Изобретение относится к измерительной технике для измерения угловых скоростей и может найти применение в автоматических системах управления и стабилизации.
В технике широко известны гироскопические тахометры (гиротахометры) - гироскопические устройства, предназначенные для определения угловой скорости основания (объекта), на котором оно установлено. В литературе подробно описаны гиротахометры (ГТ), основанные на использовании астатического гироскопа с двумя степенями свободы, движение которого вокруг оси гироузла прибора ограничено упругой связью с корпусом прибора (1).
Для гашения колебаний гироузла и обеспечения определенных динамических характеристик гиротахометров применяют демпферы. К демпфирующим устройствам для гироскопических приборов предъявляются требования в отношении стабильности коэффициента демпфирования и величины коэффициента демпфирования. Демпфирующие устройства должны создавать силы, пропорциональные только скорости движения чувствительного элемента прибора, и не создавать упругих сил и сил трения, а также обеспечивать регулировку коэффициента демпфирования. Кроме этого предъявляются требования по обеспечению минимальных габаритов демпфера и минимального момента инерции подвижного элемента демпфера относительно оси гироузла. Комплексным параметром, определяющим качество гиротахометра с демпфером, является относительный коэффициент затухания или степень успокоения колебаний чувствительного элемента, который определяется выражением (2):
ξ=B/2ωoJx,
где: ξ - относительный коэффициент затухания (степень успокоения колебаний гироузла);
В - коэффициент демпфирования, равный моменту, создаваемому демпфером, когда угловая скорость гироузла составляет 1 рад/сек;
ωо - частота собственных колебаний гироузла;
Jx - момент инерции гироузла относительно выходной оси прибора. Параметр ξ определяет величину перерегулирования и время успокоения чувствительного элемента. Наименьшее время успокоения оказывается при выборе степени успокоения ξ=0,707. Выбор степени успокоения ξ обычно обусловливается требуемой динамикой прибора и обеспечивается подбором соответствующего коэффициента демпфирования В.
Известны гиротахометры с воздушными и жидкостными демпферами поршневого типа, у которых в цилиндре движется поршень, помещенный в цилиндр с очень малым радиальным зазором (3). Известен гиротахометр с поплавковым жидкостным демпфером, состоящим из цилиндра, помещенного с зазором в полом цилиндрическом корпусе, наполненном жидкостью. При повороте цилиндра вокруг оси между его поверхностью и поверхностью корпуса благодаря трению цилиндра о жидкость возникает момент торможения (4).
Наиболее близкими по технической сущности к заявляемому изобретению являются гиротахометры с электромагнитным демпфером, основанным на взаимодействии магнитного потока, создаваемого постоянным магнитом или электромагнитом, с вихревыми токами, наводимыми в металлических деталях (рамке, стакане, диске), связанных с элементами прибора, колебания которого необходимо устранить (3).
Электрический демпфер обладает рядом преимуществ: в нем отсутствует сухое трение; коэффициент демпфирования не зависит от степени разряжения воздуха по сравнению с воздушным демпфером и не зависит от температуры среды по сравнению с жидкостным демпфером. Однако электрический демпфер с высокой степенью гашения колебаний часто имеет значительные габариты и поэтому редко применяется в гиротахометрах.
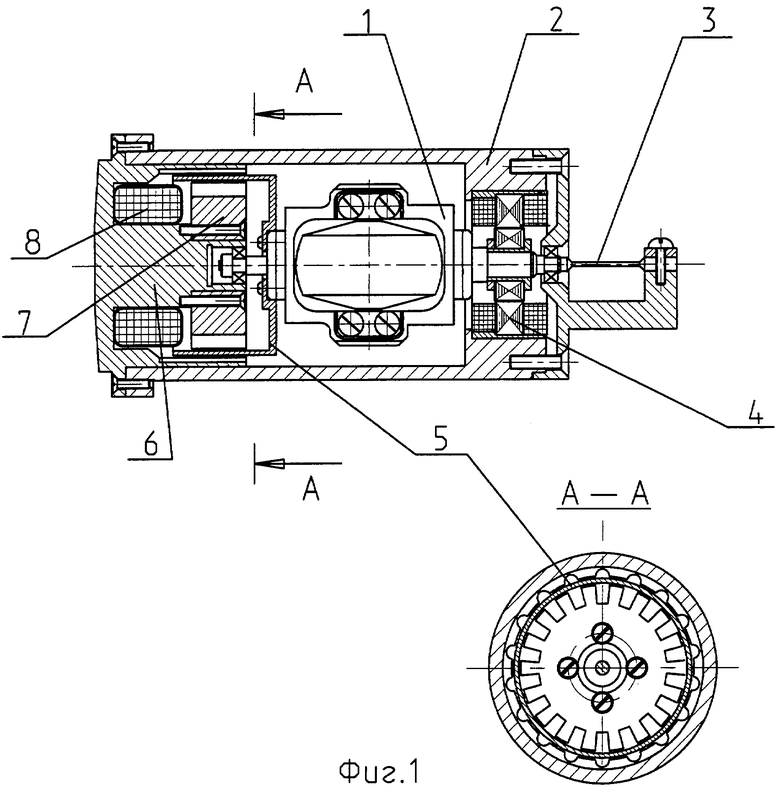
В качестве прототипа принят известный гиротахометр, (5) и (6), представленный на фиг.1.
Гиротахометр содержит гироузел 1, укрепленный на подшипниках в корпусе 2 прибора, торсион (пружину) 3, датчик угла 4 поворота гироузла и электромагнитный демпфер, состоящий из медного стакана 5, жестко связанного с рамкой гироузла 1 и расположенного в воздушном зазоре магнитопровода, образованного корпусом 6 демпфера и крышкой 7 корпуса демпфера, изготовленных из электротехнической стали с высокой магнитной проницаемостью и имеющих явно выраженные полюса со стороны рабочего воздушного зазора (см. фиг.1, сечение А-А). Магнитопровод закреплен на корпусе 2 гиротахометра. В магнитопроводе демпфера имеется катушка 8 с обмоткой.
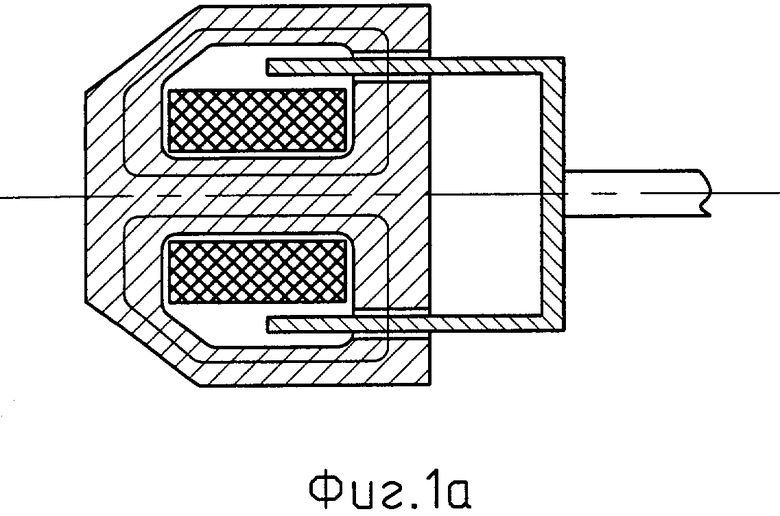
Принцип работы заключается в следующем: при прохождении тока через катушку демпфера вокруг катушки образуется магнитное поле (см. фиг.1а), которое пронизывает медный стакан демпфера. При повороте медного стакана в постоянном магнитном поле в нем возникают вихревые токи, образующие свой магнитный поток. В результате взаимодействия магнитного поля вихревых токов с магнитным полем катушки создается момент, пропорциональный скорости поворота стакана, который и гасит (демпфирует) колебания подвижной части гиротахометра.
Существующая конструкция гиротахометра на базе гиромотора ГМА-4, с частотой собственных колебаний гироузла 10 Гц, электромагнитный демпфер с размерами подвижного стакана ⌀67 мм, длиной 30 мм, толщиной стенки 0.7 мм и с катушкой электромагнита с намагничивающей силой, равной 1600 ампер*витков, обеспечивает степень успокоения колебаний гироузла ξ=0,1. Это значение ξ характеризует низкое демпфирование с большим временем успокоения чувствительного элемента. Выше отмечалось, что для уменьшения времени успокоения гироузла стремятся повысить ξ до величины, приближенной к величине ξ=0,707, за счет повышения коэффициента демпфирования.
Для варианта, если в качестве подвижной части демпфера используется металлический стакан, вращающийся в магнитном поле, коэффициент демпфирования пропорционален квадрату индукции в воздушном зазоре, в третьей степени длине стакана, квадрату радиуса стакана, величине толщины стенки стакана и количеству пар полюсов (3).
Недостатком гиротахометра-прототипа является то, что в нем повышение коэффициента демпфирования возможно за счет увеличения индукции в рабочем воздушном зазоре магнитной системы демпфера и за счет увеличения геометрических размеров стакана. При этом и увеличение индукции в зазоре и геометрических размеров стакана влечет дальнейшее увеличение габаритов гиротахометра. Возможен вариант увеличения индукции в воздушном зазоре за счет повышения нагрузочного тока в обмотке катушки, что приведет к повышенному нагреву прибора и снижению его надежности.
Другим недостатком данного гиротахометра является отсутствие возможности регулировки степени успокоения колебаний гироузла.
Технической задачей заявляемого гиротахометра является повышение степени успокоения колебаний гироузла при одновременном уменьшении габаритов прибора, а также обеспечение возможности регулировки степени успокоения колебаний гироузла.
Технический результат достигается тем, что в заявляемом гиротахометре, содержащем гироузел, установленный на подшипниках в корпусе прибора с возможностью поворота относительно оси подвеса, торсион, электрический демпфер и датчик угла поворота гироузла, согласно изобретению, демпфер выполнен в виде диска из материала с малым удельным сопротивлением, закрепленного на оси гироузла и магнитной системы, закрепленной на корпусе прибора и выполненной в виде двух колец из магнитомягкого материала, расположенных с разных сторон диска по оси прибора с минимальными зазорами и с возможностью перемещения по оси гироузла, при этом на одном кольце со стороны диска расположены высокоэнергетические постоянные магниты с намагниченностью вдоль оси прибора и равномерно расположенные по всей площади кольца с чередующейся полярностью, образуя полное количество пар полюсов, при этом постоянные магниты выполнены, например, в виде секторов с размерами, обеспечивающими полное заполнение площади кольца магнитной системы или с дополнительными межполюсными магнитами с тангенциальной намагниченностью, ориентированными одноименной полярностью к близлежащим полюсам и обеспечивающими максимальную концентрацию магнитного поля в зазоре.
Существенными отличительными признаками заявляемого изобретения являются:
- выполнение ротора демпфера в виде диска из материала с малым удельным сопротивлением (например, медь, алюминий);
- выполнение магнитной системы, закрепленной на корпусе прибора, в виде двух колец из магнитомягкого материала, расположенных с разных сторон диска по оси прибора с минимальными зазорами и с возможностью перемещения по оси гироузла, при этом на одном кольце со стороны диска расположены высокоэнергетические постоянные магниты с намагниченностью вдоль оси прибора и равномерно расположенные по всей площади кольца с чередующейся полярностью, образуя полное количество пар полюсов;
- выполнение постоянных магнитов для обеспечения максимальной магнитной энергии воздушного зазора в виде секторов, позволяющих максимально заполнить ими поверхность магнитопровода, или с дополнительными межполюсными магнитами с тангенциальной намагниченностью, ориентированными одноименной полярностью к близлежащим полюсам.
Проведенный анализ уровня техники, включающий поиск по патентным и научно-техническим источникам информации, позволил установить, что не обнаружено аналогов, характеризующихся признаками, тождественными всей совокупности существенных признаков заявляемого изобретения.
Это позволяет сделать вывод о соответствии заявляемого устройства критерию изобретения «новизна».
Не обнаружено также применение указанных признаков в заявляемой совокупности с другими признаками для достижения указанного результата, следовательно, заявляемое устройство соответствует критерию изобретения «изобретательский уровень».
За счет применения высокоэнергетических постоянных магнитов (например, из сплава Nd-Fe-B с Br≥1,3 Тл, Hcb≥850 кА/м и HcJ≥1000 кА/м) и за счет выполнения постоянных магнитов в виде секторов (например, 16 секторов с размерами, обеспечивающими полное заполнение ими поверхности диска 7) в гиротахометре с параметрами гироузла, как в прототипе, с размерами подвижного диска и дисков магнитной системы, по диаметру не превышающих габариты гиротахометра, при толщине подвижного диска 2 мм, толщине дисков магнитной системы до 4 мм, с размерами постоянных магнитов по оси прибора до 5 мм и с воздушным зазором в магнитной системе до 3,5 мм, достигнуто повышение демпфирования относительно прототипа более чем в 5 раз, а именно степень успокоения доведена до ξ>0,5. За счет применения диска в качестве подвижного элемента демпфера вместо стакана и применения более компактной магнитной системы достигнуто уменьшение габарита гиротахометра по оси прибора на 20%. Использование в устройстве редкоземельных магнитов типа Nd-Fe-B по сравнению с другими типами постоянных магнитов дает совершенно уникальное сочетание рекордно высоких параметров, характеризующих петлю магнитного гистерезиса:
а) рекордные для известных постоянных магнитов значения магнитной индукции;
б) сверхвысокая коэрцитивность (сопротивление размагничиванию), недостижимая на любых других композициях для постоянных магнитов;
в) повышенные прочностные характеристики;
г) строго регламентированная температурная и временная стабильность магнитного потока;
д) термостойкость до высоких температур.
Это объясняет значительное снижение веса, габаритов и, как правило, стоимости магнитных систем (или элементов этих систем) при модернизации приборов и устройств, созданных с использованием магнитов других типов.
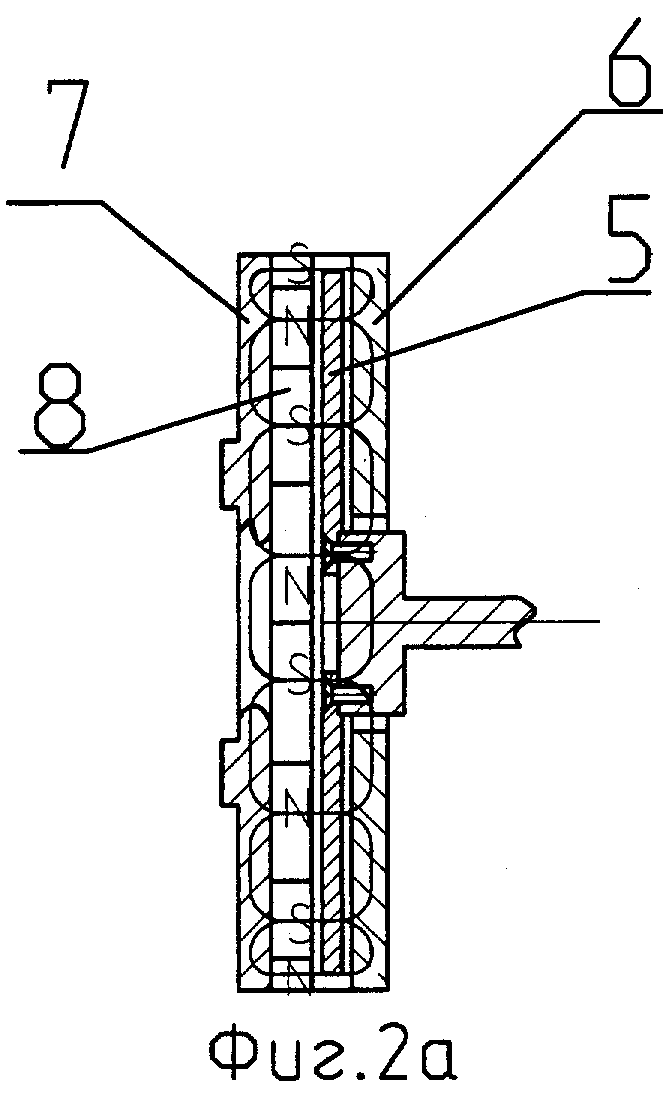
На фиг.1 представлен гиротахометр-прототип, на фиг.2 - предлагаемый гиротахометр, на фиг.2 А-А представлены варианты исполнения постоянных магнитов, на фиг.2а - схема магнитного потока.
Гиротахометр содержит гироузел 1, установленный на подшипниках в корпусе 2 прибора с возможностью поворота относительно оси подвеса, торсион 3 и датчик угла 4 поворота гироузла 1, демпфер, выполненный в виде диска 5 из материала с малым удельным сопротивлением, закрепленного на оси гироузла 1 и магнитной системы, закрепленной на корпусе 2 прибора и выполненной в виде двух колец 6 и 7 из магнитомягкого материала, расположенных с разных сторон диска по оси прибора с минимальными зазорами, при этом на одном кольце 7 со стороны диска 5 расположены высокоэнергетические постоянные магниты 8 с намагниченностью вдоль оси прибора и равномерно расположенные по всей площади кольца с чередующейся полярностью (см. фиг.2, сечение А-А), образуя полное количество пар полюсов.
Постоянные магниты 8 для обеспечения максимальной магнитной энергии воздушного зазора выполнены в виде секторов, позволяющих максимально заполнить ими поверхность магнитопровода (см. на фиг.2, сечение А-А вариант 1), или с дополнительными межполюсными магнитами 11 с тангенциальной намагниченностью, ориентированными одноименной полярностью к близлежащим полюсам, обеспечивающие максимальную концентрацию магнитного поля в зазоре (см. фиг.2, сечение А-А вариант 2, выносной элемент I).
Вокруг каждой пары полюсов постоянных магнитов образуется магнитное поле, которое замыкается по дискам 6 и 7 и пронизывает рабочий воздушный зазор магнитной системы, как показано на фиг.2а.
Для обеспечения возможности перемещения диска 7 с постоянными магнитами по оси гироузла он установлен на крышке 9, связанной с корпусом 2 прибора через регулировочные прокладки 10.
В части эффективности погашения собственных колебаний гироузла гиротахометр работает следующим образом.
Так как собственное движение гироузла представляет собой постепенно затухающие колебания гироузла вокруг положения равновесия, то в процессе колебаний гироузла будет колебаться и жестко связанный с ним диск 5. При колебаниях (повороте) диска 5, расположенного в зазоре магнитной системы, который пронизан постоянными магнитными полями, образованными постоянными магнитами, в нем возникают вихревые токи, образующие свои магнитные потоки. В результате взаимодействия магнитных полей вихревых токов с магнитными полями постоянных магнитов создается момент, пропорциональный скорости поворота диска 5, который и гасит колебания гироузла.
В электротехнике известно, что величина магнитной индукции в воздушном зазоре обратно пропорциональна величине воздушного зазора. Поэтому изменением величины воздушного зазора в демпфере можно регулировать (изменять) величину индукции в воздушном зазоре, а следовательно, и коэффициент демпфирования, и степень успокоения гироузла.
В предлагаемой конструкции гиротахометра регулировка степени успокоения гироузла обеспечивается изменением величины воздушного зазора в магнитной системе путем перемещения по оси прибора диска 7 с постоянными магнитами, закрепленного на крышке 9, за счет установки необходимого количества прокладок 10 между корпусом 2 прибора и крышкой 9.
Так как в заявляемом устройстве в качестве подвижной части демпфера используется металлический диск, вращающийся в магнитном поле, то коэффициент демпфирования пропорционален квадрату индукции в воздушном зазоре, величине диаметра постоянного магнита в третьей степени, радиусу и толщине диска и количеству пар полюсов (3).
Таким образом, наиболее эффективно повысить коэффициент демпфирования можно за счет увеличения индукции в воздушном зазоре магнитной системы демпфера и за счет увеличения поверхности постоянных магнитов со стороны рабочего воздушного зазора.
Повышение коэффициента демпфирования возможно также за счет увеличения количества пар полюсов в магнитной системе. Однако расчет магнитного поля, проведенный с использованием пакета компьютерных программ Ansoft Maxwell 3D v11.1, показывает, что бесконечное увеличение количества пар полюсов не обеспечивает эффективного увеличения демпфирующего момента и при этом за счет миниатюризации магнитов ухудшается технологичность конструкции. В гиротахометре с указанными выше параметрами оптимальное количество пар полюсов определяется диапазоном от 6 до 8.
Таким образом, в заявляемом устройстве обеспечено достижение цели изобретения в части уменьшения соотношения габаритов гиротахометра к степени успокоения гироузла и возможности регулировки степени успокоения гироузла.
Источники информации
1. С.С.Ривкин «Теория гироскопических устройств», часть II, Ленинград: «Судостроение», 1964, стр.119-170).
2. «Гироскопические системы» часть III. под редакцией Д.С.Пельпора, Москва: «Высшая школа», 1972, стр.436-437).
3. Н.Ф.Бабаева, В.М.Ерофеев и др. «Расчет и проектирование элементов гироскопических устройств», Ленинград: «Машиностроение», 1967 г., стр.251-254, 256-260).
4. Е.А.Никитин, А.А.Балашова «Проектирование дифференцирующих и интегрирующих гироскопов и акселерометров», Москва: «Машиностроение», 1969, стр.15-16).
5. В.В.Корнеев, М.И.Кузнецов, Л.П.Кузьмин, К.И.Павличук «Основы автоматики и танковые автоматические системы» под редакцией д.т.н. профессора В.В.Корнеева, издание академии бронетанковых войск имени маршала Малиновского, Москва, 1976, стр.316-320.
6. «Система 2Э28М (2Э28М2), альбом рисунков к техническому описанию», Москва: Ордена Трудового Красного Знамени военное издательство МО СССР, 1979, стр.15-17).
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидротахометр | 1972 |
|
SU437905A1 |
| Гидротахометр | 1979 |
|
SU845008A1 |
| ГИРОСТАБИЛИЗАТОР ОПТИЧЕСКИХ ЭЛЕМЕНТОВ | 2016 |
|
RU2625643C1 |
| Гиромагнитный дистанционный датчик курса | 1944 |
|
SU67814A1 |
| Гиротахометр | 1974 |
|
SU547693A1 |
| ИНЕРЦИОННЫЙ МАГНИТОЖИДКОСТНЫЙ ДЕМПФЕР (ВАРИАНТЫ) | 2013 |
|
RU2549592C1 |
| МАГНИТОЭЛЕКТРИЧЕСКИЙ ИЗМЕРИТЕЛЬНЫЙ МЕХАНИЗМ | 1996 |
|
RU2117301C1 |
| МАГНИТНАЯ СИСТЕМА | 2018 |
|
RU2683882C1 |
| Инерционный демпфер | 1990 |
|
SU1778884A1 |
| СПОСОБ ДЕМПФИРОВАНИЯ КОЛЕБАНИЙ РОТОРОВ И МАГНИТОДИНАМИЧЕСКИЙ ПОДШИПНИК-ДЕМПФЕР | 2006 |
|
RU2328632C2 |
Изобретение относится к измерительной технике и может найти применение в автоматических системах управления и стабилизации. Гиротахометр содержит гироузел, установленный на подшипниках в корпусе прибора с возможностью поворота относительно оси подвеса, торсион, электрический демпфер и датчик угла поворота гироузла. Демпфер выполнен в виде диска из материала с малым удельным сопротивлением, закрепленного на оси гироузла и магнитной системы, закрепленной на корпусе прибора и выполненной в виде двух колец из магнитомягкого материала, расположенных с разных сторон диска по оси прибора с минимальными зазорами и с возможностью перемещения по оси гироузла. На одном кольце со стороны диска расположены высокоэнергетические постоянные магниты с намагниченностью вдоль оси прибора и равномерно расположенные по всей площади кольца с чередующейся полярностью, образуя полное количество пар полюсов. Техническим результатом гиротахометра является повышение степени успокоения колебаний гироузла при одновременном уменьшении габаритов прибора, а также обеспечение возможности регулировки степени успокоения колебаний гироузла. 2 з.п. ф-лы, 4 ил.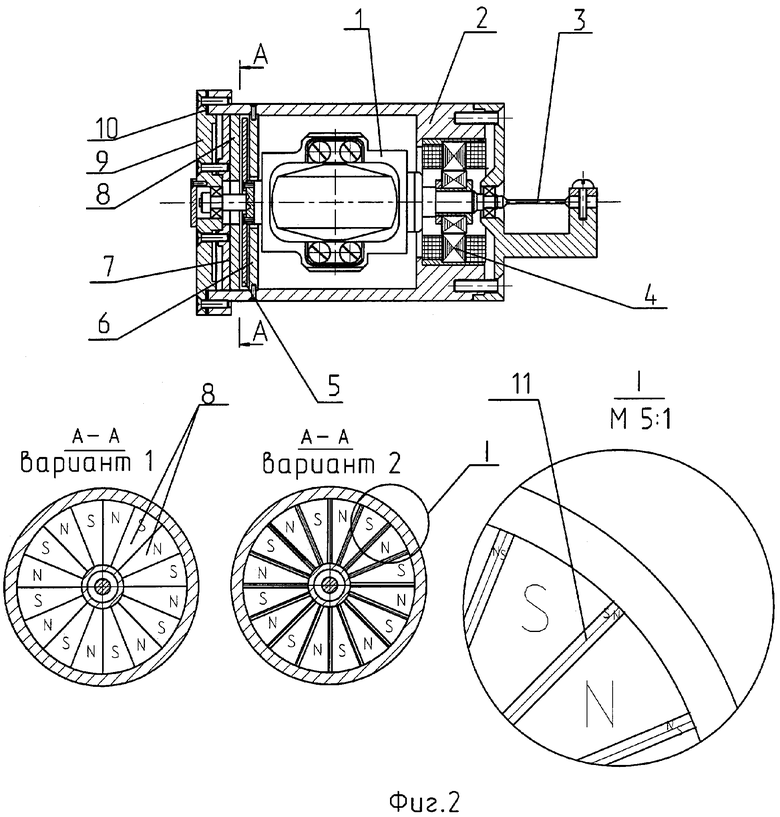
1. Гиротахометр, содержащий гироузел, укрепленный на подшипниках в корпусе прибора, торсион (пружину), датчик угла поворота гироузла и электрический демпфер, отличающийся тем, что демпфер выполнен в виде диска из материала с малым удельным сопротивлением, закрепленного на оси гироузла, и магнитной системы, закрепленной на корпусе прибора и выполненной в виде двух колец из магнитомягкого материала, расположенных с разных сторон диска по оси прибора с минимальными зазорами и с возможностью перемещения по оси гироузла, при этом на одном кольце со стороны диска расположены высокоэнергетические постоянные магниты с намагниченностью вдоль оси прибора и равномерно расположенные по всей площади кольца с чередующейся полярностью, образуя полное количество пар полюсов.
2. Гиротахометр по п.1, отличающийся тем, что постоянные магниты выполнены в виде секторов с размерами, обеспечивающими полное заполнение ими площади кольца магнитной системы.
3. Гиротахометр по п.1 или 2, отличающийся тем, что постоянные магниты выполнены с дополнительными межполюсными магнитами с тангенциальной намагниченностью, ориентированными одноименной полярностью к близлежащим полюсам.
| КОНОВАЛОВ С.Ф | |||
| и др | |||
| Гироскопические системы | |||
| Проектирование гироскопических систем, часть III | |||
| - M.: Высшая школа, 1980, с.73-76 | |||
| Гиротахометр | 1974 |
|
SU547693A1 |
| Гидротахометр | 1972 |
|
SU437905A1 |
| ГИРОТАХОМЕТР | 0 |
|
SU257166A1 |
| ТРУБНАЯ ДРЕНАЖНАЯ СИСТЕМА | 0 |
|
SU169934A1 |

