешением для селекции контуров.
3. Отсутствие учета теневых участков РЛИ большой протяженности, появление которых обусловлено наблюдением местности под малым углом в вертикальной плоскости.
Технический результат предлагаемого решения заключается в повышении достоверности правильной идентификации положения летательного аппарата, достигаемый путем совместного использования площадных и точечных ориентиров при сопоставлении эталонного и рабочего изображений, устранении ограничений на траекторию ЛА, достигаемый с помощью формирования эталонного радиолокационного изображения в процессе движения с помощью цифровых моделей местности, заранее подготовленных на основе цифровых карт местности.
Технический результат предлагаемого решения достигается тем, что для оценки навигационных ошибок инерциальной системы управления выполняют следующие действия: формируют эталонное РЛИ заданного участка местности в процессе движения ЛА по траектории с помощью цифровых моделей местности, предварительно подготовленных на основе цифровых векторных карт местности; получают рабочее РЛИ того же участка местности; осуществляют расчет двумерной матрицы ВКФ эталонного и рабочего РЛИ, совместно используя площадные и точечные ориентиры изображений; находят максимум ВКФ; оценивают положение максимума; используют оценку положения максимума для оценки навигационных ошибок инерциальной системы управления.
Отличительным признаком предлагаемого способа от прототипа является то, что формирование эталонного РЛИ осуществляется в процессе движения ЛА с помощью цифровых моделей местности, предварительно подготовленных на основе цифровых векторных карт земной поверхности. Таким образом, траектория может быть выбрана или скорректирована непосредственно в процессе движения ЛА.
Цифровая модель местности в данном случае представляет собой три матрицы данных, которые далее будем называть полетным заданием. Первая матрица данных полетного задания содержит значения высот участка земной поверхности. В матрице учтены высоты заданного набора естественных и искусственных объектов (зданий, лесных массивов и т.п.). На фиг.1 показан фрагмент этой матрицы. Вторая матрица содержит значения удельных эффективных поверхностей рассеяния (УЭПР) участка земной поверхности. Каждый элемент матрицы УЭПР содержит значение УЭПР объекта, координаты которого совпадают с координатами данного элемента. Для элементов, соответствующих рельефу, в матрице содержится некоторое число, характеризующее УЭПР рельефа. Значение УЭПР объектов выбирается из заданного набора с учетом типа объектов. Третья матрица содержит значения углов ориентации заданных типов объектов, а именно значение угла между продольной осью объекта и осью ОХ системы координат матриц.
Эти матрицы заданы в одной системе координат, которая определяется следующим образом. В полетном задании определены координаты ПТ в геодезической системе координат. Вводится земная система координат (СК) с началом в ПТ. Ось X направлена вдоль меридиана на север, ось Y - вертикально вверх, ось Z - вдоль параллели на восток, дополняя СК до правой. На фиг.2 показано расположение осей этой СК относительно земной поверхности. Эта СК вводится для малой окрестности ПТ, поэтому вместо геодезической используется прямоугольная декартова СК. В этой СК относительно ПТ задана прямоугольная сетка координат. Размер сетки определяется максимальным размером эталонного РЛИ и максимальной ошибкой инерциальной системы управления.
Положение прямоугольной сетки в земной СК показано на фиг.3. Данная сетка однозначно задается точкой начала координат, шагом сетки и количеством элементов сетки. Начало координат сетки совпадает с началом координат земной СК. Общий объем данных полетного задания не превышает 1 мегабайт.
Эталонное РЛИ рассчитывается в процессе движения ЛА для одной или нескольких точек коррекции траектории. Эта процедура производит расчет геометрической видимости всех элементов матрицы высот ПЗ из заданной точки формирования (ТФ) на траектории ЛА. Каждый из элементов матрицы вносит вклад в матрицу РЛИ пропорционально своей видимой площади, значению УЭПР и коэффициенту диаграммы обратного рассеяния (ДОР). Таким образом, эффектами интерференции и дифракции радиоволн пренебрегают, ограничиваясь лишь учетом прямой видимости.
В каждой точке коррекции эталонное РЛИ рассчитывается в полярной системе координат, присущей радиолокационному датчику. Полярная сетка координат «дальность-азимут» формируется вокруг ПТ для заданных значений границ строба дальности Rmin и Rmax и границ сектора обзора по азимуту Bbeg и Bend. Поскольку узлы полярной сетки могут не совпадать с узлами прямоугольной, требуется пересчет высот местности из узлов одной сетки в узлы другой. На фиг.4 показан пример взаимной ориентации двух координатных сеток. Для нахождения высот местности в узлах полярной сетки применяется двумерная интерполяция методом «ближайшего соседа».
Для расчета затенения объектами друг друга по дальности используется метод «плавающего горизонта» [3]. При этом для каждой линии равной дальности вводится мелкая азимутальная сетка, которая помогает более точно учесть затенение. Она формируется путем равномерного разбиения каждого азимутального элемента полярной сетки эталонного РЛИ в заданное число раз.
Методом «плавающего горизонта» последовательно обрабатываются высоты местности, лежащие на изодалях полярной сетки. Для всех азимутальных направлений текущей изодали определяются углы места, под которыми каждая точка наблюдается из ТФ. Эти значения поэлементно сравниваются с массивом углов места, которые задают текущую линию «плавающего горизонта». Начальный массив «плавающего горизонта» инициализируется значениями углов места первой изодали эталонного РЛИ. Значения углов места текущей изодали, превышающие одноименные значения в массиве «плавающего горизонта», заменяют последние. Таким образом, обновляется «плавающий горизонт». Затем вычисляются приращения углов места между текущей изодалью и линией горизонта. На основе этих значений рассчитывается массив видимых площадей участков местности текущей изодали как площади их проекций на направление текущей наклонной дальности.
Каждый элемент матрицы эталона определяется произведением видимой площади текущего участка местности на УЭПР и на коэффициент диаграммы обратного рассеяния (ДОР). Схема определения ЭПР местности представлена на фиг.5.
Рассчитанная таким способом матрица эталонного РЛИ подвергается пороговой обработке для выделения информативных признаков, которые будут использоваться при определении ошибок навигации. Выделяется два типа информативных признаков: «яркие точки» и «тени». Первый тип представляет собой множество пространственно локализованных на эталоне особенностей, обладающих высокой ЭПР. Второй тип - это множество пространственно распределенных на эталоне особенностей (площадок заданного размера), обладающих низкой ЭПР. Характеристиками каждого экземпляра признаков обоих типов является пара координат в НЗСК.
Эталонное РЛИ представляет собой матрицу Aet мощности сигналов, «отраженных» от элементарных участков местности и расположенных в узлах полярной сетки. Для каждого узла заданы декартовы координаты в НЗСК, которые хранятся в матрицах Xet и Zet одинаковой размерности. Число линий сетки эталона по азимуту nAz равно числу столбцов матрицы Aet. Число линий сетки эталона по дальности ND равно числу строк матрицы Aet.
Эталонное радиолокационное изображение местности разбивается на отдельные парциальные кадры, сдвинутые по азимуту (соседние кадры имеют зону взаимного перекрытия площадью 33% от площади кадра). Расположение кадров эталонного РЛИ показано на фиг.6. Далее производится обработка каждого кадра эталонного РЛИ двумерным адаптивным фильтром для выделения теней. Схема обработки парциального кадра представлена на фиг.7.
Адаптивный порог кадра РЛИ рассчитывается для каждого парциального кадра с помощью «скользящего» по дальности окна и используется для обнаружения теней. Величина адаптивного порога на k-том шаге рассчитывается по формуле
где m - номера дальности, n - номера азимута кадра РЛИ, NF - ширина парциального кадра РЛИ по азимуту, nFiltrR - ширина окна по дальности. Значения адаптивного порога запоминаются в отдельном массиве. Вычисляем глобальный порог эталонного РЛИ для обнаружения «теней» по формуле
где kShad - задаваемый коэффициент порога для выделения теней.
Осуществляем обнаружение теней путем сравнения массива адаптивного порога со значением глобального порога всех парциальных кадров эталонного РЛИ. Массивы координат «теней» в НЗСК XshEt и ZshEt формируются путем выбора из матриц Xet и Zet тех элементов, которые соответствуют положению обнаруженных «теней».
«Яркие» точки эталонного РЛИ обнаруживаются на эталонном РЛИ путем сравнения элементов матрицы Aet с глобальным порогом PorEt. Величина порога рассчитывается путем умножения величины PORsh на коэффициент, больший единицы. Если элемент превысил порог, запоминаем его значение и координаты в массивах Asum, XtarEt и ZtarEt соответственно.
Проведем дополнительную селекцию «ярких» точек с помощью оконтуривания, а именно выберем из найденных NptsForCorr штук по следующему алгоритму. Пока количество отобранных точек меньше NptsForCorr, находим максимальный элемент массива Asum. Если величина найденного максимума больше нуля, то продолжаем процедуру оконтуривания. Иначе прекращаем процедуру, поскольку исходных точек оказалось меньше, чем заданное количество.
Сохраняем координаты Z и X найденного максимума в массивах координат оконтуренных «ярких» точек. Затем находим все точки, координаты которых попадают в окрестность ±dZ и ±dX текущего максимума, и обнуляем их амплитуды в массиве Asum. Переходим к поиску следующего максимума.
Результатом пороговой обработки эталонного РЛИ являются массивы мощностей «ярких» точек Asum и их координат XtarEt и ZtarEt в НЗСК, а также массивы координат «теней» XshEt и ZshEt в НЗСК.
Описанные выше действия выполняются в процессе движения ЛА по траектории до момента достижения точки коррекции траектории. Перед получением рабочего РЛИ в точке коррекции траектории выполняется процедура оценки вектора собственной скорости ЛА и его высоты над местностью в малой окрестности ПТ. Это делается с целью сокращения объема расчетов при цифровой обработке сигнала рабочего РЛИ и снижения вероятности неверной выставки антенны по углу места при получении рабочего РЛИ.
При измерении вектора скорости производится сканирование антенны в секторе углов от 0° до 50° по азимуту. В течение всего сканирования формируется 20-30 парциальных рабочих РЛИ. По каждому из них определяется доплеровский сдвиг частоты по алгоритму, описанному в [1], средний угол места ярких точек на РЛИ и определяется средняя высота ЛА относительно этих ярких точек. По окончании сканирования производится оценка вектора собственной скорости ЛА, высоты и угла места цели относительно ЛА.
По значениям дальности и угла места «ярких» точек определяется высота ЛА над каждой из них, а затем вычисляется средняя высота «ярких» точек в k-м парциальном кадре РЛИ. Оценка высоты ЛА над местностью в окрестности ПТ рассчитывается путем усреднения высот «ярких» точек по множеству парциальных кадров. Используя оценку высоты и зная координаты ПТ и текущие координаты ЛА, определяется угол места ПТ Ept.
Рабочее РЛИ формируется в режиме секторного обзора (СО) [2]. Антенная система производит сканирование в секторе от Bbeg до Bend по азимуту со скоростью omega_ant. Причем для границ сектора выполняется условие: |Bbeg|>|Bend|. С учетом движения носителя за время сканирования это позволит охватить лучом ДН более широкий сектор местности. В угломестной плоскости положение антенны задает величина Ept, рассчитанная на предыдущем этапе. Она позволяет сориентировать ось ДН на ПТ. Сканирование осуществляется в НСК. Это позволяет стабилизировать положение пятна засветки на местности и ослабить влияние на рабочее РЛИ траекторных нестабильностей ЛА.
В процессе сканирования производится излучение и прием N пачек импульсов. Согласованная цифровая обработка каждой пачки позволяет получить N парциальных кадров (изображений), из которых затем формируется полный кадр рабочего РЛИ. Для получения парциальных кадров рабочего РЛИ используется алгоритм сигнальной обработки с обратным порядком расчета. Особенностью данного алгоритма является дуальный порядок выполнения операций, а именно: сначала выполняется межпериодная, затем - внутрипериодная обработка пачки импульсов. Причем последняя проводится только для заранее определенных периодов пачки, соответствующих положению спектра доплеровских частот в пределах ширины ДНА. Выбор периодов производится с помощью выражений из [1]. Для реализации обратного порядка расчетов требуется достаточно точная оценка вектора скорости носителя. В качестве такой оценки используются результаты процедуры, описанной выше. Межпериодная обработка состоит из операций умножения отсчетов отраженного сигнала на окно Хемминга и прямого БПФ. Внутрипериодная обработка заключается в согласованной фильтрации отраженного сигнала в спектральной области. Такая обработка позволяет в среднем в 4 раза сократить время внутрипериодной обработки сигнала.
Результатом такой обработки является набор парциальных кадров рабочего РЛИ местности, сдвинутых по азимуту. Каждый кадр представлен в виде матрицы. Ее элементы расположены в полярной сетке; каждый элемент этой матрицы равен квадрату амплитуды сигнала, отраженного от соответствующего участка местности.
Производим обработку матрицы амплитуд каждого парциального кадра с целью обнаружения «теней» тем же алгоритмом, который применяется для эталонного РЛИ.
Затем сравнением с глобальным порогом производим обнаружение «ярких точек». Для всех превышений порога рассчитываем моноимпульсный пеленг для текущего элемента, превысившего порог. Затем проверяем рассчитанный пеленг на достоверность. Если абсолютное значение пеленга не превышает половину ширины ДНА, то переходим к расчету декартовых координат «яркой» точки в НЗСК, иначе переходим к сравнению с порогом следующего элемента массива Atek. При расчете координат точек должны использоваться интерполированные данные ИСУ о положении объекта в НЗСК Zo, Хо,
В результате пороговой обработки каждого парциального кадра рабочего РЛИ получены массивы мощностей «ярких» точек и их координат в НЗСК. Поскольку кадры частично перекрываются, полученное множество обладает избыточностью. Проводим некогерентное накопление мощностей «ярких» точек в декартовой сетке для уменьшения спекл-шума и количества точек. После некогерентного накопления проводится дополнительная обработка матрицы мощностей «ярких» точек двумерным сглаживающим фильтром размера 3×3. Оконтуривание «ярких» точек выполняется по алгоритму, аналогичному использовавшемуся для эталонного РЛИ. Таким образом, определяются «яркие» точки рабочего РЛИ, предназначенные для корреляционного сравнения с эталонным РЛИ.
Сопоставление эталонного и рабочего РЛИ проводится путем расчета пары взаимно корреляционных функций (ВКФ): по «ярким» точкам и «теневым» участкам и последующего их объединения. Координаты «ярких» точек и «теневых» участков обоих РЛИ в нормальной земной системе координат (НЗСК) несут информацию о взаимном положении этих РЛИ в горизонтальной плоскости.
Учитывая возможное рассогласование между двумя РЛИ по углу поворота, при расчете взаимной корреляции проводится поиск наиболее вероятного угла поворота. Критерием поиска является максимум объединенной ВКФ «ярких» точек и «теней». Задается массив тестовых углов взаимного поворота РЛИ и для каждого угла вычисляются соответствующие ВКФ двух РЛИ. Из этих ВКФ выбирается одна согласно указанному критерию. Фиг.8 демонстрирует, что угол поворота эталона для выбранной ВКФ равен минус 2.2°. При заданных параметрах корреляционного сравнения вычисляется взаимный линейный сдвиг двух РЛИ по обеим осям НЗСК, а также величина взаимного углового сдвига этих РЛИ.
Взаимнокорреляционная функция двух РЛИ вычисляется по координатам точек эталона относительно каждой точки рабочего РЛИ (относительные положения).
Вычисление ВКФ двух РЛИ производится по следующему алгоритму.
1. Эталонное РЛИ поворачиваем относительно точки съема на заданный угол.
2. Инициализируем массив значений ВКФ и массив адресов точек эталона.
3. Поочередно рассматриваем каждую яркую точку рабочего РЛИ.
4. Вычисляем относительные адреса как разность координат точек эталонного РЛИ относительно текущей точки рабочего РЛИ.
5. Увеличиваем значения элементов массива ВКФ с вычисленными адресами на единицу.
6. Переходим к следующей яркой точке рабочего РЛИ и повторяем пункты 4)-5).
После вычисления взаимных позиций точек эталона относительно всех точек рабочего РЛИ будет сформирована матрица значений ВКФ. Аналогичная процедура производится с массивами координат «теневых» участков двух изображений. Затем выполняется объединение двух ВКФ посредством поэлементного перемножения.
Выполняется поиск максимального элемента матрицы ВКФ. Информация о величине и направлении сдвига двух РЛИ заключена в координатах максимума в матрице ВКФ.
Процедура расчета ВКФ и поиск максимума повторяется для всех углов поворота эталонного РЛИ. При этом производится селекция самого большого максимума ВКФ. Таким образом, выбирается оптимальный угол поворота эталона относительно рабочего РЛИ. Положение максимума в матрице ВКФ позволяет рассчитать искомую навигационную ошибку летательного аппарата в момент съема рабочего РЛИ. Она характеризуется тремя следующими величинами: углом поворота эталонного РЛИ относительно рабочего РЛИ; линейным сдвигом эталонного РЛИ относительно рабочего РЛИ по оси X в НЗСК; линейным сдвигом эталонного РЛИ относительно рабочего РЛИ по оси Z в НЗСК.
Для проверки предлагаемого алгоритма навигации были проведены экспериментальные исследования. Алгоритм был опробован в серии натурных экспериментов на местности с городской застройкой. В процессе полета ЛА выполнялась запись сигнала рабочего РЛИ, а затем в лабораторных условиях проводилась его обработка, расчет и обработка эталона, корреляционное сопоставление двух РЛИ. На фиг.9 показана цифровая карта одного из рабочих участков местности. Рабочее РЛИ этой местности представлено на фиг.10. Здесь имеются «яркие точки» жилых домов, отдельно стоящих зданий, кромки леса, а также особенно ярко выделяются отражения от лесополосы вдоль железной дороги (полоса вверху изображения). На фиг.11 показано эталонное РЛИ, рассчитанное с помощью цифровой векторной карты местности. После корреляционного сравнения с рабочим РЛИ с поиском по углу поворота получаем набор ВКФ двух изображений. На фиг.12 и 13 показана ВКФ с максимальным пиком, выбранная для оценки рассогласования между двумя изображениями. ВКФ имеет один четко выраженный максимум, наибольший уровень боковых лепестков равен -4 дБ относительно максимума. Достоверность распознавания проверялась наложением ярких точек на карту местности при полученных оценках рассогласования.
Таким образом, предлагаемый способ оценки навигационных ошибок практически применим и обладает рядом существенных преимуществ перед прототипом и аналогами.
Литература
1. Козаев А.А., Колтышев Е.Е., Фролов А.Ю., Янковский В.Т. Алгоритм доплеровского измерения скорости в РЛС с синтезированной апертурой. // Радиотехника, 2005, №6, с.13.
2. Кондратенков Г.С., Фролов А.Ю. Радиовидение. Радиолокационные системы дистанционного зондирования Земли. - М.: Радиотехника, 2005.
3. Дж. Ту, Р.Гонсалес. Принципы распознавания образов. - М.: Мир, 1978.
4. US №4914734, 21.07.1989, G01S 13/86.
5. US №5430445, 12.31.1992, G01S 13/90.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА ПО РАДИОЛОКАЦИОННЫМ ИЗОБРАЖЕНИЯМ ЗЕМНОЙ ПОВЕРХНОСТИ | 2011 |
|
RU2483324C1 |
| СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА ПО РАДИОЛОКАЦИОННЫМ ИЗОБРАЖЕНИЯМ ЗЕМНОЙ ПОВЕРХНОСТИ | 2014 |
|
RU2564552C1 |
| СПОСОБ ОЦЕНКИ ВЫСОТЫ ПОЛЕТА ЛЕТАТЕЛЬНОГО АППАРАТА ПО РАДИОЛОКАЦИОННЫМ ИЗОБРАЖЕНИЯМ ЗЕМНОЙ ПОВЕРХНОСТИ | 2012 |
|
RU2499279C1 |
| Способ формирования изображения земной поверхности в радиолокационной станции с синтезированием апертуры антенны | 2016 |
|
RU2614041C1 |
| СПОСОБ ОДНОЛУЧЕВОГО ИЗМЕРЕНИЯ ВЫСОТЫ И СОСТАВЛЯЮЩИХ СКОРОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО РАДИОВЫСОТОМЕРА, РЕАЛИЗУЮЩЕГО СПОСОБ | 2013 |
|
RU2551896C2 |
| СПОСОБ ОДНОЛУЧЕВОГО ИЗМЕРЕНИЯ ВЫСОТЫ И СОСТАВЛЯЮЩИХ СКОРОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО РАДИОВЫСОТОМЕРА, РЕАЛИЗУЮЩЕГО СПОСОБ | 2013 |
|
RU2550081C2 |
| СПОСОБ ИЗМЕРЕНИЯ ВЫСОТЫ, ИСТИННОЙ СКОРОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА И НАКЛОНА ВЕКТОРА СКОРОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА ОТНОСИТЕЛЬНО ГОРИЗОНТА, УСТРОЙСТВО БОРТОВОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ, ИСПОЛЬЗУЮЩЕЕ СПОСОБ | 2016 |
|
RU2643168C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ЛЕТАТЕЛЬНОГО АППАРАТА ПО РАДИОЛОКАЦИОННОМУ ИЗОБРАЖЕНИЮ | 2017 |
|
RU2656366C1 |
| СПОСОБ ПОВЫШЕНИЯ РАДИОЛОКАЦИОННОГО РАЗРЕШЕНИЯ, СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ И СПОСОБ ДИСТАНЦИОННОГО ВЫЯВЛЕНИЯ СИСТЕМОЙ МАЛОРАЗМЕРНЫХ ОБЪЕКТОВ | 2004 |
|
RU2265866C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОШИБКИ ИЗМЕРЕНИЯ СКОРОСТИ ЛА ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМОЙ И БОРТОВОЙ НАВИГАЦИОННЫЙ КОМПЛЕКС ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2008 |
|
RU2411538C2 |
Изобретение относится к радиолокации, в частности к радиолокационным средствам навигации летательных аппаратов. Достигаемый технический результат заключается в повышении вероятности правильной идентификации положения летательного аппарата (ЛА) и обеспечивается путем использования площадных и точечных ориентиров при сопоставлении эталонного и рабочего изображений, и устранении ограничений на траекторию ЛА, достигаемый с помощью формирования эталонного радиолокационного изображения (РЛИ) в процессе движения с помощью цифровых моделей местности, заранее подготовленных на основе цифровых карт местности. Сущность изобретения состоит в том, что оценку навигационных ошибок инерциальной системы управления получают с помощью параметров максимума двумерной взаимокорреляционной функции (ВКФ) эталонного и рабочего РЛИ, причем эталонное РЛИ рассчитывают в процессе движения ЛА с помощью цифровых моделей местности, подготовленных заранее на основе цифровых карт местности. Оценку ошибки по курсовому углу получают путем выбора наибольшего максимума на множестве двумерных ВКФ, рассчитываемых для заданного диапазона углов поворота системы координат эталонного РЛИ. Расчет ВКФ выполняется для пары множеств информативных объектов: «ярких» точек и «теней», выделяемых на рабочем и эталонном РЛИ с помощью процедуры адаптивной пороговой обработки. Для расчета ВКФ используются пары декартовых координат «ярких» точек и «теней». 13 ил.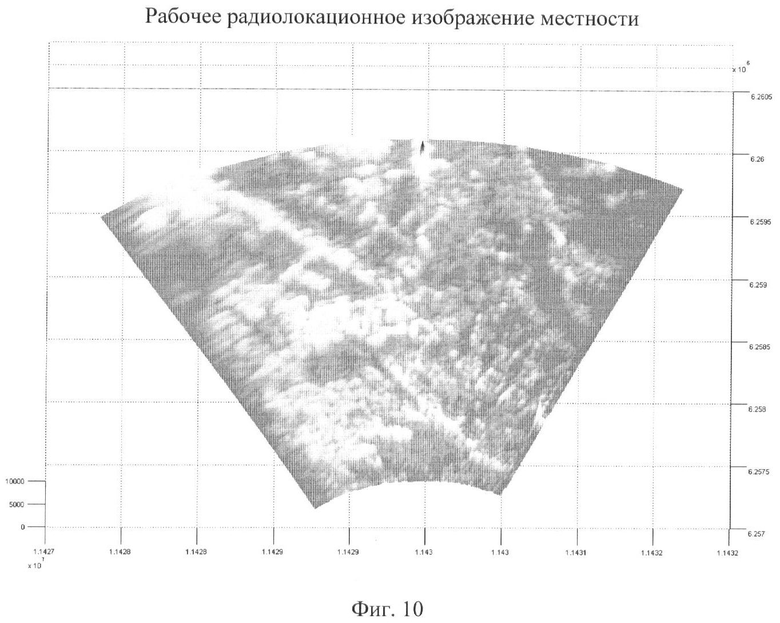
Способ навигации летательного аппарата (ЛА) по полю радиолокационного контраста земной поверхности, заключающийся в том, что оценку навигационных ошибок инерциальной системы управления (ИСУ) получают путем оценки данных максимума двумерной взаимокорреляционной функции (ВКФ) эталонного и рабочего радиолокационных изображений (РЛИ), подвергнутых обработке по выделению локальных перепадов градиента яркости, причем рабочее РЛИ подготавливают в процессе движения ЛА с помощью радиолокационной станции (РЛС) с синтезированием апертуры, отличающийся тем, что эталонное РЛИ рассчитывают в процессе движения ЛА в виде матрицы значений эффективной поверхности рассеяния (ЭПР) в полярной сетке координат «дальность-азимут» на основе трех матриц данных одинакового размера: высот местности с учетом искусственных объектов, удельной ЭПР и углов ориентации искусственных объектов; матрицы задают в регулярной декартовой сетке координат, причем преобразование сеток координат осуществляют с помощью двумерной интерполяции методом «ближайшего соседа», а учет видимости элементов матрицы высот из точки наблюдения производят методом «плавающего горизонта»; выделяют путем пороговой обработки эталонного и рабочего РЛИ два множества объектов: множество «ярких» точек определяют по превышению значения глобального порога всех парциальных кадров эталонного РЛИ, рассчитываемого на основании матрицы мощности сигналов, отраженных от элементарных участков местности, на основании задаваемого коэффициента порога для выделения «теней», и затем умножения на коэффициент больший единицы, причем для уменьшения их числа используют группировку близко расположенных точек в одну; множество «теней» определяют как участки прямоугольной формы фиксированного размера, в каждой точке которых значение адаптивного порога, рассчитываемого для каждого парциального кадра, соответствующего РЛИ местности, с помощью скользящего окна по дальности, находится ниже величины глобального порога; каждый объект описывают парой декартовых координат; рассчитывают для каждого множества объектов двумерную матрицу ВКФ рабочего и эталонного РЛИ, для чего для каждой пары объектов рассчитывают разности их координат, после их округления определяют индексы элемента матрицы ВКФ, в который прибавляют единицу; двумерную ВКФ эталонного и рабочего РЛИ рассчитывают как произведение ВКФ «ярких» точек и ВКФ «теней»; проводят процедуру расчета матрицы ВКФ для заранее заданного набора курсовых углов ЛА, для чего систему координат эталонного РЛИ поворачивают на заданный угол; при этом находят угол поворота, при котором оценка максимального значения в матрице ВКФ будет наибольшей; для найденного максимума ВКФ рассчитывают оценки навигационных ошибок ИСУ через индексы положения максимума в матрице ВКФ.
| US 5430445 А, 04.07.1995 | |||
| СПОСОБ ПОСТРОЕНИЯ ДВУМЕРНОГО РАДИОЛОКАЦИОННОГО ИЗОБРАЖЕНИЯ ПРЯМОЛИНЕЙНО ЛЕТЯЩЕЙ ЦЕЛИ ПРИ МНОГОЧАСТОТНОМ УЗКОПОЛОСНОМ ЗОНДИРОВАНИИ | 1995 |
|
RU2099743C1 |
| RU 2066060 C1, 27.08.1996 | |||
| СПОСОБ ПОЛУЧЕНИЯ ТРЕХМЕРНОГО РАДИОЛОКАЦИОННОГО ИЗОБРАЖЕНИЯ ПОВЕРХНОСТИ | 2005 |
|
RU2290663C1 |
| WO 2007057707 A1, 24.05.2007 | |||
| US 6914553 B1, 05.07.2005 | |||
| US 2005062639 A1, 24.03.2005. | |||

