Заявленное техническое решение относится к измерительной технике и может быть использовано для точного и долговременного измерения механических усилий или деформаций конструкций в самых различных областях техники.
Известно «Устройство для измерения нагрузок» по авторскому свидетельству СССР: SU 213385 от 12.03.1966 года, кл. 42k, 7/02 - [1], содержащее упругий элемент - трансформатор механических деформаций (ТМД) в виде двутавра, к полкам которого прикреплены проволочные тензоэлементы.
Недостатком известного устройства [1] является то, что показания применяемых в нем тензоэлементов сильно зависят от температуры, что существенно снижает точность измерений. Кроме того, материалы тензоэлементов подвержены «старению», то есть со временем растягиваются, и имеют ограниченное число циклов измерений.
Известно «Устройство для измерения усилий» по авторскому свидетельству СССР: SU 514212 от 15.15.1976 года, МПК G01L 1/16 - [2], содержащее ТМД в виде П-образной пластины с прорезью в перекладине, образующей две параллельные перемычки, на которые с одной стороны установлены ПЧЭ в виде пьезокварцевых резонаторов.
Недостатком известного устройства [2] является то, что внутренние углы П-образной пластины являются концентраторами напряжений. Поэтому, ввиду хрупкости пластины из пьезоактивного материала, этот датчик может нагружаться только сравнительно небольшими силами сжатия или растяжения, в результате чего ограничивается область его использования, ввиду малых деформаций П-образной пластины. Кроме того, крепление пьезокварцевых резонаторов на ТМД из металла затруднительно, ввиду чего такие датчики обладают невысокой надежностью.
Известно «Устройство для измерения силы сжатия» по патенту Российской Федерации: RU 2320968 от 27.03.2008 г., МПК G01L 1/16 - [3], содержащее корпус, ТМД в виде тарельчатой пружины с осевым толкателем и Г-образной консолью, закрепленная часть которой на внутренней и наружной поверхностях имеет прорези, обеспечивающие изгиб консоли по длине прорезей, в которых установлены ПЧЭ в виде пьезокварцевых резонаторов.
Недостатки аналога [3] следующие:
- в качестве ТМД используется металлическая (стальная) Г-образная пластина, что создает трудности надежной установки на нее двух ПЧЭ, один из которых будет работать на сжатие, а другой на растяжение, особенно работающего на растяжение. Установка ПЧЭ на металле возможна, преимущественно, только клеевым способом, а это требует дополнительных затрат и ручного труда, а также ведет к уменьшению точности из-за демпфирования изгибающих усилий прослойкой клея;
- большая разность в коэффициентах линейных расширений стальной пластины и ПЧЭ (кварцевого материала), что задает применение устройства в узких температурных диапазонах, снижает его функциональность и увеличивает погрешности измерений. При существенных изменениях температурных условий в высокую или низкую стороны нарастает напряженность клееной конструкции вплоть до ее разрушения;
- установленные на стальной Г-образной пластине две ПЧЭ ввиду несимметричности последней будут работать неодинаково и вносить искажения в работу чувствительного элемента датчика;
- устройство работает только на сжатие, что сужает его область применения.
Известен «Индукционный преобразователь линейных перемещений» по авторскому свидетельству СССР: SU 1516751 от 23.10.1989 г., МПК G01B 7/00 - [4], содержащий подвижную и неподвижную части из диэлектрического материала в виде коаксиальных трубок с продольными разрезами и с нанесенными на них печатными зигзагоподобными прямоугольными обмотками, активные проводники которых взаимно параллельны и расположены с одинаковым шагом.
Известен «Датчик положения» по патенту США: US 2942212 от 21.06.1960 г., Кл. 336-30 - [5], содержащий подвижную и неподвижную части из диэлектрического материала с нанесенными на них печатными зигзагоподобными прямоугольными обмотками, активные проводники которых взаимно параллельны и расположены с одинаковым шагом.
Общим недостатком известных датчиков положения [4] и [5] является, то, что они в своем представленном виде не могут быть применены для измерения механических усилий. Кроме того, показания датчиков [4] и [5] сильно зависят от зазора между их обмотками, что требует прецизионного изготовления датчиков, что усложняет их конструкцию и сильно ее удорожает.
Прототипом заявляемого технического решения является «Индуктивный датчик перемещений» по патенту Российской Федерации: RU 2367902 от 20.09.2009 г., МПК G01B 7/00 - [6], содержащий ТМД с взаимно перемещающимися поверхностями, на которых закреплены соответственно две индуктивности (пара индуктивностей), проводники каждой из них выполнены в форме плоского прямоугольного меандра и расположены на внутренних поверхностях параллельных диэлектрических подложек, смещенных в исходном положении относительно друг друга на четверть периода меандра, выходы индуктивностей с одной стороны соединены между собой гибкими проводниками, а с другой стороны - с обкладками конденсатора, с образованием колебательного контура в составе генератора переменного напряжения, частота генерации которого зависит от резонансной частоты колебательного контура, и выходы являются входами регистрирующего устройства.
Недостатки прототипа [6] следующие:
- зависимость резонансной частоты автоколебательного контура от температуры, что сужает диапазон измерений по температуре и снижает их точность;
- сильная зависимость показаний от величины зазора между подвижными относительно друг друга плоскими индуктивностями.
Недостатки прототипа ставят задачи повышения точности измерения упругих деформаций и минимизации температурных погрешностей индуктивного датчика.
Указанная задача решается тем, что в «Индуктивном датчике силы», содержащем ТМД с взаимно перемещающимися поверхностями, на которых соответственно закреплена на параллельных диэлектрических подложках пара индуктивностей в форме плоского прямоугольного меандра, ТМД выполнен симметричным перпендикулярно оси приложения силы и содержит две пары параллельных взаимно перемежающихся боковых поверхностей, на которых соответственно закреплены две пары индуктивностей, индуктивности каждой пары установлены с зазором относительно друг друга, одна из каждой пары индуктивностей соединена с источником переменного напряжения, а выходы двух других из каждой пары индуктивностей являются выходом датчика силы.
Кроме того, известно выполнение «Схемы с линейно регулируемым дифференциальным трансформатором LVDT в качестве датчика перемещения или датчика силы и способ использования такой схемы» по патенту Германии: DE 10313021 В3 от 02.09.2004 года, МПК G01B 7/02 - [7], с одной первичной обмоткой и двумя вторичными обмоткам, выходы которых через соответственно два интегратора подсоединены к сумматору, выход которого подключен к разъему внешнего электрического устройства.
Однако в известном аналоге [7] и в заявляемом техническом решении имеются существенные отличия. Так, в аналоге [7] из задающего генератора на первичную обмотку подаются «треугольные» сигналы (импульсы) с регулируемыми передними и задними фронтами, а в заявляемом техническом решении из задающего генератора на первичную обмотку подаются синусоидальные сигналы, и между катушками нет сердечника, что позволяет повысить рабочие частоты и соответственного чувствительность индукционного датчика.
Введение в формулу изобретения признака: «трансформатор механических деформаций выполнен симметричным перпендикулярно оси приложения силы и содержит две пары параллельных взаимно перемежающихся боковых поверхностей, на которых соответственно закреплены две пары индуктивностей, индуктивности каждой пары установлены с зазором относительно друг друга», позволяет компенсировать влияние изменения зазора между индуктивностями. Так, когда в одной паре индуктивностей зазор увеличится на определенную величину, то точно на такую же величину уменьшится зазор в другой паре индуктивностей, а суммарный сигнал останется неизменным.
Введение в формулу изобретения признака: «одна из каждой пары индуктивностей соединена с источником переменного напряжения, а выходы двух других из каждой пары индуктивностей являются выходом датчика силы» необходимо для реализации системы питания индуктивного датчика силы и снятия с него показаний.
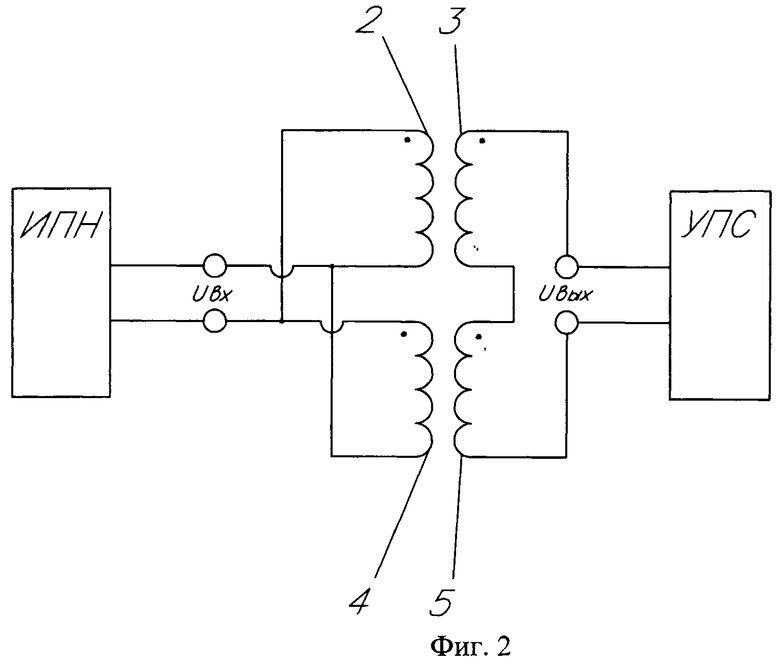
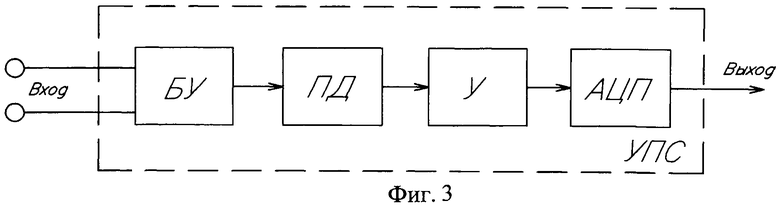
На фиг.1 представлена схема индукционного датчика силы. На фиг.2 - эквивалентная схема индукционного датчика силы с двумя парами индуктивностей. На фиг.3 - схемотехническое решение для обеспечения работоспособности датчика по фиг.2. На фиг.4 представлен вид (фотография) индукционного датчика силы спереди. На фиг.5 - вид (фотография) индукционного датчика силы сзади. На фиг.6 - вид (фотография) индукционного датчика силы сверху. На фиг.7 - фотография одной из четырех индуктивностей, в форме плоского прямоугольного меандра на диэлектрической подложке.
Индукционный датчик силы содержит ТМД 1, выполненный симметричным перпендикулярно оси приложения силы, и имеет две пары параллельных взаимно перемежающихся боковых поверхностей, на которых соответственно закреплены две пары индуктивностей 2, 3 и 4, 5 в форме плоского прямоугольного меандра. Пары индуктивностей 2, 3 и 4, 5 размещены на параллельных диэлектрических подложках. Индуктивности каждой пары установлены с зазором относительно друг друга. Одна из каждой пары индуктивностей 2 и 4 подсоединена к источнику переменного напряжения, а выходы двух других из каждой пары индуктивностей 3 и 5 являются выходом датчика силы.
На фиг.1 и фиг.2: ИПН - источник переменного напряжения, предпочтительно 1÷10 МГц, УПС - устройство преобразования сигнала. На фиг.3: БУ - буферный усилитель, предназначен для согласования выхода индуктивного датчика силы с входом УПС; ПД - пиковый детектор, предназначен для преобразования переменного сигнала в сигнал переменного напряжения; У - масштабный усилитель, предназначен для согласования амплитуды выходного сигнала с масштабом шкалы аналого-цифрового преобразователя (АЦП), с выхода которого сигнал передается на индикацию или на индикацию или на микропроцессор. Для реализации данной схемы УПС (по фиг.3) могут быть использованы традиционные схемотехнические решения. В частности, при использовании АЦП с частотой преобразования, большей, чем частота ИПН (1÷2 МГц и более), сигнал с выхода индуктивного датчика силы может быть сразу подан на вход масштабного усилителя У.
Реально для рабочих частот порядка 2-х МГц в габаритных размерах пар индуктивностей (2, 3 и 4, 5) 84×22 мм, шагом проводников всех индуктивностей, равным 0,8 мм, при ширине проводников 0,4 мм и воздушном зазоре между подвижной и неподвижной частью 0,1 мм рабочая зона по взаимному перемещению пар индуктивностей составляет 0,2 мм, при нагрузке силой на ТМД до 900 кг. При этом диапазон изменения выходного сигнала составляет ±2 В с погрешностью преобразования не хуже ±0,5%.
Конструктивно-технологические характеристики (ширина и шаг проводников, выбор материалов, размеры датчика и т.д.) могут быть изменены под конкретные технические требования. Современная технология печатных плат позволяет изготавливать печатные катушки с высокой степенью точности, в связи с этим, при необходимости получения более высокой точности преобразования, требования к шагу и ширине проводников, а также к воздушному зазору между катушками могут быть и более жесткими.
Работает индуктивный датчик силы следующим образом. При приложении силы (нагрузки) к ТМД 1, последний сжимается в пределах упругих деформаций, что приводит к одинаковому смещению индуктивностей 2 и 4 (излучающих) относительно индуктивностей 3 и 5 (приемных) в каждой паре индуктивностей. Это приводит и изменению (увеличению) амплитуды суммарного выходного сигнала индуктивного датчика силы, пропорционально приложенной нагрузке к ТМД 1. При этом при возможных боковых смещениях ТМД 1 зазоры в парах индуктивностей 2, 3 и 4, 5 будут изменятся обратно пропорционально. Когда один зазор уменьшается, другой увеличивается, что позволяет компенсировать влияние изменения зазора между индуктивностями, так как суммарный сигнал индукционного датчика силы останется неизменным. Так же будет себя вести индукционный датчик силы при возможных температурных деформационных изменениях.
Как видно из вышеизложенного, наиболее целесообразно использовать такой индукционный датчик силы в системах контроля деформационных сил различных объектов. Заявленное техническое решение позволит существенно повысить точность измерения деформаций, минимизировать зависимость показаний датчика от температуры и повысить длительность его эксплуатации.
Полагаем, что предложенный индукционный датчик силы обладает всеми критериями изобретения, так как совокупность ограничительных и отличительных признаков формулы изобретения является новой для конструкций индукционных датчиков силы и, следовательно, соответствует критерию "новизна".
Совокупность признаков формулы изобретения предложенного устройства не известна на данном уровне развития техники и не следует общеизвестным правилам разработки и конструирования индукционных датчиков силы, что доказывает соответствие критерию "изобретательский уровень".
Разработка, конструирование и внедрение предложенного индукционного датчика силы не представляют никаких конструктивно-технических и технологических трудностей, откуда следует соответствие критерию "промышленная применимость".
Литература
1. Авторское свидетельство СССР: SU 213385 от 12.03.1966 года, кл. 42k, 7/02, «Устройство для измерения нагрузок».
2. Авторское свидетельство СССР: SU 514212 от 15.15.1976 года, МПК G01L 1/16, «Устройство для измерения усилий».
3. Патент Российской Федерации: RU 2320968 от 27.03.2008 г., МПК G01L 1/16, «Устройство для измерения силы сжатия».
4. Авторское свидетельство СССР: SU 1516751 от 23.10.1989 г., МПК G01B 7/00, «Индукционный преобразователь линейных перемещений».
5. Патент США: US 2942212 от 21.06.1960 г., Кл. 336-30, «Датчик положения».
6. Патент Российской Федерации: RU 2367902 от 20.09.2009 г., МПК G01B 7/00, «Индуктивный датчик перемещений» - прототип.
7. Патент Германии: DE 10313021 В3 от 02.09.2004 года, МПК G01B 7/02, «Схема с линейно регулируемым дифференциальным трансформатором LVDT в качестве датчика перемещения или датчика силы и способ использования такой схемы».
| название | год | авторы | номер документа |
|---|---|---|---|
| ЧУВСТВИТЕЛЬНЫЙ ЭЛЕМЕНТ ДАТЧИКА ЛИНЕЙНЫХ СИЛ СЖАТИЯ-РАСТЯЖЕНИЯ | 2009 |
|
RU2401999C1 |
| ЧУВСТВИТЕЛЬНЫЙ ЭЛЕМЕНТ ДАТЧИКА ЛИНЕЙНЫХ СИЛ СЖАТИЯ-РАСТЯЖЕНИЯ | 2011 |
|
RU2459188C1 |
| ИНДУКЦИОННЫЙ ДАТЧИК ПОЛОЖЕНИЯ | 2011 |
|
RU2454625C1 |
| ИНДУКЦИОННЫЙ ДАТЧИК УГЛОВОГО ПОЛОЖЕНИЯ | 2012 |
|
RU2502046C1 |
| ИНДУКЦИОННЫЙ ДАТЧИК ПОЛОЖЕНИЯ | 2012 |
|
RU2507474C1 |
| ИНДУКТИВНЫЙ ДАТЧИК ПЕРЕМЕЩЕНИЙ | 2008 |
|
RU2367902C1 |
| ИНДУКЦИОННЫЙ ДАТЧИК УГЛОВОГО ПОЛОЖЕНИЯ | 2014 |
|
RU2570232C1 |
| Индукционный датчик углового положения | 2017 |
|
RU2655632C1 |
| ИНДУКЦИОННЫЙ ВРАЩАЮЩИЙСЯ ТРАНСФОРМАТОР | 2014 |
|
RU2584010C1 |
| ТЕНЗОМЕТР | 2011 |
|
RU2483277C1 |

Заявленное изобретение относится к области измерительной техники и может быть использовано для точного и долговременного измерения механических усилий или деформаций конструкций в самых различных областях техники.
Заявленный индукционный датчик силы содержит трансформатор механических деформаций (1), выполненный симметричным перпендикулярно оси приложения силы, и имеет две пары параллельных взаимно перемещающихся боковых поверхностей, на которых соответственно закреплены две пары индуктивностей (2), (3) и (4), (5) в форме плоского прямоугольного меандра. Пары индуктивностей (2), (3) и (4), (5) размещены на параллельных диэлектрических подложках. Индуктивности каждой пары установлены с зазором относительно друг друга. Одна из каждой пары индуктивностей (2) и (4) соединена с источником переменного напряжения, а выходы двух других из каждой пары индуктивностей (3) и (5) являются выходом датчика силы.
Технический результат, достигаемый от реализации заявленного изобретения, заключается в повышении точности измерения упругих деформаций и минимизации температурных погрешностей индуктивного датчика. 7 ил.
Индукционный датчик силы, содержащий трансформатор механических деформаций с взаимно перемещающимися поверхностями, на которых соответственно закреплена на параллельных диэлектрических подложках пара индуктивностей в форме плоского прямоугольного меандра, отличающийся тем, что трансформатор механических деформаций выполнен симметричным перпендикулярно оси приложения силы и содержит две пары параллельных взаимно перемещающихся боковых поверхностей, на которых соответственно закреплены две пары индуктивностей, индуктивности каждой пары установлены с зазором относительно друг друга, одна из каждой пары индуктивностей соединена с источником переменного напряжения, а выходы двух других из каждой пары индуктивностей являются выходом датчика силы.
| ИНДУКТИВНЫЙ ДАТЧИК ПЕРЕМЕЩЕНИЙ | 2008 |
|
RU2367902C1 |
| US 2942212 A, 21.06.1960 | |||
| ДИФФЕРЕНЦИАЛЬНЫЙ ИНДУКТИВНЫЙ ДАТЧИК ПЕРЕМЕЩЕНИЙ | 1991 |
|
RU2017059C1 |

