Изобретение относится к области измерительной технике и может быть использовано для контроля положения движущихся частей в широких областях техники, изобретение создавалось для контроля уровня жидкости в баках ракет-носителей (РН), суть изобретения в создании долговечного, наиболее простого и надежного датчика поплавкового типа, в котором алюминиевый поплавок используется как рабочий элемент (РЭ) из парамагнитного материала, взаимодействующий с магнитным полем катушки индуктивности, уменьшение индуктивности при взаимодействии является полезным сигналом, без каких-либо других элементов, имеющих ограничения по надежности и сроку эксплуатации.
Известны измерители уровня, имеющие в качестве чувствительного элемента емкостный датчик (см. патенты RU 2622730 С2, кл. B64D 37/00, G01F 23/00, B64G 1/66; RU 2499232 С1, МПК G01F 23/26; RU 2445584 С1, МПК G01F 23/26; RU 2384481 С1, МПК B64D 37/00, G01F 23/00, G01F 23/26; RU 2650783 С1, МПК: G01F 23/26, G01F 23/265, G01F 23/266), емкость которого изменяется при наличии диэлектрической жидкости. Выводы проводников во внутрь емкости не всегда возможны, если жидкость агрессивная и срок эксплуатации весьма велик, требуются согласующие устройства для формирования выходного сигнала. Емкость является косвенным фактором, по которому можно судить об уровне жидкости с определенными допущениями, высокоточное устройство измерения уровня создать весьма проблематично.
Известен дискретный датчик на герконах (см. патенты RU 2292017 С1, МПК G01F 23/62), требующий наличия магнита в конструкции поплавка, герконы имеют гистерезисную характеристику и чувствительны к величине и распределению магнитного поля от рабочего элемента, применимые для индикации и исключающие создание высокоточных измерительных систем, а также не имеют достаточной надежности при ударных воздействиях и сильных вибраций.
Известен магнитострикционный датчик (RU 2710008 С1, МПК G01F 23/68), требующий электронной схемы для возбуждения и измерения временных и линейных параметров непосредственно на струне, который в режиме сильных вибраций и ударных воздействий может иметь ложные показания. Электронная схема возбуждения и измерения полезного сигнала имеет ограниченный срок эксплуатации.
Известны индуктивные датчики различного назначения, имеющие катушку с одной или несколькими обмотками и рабочий элемент из магнитомягкого (ферромагнитного) материала (RU 2624844 С2, МПК G01B 7/00; RU 2589945 С1, МПК G01B 7/00, G01D 5/22; RU 2327103 С2. МПК G01B 7/04; RU 195552 U1 МПК G01B 7/00)
Известно устройство контроля магнитной восприимчивости среды (RU 163337 U1, МПК G01R 33/16), содержащее две компенсационные и приемную катушки, размещенные параллельно друг другу в одной плоскости и направленные перпендикулярно поверхности исследуемой среды.
Наиболее близким аналогом является индукционный датчик линейных перемещений (RU 2589945 С1, МПК G01B 7/00, G01D 5/22), содержащий две измерительные и одну возбуждающую обмотки, намотанных на каркас из немагнитного материала, сердечник, выполненный из магнитомягкого материала, который соединен механически с контролируемым объектом посредством немагнитного штока. Недостатком данного датчика является большое количество обмоток и невозможность применения в герметичных корпусах из-за того, что сердечник должен перемещаться относительно обмоток.
В основу предлагаемого изобретения поставлена задача расширить функциональные возможности за счет использования внешнего рабочего элемента, который может быть выполнен как из магнитного, так и немагнитного материала, например парамагнетика.
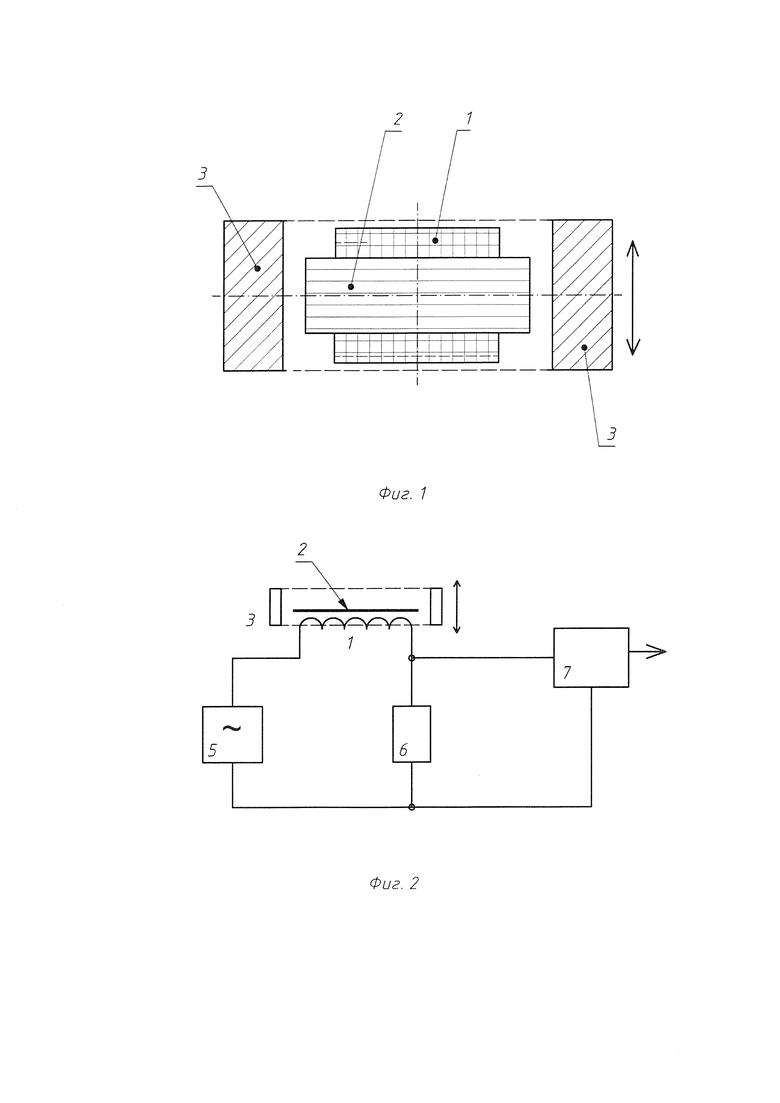
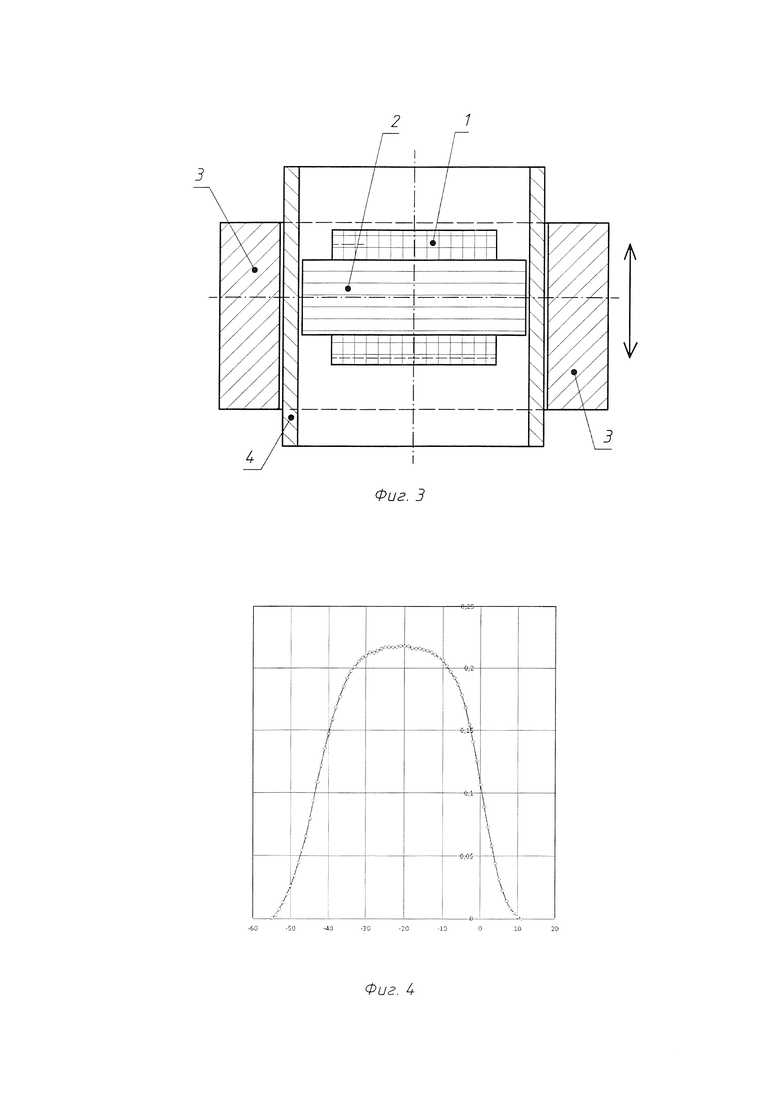
Поставленная задача решается тем, что датчик, фиг. 1, 2, имеет катушку индуктивности, которая содержит обмотку 1 и незамкнутый сердечник 2, выполненный из набора изолированных пластин из материала с высоким значением относительной магнитной проницаемости, обмотка при этом выполняет функции возбуждения и измерения, рабочий элемент 3 может перемещаться поперек обмотки с сердечником, при этом рабочий элемент может охватывать обмотку с сердечником с торцев, которые расположены поперечно перемещению рабочего элемента, рабочий элемент может быть выполнен как из магнитомягкого материала, так и из парамагнетика, датчик может быть помещен в замкнутый металлический немагнитный корпус 4, фиг. 3. Катушка индуктивности запитывается источником переменного тока или напряжения 5, через активное или реактивное сопротивление нагрузки 6, полезный сигнал получают на измерительном устройстве 7.
Преимущество данного технического решения заключается в простоте конструкции, повышении надежности и расширении функциональных возможностей.
Датчики могут быть применены в дискретном уровнемере и помещены в единый герметичный корпус из немагнитного материала, рабочий элемент, поплавок, может быть выполнен подвижный снаружи герметичного корпуса, из парамагнетика, например алюминиевого сплава, или может быть выполнен из неметаллического материала и содержать вставки из парамагнитного материала - алюминия, вольфрама, цезия, платины, хрома, ниобия.
Датчик работает следующим образом: на обмотку через нагрузочное сопротивление 6, подается возбуждающий ток переменной частоты от источника 5, обмотка с разомкнутым сердечником образуют индуктивность, которая изменяется (уменьшается) при перемещении рабочего элемента 3 относительно торца катушки с сердечником, полезный сигнал на измерительном устройстве 7 получают либо с нагрузочного сопротивления 6, либо с обмотки, при этом датчики могут быть включены всеми известными способами мостовых и квадратурных схем с выделением фаз выходных сигналов.
Полезный сигнал с датчика в виде изменяющейся индуктивности в данном датчике порождается парамагнитной магнетизацией (восприимчивостью) парамагнитного материала, слабые значения парамагнитной магнетизации рабочего элемента усиливаются сердечником (как магнитной антенной) из материала с большим значением магнитной проницаемости и приводит к эффекту уменьшения индуктивности до 20-50% в зависимости от геометрии и вида парамагнетика.
Сердечник может быть выполнен из пермаллоевых сплавов типа 50НМА, 81НМА, имеющих относительную магнитную проницаемость до 120000, или из нанокристаллических материалов (Ю.Н. Стародубцев, В.Я. Белозеров, Магнитные свойства аморфных и нанокристаллических сплавов, издательство Уральского университета, Екатеринбург, 2002).
Большой диапазон изменения индуктивности упрощает конструкцию измерительной системы и повышает точность измерений.
Характерный сигнал датчика в виде функции относительного изменения индуктивности при прохождении рабочего элемента приведен на фиг. 4, позволяет производить высокоточную привязку уровня сигнала к перемещению рабочего элемента.
Полезный сигнал не возникает, если рабочий элемент выполнен из диамагнитного материала, такого, как например медь и ее сплавы.
Полезный сигнал с датчика в виде увеличивающейся индуктивности в данном датчике возникает в случае выполнения рабочего элемента из магнитомягкого материала, при этом должно быть замыкание магнитной цепи.
Применение парамагнетиков в рабочем элементе не требует замыкания магнитной цепи, выбранная толщина парамагнетика должна быть не меньше толщины скин-слоя для заданной рабочей частоты тока возбуждения, уменьшение индуктивности происходит за счет взаимодействия обмотки с разомкнутым сердечником с высоким значением магнитной проницаемости и энергии парамагнитной магнетизации в объеме скин-слоя.
Относительное изменение индуктивности обеспечивает стабильность и высокую точность измеряемых пространственных параметров и определяется из соотношения:

где Lп - индуктивность с парамагнитным взаимодействием;
Lк - индуктивность обмотки с разомкнутым сердечником без парамагнитного взаимодействия;
 - парамагнитная восприимчивость материала рабочего элемента;
- парамагнитная восприимчивость материала рабочего элемента;
μ - относительная магнитная проницаемость материала сердечника;
μэ - эквивалентная относительная магнитная проницаемость разомкнутого сердечника;
Vкат - объем магнитного поля, определяемый обмоткой;
Vск - объем скин-слоя при проникновении переменного магнитного поля в материал рабочего элемента, вычисляется интегрированием по распределению магнитного поля.
Формула (1) хорошо согласуется с экспериментальными данными.
Комбинирование в рабочем элементе парамагнитных и магнитомягких материалов дает принципиально новые возможности в создании измерительных устройств для измерения уровня, линейных координат, углового положения и т.д.
Герметичный корпус может быть выполнен из немагнитной нержавеющей стали типа 12Х18Н10Т, что позволяет применять датчик в космической и авиационной технике, химической промышленности для любых видов топлива и жидкостей при различных внешних условиях с неограниченным сроком эксплуатации, с высокой надежностью, точностью и стабильностью.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНДУКТИВНЫЙ ДАТЧИК ЛИНЕЙНОГО ПЕРЕМЕЩЕНИЯ | 2011 |
|
RU2485439C2 |
| ИНДУКТИВНЫЙ ДАТЧИК ПЕРЕМЕЩЕНИЙ | 2008 |
|
RU2367902C1 |
| ИНДУКЦИОННЫЙ ДАТЧИК ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ | 2015 |
|
RU2589945C1 |
| СПОСОБ ТЕМПЕРАТУРНОЙ КОМПЕНСАЦИИ ИНДУКТИВНОГО ДАТЧИКА ПОЛОЖЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2013 |
|
RU2555200C2 |
| ИНДУКЦИОННЫЙ ДАТЧИК ПОЛОЖЕНИЯ | 2012 |
|
RU2507474C1 |
| ИНДУКЦИОННЫЙ ДАТЧИК ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ | 2015 |
|
RU2605641C1 |
| Датчик перемещений с высокой разрешающей способностью | 2022 |
|
RU2816124C2 |
| Индуктивный датчик тахометрического счетчика жидкости | 2016 |
|
RU2625539C1 |
| ИНДУКЦИОННЫЙ ДАТЧИК ПОЛОЖЕНИЯ | 2011 |
|
RU2454625C1 |
| ИЗМЕРИТЕЛЬ РАССТОЯНИЯ МЕЖДУ ДАТЧИКОМ И ОБЪЕКТОМ ИЗ ЭЛЕКТРОПРОВОДЯЩЕГО МАТЕРИАЛА | 2013 |
|
RU2561244C2 |
Изобретение относится к измерительной технике. Датчик содержит обмотку и незамкнутый сердечник, выполненный из набора изолированных пластин из материала с высоким значением относительной магнитной проницаемости, обмотка при этом выполняет функции возбуждения и измерения, рабочий элемент перемещается поперек обмотки с сердечником, которые расположены поперечно перемещению рабочего элемента, рабочий элемент может быть выполнен как из магнитомягкого материала, так и из парамагнетика, датчик может быть помещен в замкнутый металлический немагнитный корпус. Технический результат – упрощение конструкции, повышение надежности, расширение функциональных возможностей датчика. 6 з.п. ф-лы, 4 ил.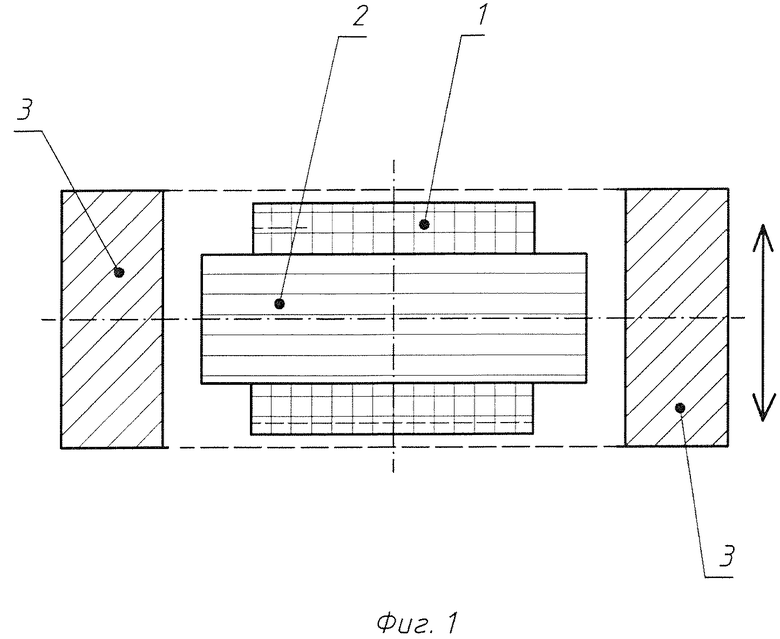
1. Парамагнитный датчик линейных перемещений, содержащий источник переменного тока или напряжения, один выход которого соединен с катушкой индуктивности, состоящей из обмотки, намотанной на незамкнутый сердечник, выполненный из набора изолированных слоев или сплошного ферромагнитного материала с высоким значением относительной магнитной проницаемости, второй вывод катушки индуктивности соединен с нагрузкой с активным или реактивным сопротивлением, второй вывод нагрузки соединен со вторым выводом источника переменного тока или напряжения, измерительное устройство, фиксирующее результат по заданному уровню сигнала, подключенное в соединение выхода нагрузки с катушкой индуктивности, рабочий элемент, имеющий возможность перемещаться вдоль направляющей, отличающийся тем, что катушка индуктивности ориентирована своей осью перпендикулярно направляющей для рабочего элемента, рабочий элемент содержит парамагнитный материал, например алюминий или его сплавы.
2. Парамагнитный датчик линейных перемещений по п. 1, отличающийся тем, что обмотка выполняет функции возбуждения и измерения.
3. Парамагнитный датчик линейных перемещений по п. 1, отличающийся тем, что обмотка может состоять из нескольких частей: обмотки возбуждения и обмотки измерения.
4. Парамагнитный датчик линейных перемещений по п. 1, отличающийся тем, что рабочий элемент может охватывать катушку индуктивности с торцов.
5. Парамагнитный датчик линейных перемещений по п. 1, отличающийся тем, что в качестве направляющей может использоваться корпус.
6. Парамагнитный датчик линейных перемещений по п. 5, отличающийся тем, что корпус может быть выполнен герметизированным.
7. Парамагнитный датчик линейных перемещений по п. 1, отличающийся тем, что в качестве нагрузки может использоваться одна или несколько катушек индуктивности, размещенных в одном корпусе.
| ИНДУКЦИОННЫЙ ДАТЧИК ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ | 2015 |
|
RU2589945C1 |
| Датчик вибраций | 1985 |
|
SU1265489A1 |
| ТЕНЗОМЕТРИЧЕСКИЙ ДАТЧИКnHi&fiTfi3-u-Ks^i^i;^!tAqБИЬЛИСТ1:КА I | 0 |
|
SU315008A1 |
| DE 102007015195 A1, 09.10.2008. | |||

